Dynamic inverse problems: Single-loop online algorithms
Pith reviewed 2026-06-27 12:20 UTC · model grok-4.3
The pith
Single-loop approximate gradients with summable errors enable standard online optimization for dynamic PDE inverse problems
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
We replace the gradient by a single-loop estimate ilde{ abla} E_k(x^k) that satisfies standard smoothness properties with summable errors. This allows standard regret proofs to go through for online methods applied to dynamic inverse problems with PDE forward models.
What carries the argument
The single-loop estimate ilde{ abla} E_k(x^k) produced by one or few steps of the PDE and adjoint solvers, which preserves the smoothness needed for regret analysis while incurring only summable errors.
If this is right
- Standard regret bounds from online optimization apply directly despite the inexact gradients.
- The algorithm processes an infinite stream of data frames without requiring full PDE solves at any step.
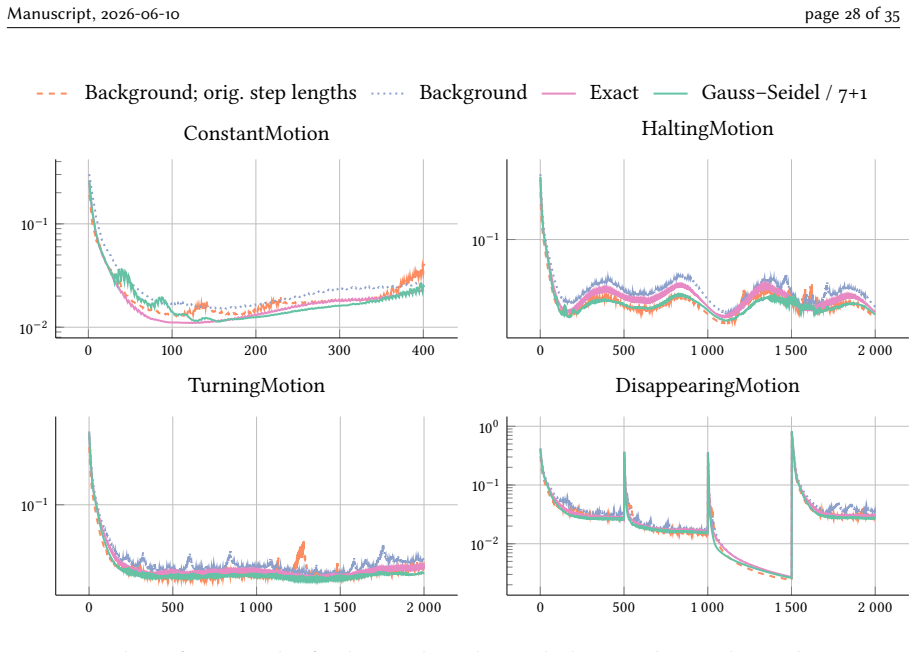
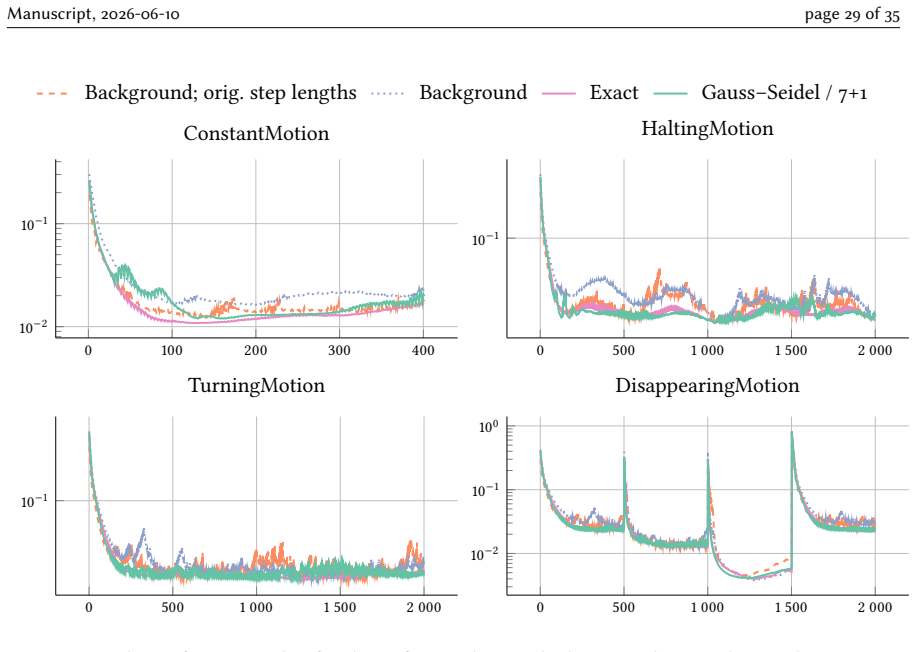
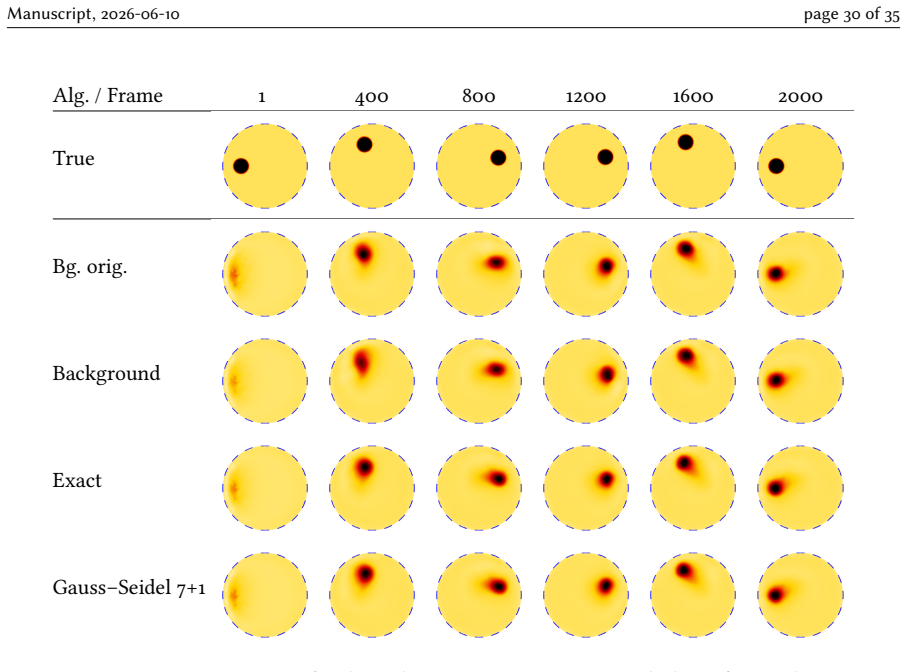
- Numerical tests on dynamic EIT confirm that the method matches the theoretical performance predictions.
- The approach supports real-time reconstruction for any PDE-constrained dynamic inverse problem where full forward solves are too slow.
Where Pith is reading between the lines
- If the dynamics predictor that transfers iterates between time steps is made more accurate, the number of inner solver steps per iteration could be reduced further.
- The same single-loop construction may extend to other streaming inverse problems whose forward operators are expensive to evaluate exactly.
- Long-horizon numerical tests beyond the reported EIT experiments could expose whether summability holds in practice under realistic noise levels.
Load-bearing premise
The errors introduced by taking only single or few steps of the PDE and adjoint solvers must remain summable over the entire infinite sequence of time indices.
What would settle it
A concrete numerical run on a dynamic EIT sequence in which the summed gradient errors diverge with time and the observed regret grows faster than the predicted bound.
Figures

read the original abstract
We study efficient online methods for dynamic inverse problems with infinite time horizon. We concentrate, in particular, on problems whose forward model arises from a PDE. Our motivating application is flow monitoring with Electrical Impedance Tomography (EIT). The idea of such online methods is to take single steps of of standard optimisation algorithms, on each time index; each data frame. A predictor, based on problem dynamics, is used to transfer iterates one from time index to the next one. If we monitor a fast flow with a correspondingly fast measurement modality, such as EIT, basic methods are unable to solve the PDE before new data arrives. Our idea, then, is to not solve it, and instead, on each iteration, each time index, take single or few steps of standard iterative solvers towards the solution of both the PDE and an adjoint PDE. This is what ``single loop'' refers to. To the overall problem, we apply standard online optimisation methods, at the outside developed for exact gradients $\nabla E_k(x^k)$ of the iteration-dependent data fidelity $E_k$ that incorporates the PDE. We replace the gradient by a single-loop estimate $\tilde\grad E_k(x^k)$ that satisfies standard smoothness properties with summable errors. This allows standard regret proofs to go through. Our numerical experiments on dynamic EIT validate the theoretical predictions and highlight the potential of the proposed approach for the real-time solution of PDE-constrained dynamic inverse problems.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes single-loop online optimization algorithms for infinite-horizon dynamic inverse problems with PDE forward models, motivated by real-time flow monitoring via Electrical Impedance Tomography (EIT). A dynamics-based predictor advances iterates between time indices while only a fixed number of inner PDE and adjoint solver steps are performed per time index; the resulting approximate gradients ilde{ abla} E_k(x^k) are asserted to retain standard smoothness while incurring summable errors e_k, so that existing regret bounds for online methods with exact gradients carry over directly. Numerical experiments on synthetic dynamic EIT data are presented to illustrate performance.
Significance. If the summability claim holds, the approach would provide a computationally tractable route to real-time PDE-constrained inversion when full forward/adjoint solves per frame are infeasible, extending online convex optimization tools to a practically relevant class of dynamic inverse problems.
major comments (2)
- [Abstract and §4] Abstract and §4 (error analysis): the central claim that the single-loop estimates satisfy || ilde{ abla} E_k(x^k) - abla E_k(x^k)|| = e_k with \sum e_k < \infty is asserted without a uniform contraction rate for the inner solvers that is independent of the current state x^k and the predictor error; the argument therefore does not establish that the per-step residuals remain summable over the infinite horizon when the flow speed or PDE Lipschitz constants vary.
- [Theorem 1] Theorem 1 (regret bound): the reduction to standard online regret proofs is invoked once summability is granted, yet no explicit verification is supplied that the smoothness constant of ilde{ abla} E_k remains bounded independently of k under the single-loop truncation; this step is load-bearing for the claimed regret guarantee.
minor comments (2)
- [§2] Notation for the predictor step and the precise number of inner iterations should be introduced with an equation number rather than inline text.
- [Figure 3] Figure 3 caption does not state the precise tolerance or iteration count used for the single-loop PDE solves.
Simulated Author's Rebuttal
We thank the referee for the careful reading and the identification of points requiring clarification in the error analysis and regret bound. We address each major comment below and will revise the manuscript accordingly.
read point-by-point responses
-
Referee: [Abstract and §4] Abstract and §4 (error analysis): the central claim that the single-loop estimates satisfy ||tilde{grad} E_k(x^k) - grad E_k(x^k)|| = e_k with sum e_k < infty is asserted without a uniform contraction rate for the inner solvers that is independent of the current state x^k and the predictor error; the argument therefore does not establish that the per-step residuals remain summable over the infinite horizon when the flow speed or PDE Lipschitz constants vary.
Authors: We agree that the current argument in §4 relies on per-step contraction without explicitly proving uniformity independent of x^k and predictor error across varying flow speeds or Lipschitz constants. The manuscript assumes the inner solvers admit a contraction factor sufficient for summability under the problem dynamics, but does not derive a uniform rate. We will revise §4 to add an explicit assumption on uniform contraction (or a lemma establishing it from the PDE Lipschitz bounds and bounded predictor error) and verify summability holds over the infinite horizon. revision: yes
-
Referee: [Theorem 1] Theorem 1 (regret bound): the reduction to standard online regret proofs is invoked once summability is granted, yet no explicit verification is supplied that the smoothness constant of tilde{grad} E_k remains bounded independently of k under the single-loop truncation; this step is load-bearing for the claimed regret guarantee.
Authors: The manuscript states that the single-loop estimate inherits standard smoothness with an additive summable perturbation, allowing direct application of existing regret proofs. However, we acknowledge that an explicit verification that the smoothness modulus of tilde{grad} E_k stays bounded independently of k (under fixed inner iterations) is not supplied. We will add a short lemma in the revision confirming that the smoothness constant remains uniformly bounded, using the fact that the truncation depth is fixed and the exact gradient is assumed smooth with uniform constants. revision: yes
Circularity Check
No circularity; central claim relies on external standard regret bounds once error summability is granted
full rationale
The derivation chain in the abstract replaces exact gradients with single-loop estimates that are asserted to satisfy smoothness and summable-error conditions, allowing standard online optimization regret proofs to apply directly. No self-definitional reduction, fitted-input-as-prediction, or load-bearing self-citation is present in the provided text. The summability claim is an assumption whose verification is external to the regret step itself; the paper does not rename or smuggle its own inputs as outputs. This is the normal case of a self-contained reduction to known results.
Axiom & Free-Parameter Ledger
Forward citations
Cited by 1 Pith paper
-
Single-loop approaches to nonsmooth bilevel optimisation
Develops optimistic and pessimistic calculus rules for set-valued bilevel constraints, derives nonsmooth adjoint inclusions, and proposes a convergent single-loop algorithm demonstrated on total variation inverse problems.
Reference graph
Works this paper leans on
-
[1]
M. Alsaker, J. L. Mueller, and A. Stahel, A multithreaded real-time solution for 2D EIT recon- struction with the D-bar algorithm,Journal of Computational Science67 (2023), 101967,doi: 10.1016/j.jocs.2023.101967
-
[2]
C. Clason and T. Valkonen,Introduction to Nonsmooth Analysis and Optimization, MOS-SIAM Series on Optimization, SIAM, 2026,doi:10.1137/1.9781611978995
-
[3]
N. D. Dizon, J. Jauhiainen, and T. Valkonen, Prediction Techniques for Dynamic Imaging with Online Primal–Dual Methods,Journal of Mathematical Imaging and Vision66 (2024), 1109–1134
2024
-
[4]
N. Dizon, J. Jauhiainen, and T. Valkonen, Prediction techniques for dynamic imaging with online primal-dual methods, 2024,doi:10.1007/s10851-024-01214-w,arXiv:2405.02497
-
[5]
Online optimisation for dynamic electrical impedance tomography
N. Dizon, J. Jauhiainen, and T. Valkonen, Online optimisation for dynamic electrical impedance tomography, 2025,doi:10.1088/1361-6420/adcb66,arXiv:2412.12944
work page internal anchor Pith review Pith/arXiv arXiv doi:10.1088/1361-6420/adcb66 2025
-
[6]
N. Dizon and T. Valkonen, Differential estimates for fast first-order multilevel nonconvex optimi- sation, 2024,arXiv:2412.01481. submitted
-
[7]
G. H. Golub and C. F. Van Loan, Matrix computations. Johns Hopkins studies in the mathematical sciences, 1996
1996
-
[8]
Gradshteyn and I
I. Gradshteyn and I. Ryzhik,Table of integrals, series, and products, Academic press, 2014
2014
-
[9]
Hall and R
E. Hall and R. Willett, Dynamical models and tracking regret in online convex programming, inProceedings of the 30th International Conference on Machine Learning, S. Dasgupta and D. McAllester (eds.), volume 28 of Proceedings of Machine Learning Research, PMLR, Atlanta, Georgia, USA, 2013, 579–587,http://proceedings.mlr.press/v28/hall13.html
2013
-
[10]
Hinze, R
M. Hinze, R. Pinnau, M. Ulbrich, and S. Ulbrich,Optimization with PDE Constraints, number 23 in Mathematical Modelling: Theory and Applications, Springer Netherlands, 2009,doi:10.1007/ 978-1-4020-8839-1. J. Jauhiainen, Y. Nabou, T. Valkonen Dynamic inverse problems: Single-loop online algorithms Manuscript, 2026-06-10 page 35 of 35
2009
-
[11]
Holder and K
D. Holder and K. Aristovich, Electrical impedance tomography, inThe Physics of Medical Imaging, CRC press, 2026, 381–391
2026
-
[12]
D. J. Holland, D. M. Malioutov, A. Blake, A. J. Sederman, and L. F. Gladden, Reducing data acqui- sition times in phase-encoded velocity imaging u sing compressed sensing,Journal of Magnetic Resonance203 (2010), 236–46
2010
-
[13]
A. Hunt, Weighing without touching: applying electrical capacitance tomography to mass flowrate measurement in multiphase flows,Measurement and Control47 (2014), 19–25,doi: 10.1177/0020294013517445
-
[14]
J. Jauhiainen, N. Dizon, T. Valkonen, and Y. Nabou, Online optimisation codes for dynamic elec- trical impedance tomography, 2026,doi:10.5281/zenodo.19154746. Software
-
[15]
Jauhiainen, P
J. Jauhiainen, P. Kuusela, A. Seppanen, and T. Valkonen, Relaxed Gauss–Newton methods with applications to electrical impedance tomography,SIAM Journal on Imaging Sciences13 (2020), 1415–1445
2020
-
[16]
Jauhiainen, P
J. Jauhiainen, P. Kuusela, A. Seppänen, and T. Valkonen, Relaxed Gauss–Newton Methods with Applications to Electrical Impedance Tomography,SIAM Journal on Imaging Sciences13 (2020), 1415–1445
2020
-
[17]
Dynamic inverse problems: Online regularisation theory
J. Jauhiainen, Y. Nabou, and T. Valkonen, Dynamic inverse problems: Online regularisation theory, 2026,arXiv:2605.26022. submitted
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[18]
Jauhiainen, M
J. Jauhiainen, M. Pour-Ghaz, T. Valkonen, and A. Seppänen, Nonplanar sensing skins for struc- tural health monitoring based on electrical resistance tomography,Computer-Aided Civil and Infrastructure Engineering36 (2021), 1488–1507
2021
-
[19]
B. Jensen and T. Valkonen, A nonsmooth primal-dual method with interwoven PDE con- straint solver,Computational Optimization and Applications89 (2024), 115–149,doi:10.1007/ s10589-024-00587-3,arXiv:2211.04807
-
[20]
J. P. Kaipio, V. Kolehmainen, E. Somersalo, and M. Vauhkonen, Statistical inversion and Monte Carlo sampling methods in electrical impedance tomography,Inverse Problems16 (2000), 1487
2000
-
[21]
A. Lipponen, A. Seppänen, and J. P. Kaipio, Nonstationary approximation error approach to imag- ing of three-dimensional pipe flow: experimental evaluation,Measurement Science and Technology 22 (2011), 104013,doi:10.1088/0957-0233/22/10/104013
-
[22]
T. Schuster, B. Hahn, and M. Burger, Dynamic inverse problems: mod- elling—regularization—numerics,Inverse Problems34 (2018), 040301,doi:10.1088/1361-6420/aab0f5. Preface to special issue
-
[23]
E. Suonperä and T. Valkonen, General single-loop methods for bilevel parameter learning, 2024, arXiv:2408.08123. submitted
-
[24]
A. Voss, N. Hänninen, M. Pour-Ghaz, M. Vauhkonen, and A. Seppänen, Imaging of two- dimensional unsaturated moisture flows in uncracked and cracked cement-based materials using electrical capacitance tomography,Materials and Structures51 (2018), 68
2018
-
[25]
A. Voss, P. Hosseini, M. Pour-Ghaz, M. Vauhkonen, and A. Seppänen, Three-dimensional electri- cal capacitance tomography–A tool for characterizing moisture transport properties of cement- based materials,Materials & Design181 (2019), 107967. J. Jauhiainen, Y. Nabou, T. Valkonen Dynamic inverse problems: Single-loop online algorithms
2019
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.