Exploration of Foundation Model-Based Robots in Patient and Elderly Care
Pith reviewed 2026-06-27 15:58 UTC · model grok-4.3
The pith
Foundation model-based care robots mostly serve as voice-centered conversational aids that improve engagement but show little validated clinical impact and frequent reliability failures.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
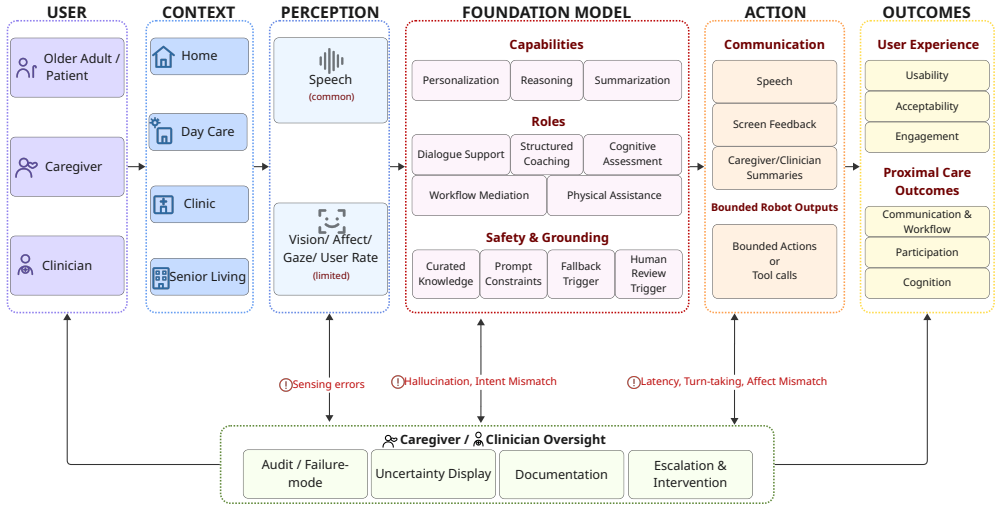
Current foundation model-based care robots most commonly use these models as conversational and reasoning layers within voice-centered socially assistive embodiments, while multimodal grounding and physical autonomy remain limited. Empirical evaluations report positive usability and engagement benefits, but reliability failures persist across the interaction pipeline such as hallucinations and conversational breakdowns. Evidence for care impact remains concentrated in proximal outcomes such as cognitive engagement and participation, with limited evidence for validated clinical or care-related changes.
What carries the argument
Synthesis across three areas (design features, user experience, and evidence for care-related outcomes) of foundation model-based care robots
If this is right
- Future systems will need to expand beyond voice-centered designs toward multimodal grounding and physical autonomy to match care needs.
- Reliability problems such as hallucinations must be reduced before accountable human oversight can be maintained in practice.
- Evaluation standards should shift from engagement metrics to validated clinical and care-related outcome measures.
- Integration into existing care workflows will be required for any responsive and responsible deployment.
- Accountable autonomy mechanisms must be developed to handle the identified reliability failures.
Where Pith is reading between the lines
- If the current concentration on proximal outcomes persists, large-scale rollout could create an evidence gap that delays regulatory acceptance in healthcare.
- Real-world deployment in varied home and institutional environments may expose workflow incompatibilities not visible in the reviewed studies.
- Bridging the gap to clinical impact will likely require explicit collaboration between robot designers and practicing care staff to define acceptable oversight protocols.
Load-bearing premise
That the reviewed body of literature on foundation model-based care robots is representative enough for the observed patterns in design, usability, and evidence gaps to apply across diverse care settings and populations.
What would settle it
A controlled study in a real care setting that measures and reports statistically significant, validated clinical improvements (for example, reduced depression scores or better daily living function) attributable to a foundation model-based robot versus standard care.
Figures
read the original abstract
Demand for older-adult and patient care is growing rapidly as populations age worldwide. Foundation models are increasingly being integrated into robots and interactive agents, with the promise of more flexible communication and personalized assistance. However, care settings require reliable and workflow-compatible systems with accountable human oversight, and it remains unclear whether current embodied systems can translate technical advances into clinical impact. This Perspective synthesizes foundation model-based care robots across three areas: design features, user experience, and evidence for care-related outcomes. Current systems most commonly use foundation models as conversational and reasoning layers within voice-centered socially assistive embodiments, while multimodal grounding and physical autonomy remain limited. Empirical evaluations report positive usability and engagement benefits, but reliability failures persist across the interaction pipeline such as hallucinations and conversational breakdowns. Evidence for care impact remains concentrated in proximal outcomes such as cognitive engagement and participation, with limited evidence for validated clinical or care-related changes. We argue that future research should transition toward care-specific evaluation standards, accountable autonomy, and integration into care workflows to support more responsive and responsible care technologies.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript is a Perspective article that synthesizes trends in foundation model-based robots for patient and elderly care. It covers design features (voice-centered socially assistive embodiments with foundation models for conversation and reasoning, limited multimodal and physical autonomy), user experience (positive usability and engagement but persistent reliability issues like hallucinations and breakdowns), and evidence for care outcomes (positive proximal effects on engagement and participation but limited evidence for validated clinical or care-related changes). The authors argue for transitioning to care-specific evaluation standards, accountable autonomy, and integration into care workflows.
Significance. If the synthesis holds, the paper is significant for highlighting the gap between technical advances in foundation models and their translation to reliable clinical impact in care settings. It provides a structured overview that could inform researchers and developers on prioritizing accountable and workflow-compatible systems. The identification of evidence concentration in proximal outcomes is a useful observation for the field.
major comments (1)
- [Abstract and synthesis sections] The synthesis claims that 'current systems most commonly use foundation models as conversational and reasoning layers within voice-centered socially assistive embodiments' and that 'Evidence for care impact remains concentrated in proximal outcomes such as cognitive engagement and participation, with limited evidence for validated clinical or care-related changes', but the manuscript provides no description of the literature selection process, search strategy, databases, inclusion/exclusion criteria, or number of studies reviewed. This is load-bearing for the central claims about patterns and evidence gaps, as it prevents assessment of whether the reviewed body is representative or subject to selection bias.
Simulated Author's Rebuttal
We thank the referee for their detailed review and constructive feedback on our Perspective article. We address the major comment below regarding the literature synthesis process.
read point-by-point responses
-
Referee: [Abstract and synthesis sections] The synthesis claims that 'current systems most commonly use foundation models as conversational and reasoning layers within voice-centered socially assistive embodiments' and that 'Evidence for care impact remains concentrated in proximal outcomes such as cognitive engagement and participation, with limited evidence for validated clinical or care-related changes', but the manuscript provides no description of the literature selection process, search strategy, databases, inclusion/exclusion criteria, or number of studies reviewed. This is load-bearing for the central claims about patterns and evidence gaps, as it prevents assessment of whether the reviewed body is representative or subject to selection bias.
Authors: We agree that the absence of an explicit description of the literature selection process limits transparency for a Perspective that makes claims about prevailing patterns and evidence gaps. As a Perspective article, the synthesis draws on the authors' expertise and a narrative review of recent work rather than a formal systematic review protocol. To address this, we will add a dedicated subsection (e.g., 'Scope of the Reviewed Literature') that outlines the primary sources consulted (including key conferences, journals, and arXiv preprints from 2022–2024), approximate number of systems and studies considered, and the main inclusion considerations used to identify representative examples. This addition will allow readers to better evaluate the basis for the reported trends without converting the paper into a systematic review. revision: yes
Circularity Check
No circularity: qualitative synthesis without derivations or self-referential modeling
full rationale
The paper is a perspective literature synthesis on foundation model-based care robots. It contains no equations, fitted parameters, predictions, ansatzes, or uniqueness theorems. Central claims about design patterns, usability, and evidence gaps are interpretive summaries drawn from external reviewed works rather than reductions to the paper's own inputs by construction. No self-citation chains or renamings of known results appear as load-bearing steps. This is the expected non-finding for a non-modeling qualitative review.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
2.Grinin, L., Grinin, A
Amuthavalli Thiyagarajan, J.et al.The un decade of healthy ageing: strengthening measurement for monitoring health and wellbeing of older people.Age ageing51, afac147 (2022). 2.Grinin, L., Grinin, A. & Korotayev, A. Global aging and our futures.World Futur.79, 536–556 (2023). 3.Gutterman, A. S. Caregiving and families.Available at SSRN 4610245(2023)
2022
-
[2]
Ahn, M.et al.Do as i can, not as i say: Grounding language in robotic affordances.arXiv preprint arXiv:2204.01691 (2022)
work page internal anchor Pith review Pith/arXiv arXiv 2022
-
[3]
InConference on Robot Learning, 2165–2183 (PMLR, 2023)
Zitkovich, B.et al.Rt-2: Vision-language-action models transfer web knowledge to robotic control. InConference on Robot Learning, 2165–2183 (PMLR, 2023)
2023
-
[4]
Hao, Y ., Liu, Z., Riter, R. N. & Kalantari, S. Advancing patient-centered shared decision-making with ai systems for older adult cancer patients. InProceedings of the 2024 CHI Conference on Human Factors in Computing Systems, 1–20 (2024). 7.Xiao, X.et al.Robot learning in the era of foundation models: A survey.Neurocomputing129963 (2025)
2024
-
[5]
Hao, Y .et al.Personalizing prostate cancer education for patients using an ehr-integrated llm agent.NPJ Digit. Medicine 8, 770 (2025). 9.Achiam, J.et al.Gpt-4 technical report.arXiv preprint arXiv:2303.08774(2023)
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[6]
Zhang, J., Huang, J., Jin, S. & Lu, S. Vision-language models for vision tasks: A survey.IEEE transactions on pattern analysis machine intelligence46, 5625–5644 (2024)
2024
-
[7]
journal medical research14, e59823 (2025)
Roustan, D., Bastardot, F.et al.The clinicians’ guide to large language models: A general perspective with a focus on hallucinations.Interact. journal medical research14, e59823 (2025)
2025
-
[8]
& Skantze, G
Irfan, B., Kuoppamäki, S., Hosseini, A. & Skantze, G. Between reality and delusion: challenges of applying large language models to companion robots for open-domain dialogues with older adults.Auton. Robots49, 9 (2025)
2025
-
[9]
ACM Transactions on Inf
Huang, L.et al.A survey on hallucination in large language models: Principles, taxonomy, challenges, and open questions. ACM Transactions on Inf. Syst.43, 1–55 (2025). 7/9
2025
-
[10]
InCompanion of the 2023 ACM/IEEE international conference on human-robot interaction, 178–182 (2023)
Khoo, W.et al.Spill the tea: When robot conversation agents support well-being for older adults. InCompanion of the 2023 ACM/IEEE international conference on human-robot interaction, 178–182 (2023)
2023
-
[11]
& Skantze, G
Irfan, B., Kuoppamäki, S. & Skantze, G. Recommendations for designing conversational companion robots with older adults through foundation models.Front. Robotics AI11, 1363713 (2024)
2024
-
[12]
& Belpaeme, T
Pinto-Bernal, M., Biondina, M. & Belpaeme, T. Designing social robots with llms for engaging human interaction.Appl. Sci.15, 6377 (2025)
2025
-
[13]
& Gunes, H
Spitale, M., Axelsson, M. & Gunes, H. Vita: A multi-modal llm-based system for longitudinal, autonomous and adaptive robotic mental well-being coaching.ACM Transactions on Human-Robot Interact.14, 1–28 (2025)
2025
-
[14]
Browne, R.et al.Reflective dialogues with a humanoid robot integrated with an llm and a curated nlu system for positive behavioral change in older adults.Electronics13, 4364 (2024)
2024
-
[15]
& Sugano, S
Miyake, T., Wang, Y ., Yang, P.-c. & Sugano, S. Feasibility study on parameter adjustment for a humanoid using llm tailoring physical care. InInternational Conference on Social Robotics, 230–243 (Springer, 2023)
2023
-
[16]
& Núñez, P
Blanco, A., Pérez, G., Condón, A., Rodríguez, T. & Núñez, P. AI-enhanced social robots for older adults care: Evaluating the efficacy of ChatGPT-powered storytelling in the EBO platform. In2024 33rd IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), 2109–2115 (IEEE, 2024)
2024
-
[17]
& Kawamura, M
Numao, M. & Kawamura, M. An interactive monitoring robot for dementia mitigation via daily conversations with multiple llms. InProceedings of the AAAI Symposium Series, vol. 5, 250–255 (2025)
2025
-
[18]
R.et al.Promoting cognitive health in elder care with large language model-powered socially assistive robots
Lima, M. R.et al.Promoting cognitive health in elder care with large language model-powered socially assistive robots. In Proceedings of the 2025 CHI Conference on Human Factors in Computing Systems, 1–22 (2025)
2025
-
[19]
Yang, Z.et al.Talk2care: An llm-based voice assistant for communication between healthcare providers and older adults. Proc. ACM on Interactive, Mobile, Wearable Ubiquitous Technol.8, 1–35 (2024)
2024
-
[20]
Kang, H., Moussa, M. B. & Magnenat-Thalmann, N. Nadine: an llm-driven intelligent social robot with affective capabilities and human-like memory.arXiv preprint arXiv:2405.20189(2024). 25.Padmanabha, A.et al.V oicepilot: Harnessing llms as speech interfaces for physically assistive robots. InProceedings of the 37th Annual ACM Symposium on User Interface So...
-
[21]
Sci.14, 9922 (2024)
Kim, K.et al.Framework for integrating large language models with a robotic health attendant for adaptive task execution in patient care.Appl. Sci.14, 9922 (2024)
2024
-
[22]
Pandey, A. K. & Gelin, R. A mass-produced sociable humanoid robot: Pepper: The first machine of its kind.IEEE Robotics & Autom. Mag.25, 40–48 (2018)
2018
-
[23]
In2011 IEEE international conference on Control System, Computing and Engineering, 511–516 (IEEE, 2011)
Shamsuddin, S.et al.Humanoid robot nao: Review of control and motion exploration. In2011 IEEE international conference on Control System, Computing and Engineering, 511–516 (IEEE, 2011)
2011
-
[24]
& Thalmann, N
Ramanathan, M., Mishra, N. & Thalmann, N. M. Nadine humanoid social robotics platform. InComputer Graphics International Conference, 490–496 (Springer, 2019)
2019
-
[25]
Factors12, e76496 (2025)
Blavette, L.et al.Acceptability and usability of a socially assistive robot integrated with a large language model for enhanced human-robot interaction in a geriatric care institution: mixed methods evaluation.JMIR Hum. Factors12, e76496 (2025)
2025
-
[26]
Logeshwar, A., Manikandan, R., Parvesh, R., Solaiappan, A. R. & Anju, L. Smart home robotic companion with ai-driven personalized care for elderly assistance. InThe 2025 International Conference on Advanced Research in Electronics and Communication Systems (ICARECS-2025), 322–332 (Atlantis Press, 2025)
2025
-
[27]
& Núñez, P
Blanco, A., Condón, A., Clavijo, Z., Rodríguez, T. & Núñez, P. Ebo robot in elderly care: Interaction styles and multimodal engagement through serious games in care centers. InInternational Conference on Social Robotics, 79–91 (Springer, 2025)
2025
-
[28]
Anonymous. NarraGuide: an LLM-based narrative mobile robot for remote place exploration. InProceedings of the 38th Annual ACM Symposium on User Interface Software and Technology (UIST), DOI: 10.1145/3746059.3747697 (2025). Authors to be verified from PDF. 34.Vinay, R., Uetova, E., Tommila, N. C., Biller-Andorno, N. & Kowatsch, T. Grace, a hybrid rule-and ...
-
[29]
& Parra, M
Favela, J., Cruz-Sandoval, D. & Parra, M. O. Conversational agents for dementia using large language models. In2023 Mexican International Conference on Computer Science (ENC), 1–7 (IEEE, 2023)
2023
-
[30]
R., Srinivasan, N., Daniels, S., Vaitheswaran, S
Lima, M. R., Srinivasan, N., Daniels, S., Vaitheswaran, S. & Vaidyanathan, R. Cultural feasibility of conversational robots for dementia care in india: Participatory design study.J. Particip. Medicine17, e80457 (2025)
2025
-
[31]
van ’t Klooster, J.-W. J. R.et al.A GPT-reinforced social robot for patient communication: a pilot study.Front. Digit. Heal.7, 1653168 (2026)
2026
-
[32]
InInternational Conference on Social Robotics, 16–29 (Springer, 2025)
Huseynzade, S.et al.When robots care: Elderly reactions to emotionally intelligent android. InInternational Conference on Social Robotics, 16–29 (Springer, 2025)
2025
-
[33]
InProceedings of the 2025 CHI Conference on Human Factors in Computing Systems, 1–22 (2025)
Sun, J.et al.Chorus of the past: Toward designing a multi-agent conversational reminiscence system with digital artifacts for older adults. InProceedings of the 2025 CHI Conference on Human Factors in Computing Systems, 1–22 (2025)
2025
-
[34]
B., Plaat, A
Bossema, M., Allouch, S. B., Plaat, A. & Saunders, R. Llm-enhanced interactions in human-robot collaborative drawing with older adults. In2025 34th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), 700–707 (IEEE, 2025)
2025
-
[35]
A., Marco-Detchart, C
Rincon Arango, J. A., Marco-Detchart, C. & Julian Inglada, V . J. Personalized cognitive support via social robots.Sensors 25, 888 (2025)
2025
-
[36]
& Akinci, T
Topsakal, O. & Akinci, T. C. Creating large language model applications utilizing langchain: A primer on developing llm apps fast. InInternational conference on applied engineering and natural sciences, vol. 1, 1050–1056 (2023)
2023
-
[37]
Factors12, e81936 (2025)
Blavette, L.et al.Integrating a large language model into a socially assistive robot in a hospital geriatric unit: Two-wave comparative study on performance, engagement, and user perceptions.JMIR Hum. Factors12, e81936 (2025). 44.Lewis, J. R. The system usability scale: past, present, and future.Int. J. Human–Computer Interact.34, 577–590 (2018)
2025
- [38]
-
[39]
& Kurazume, R
Miyawaki, T., Nishiura, Y ., Fukuda, R., Nakashima, K. & Kurazume, R. Development of dementia care training system using ar and large language model. In2024 IEEE International Conference on Systems, Man, and Cybernetics (SMC), 903–908 (IEEE, 2024). 47.Mehandru, N.et al.Evaluating large language models as agents in the clinic.NPJ digital medicine7, 84 (2024). 9/9
2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.