Frenet-Serret equations with variable proper acceleration in Minkowski spacetime
Pith reviewed 2026-06-27 18:18 UTC · model grok-4.3
The pith
Frenet-Serret curvature and torsion for timelike curves in flat spacetime are expressed via Gram-Schmidt from the four-velocity and its derivatives.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
In Minkowski spacetime the Frenet-Serret equations for a timelike worldline admit proper-time-dependent curvature and torsion. The Gram-Schmidt orthonormalization of the four-velocity, its first derivative (proportional to four-acceleration), second derivative (four-jerk), and third derivative (four-snap) directly supplies the Frenet-Serret curvature as the magnitude of the acceleration and the torsion as the appropriate orthogonal component of the jerk; the next curvature parameter likewise follows from the snap. This identification yields explicit curvature functions once the jerk invariant and torsion are given as functions of proper time, together with the corresponding simplified system
What carries the argument
Gram-Schmidt construction of the Frenet-Serret tetrad from the four-velocity and its successive proper-time derivatives, which equates the intrinsic curvature and torsion to kinematic invariants of the acceleration, jerk and snap.
If this is right
- Explicit analytic curvature profiles are obtained once the jerk invariant and torsion are specified as functions of proper time.
- The frame evolution equations reduce to a simpler closed system for those analytic choices.
- Trajectories whose frame rotates out of the acceleration plane are described by nonzero torsion.
- The same relations connect higher-order kinematic invariants to the remaining Frenet-Serret parameters.
Where Pith is reading between the lines
- The explicit link between kinematic invariants and frame parameters may permit direct numerical construction of worldlines for arbitrary prescribed acceleration profiles.
- The method supplies a concrete starting point for studying the transition from constant-acceleration hyperbolic motion to more general accelerated trajectories.
- Similar identifications could be tested in the presence of electromagnetic fields by adding the Lorentz force to the jerk equation.
Load-bearing premise
Curvature and torsion may be chosen as arbitrary functions of proper time while still defining a consistent timelike worldline in Minkowski spacetime.
What would settle it
Integration of the Frenet-Serret equations for a chosen pair of non-constant curvature and torsion functions, followed by direct verification that the resulting four-velocity remains normalized to -1 for all proper time.
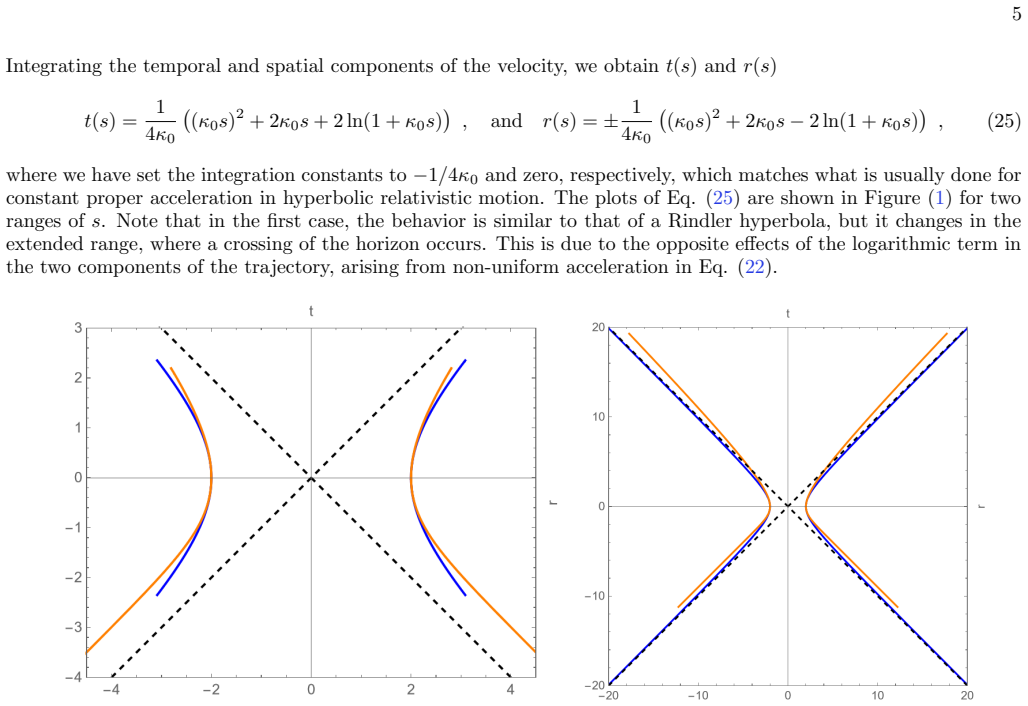
Figures
read the original abstract
We study Frenet-Serret equations for timelike worldlines in Minkowski spacetime with proper-time-dependent curvature and torsion. This corresponds to relativistic motion with non-uniform proper acceleration and, when torsion is included, to trajectories whose Frenet-Serret frame rotates beyond the acceleration plane. Using the Gram-Schmidt construction of the tetrad from the four-velocity and its derivatives, we relate the intrinsic Frenet-Serret parameters to kinematic quantities such as proper acceleration, four-jerk, and four-snap. We then consider simple analytic cases for the jerk invariant and torsion, obtaining explicit curvature profiles and reduced Frenet-Serret equations. These examples clarify how non-constant acceleration and torsion modify the geometry of accelerated relativistic motion.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper studies the Frenet-Serret (FS) equations for timelike worldlines in Minkowski spacetime with proper-time-dependent curvature κ(τ) and torsion τ(τ). It employs the Gram-Schmidt orthonormalization of the four-velocity and its successive derivatives to express the FS parameters in terms of the proper acceleration, four-jerk, and four-snap invariants. Analytic cases are then solved for chosen forms of the jerk invariant and torsion, yielding explicit curvature profiles and reduced FS equations.
Significance. If the derivations are correct, the work supplies explicit kinematic interpretations of variable proper acceleration and out-of-plane frame rotation for relativistic trajectories. The analytic examples demonstrate concrete effects of non-constant parameters. Credit is due for grounding the construction in the standard Gram-Schmidt procedure and the FS existence theorem, which guarantees that any sufficiently smooth positive κ(τ) and τ(τ) determine a unique timelike curve up to initial data, with no additional integrability conditions required.
minor comments (3)
- Abstract: the description of the analytic cases would be strengthened by naming the specific functional forms chosen for the jerk invariant and torsion (e.g., constant, linear, or exponential), even if the explicit expressions appear later in the text.
- §2 (Gram-Schmidt construction): the relation between the FS curvature and the magnitude of the four-acceleration is standard, but the step connecting the torsion to the jerk and snap invariants would benefit from an intermediate equation showing the projection orthogonal to the acceleration plane.
- The manuscript would profit from a short comparison paragraph noting how the variable-acceleration results reduce to the constant-acceleration hyperbolic motion when κ is taken constant and torsion vanishes.
Simulated Author's Rebuttal
We thank the referee for the positive summary, the recognition of the Gram-Schmidt grounding and the FS existence theorem, and the recommendation of minor revision. No specific major comments appear in the report.
Circularity Check
No significant circularity detected
full rationale
The derivation applies the standard Gram-Schmidt orthonormalization procedure to successive derivatives of the four-velocity, expressing the Frenet-Serret curvature (proper acceleration) and torsion directly in terms of the kinematic invariants (jerk and snap). This is a direct, parameter-free algebraic identity in Minkowski space that follows from the definitions of the tetrad and the Frenet-Serret theorem for timelike curves; the analytic examples simply solve the resulting ODE system for chosen functional forms of the invariants. No fitted parameters are renamed as predictions, no self-citation supplies a load-bearing uniqueness theorem or ansatz, and the construction does not reduce any claimed result to its own inputs by definition. The central relations are therefore independent of the paper's own outputs.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Minkowski spacetime with timelike worldlines
- standard math Existence of a smooth tetrad via Gram-Schmidt from four-velocity and derivatives
Reference graph
Works this paper leans on
-
[1]
J. R. Letaw, Stationary world lines and the vacuum excitation of noninertial detectors, Phys. Rev. D23, 1709 (1981)
1981
-
[2]
Bound on Rindler trajectories in Black Hole spacetime
K. Paithankar and S. Kolekar, Bound on Rindler trajectories in a black hole spacetime, Phys. Rev. D99, 064012 (2019), arXiv:1901.04674 [gr-qc]
work page internal anchor Pith review Pith/arXiv arXiv 2019
-
[3]
M. U. Shahzad and A. Sadaf, Rindler trajectories in cloud of strings in 3rd order Lovelock gravity, Gen. Rel. Grav.56, 18 (2024)
2024
-
[4]
Rindler, Hyperbolic motion in curved space time, Phys
W. Rindler, Hyperbolic motion in curved space time, Phys. Rev.119, 2082 (1960)
2082
-
[5]
Rindler, Kruskal Space and the Uniformly Accelerated Frame, American Journal of Physics34, 1174 (1966)
W. Rindler, Kruskal Space and the Uniformly Accelerated Frame, American Journal of Physics34, 1174 (1966)
1966
-
[6]
Semay, Observer with a constant proper acceleration, European Journal of Physics27, 1157 (2006)
C. Semay, Observer with a constant proper acceleration, European Journal of Physics27, 1157 (2006)
2006
-
[7]
I. Perez Roman and H. C. Rosu, Relativistic hyperbolic motion and its higher order kinematic quantities, Rev. Mex. Fis. 68, 060702 (2022), arXiv:2206.04203 [gr-qc]
-
[8]
J. R. Letaw and J. D. Pfautsch, The stationary coordinate systems in flat spacetime, Journal of Mathematical Physics23, 425 (1982)
1982
-
[9]
H. C. Rosu, Stationary and nonstationary scalar vacuum field noises, Nuovo Cim. B115, 1049 (2000), arXiv:gr-qc/9912056
work page internal anchor Pith review Pith/arXiv arXiv 2000
-
[10]
H. C. Rosu, Quantum vacuum radiation and detection proposals, Int. J. Theor. Phys.44, 493 (2005)
2005
-
[11]
M. R. R. Good, M. Temirkhan, and T. Oikonomou, Stationary Worldline Power Distributions, Int. J. Theor. Phys.58, 2942 (2019), arXiv:1907.01751 [gr-qc]
work page internal anchor Pith review Pith/arXiv arXiv 2019
- [12]
-
[13]
J. M. Pons and F. de Palol, Observers with constant proper acceleration, constant proper jerk, and beyond, Gen. Rel. Grav.51, 80 (2019), arXiv:1811.06267 [gr-qc]
work page internal anchor Pith review Pith/arXiv arXiv 2019
-
[14]
R. D. Carlitz and R. S. Willey, Reflections on moving mirrors, Phys. Rev. D36, 2327 (1987)
1987
-
[15]
M. R. R. Good and E. V. Linder, Eternal and evanescent black holes and accelerating mirror analogs, Phys. Rev. D97, 065006 (2018), arXiv:1711.09922 [gr-qc]
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[16]
Abramowitz and I
M. Abramowitz and I. A. Stegun,Handbook of mathematical functions with formulas, graphs, and mathematical tables. 10th printing, with corrections.(New York: John Wiley & Sons, New York, 1972)
1972
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.