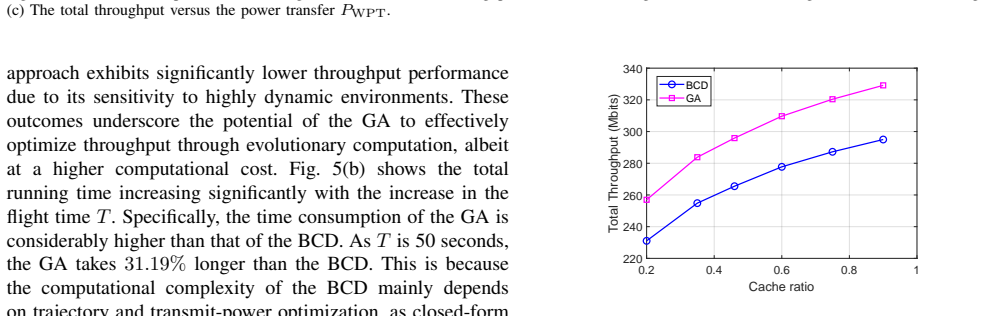
Deterministic versus Stochastic Optimization for Joint Path Planning and Dynamic Time Splitting in Multiple-UAV-Cached IoT Networks
Pith reviewed 2026-06-27 15:03 UTC · model grok-4.3
The pith
Joint optimization of dynamic time splitting, UAV trajectories, and power yields at least 31% throughput improvement in multi-UAV IoT networks.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
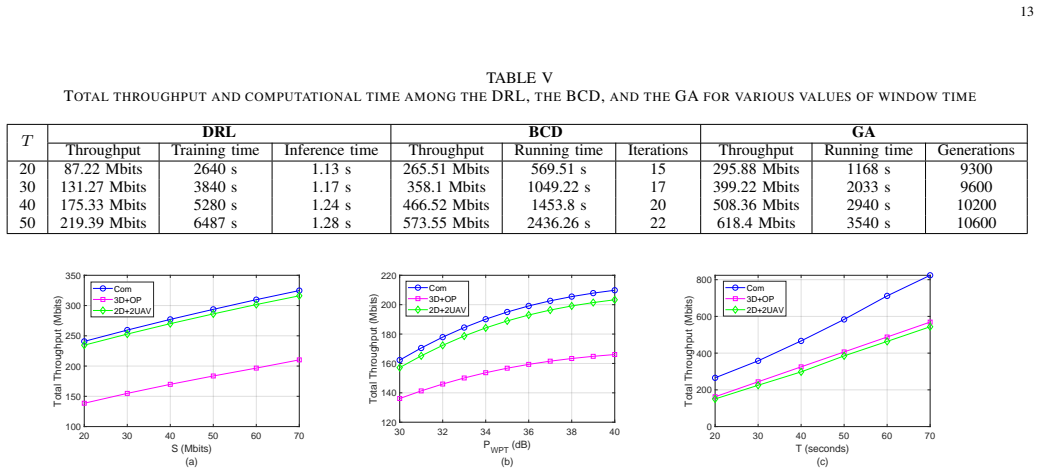
The paper claims that an efficient alternating algorithm based on block coordinate descent, using KKT conditions to obtain a closed-form expression for the optimal dynamic time splitting ratio, combined with a genetic algorithm using one-point crossover and rank-based selection, allows effective maximization of total throughput by jointly optimizing the DTS ratio, UAV trajectory, and transmission power in caching-enabled UAV-aided IoT networks, achieving at least 31% improvement over benchmarks.
What carries the argument
Block coordinate descent (BCD) alternating optimization with KKT-derived closed-form dynamic time splitting (DTS) ratio, alongside a genetic algorithm (GA) for stochastic search.
Load-bearing premise
The non-convex joint optimization problem can be decomposed and solved alternately via BCD with closed-form sub-solutions without substantial loss in optimality.
What would settle it
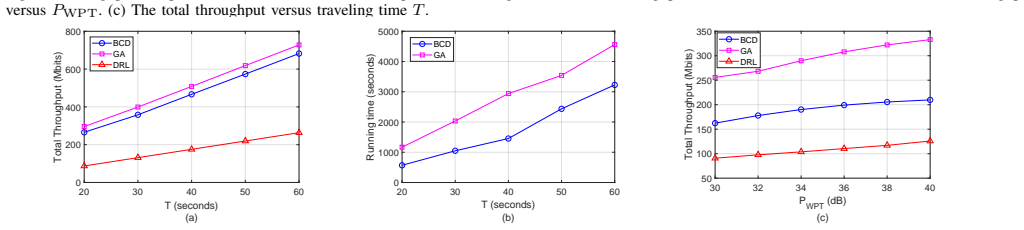
Comparing the throughput achieved by the proposed BCD and GA methods against a globally optimal solution obtained via exhaustive search or convex relaxation in a small-scale scenario would reveal if the 31% gain holds or if optimality gap is large.
Figures

read the original abstract
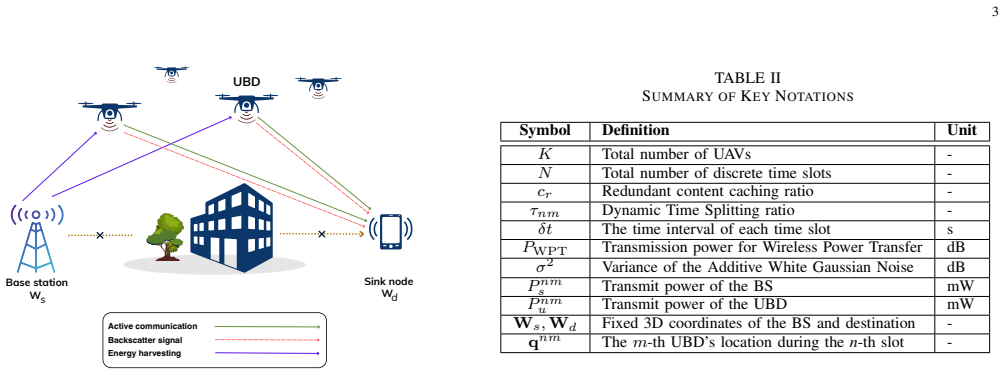
This paper examines wireless-powered Internet of Things (IoT) networks involving multiple unmanned aerial vehicles (UAVs) equipped with backscatter and caching technologies to relay and transmit signals. For data communication and energy harvesting (EH), the source transmits information and power to UAVs using the dynamic time splitting (DTS) method. UAVs use harvested energy for passive communication (backscatter) and for active communication (transmitting information) to the destination. The primary objective is to maximize the total throughput by jointly optimizing the DTS ratio, trajectory, and transmission power, leveraging the UAVs' caching capability. This optimization problem is challenging due to its non-convexity. Therefore, an efficient alternating algorithm using the block coordinate descent (BCD) method is proposed to optimize each variable given the fixed values of the other parameters. By applying the Karush-Kuhn-Tucker (KKT) conditions, we derive a closed-form expression for the optimal DTS ratio, significantly reducing computation time. The optimal values for the other two parameters are determined using the BCD. In order to thoroughly assess the effectiveness of various solutions for the original problem, this paper introduces an approach leveraging a genetic algorithm (GA). The GA in this context employs a one-point crossover method, value mutation, and rank-based selection based on fitness values. Numerical results show that the BCD and GA achieve at least 31% throughput improvement over the benchmarks, with reduced computational time. These findings demonstrate the performance gain and practical feasibility of our solutions in caching-enabled UAV-aided IoT networks.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims that in wireless-powered multi-UAV IoT networks with backscatter and caching, jointly optimizing the dynamic time splitting (DTS) ratio, UAV trajectories, and transmit powers via block coordinate descent (BCD) with a KKT-derived closed-form DTS solution (plus a genetic algorithm baseline) yields at least 31% throughput improvement over benchmarks while reducing computation time.
Significance. If the reported gains prove robust under stronger benchmarks and the BCD solutions are shown to be at least stationary points with verifiable convergence, the work would offer a practical alternating-optimization template for non-convex resource allocation in UAV-assisted energy-harvesting networks; the explicit KKT closed-form for the DTS subproblem is a concrete algorithmic contribution that could reduce online computation.
major comments (3)
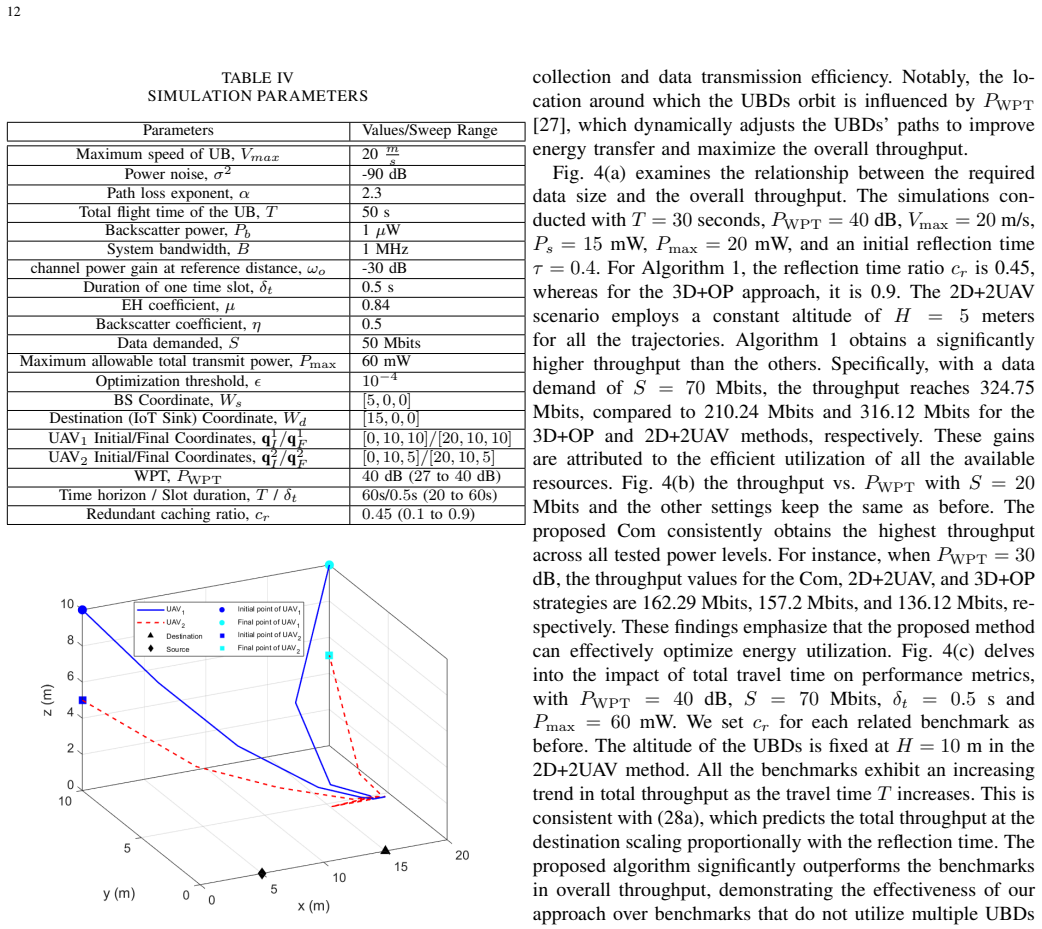
- [Abstract] Abstract: the headline claim of 'at least 31% throughput improvement' is load-bearing for the paper's contribution, yet the abstract supplies neither the definitions of the benchmark schemes, the number of Monte-Carlo trials, error bars, nor the precise simulation parameters (number of UAVs, EH efficiency, caching sizes) needed to reproduce or statistically assess the margin.
- [Abstract] Abstract (method description): while fixing other blocks may admit a KKT closed-form for the DTS ratio, the joint problem remains non-convex in trajectory (distance-dependent rates) and power; BCD is stated to be 'efficient' but no convergence analysis, stationarity guarantee, or verification that the trajectory subproblem satisfies the conditions for BCD convergence (continuous differentiability, compactness) is provided, so the 31% figure may reflect local-search quality rather than method superiority.
- [Abstract] Abstract: the GA is introduced 'to thoroughly assess' the BCD solutions, yet no details are given on population size, number of generations, mutation rate, or comparison against a global solver or tighter relaxation; without these, it is unclear whether GA serves as an independent validation or merely another heuristic.
minor comments (1)
- [Abstract] Abstract: the phrase 'reduced computational time' is asserted without any quantitative comparison (e.g., CPU seconds or iteration counts) or reference to a table/figure that would allow readers to judge the claimed efficiency gain.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on the abstract. We address each major comment below and will incorporate revisions to improve clarity and reproducibility while preserving the paper's contributions.
read point-by-point responses
-
Referee: [Abstract] Abstract: the headline claim of 'at least 31% throughput improvement' is load-bearing for the paper's contribution, yet the abstract supplies neither the definitions of the benchmark schemes, the number of Monte-Carlo trials, error bars, nor the precise simulation parameters (number of UAVs, EH efficiency, caching sizes) needed to reproduce or statistically assess the margin.
Authors: We agree that the abstract would benefit from additional context to support the reported gains. In the revised manuscript, we will expand the abstract with concise definitions of the benchmark schemes (e.g., equal time splitting and fixed trajectories), a reference to the simulation section for the number of Monte-Carlo trials and error bars shown in figures, and key parameters such as the number of UAVs and EH efficiency. This addresses reproducibility without exceeding abstract length limits. revision: yes
-
Referee: [Abstract] Abstract (method description): while fixing other blocks may admit a KKT closed-form for the DTS ratio, the joint problem remains non-convex in trajectory (distance-dependent rates) and power; BCD is stated to be 'efficient' but no convergence analysis, stationarity guarantee, or verification that the trajectory subproblem satisfies the conditions for BCD convergence (continuous differentiability, compactness) is provided, so the 31% figure may reflect local-search quality rather than method superiority.
Authors: The observation on non-convexity is accurate. We will add a discussion in the revised paper on the BCD convergence behavior, supported by numerical evidence of rapid stabilization, and clarify that solutions are locally optimal rather than globally guaranteed. A full stationarity proof for the trajectory subproblem is not feasible without altering the approach, but we will note the practical convergence and conditions where BCD applies. revision: partial
-
Referee: [Abstract] Abstract: the GA is introduced 'to thoroughly assess' the BCD solutions, yet no details are given on population size, number of generations, mutation rate, or comparison against a global solver or tighter relaxation; without these, it is unclear whether GA serves as an independent validation or merely another heuristic.
Authors: The GA parameters (population size, generations, mutation rate) are specified in the numerical results section. We will revise the abstract to briefly reference these settings and the GA's role as a heuristic benchmark for comparison, directing readers to the full implementation details in the manuscript. This will clarify its purpose without claiming global optimality. revision: yes
Circularity Check
No circularity: standard alternating optimization with KKT closed-form subproblem
full rationale
The derivation uses block coordinate descent to alternate between DTS ratio (closed-form via KKT), trajectory, and power. These are standard convexification and stationarity techniques applied to a non-convex joint problem; the closed-form DTS is derived from the Lagrangian of the subproblem given fixed other blocks, not defined in terms of the final throughput value. GA is presented as an independent heuristic benchmark. No self-citation chain, no fitted parameter renamed as prediction, and no ansatz smuggled via prior work. Numerical 31% gain is an empirical simulation outcome, not a tautological reduction to inputs. The approach is self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption The joint optimization problem is non-convex.
Reference graph
Works this paper leans on
-
[1]
A survey on applications of unmanned aerial vehicles using machine learning,
K. Teixeira, G. Miguel, H. S. Silva, and F. Madeiro, “A survey on applications of unmanned aerial vehicles using machine learning,”IEEE Access, vol. 11, pp. 117 582–117 621, 2023
2023
-
[2]
Intelligent drone-assisted anonymous authentication and key agreement for 5G/B5G vehicular ad-hoc networks,
J. Zhang, J. Cui, H. Zhong, I. Bolodurina, and L. Liu, “Intelligent drone-assisted anonymous authentication and key agreement for 5G/B5G vehicular ad-hoc networks,”IEEE Trans. Netw. Sci. Eng., vol. 8, no. 4, pp. 2982–2994, 2021
2021
-
[3]
Joint trajectory and energy efficiency optimization for multi-UA V assisted offloading,
A. Gao, Z. Shao, Y . Hu, and W. Liang, “Joint trajectory and energy efficiency optimization for multi-UA V assisted offloading,” inProc. IGARSS, 2022
2022
-
[4]
Joint optimization of trajectory and resource allocation in secure UA V relaying communications for internet of things,
Z. Na, C. Ji, B. Lin, and N. Zhang, “Joint optimization of trajectory and resource allocation in secure UA V relaying communications for internet of things,”IEEE Internet Things J., vol. 9, no. 17, pp. 16 284–16 296, 2022
2022
-
[5]
Joint optimization framework for minimization of device energy consumption in transmis- sion rate constrained UA V-assisted IoT network,
A. Mondal, D. Mishra, G. Prasad, and A. Hossain, “Joint optimization framework for minimization of device energy consumption in transmis- sion rate constrained UA V-assisted IoT network,”IEEE Internet Things J., vol. 9, no. 12, pp. 9591–9607, 2022
2022
-
[6]
IRS-assisted laser-powered UA V energy harvesting for IoT networks,
A. Kumar and B. Singh, “IRS-assisted laser-powered UA V energy harvesting for IoT networks,”IEEE Internet Things J., vol. 11, no. 5, pp. 7890–7901, 2024
2024
-
[7]
Green UA V-enabled internet-of-things network with AI-assisted NOMA for disaster management,
M. A. Jamshed and F. Ayaz, “Green UA V-enabled internet-of-things network with AI-assisted NOMA for disaster management,”IEEE Internet Things J., vol. 10, no. 17, pp. 6500–6514, 2023
2023
-
[8]
Symbiotic PBFT con- sensus: Cognitive backscatter communications-enabled wireless PBFT consensus,
H. Luo, Q. Zhang, H. Yu, G. Sun, and S. Xu, “Symbiotic PBFT con- sensus: Cognitive backscatter communications-enabled wireless PBFT consensus,” inProc. GLOBECOM, 2023
2023
-
[9]
Backscattering interference channel characteristics in full-duplex underwater optical wireless com- munication,
X. Zhang, W. Liu, N. Huang, and Z. Xu, “Backscattering interference channel characteristics in full-duplex underwater optical wireless com- munication,” inProc. ICCSN, 2023. 15
2023
-
[10]
An overview of backscatter communication technique for performing wireless sensing in green communication networks,
S. Sood, “An overview of backscatter communication technique for performing wireless sensing in green communication networks,” inProc. PEEIC, 2023
2023
-
[11]
Energy-efficient uav backscatter communication with joint trajectory design and resource optimization,
G. Yang, R. Dai, and Y .-C. Liang, “Energy-efficient uav backscatter communication with joint trajectory design and resource optimization,” IEEE Trans. Wireless Commun., vol. 20, no. 2, pp. 926–941, 2021
2021
-
[12]
Resource and trajectory optimization for secure communications in dual unmanned aerial vehicle mobile edge computing systems,
W. Lu, Y . Ding, Y . Gao, S. Hu, Y . Wu, N. Zhao, and Y . Gong, “Resource and trajectory optimization for secure communications in dual unmanned aerial vehicle mobile edge computing systems,”IEEE Trans. Industr. Inform., vol. 18, no. 4, pp. 2704–2713, 2022
2022
-
[13]
Energy-efficient UA V commu- nication with 3D trajectory optimization,
Z. Guan, S. Wang, L. Gao, and W. Xu, “Energy-efficient UA V commu- nication with 3D trajectory optimization,” inProc. ICCC, 2021
2021
-
[14]
Joint communication and computation resource scheduling of a solar-powered UA V-assisted com- munication system for platooning vehicles,
H. Tian, M. Yan, L. Dai, and P. Yang, “Joint communication and computation resource scheduling of a solar-powered UA V-assisted com- munication system for platooning vehicles,” inProc. ICMEE, 2023
2023
-
[15]
Uav-enabled wireless power transfer: A tutorial overview,
L. Xie, X. Cao, J. Xu, and R. Zhang, “Uav-enabled wireless power transfer: A tutorial overview,”IEEE Trans. Green Commun. Netw., vol. 5, no. 4, pp. 2042–2064, 2021
2042
-
[16]
UA V-aided wireless power transfer and data collection in rician fading,
Y . Liu, K. Xiong, Y . Lu, Q. Ni, P. Fan, and K. B. Letaief, “UA V-aided wireless power transfer and data collection in rician fading,”IEEE J. Sel. Areas Commun., vol. 39, no. 10, pp. 3097–3113, 2021
2021
-
[17]
Energy minimization in ris-assisted uav-enabled wireless power transfer systems,
H. Ren, Z. Zhang, Z. Peng, L. Li, and C. Pan, “Energy minimization in ris-assisted uav-enabled wireless power transfer systems,”IEEE Internet Things J., vol. 10, no. 7, pp. 5794–5809, 2023
2023
-
[18]
Self-energized UA V-assisted scheme for cooperative wireless relay networks,
D. N. K. Jayakody, T. D. P. Perera, A. Ghrayeb, and M. O. Hasna, “Self-energized UA V-assisted scheme for cooperative wireless relay networks,”IEEE Trans. Veh. Technol., vol. 69, no. 1, pp. 578–592, 2020
2020
-
[19]
UA V-enabled wireless power transfer with base station charging and UA V power consumption,
H. Yan, Y . Chen, and S.-H. Yang, “UA V-enabled wireless power transfer with base station charging and UA V power consumption,”IEEE Trans. Veh. Technol., vol. 69, no. 11, pp. 12 883–12 896, 2020
2020
-
[20]
UA V-assisted mobile edge computing with backscatter-aided IoT devices: Task scheduling and resource allocation,
M. Sheng, J. Liu, R. Zhang, G. Li, and W. Xu, “UA V-assisted mobile edge computing with backscatter-aided IoT devices: Task scheduling and resource allocation,”IEEE Internet Things J., vol. 10, no. 6, pp. 4942–4955, 2023
2023
-
[21]
Secure throughput optimization for cache-enabled multi-UA Vs networks,
F. Fazel, J. Abouei, M. Jaseemuddin, A. Anpalagan, and K. N. Pla- taniotis, “Secure throughput optimization for cache-enabled multi-UA Vs networks,”IEEE Internet Things J., vol. 9, no. 10, pp. 7783–7801, 2022
2022
-
[22]
Joint hybrid caching and replace- ment scheme for UA V-assisted vehicular edge computing networks,
Y . Liu, C. Yang, X. Chen, and F. Wu, “Joint hybrid caching and replace- ment scheme for UA V-assisted vehicular edge computing networks,” IEEE Trans. Intell. Veh., vol. 9, no. 1, pp. 866–878, 2024
2024
-
[23]
Content caching in HAP-assisted multi-UA V networks using hierarchical federated learn- ing,
A. Masood, T.-V . Nguyen, T. P. Truong, and S. Cho, “Content caching in HAP-assisted multi-UA V networks using hierarchical federated learn- ing,” inProc. ICTC, 2021, pp. 1160–1162
2021
-
[24]
A UA V-enabled data dissemination protocol with proactive caching and file sharing in V2X networks,
R. Zhang, R. Lu, X. Cheng, N. Wang, and L. Yang, “A UA V-enabled data dissemination protocol with proactive caching and file sharing in V2X networks,”IEEE Trans. Commun., vol. 69, no. 6, pp. 3930–3942, 2021
2021
-
[25]
Joint cooperative caching and power control for UA V-enabled vehicular IoT networks,
Z. Zhao, X. Zhang, H. Li, K. Deng, and K. Wu, “Joint cooperative caching and power control for UA V-enabled vehicular IoT networks,” IEEE Internet Things J., vol. 11, no. 3, pp. 2190–2204, 2024
2024
-
[26]
Throughput maximization for UA V-aided backscatter communication networks,
M. Hua, L. Yang, C. Li, Q. Wu, and A. L. Swindlehurst, “Throughput maximization for UA V-aided backscatter communication networks,” IEEE Trans. Commun., vol. 68, no. 2, pp. 1254–1270, 2020
2020
-
[27]
Throughput maximization for backscatter- and cache-assisted wireless powered UA V technology,
D.-H. Tran, S. Chatzinotas, and B. Ottersten, “Throughput maximization for backscatter- and cache-assisted wireless powered UA V technology,” IEEE Trans. Veh. Technol., vol. 71, no. 5, pp. 5187–5202, 2022
2022
-
[28]
Joint optimization of trajectory and communication in multi-UA V assisted backscatter communication networks,
Y . Du, Z. Chen, J. Hao, and Y . Guo, “Joint optimization of trajectory and communication in multi-UA V assisted backscatter communication networks,”IEEE Access, vol. 10, pp. 40 861–40 871, 2022
2022
-
[29]
Outage analysis of UA V-aided networks with underlaid ambient backscatter communications,
X. Jiang, M. Sheng, N. Zhao, J. Liu, D. Niyato, and F. R. Yu, “Outage analysis of UA V-aided networks with underlaid ambient backscatter communications,”IEEE Trans. Wireless Commun., vol. 22, no. 11, pp. 7492–7505, 2023
2023
-
[30]
Energy efficient RIS-assisted UA V networks using twin delayed DDPG technique,
B. Adhikari, A. S. Khwaja, M. Jaseemuddin, A. Anpalagan, and A. Nallanathan, “Energy efficient RIS-assisted UA V networks using twin delayed DDPG technique,”IEEE Trans. Wireless Commun., vol. 23, no. 12, pp. 18 423–18 439, 2024
2024
-
[31]
Con- strained multiobjective decomposition evolutionary algorithm for UA V- assisted mobile edge computing networks,
L. Zhang, F. Wen, Q. Zhang, G. Gui, H. Sari, and F. Adachi, “Con- strained multiobjective decomposition evolutionary algorithm for UA V- assisted mobile edge computing networks,”IEEE Internet Things J., vol. 11, no. 22, pp. 36 673–36 687, 2024
2024
-
[32]
When learning meets dynamics: Distributed user connectivity maximization in UA V-based communication networks,
B. Li, S. Tripathi, S. Hosain, R. Zhang, M. Wang, and J. Xie, “When learning meets dynamics: Distributed user connectivity maximization in UA V-based communication networks,”IEEE Trans. Cogn. Commun. Netw., pp. 1–1, 2025
2025
-
[33]
Energy minimization in UA V-aided networks: Actor-critic learning for constrained scheduling optimization,
Y . Yuan, L. Lei, T. X. Vu, S. Chatzinotas, S. Sun, and B. Ottersten, “Energy minimization in UA V-aided networks: Actor-critic learning for constrained scheduling optimization,”IEEE Trans. Veh. Technol., vol. 70, no. 5, pp. 5028–5042, 2021
2021
-
[34]
T. Van Chien, B. T. Duc, N. X. Tung, V . D. Nguyen, W. Khalid, S. Chatzinotas, and L. Hanzo, “Single-and multi-objective stochastic optimization for next-generation networks in the generative AI and quantum computing era,”arXiv preprint arXiv:2601.02175, 2026
-
[35]
En- hancing spectral efficiency: the impact of RIS elements association on multi-user cell-free wireless networks,
M. Ravan, F. S. Tabataba, M. S. Fazel, and H. Yanikomeroglu, “En- hancing spectral efficiency: the impact of RIS elements association on multi-user cell-free wireless networks,”IEEE Open Journal of the Communications Society, vol. 6, pp. 1895 – 1913, 2025
1913
-
[36]
Performance analysis of fluid antenna system under spatially- correlated Rician fading channels,
J. Huangfu, Z. Song, T. Hou, A. Li, Y . Liu, A. Nallanathan, and K.-K. Wong, “Performance analysis of fluid antenna system under spatially- correlated Rician fading channels,”IEEE Trans. Wireless Commun., vol. 25, pp. 1394 – 1407, 2025
2025
-
[37]
The optimal control policy for RF-powered backscatter communication networks,
B. Lyu, C. You, Z. Yang, and G. Gui, “The optimal control policy for RF-powered backscatter communication networks,”IEEE Trans. Veh. Technol., vol. 67, no. 3, pp. 2804–2808, 2018
2018
-
[38]
Energy minimization for wireless communication with rotary-wing UA V,
Y . Zeng, J. Xu, and R. Zhang, “Energy minimization for wireless communication with rotary-wing UA V,”IEEE Trans. Wireless Commun., vol. 18, no. 4, pp. 2329–2345, 2019
2019
-
[39]
Resource allocation for full- duplex-enabled cognitive backscatter networks,
S. Xiao, H. Guo, and Y .-C. Liang, “Resource allocation for full- duplex-enabled cognitive backscatter networks,”IEEE Trans. Wireless Commun., vol. 18, no. 6, pp. 3222–3235, 2019
2019
-
[40]
Riding on the primary: A new spectrum sharing paradigm for wireless-powered IoT devices,
X. Kang, Y .-C. Liang, and J. Yang, “Riding on the primary: A new spectrum sharing paradigm for wireless-powered IoT devices,”IEEE Trans. Wireless Commun., vol. 17, no. 9, pp. 6335–6347, 2018
2018
-
[41]
Backscatter relay communications powered by wireless energy beamforming,
S. Gong, X. Huang, J. Xu, W. Liu, P. Wang, and D. Niyato, “Backscatter relay communications powered by wireless energy beamforming,”IEEE Trans. Commun., vol. 66, no. 7, pp. 3187–3200, 2018
2018
-
[42]
I. S. Gradshteyn and I. M. Ryzhik,Table of integrals, series, and products. Academic press, 2014
2014
-
[43]
A unified algorithmic framework for block-structured optimization involving big data: With applications in machine learning and signal processing,
M. Hong, M. Razaviyayn, Z.-Q. Luo, and J.-S. Pang, “A unified algorithmic framework for block-structured optimization involving big data: With applications in machine learning and signal processing,”IEEE Signal Process. Mag., vol. 33, no. 1, pp. 57–77, 2016
2016
-
[44]
S. P. Boyd and L. Vandenberghe,Convex optimization. Cambridge university press, 2004
2004
-
[45]
Advances in convex optimization: Interior-point methods, cone programming, and applications,
S. Boyd, “Advances in convex optimization: Interior-point methods, cone programming, and applications,” inProc. CDC, 2002
2002
-
[46]
Securing UA V communi- cations via joint trajectory and power control,
G. Zhang, Q. Wu, M. Cui, and R. Zhang, “Securing UA V communi- cations via joint trajectory and power control,”IEEE Trans. Wireless Commun., vol. 18, no. 2, pp. 1376–1389, 2019
2019
-
[47]
CVX users’ guide,
M. Grant, S. Boyd, and Y . Ye, “CVX users’ guide,” 2009
2009
-
[48]
Resource allocation and basestation placement in downlink cellular networks assisted by multiple wireless powered UA Vs,
S. Yin, L. Li, and F. R. Yu, “Resource allocation and basestation placement in downlink cellular networks assisted by multiple wireless powered UA Vs,”IEEE Trans. Veh. Technol., vol. 69, no. 2, pp. 2171– 2184, 2020
2020
-
[49]
Decentralized computation offloading for multi- user mobile edge computing: A deep reinforcement learning approach,
Z. Chen and X. Wang, “Decentralized computation offloading for multi- user mobile edge computing: A deep reinforcement learning approach,” EURASIP J. Wirel. Commun. Netw., vol. 2020, no. 1, p. 188, 2020
2020
-
[50]
Fast genetic algorithm path planner for fixed-wing military UA V using GPU,
V . Roberge, M. Tarbouchi, and G. Labont ´e, “Fast genetic algorithm path planner for fixed-wing military UA V using GPU,”IEEE Trans. Aerosp. Electron. Syst., vol. 54, no. 5, pp. 2105–2117, 2018
2018
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.