RAM: Reachability Across Morphologies
Pith reviewed 2026-06-27 16:40 UTC · model grok-4.3
The pith
A morphology-conditioned neural network serves as a fast differentiable surrogate for robot pose reachability that generalizes to unseen body shapes.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
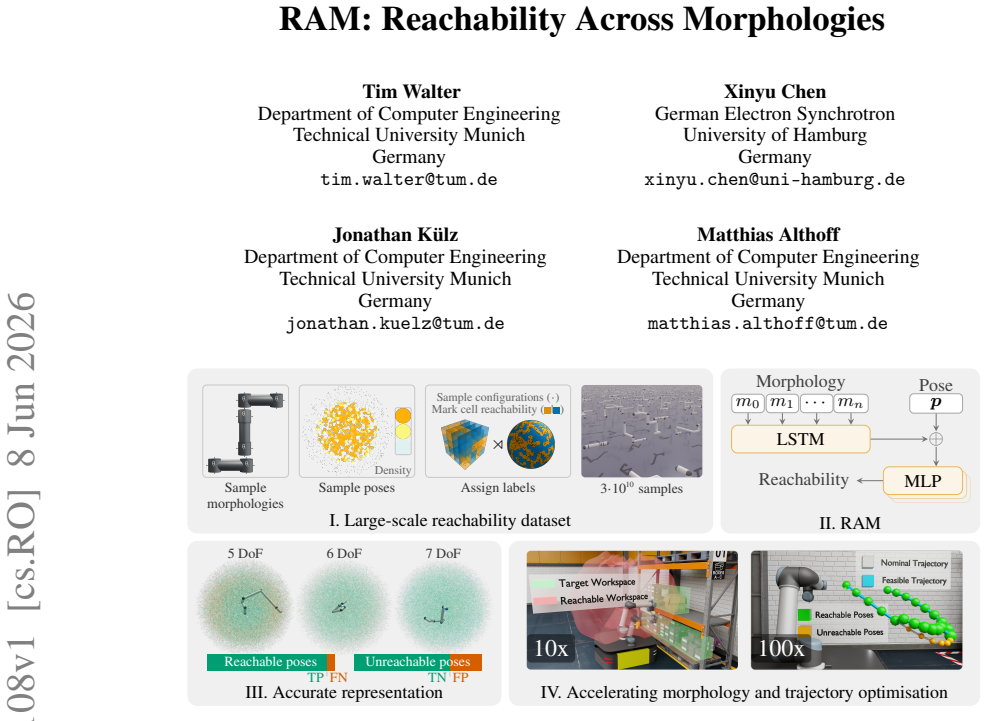
We introduce Reachability Across Morphologies (RAM): a morphology-conditioned, implicit neural representation that acts as a fast, differentiable surrogate for pose reachability, generalising to unseen morphologies while inherently accounting for self-collisions. Trained solely on forward-kinematics data, the model delivers an F1-score of 86 percent at nanosecond inference, outperforming the baseline by 14 percent and reducing inference time by three orders of magnitude.
What carries the argument
morphology-conditioned implicit neural representation that maps robot shape parameters together with a candidate pose to a reachability probability
If this is right
- Reachability queries become feasible inside real-time control or simulation loops.
- Gradient-based morphology optimization can be performed at interactive speeds.
- Trajectory optimization benefits from two-order-of-magnitude speed-ups without sacrificing collision awareness.
- A single trained model replaces per-morphology workspace computations for families of robots.
- Differentiability enables end-to-end learning pipelines that include reachability constraints.
Where Pith is reading between the lines
- The same implicit-representation approach could be extended to other robot properties such as force transmission or stability margins.
- Real-time deployment inside reinforcement-learning environments would allow agents to learn morphology-aware policies without explicit collision engines.
- Dataset scaling laws observed for forward kinematics might apply to other kinematic or dynamic properties if similar volume of data can be generated.
- Integration with differentiable simulators would let designers jointly optimize morphology, actuation, and control under reachability constraints.
Load-bearing premise
Samples generated only from forward kinematics contain enough information for the network to learn both generalization across shapes and correct self-collision behavior.
What would settle it
Run the trained model on a held-out morphology whose self-collision patterns differ from the training distribution and measure whether it assigns high reachability scores to poses that physically intersect.
Figures
read the original abstract
Many stages of the robotic lifecycle, from morphology synthesis to operation, rely fundamentally on the reachable workspace. However, current methods for approximating workspaces are slow, imprecise, or tied to a single morphology. We introduce Reachability Across Morphologies (RAM): a morphology-conditioned, implicit neural representation that acts as a fast, differentiable surrogate for pose reachability, generalising to unseen morphologies while inherently accounting for self-collisions. To train RAM, we publish a large-scale dataset of $3\cdot10^{10}$ samples generated solely from forward kinematics. Experiments show that our model achieves an $ F_1$-score of $86\%$ at nanosecond inference, outperforming the baseline by $14\%$ while reducing inference time by three orders of magnitude. We further demonstrate speed-ups of one and two orders of magnitude for gradient-based morphology and trajectory optimisation, respectively. Website: https://timwalter.github.io/ram.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces Reachability Across Morphologies (RAM), a morphology-conditioned implicit neural representation trained on 3·10^10 forward-kinematics samples that serves as a fast, differentiable surrogate for pose reachability. It claims to generalize to unseen morphologies while inherently accounting for self-collisions, reports an F1-score of 86% at nanosecond inference (14% above baseline), and demonstrates speed-ups in gradient-based morphology and trajectory optimization.
Significance. If the generalization and self-collision claims hold with proper validation, the work would supply a practical, morphology-agnostic tool for workspace queries that could accelerate morphology synthesis, planning, and optimization loops in robotics by orders of magnitude.
major comments (2)
- [Abstract] Abstract: the central claim that RAM 'inherently accounting for self-collisions' lacks support in the described training procedure. The dataset is generated solely from forward kinematics, which produces only positive (reachable) end-effector poses without mesh intersection tests, negative labels, or any collision signal; consequently the implicit function can at best reproduce the kinematic workspace and cannot discover collision-induced unreachability.
- [Abstract] Abstract and experiments section: aggregate F1 and timing numbers are reported without any description of the train/test split, morphology sampling strategy, self-collision labeling procedure (if any), or ablation on generalization to held-out morphologies; these omissions make it impossible to verify that the reported performance actually supports the generalization claim.
minor comments (1)
- [Abstract] The abstract states the dataset size as $3\cdot10^{10}$ but supplies no information on how morphologies were sampled or how the implicit representation is conditioned on morphology parameters.
Simulated Author's Rebuttal
We thank the referee for the careful review and constructive feedback on our work. We address each major comment below and commit to revisions where the concerns are valid.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim that RAM 'inherently accounting for self-collisions' lacks support in the described training procedure. The dataset is generated solely from forward kinematics, which produces only positive (reachable) end-effector poses without mesh intersection tests, negative labels, or any collision signal; consequently the implicit function can at best reproduce the kinematic workspace and cannot discover collision-induced unreachability.
Authors: We agree that the referee's analysis is correct. The dataset generation uses only forward kinematics to produce positive reachable samples and includes no mesh intersection tests, negative labels, or collision signals. Consequently, the model approximates the kinematic workspace and cannot inherently account for self-collisions. We will revise the abstract, introduction, and any related claims to remove or qualify the self-collision statement and accurately describe the model's scope as a kinematic reachability surrogate. revision: yes
-
Referee: [Abstract] Abstract and experiments section: aggregate F1 and timing numbers are reported without any description of the train/test split, morphology sampling strategy, self-collision labeling procedure (if any), or ablation on generalization to held-out morphologies; these omissions make it impossible to verify that the reported performance actually supports the generalization claim.
Authors: We acknowledge the omissions in the abstract and the need for clearer experimental details. While the full manuscript describes the overall dataset of 3·10^10 FK samples and reports aggregate metrics, it does not sufficiently detail the train/test split, morphology sampling strategy for held-out testing, or include an explicit ablation on generalization. We will expand the abstract with a concise description of these elements, confirm that no self-collision labeling was used, and add a dedicated ablation subsection in the experiments to demonstrate performance on unseen morphologies. revision: yes
Circularity Check
No circularity in derivation chain
full rationale
The paper presents an empirical neural network trained on an externally generated forward-kinematics dataset of 3·10^10 samples and evaluated on held-out generalization metrics. No equations, parameters, or claims in the provided text reduce reported performance (F1-score, inference time) to quantities defined by the model itself or by self-citation chains. The central claim of a morphology-conditioned implicit representation is an approximation learned from independent data rather than a self-referential construction. The self-collision accounting is an empirical assertion about what the trained model captures, not a definitional reduction of the result to its inputs.
Axiom & Free-Parameter Ledger
free parameters (1)
- Neural network architecture and hyperparameters
axioms (1)
- domain assumption Forward-kinematics samples alone suffice to label reachability including self-collisions for arbitrary morphologies
Reference graph
Works this paper leans on
- [1]
-
[2]
Y . Dai, S. He, X. Nie, X. Rui, S. Li, and S. He. Research on Reconfiguration Strategies for Self-reconfiguring Modular Robots: A Review.Journal of Intelligent & Robotic Systems, 110 (2), 2024
2024
-
[3]
M. Qin, J. Brawer, and B. Scassellati. Robot tool use: A survey.Frontiers in Robotics and AI, 9, 2023
2023
-
[4]
Deroo, B
B. Deroo, B. Pousett, E. Aertbeliën, W. Decré, and H. Bruyninckx. The Need for Task-Specific Execution in Robot Manipulation: Skill Design for Energy-Efficient Control. InIEEE Int. Conf. on Automation Science and Engineering (CASE), pages 1–7, 2023
2023
-
[5]
Schiele, S
S. Schiele, S. Baumgartner, S. Laudahn, and T. C. Lueth. Automated design of task specific additively manufacturable coupled serial chain mechanisms for tracing predefined planar tra- jectories. InProc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pages 3047–3052, 2022
2022
-
[6]
E. M. Hoffman, D. Costanzi, G. Fadini, N. Miguel, A. D. Prete, and L. Marchionni. Address- ing Reachability and Discrete Component Selection in Robotic Manipulator Design Through Kineto-Static Bi-Level Optimization.IEEE Robotics and Automation Letters, 10(3):2263– 2270, 2025
2025
-
[7]
S. Ha, S. Coros, A. Alspach, J. Kim, and K. Yamane. Computational co-optimization of design parameters and motion trajectories for robotic systems.The International Journal of Robotics Research, 37(13-14):1521–1536, 2018
2018
-
[8]
R. S. Hartenberg and J. Denavit.Kinematic Synthesis of Linkages. McGraw-Hill, 1964
1964
-
[9]
Shirafuji and K
S. Shirafuji and K. Shimamura. Kinematic Synthesis of a Serial Manipulator Using Gradient- Based Optimization on Lie Groups.IEEE Robotics and Automation Letters, 10(3):2550–2557, 2025
2025
-
[10]
K. M. Lynch and F. C. Park.Modern Robotics. Cambridge University Press, 2017
2017
-
[11]
D. L. Pieper.The Kinematics of Manipulators under Computer Control. Stanford University, 1969
1969
-
[12]
Zacharias, C
F. Zacharias, C. Borst, and G. Hirzinger. Capturing robot workspace structure: Representing robot capabilities. InProc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pages 3229–3236, 2007
2007
-
[13]
Chirikjian and I
G. Chirikjian and I. Ebert-Uphoff. Numerical convolution on the Euclidean group with ap- plications to workspace generation.IEEE Transactions on Robotics and Automation, 14(1): 123–136, 1998
1998
-
[14]
Vahrenkamp, T
N. Vahrenkamp, T. Asfour, G. Metta, G. Sandini, and R. Dillmann. Manipulability analysis. InProc. of the IEEE-RAS Int. Conf. on Humanoid Robots (Humanoids), pages 568–573, 2012. 10
2012
-
[15]
Y . Han, J. Pan, M. Xia, L. Zeng, and Y .-J. Liu. Efficient SE(3) Reachability Map Generation via Interplanar Integration of Intra-planar Convolutions. InProc. of the IEEE Int. Conf. on Robotics and Automation (ICRA), pages 1854–1860, 2021
2021
-
[16]
Leibrandt, L
K. Leibrandt, L. da Cruz, and C. Bergeles. Designing Robots for Reachability and Dexterity: Continuum Surgical Robots as a Pretext Application.IEEE Transactions on Robotics, 39(4): 2989–3007, 2023
2023
-
[17]
Sitzmann, J
V . Sitzmann, J. N. Martel, A. W. Bergman, D. B. Lindell, and G. Wetzstein. Implicit neural rep- resentations with periodic activation functions. InProc. of the Int. Conf. on Neural Information Processing Systems (NeurIPS), pages 7462–7473, 2020
2020
-
[18]
Mescheder, M
L. Mescheder, M. Oechsle, M. Niemeyer, S. Nowozin, and A. Geiger. Occupancy networks: Learning 3D reconstruction in function space. InProc. of the IEEE Conf. on Computer Vision and Pattern Recognition (CVPR), pages 4460–4470, 2019
2019
-
[19]
Limoyo, F
O. Limoyo, F. Mari ´c, M. Giamou, P. Alexson, I. Petrovi´c, and J. Kelly. Generative Graphical Inverse Kinematics.IEEE Transactions on Robotics, 41:1002–1018, 2025
2025
-
[20]
Diankov.Automated Construction of Robotic Manipulation Programs
R. Diankov.Automated Construction of Robotic Manipulation Programs. PhD thesis, Carnegie Mellon University, 2018
2018
-
[21]
Ostermeier, J
D. Ostermeier, J. Külz, and M. Althoff. Automatic Geometric Decomposition for Analytical Inverse Kinematics.IEEE Robotics and Automation Letters, 10(10):9964–9971, 2025
2025
-
[22]
C. Yasutake, Z. Kingston, and B. Plancher. HJCD-IK: GPU-accelerated inverse kinematics through batched hybrid jacobian coordinate descent. arXiv:2510.07514, 2025
-
[23]
Beeson and B
P. Beeson and B. Ames. TRAC-IK: An open-source library for improved solving of generic inverse kinematics. InProc. of the IEEE-RAS Int. Conf. on Humanoid Robots (Humanoids), pages 928–935, 2015
2015
-
[24]
Sundaralingam, S
B. Sundaralingam, S. K. S. Hari, A. Fishman, C. Garrett, K. Van Wyk, V . Blukis, A. Millane, H. Oleynikova, A. Handa, F. Ramos, N. Ratliff, and D. Fox. CuRobo: Parallelized collision- free robot motion generation. InProc. of the IEEE Int. Conf. on Robotics and Automation (ICRA), pages 8112–8119, 2023
2023
-
[25]
T. von Oehsen, A. Fabisch, S. Kumar, and F. Kirchner. Comparison of Distal Teacher Learning with Numerical and Analytical Methods to Solve Inverse Kinematics for Rigid-Body Mecha- nisms. arXiv:2003.00225, 2020
-
[26]
B. Ames, J. Morgan, and G. Konidaris. IKFlow: Generating diverse inverse kinematics solu- tions.IEEE Robotics and Automation Letters, 7(3):7177–7184, 2022
2022
-
[27]
Bensadoun, S
R. Bensadoun, S. Gur, N. Blau, and L. Wolf. Neural inverse kinematic. InProc. of the Int. Conf. on Machine Learning (ICML), pages 1787–1797, 2022
2022
-
[28]
Abdel-Malek and J
K. Abdel-Malek and J. Yang. Workspace boundaries of serial manipulators using manifold stratification.The International Journal of Advanced Manufacturing Technology, 28(11): 1211–1229, 2006
2006
-
[29]
R. F. Cavelli, P. D. Cen Cheng, and M. Indri. Modeling the Reachability Space of Robotic Manipulators through Ellipsoid Equations.Journal of Intelligent & Robotic Systems, 111(3), 2025
2025
-
[30]
J. J. Park, P. Florence, J. Straub, R. Newcombe, and S. Lovegrove. DeepSDF: Learning con- tinuous signed distance functions for shape representation. InProc. of the IEEE Conf. on Computer Vision and Pattern Recognition (CVPR), pages 165–174, 2019. 11
2019
-
[31]
B. Mildenhall, P. P. Srinivasan, M. Tancik, J. T. Barron, R. Ramamoorthi, and R. Ng. NeRF: Representing scenes as neural radiance fields for view synthesis. arXiv:2003.08934, 2020
- [32]
- [33]
-
[34]
Y . Li, X. Chi, A. Razmjoo, and S. Calinon. Configuration Space Distance Fields for Manipu- lation Planning. InProc. of Robotics: Science and Systems (RSS), volume 20, 2024
2024
-
[35]
Gienger, C
A. Gienger, C. Stein, A. P. R. Lauer, O. Sawodny, and C. Tarín. Data-Based Reachability Anal- ysis and Optimized Robot Positioning for Co-Design of Construction Processes. InIEEE/SICE Int. Symp. on System Integration (SII), pages 1247–1252, 2024
2024
-
[36]
Murooka, I
M. Murooka, I. Kumagai, M. Morisawa, and F. Kanehiro. Learning Differentiable Reachability Maps for Optimization-Based Humanoid Motion Generation. InProc. of the IEEE-RAS Int. Conf. on Humanoid Robots (Humanoids), pages 1–8, 2025
2025
-
[37]
Kim and J
S. Kim and J. Perez. Learning Reachable Manifold and Inverse Mapping for a Redundant Robot manipulator. InProc. of the IEEE Int. Conf. on Robotics and Automation (ICRA), pages 4731–4737, 2021
2021
-
[38]
X. Chen, J. Külz, and M. Althoff. Generating robot capability maps with neural fields. InProc. of Robotics: Science and Systems (RSS), 2024
2024
-
[39]
E. S. Conkur and R. Buckingham. Clarifying the definition of redundancy as used in robotics. Robotica, 15(5):583–586, 1997
1997
-
[40]
Craig.Introduction to Robotics
J. Craig.Introduction to Robotics. Pearson International, 2013
2013
-
[41]
R. Reiter. On Closed World Data Bases. In H. Gallaire and J. Minker, editors,Logic and Data Bases, pages 55–76. Springer US, 1978
1978
-
[42]
N. W. Johnson.Geometries and Transformations. Cambridge University Press, 2018
2018
-
[43]
Y . Zhou, C. Barnes, J. Lu, J. Yang, and H. Li. On the Continuity of Rotation Representations in Neural Networks. InProc. of the IEEE Conf. on Computer Vision and Pattern Recognition (CVPR), pages 5738–5746, 2019
2019
-
[44]
Hochreiter and J
S. Hochreiter and J. Schmidhuber. Long Short-Term Memory.Neural Computation, 9(8): 1735–1780, 1997
1997
-
[45]
Schuck, A
M. Schuck, A. von Rohr, and A. P. Schoellig. Scipy.spatial.transform: Differentiable Framework-Agnostic 3D Transformations in Python. InProc. of the Int. Conf. on Neural Information Processing Systems (NeurIPS), 2025
2025
-
[46]
Spearman
C. Spearman. The proof and measurement of association between two things.The American Journal of Psychology, 15(1):72–101, 1904
1904
-
[47]
N. Mantel. The detection of disease clustering and a generalized regression approach.Cancer research, 27(2):209–220, 1967
1967
-
[48]
Simonyan, A
K. Simonyan, A. Vedaldi, and A. Zisserman. Deep inside convolutional networks: Visual- ising image classification models and saliency maps. InProc. of the Int. Conf. on Learning Representations (ICLR), 2014
2014
-
[49]
Dosovitskiy and T
A. Dosovitskiy and T. Brox. Inverting visual representations with convolutional networks. In Proc. of the IEEE Conf. on Computer Vision and Pattern Recognition (CVPR), pages 4829– 4837, 2016. 12
2016
-
[50]
Mahendran and A
A. Mahendran and A. Vedaldi. Understanding deep image representations by inverting them. InProc. of the IEEE Conf. on Computer Vision and Pattern Recognition (CVPR), pages 5188– 5196, 2015
2015
- [51]
-
[52]
D. P. Kingma and J. Ba. Adam: A method for stochastic optimization. InProc. of the Int. Conf. on Learning Representations (ICLR), 2015
2015
-
[53]
D. C. Liu and J. Nocedal. On the limited memory BFGS method for large scale optimization. Mathematical Programming, 45(1):503–528, 1989
1989
-
[54]
Yoshikawa
T. Yoshikawa. Analysis and control of robot manipulators with redundancy. InProc. of the Int. Symp. on Robotics Research (ISRR), pages 735–747, 1983
1983
-
[55]
M. E. Muller. A note on a method for generating points uniformly on n-dimensional spheres. Communications of the ACM, 2(4):19–20, 1959
1959
-
[56]
Shoemake
K. Shoemake. Uniform random rotations. InGraphics Gems III, pages 124–132. Academic Press Professional, Inc., 1992
1992
-
[57]
F. C. Park. Distance Metrics on the Rigid-Body Motions with Applications to Mechanism Design.Journal of Mechanical Design, 117(1):48–54, 1995
1995
-
[58]
Žefran, V
M. Žefran, V . Kumar, and C. Croke. Choice of Riemannian Metrics for Rigid Body Kinematics. InProc. of the ASME Biennial Mechanisms Conf., 1996
1996
-
[59]
Akiba, S
T. Akiba, S. Sano, T. Yanase, T. Ohta, and M. Koyama. Optuna: A Next-generation Hyperpa- rameter Optimization Framework. InProceedings of the 25th ACM (SIGKDD) International Conference on Knowledge Discovery & Data Mining, pages 2623–2631, 2019
2019
-
[60]
R. A. Fisher. Frequency distribution of the values of the correlation coefficient in samples from an indefinitely large population.Biometrika, 10(4):507–521, 1915
1915
-
[61]
P. Jaccard. étude comparative de la distribution florale dans une portion des Alpes et des Jura. Bull Soc Vaudoise Sci Nat, 37:547–579, 1901
1901
-
[62]
L. Ruff, R. Vandermeulen, N. Goernitz, L. Deecke, S. A. Siddiqui, A. Binder, E. Müller, and M. Kloft. Deep one-class classification. InProc. of the Int. Conf. on Machine Learning (ICML), volume 80, pages 4393–4402, 2018
2018
-
[63]
Tancik, P
M. Tancik, P. P. Srinivasan, B. Mildenhall, S. Fridovich-Keil, N. Raghavan, U. Singhal, R. Ra- mamoorthi, J. T. Barron, and R. Ng. Fourier features let networks learn high frequency func- tions in low dimensional domains. InProc. of the Int. Conf. on Neural Information Processing Systems (NeurIPS), pages 7537–7547, 2020
2020
-
[64]
Saragadam, D
V . Saragadam, D. LeJeune, J. Tan, G. Balakrishnan, A. Veeraraghavan, and R. G. Baraniuk. Wire: Wavelet implicit neural representations. InProc. of the IEEE Conf. on Computer Vision and Pattern Recognition (CVPR), pages 18507–18516, 2023
2023
-
[65]
E. Jang, S. Gu, and B. Poole. Categorical reparameterization with gumbel-softmax. InProc. of the Int. Conf. on Learning Representations (ICLR), 2017. 13 A Scissor Self-collisions Scissor self-collisions arise when adjacent capsules rotate into an anti-parallel configuration through a shared joint, causing their bodies to overlap. For each jointi, letc pre...
2017
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.