Generation of Diverse and Functional Robot Designs using Superquadrics Parametrisation and Quality-Diversity
Pith reviewed 2026-06-27 13:08 UTC · model grok-4.3
The pith
Superquadrics parametrization combined with MAP-Elites produces the highest diversity and functionality scores for generated robot designs across two test environments.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
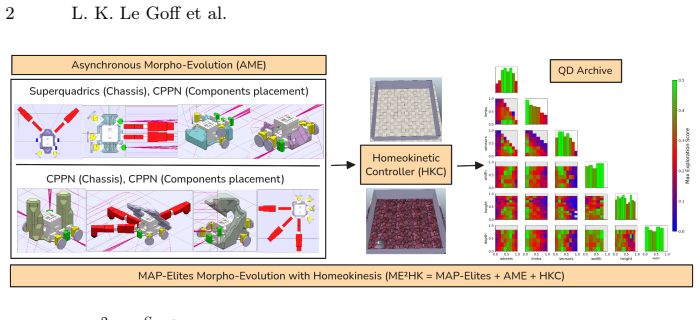
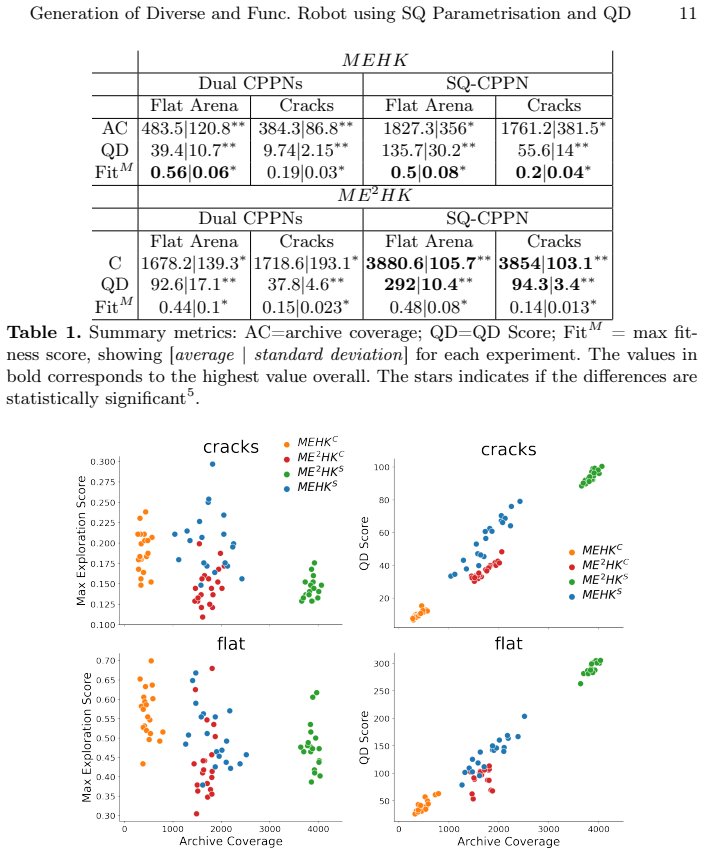
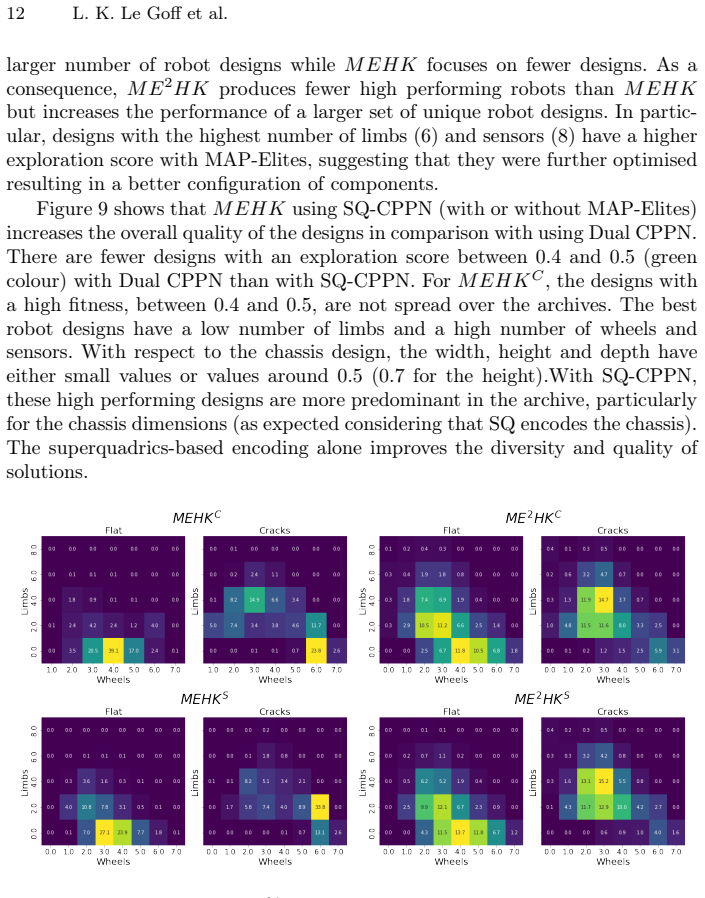
Superquadrics offer an interpretable and compact way to encode robot body geometry. When this representation is used to generate morphologies inside the MAP-Elites algorithm, the resulting collection of robots achieves the highest QD-score in both test environments, indicating greater coverage of distinct high-performing designs than is obtained with compositional pattern producing networks or with standard evolutionary algorithms.
What carries the argument
Superquadrics parametrization, a small set of mathematical parameters that define families of 3D shapes, used as the morphology generator inside the MAP-Elites quality-diversity algorithm.
If this is right
- Designers obtain a larger set of distinct, functional robot bodies from a single run rather than repeated independent searches.
- The compact parameter count of superquadrics reduces the dimensionality that the search algorithm must explore compared with network-based generators.
- Explicit diversity maintenance becomes more effective when the underlying shape representation already constrains the space to geometrically meaningful variations.
- Interpretable parameters make it easier for a human to understand or manually adjust the generated morphologies after the algorithm finishes.
Where Pith is reading between the lines
- The same pairing could be tested on tasks that require multiple coordinated robots rather than single agents.
- Because superquadrics are defined by continuous parameters, small mutations produce smooth shape changes that may preserve functionality better than discrete structural edits.
- If fabrication constraints such as minimum feature size were added to the evaluation, the advantage of the compact representation might increase or decrease depending on how those constraints interact with the parameter bounds.
Load-bearing premise
The two chosen test environments and their fitness functions are representative enough of real robot design problems that performance differences observed there will hold outside the simulation.
What would settle it
Running the same four combinations on a third environment whose locomotion or manipulation demands differ markedly from the original two, and finding that superquadrics plus MAP-Elites no longer records the highest QD-score.
Figures
read the original abstract
Generative design of robots requires navigating a vast search-space, encompassing physical configurations and behavioural parameters. Evolutionary Algorithms (EAs) have shown promising results, but often converge prematurely to a small set of sub-optimal designs. Most EAs fail to maintain sufficient diversity in the population that would allow the discovery of distinct functional robots. To counter premature convergence, we introduce a superquadrics-based representation (SQs) for robot bodies. SQs are interpretable, compact and computationally efficient mathematical representations of 3D geometrical shapes that can be tuned to specific design-spaces. To encourage morphological diversity, we combine this representation with a quality-diversity (QD) algorithm (MAP-Elites). We compare SQs and Compositional Pattern Producing Networks representations as generators of morphologies, combining them with standard EAs and MAP-Elites. In two test environments, we find that using SQs to generate morphology in conjunction with the MAP-Elites algorithm reaches the highest QD-score across both environments, maximising diversity of design and functionality of generated robots. The findings highlight the benefits of using a compact and interpretable geometric representation for exploring a complex design-space and suggest that combining SQs with an explicit diversity mechanism increases the quality and number of designs generated.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a superquadrics (SQs) parametrization for generating robot morphologies, combined with the MAP-Elites quality-diversity algorithm, to produce diverse and functional robot designs. It compares SQs against Compositional Pattern Producing Networks (CPPNs) as morphology generators, paired with both standard evolutionary algorithms and MAP-Elites, and reports that SQs + MAP-Elites achieves the highest QD-score across two test environments, thereby maximizing design diversity and functionality.
Significance. If the experimental comparisons hold under scrutiny, the work demonstrates that compact, interpretable geometric representations can improve exploration of robot design spaces when paired with explicit diversity mechanisms, offering a practical alternative to more complex generators like CPPNs for evolutionary robotics applications.
major comments (2)
- [Abstract and §4 (Experiments)] The headline result (highest QD-score for SQs + MAP-Elites) is load-bearing on the representativeness of the two test environments, their physics simulators, behavior descriptors, fitness functions, and MAP-Elites grid configuration; none of these are described in the abstract or methods overview, preventing assessment of whether the reported advantage is an artifact of the chosen testbed rather than a general property of the representation.
- [§3 (Methodology)] The comparison between SQs and CPPNs does not report the specific parameter counts, mutation operators, or initialization procedures used for each generator; without these details it is impossible to determine whether the performance difference arises from the representation itself or from unequal search-space dimensionality or operator bias.
minor comments (2)
- [Abstract] The abstract states that SQs are 'tuned to specific design-spaces' but provides no concrete bounds or constraints on the superquadric parameters; a short table or paragraph listing the ranges would improve reproducibility.
- [§5 (Results)] Figure captions and axis labels in the results section should explicitly state the number of independent runs and whether error bars represent standard deviation or standard error.
Simulated Author's Rebuttal
We thank the referee for the constructive comments. We address each major point below and will incorporate revisions to improve clarity and transparency.
read point-by-point responses
-
Referee: [Abstract and §4 (Experiments)] The headline result (highest QD-score for SQs + MAP-Elites) is load-bearing on the representativeness of the two test environments, their physics simulators, behavior descriptors, fitness functions, and MAP-Elites grid configuration; none of these are described in the abstract or methods overview, preventing assessment of whether the reported advantage is an artifact of the chosen testbed rather than a general property of the representation.
Authors: We agree that the abstract and methods overview should provide enough context on the experimental setup for readers to evaluate generalizability. While full details appear in §4, we will revise the abstract to briefly note the two environments and add a summary paragraph in the methods overview covering the simulators, behavior descriptors, fitness functions, and MAP-Elites grid. This will help address concerns about testbed specificity. revision: yes
-
Referee: [§3 (Methodology)] The comparison between SQs and CPPNs does not report the specific parameter counts, mutation operators, or initialization procedures used for each generator; without these details it is impossible to determine whether the performance difference arises from the representation itself or from unequal search-space dimensionality or operator bias.
Authors: We acknowledge that these implementation details are not explicitly stated in §3. To enable assessment of whether differences arise from the representations or from search-space or operator disparities, we will expand §3 with the parameter counts for SQs and CPPNs, the mutation operators and rates applied to each, and the initialization procedures. revision: yes
Circularity Check
No circularity: empirical comparison of representations with no derivation or fitted-parameter reuse
full rationale
The paper reports an experimental comparison of superquadrics versus CPPN morphology generators, each paired with standard EAs and MAP-Elites, evaluated by QD-score in two test environments. No equations, parameter-fitting procedures, or predictive claims appear; the headline result is a direct empirical measurement of diversity and performance. No self-citation is invoked to justify a uniqueness theorem or ansatz, and no step reduces a reported outcome to its own inputs by construction. The work is therefore self-contained against external benchmarks and receives the default non-circularity finding.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Frontiers in Robotics and AI10(2023)
Angus, M., Buchanan, E., Le Goff, L.K., Hart, E., Eiben, A.E., De Carlo, M., Winfield, A.F., Hale, M.F., Woolley, R., Timmis, J., et al.: Practical hardware for evolvable robots. Frontiers in Robotics and AI10(2023)
2023
-
[2]
In: Proceedings of the 13th Annual Conference on Genetic and Evolutionary Computation
Auerbach, J.E., Bongard, J.C.: Evolving complete robots with cppn-neat: the util- ity of recurrent connections. In: Proceedings of the 13th Annual Conference on Genetic and Evolutionary Computation. p. 1475–1482. GECCO ’11, Association for Computing Machinery, New York, NY, USA (2011).https://doi.org/10. 1145/2001576.2001775,https://doi.org/10.1145/200157...
-
[3]
Robotics9(4), 106 (2020)
Buchanan, E., Le Goff, L.K., Li, W., Hart, E., Eiben, A.E., De Carlo, M., Winfield, A.F., Hale, M.F., Woolley, R., Angus, M., et al.: Bootstrapping artificial evolution to design robots for autonomous fabrication. Robotics9(4), 106 (2020)
2020
-
[4]
Journal of The Royal Society In- terface15(143), 20170937 (2018)
Cheney, N., Bongard, J., SunSpiral, V., Lipson, H.: Scalable co-optimization of morphology and control in embodied machines. Journal of The Royal Society In- terface15(143), 20170937 (2018)
2018
-
[5]
ACM SIGEVOlution7(1), 11–23 (2014)
Cheney, N., MacCurdy, R., Clune, J., Lipson, H.: Unshackling evolution: evolv- ing soft robots with multiple materials and a powerful generative encoding. ACM SIGEVOlution7(1), 11–23 (2014)
2014
-
[6]
In: Proceedings of the 2020 Genetic and Evolutionary Computation Conference
Colas, C., Madhavan, V., Huizinga, J., Clune, J.: Scaling map-elites to deep neu- roevolution. In: Proceedings of the 2020 Genetic and Evolutionary Computation Conference. pp. 67–75 (2020)
2020
-
[7]
In: Proceedings of the Genetic and Evolution- ary Computation Conference
Cully, A.: Multi-emitter map-elites: improving quality, diversity and data efficiency with heterogeneous sets of emitters. In: Proceedings of the Genetic and Evolution- ary Computation Conference. pp. 84–92 (2021)
2021
-
[8]
VDI BERICHTE1679, 301–308 (2002)
Der, R., Herrmann, J., Liebscher, R.: Homeokinetic approach to autonomous learn- ing in mobile robots. VDI BERICHTE1679, 301–308 (2002)
2002
-
[9]
Der, R., Martius, G.: The playful machine: theoretical foundation and practical realization of self-organizing robots, vol. 15. Springer Science & Business Media (2012)
2012
-
[10]
Dupac, M.: An object-oriented approach for mechanical components design and visualization. Eng. with Comput.28(2), 95–107 (Apr 2012)
2012
-
[11]
Goff, L.K.L., Smith, S.C.: Efficient and diverse generative robot designs using evolution and intrinsic motivation. In: 2025 IEEE International Conference on Robotics and Automation (ICRA). pp. 16598–16605 (2025).https://doi.org/ 10.1109/ICRA55743.2025.11127289
-
[12]
Nature communications12(1), 5721 (2021)
Gupta, A., Savarese, S., Ganguli, S., Fei-Fei, L.: Embodied intelligence via learning and evolution. Nature communications12(1), 5721 (2021)
2021
-
[13]
Journal of Intelligent & Robotic Systems109(2), 29 (2023)
Han, X., Yang, L.: Sq-slam: Monocular semantic slam based on superquadric object representation. Journal of Intelligent & Robotic Systems109(2), 29 (2023)
2023
-
[14]
Georg-August-Universitaet Goettingen (Germany) (2009)
Hesse, F.: Self-Organizing Control for Autonomous Robots A Dynamical Systems Approach Based on the Principle of Homeokinesis. Georg-August-Universitaet Goettingen (Germany) (2009)
2009
-
[15]
In: AISB workshop on evolutionary computing
Husbands, P., Jermy, G., McIlhagga, M., Ives, R.: Two applications of genetic algorithms to component design. In: AISB workshop on evolutionary computing. pp. 50–61. Springer (1996)
1996
-
[16]
Proceedings of the National Academy of Sciences 117(4), 1853–1859 (2020) 16 L
Kriegman, S., Blackiston, D., Levin, M., Bongard, J.: A scalable pipeline for de- signing reconfigurable organisms. Proceedings of the National Academy of Sciences 117(4), 1853–1859 (2020) 16 L. K. Le Goff et al
2020
-
[17]
In: Proceedings of the Genetic and Evolutionary Computation Conference Companion
LeGoff,L.,Hart,E.:Improvingefficiencyofevolvingrobotdesignsviaself-adaptive learning cycles and an asynchronous architecture. In: Proceedings of the Genetic and Evolutionary Computation Conference Companion. pp. 1607–1615 (2024)
2024
-
[18]
In: Artificial Life Conference Proceedings
Le Goff, L.K., Hart, E., Coninx, A., Doncieux, S.: On pros and cons of evolving topologies with novelty search. In: Artificial Life Conference Proceedings. pp. 423–
-
[19]
MIT Press One Rogers Street, Cambridge, MA 02142-1209, USA (2020)
2020
-
[20]
arXiv preprint arXiv:2411.18423 (2024)
Le Goff, L.K., Smith, S.C.: Efficient and diverse generative robot designs using evolution and intrinsic motivation. arXiv preprint arXiv:2411.18423 (2024)
arXiv 2024
-
[21]
IEEE Transactions on Evolutionary Computation28(6), 1561–1574 (2023)
Li, W., Buchanan, E., Le Goff, L.K., Hart, E., Hale, M.F., Wei, B., De Carlo, M., Angus, M., Woolley, R., Gan, Z., et al.: Evaluation of frameworks that combine evolution and learning to design robots in complex morphological spaces. IEEE Transactions on Evolutionary Computation28(6), 1561–1574 (2023)
2023
-
[22]
In: Linden- mayer systems: Impacts on theoretical computer science, computer graphics, and developmental biology, pp
Lindenmayer, A., Jürgensen, H.: Grammars of development: discrete-state models for growth, differentiation, and gene expression in modular organisms. In: Linden- mayer systems: Impacts on theoretical computer science, computer graphics, and developmental biology, pp. 3–21. Springer (1992)
1992
-
[23]
In: Proceedings of the Genetic and Evolutionary Computation Conference
Medvet, E., Bartoli, A., Pigozzi, F., Rochelli, M.: Biodiversity in evolved voxel- based soft robots. In: Proceedings of the Genetic and Evolutionary Computation Conference. pp. 129–137 (2021)
2021
-
[24]
In: European Conference on Genetic Programming (Part of EvoStar)
Mertan, A., Cheney, N.: Investigating premature convergence in co-optimization of morphology and control in evolved virtual soft robots. In: European Conference on Genetic Programming (Part of EvoStar). pp. 38–55. Springer (2024)
2024
-
[25]
In: Artificial Life Conference Proceedings 37
Mertan, A., Cheney, N.: Evolutionary brain-body co-optimization consistently fails to select for morphological potential. In: Artificial Life Conference Proceedings 37. vol. 2025, p. 63. MIT Press One Rogers Street, Cambridge, MA 02142-1209, USA journals-info ... (2025)
2025
-
[26]
Frontiers in Robotics and AI8, 672379 (2021)
Miras, K.: Constrained by design: Influence of genetic encodings on evolved traits of robots. Frontiers in Robotics and AI8, 672379 (2021)
2021
-
[27]
In: Artificial Life Conference Proceed- ings
Miras, K., Haasdijk, E., Glette, K., Eiben, A.: Effects of selection preferences on evolved robot morphologies and behaviors. In: Artificial Life Conference Proceed- ings. pp. 224–231. MIT Press One Rogers Street, Cambridge, MA 02142-1209, USA (2018)
2018
-
[28]
Mouret, J.B., Clune, J.: Illuminating search spaces by mapping elites (2015), https://arxiv.org/abs/1504.04909
Pith/arXiv arXiv 2015
-
[29]
Nadizar, G., Rusin, F., Medvet, E., Ochoa, G.: The role of stepping stones in map-elites: Insights from search trajectory networks. In: Genetic Programming: 28th European Conference, EuroGP 2025, Held as Part of EvoStar 2025, Tri- este, Italy, April 23–25, 2025, Proceedings. p. 224–239. Springer-Verlag, Berlin, Heidelberg (2025).https://doi.org/10.1007/97...
-
[30]
Frontiers in Robotics and AI 8, 639173 (2021)
Nordmoen, J., Veenstra, F., Ellefsen, K.O., Glette, K.: Map-elites enables powerful stepping stones and diversity for modular robotics. Frontiers in Robotics and AI 8, 639173 (2021)
2021
-
[31]
In: Proceedings of the Genetic and Evolutionary Compu- tation Conference
Scarton, L., Hagg, A.: On the suitability of representations for quality diversity optimization of shapes. In: Proceedings of the Genetic and Evolutionary Compu- tation Conference. p. 963–971. GECCO ’23, Association for Computing Machin- ery, New York, NY, USA (2023).https://doi.org/10.1145/3583131.3590381, https://doi.org/10.1145/3583131.3590381
-
[32]
In: IAPR In- ternational Workshop on Partially Supervised Learning
Smith, S.C., Herrmann, J.M.: Homeokinetic reinforcement learning. In: IAPR In- ternational Workshop on Partially Supervised Learning. pp. 82–91. Springer (2011) Generation of Diverse and Func. Robot using SQ Parametrisation and QD 17
2011
-
[33]
Science201(4356), 579–582 (1978)
Soodak, H., Iberall, A.: Homeokinetics: A physical science for complex systems. Science201(4356), 579–582 (1978)
1978
-
[34]
Genetic programming and evolvable machines8, 131–162 (2007)
Stanley, K.O.: Compositional pattern producing networks: A novel abstraction of development. Genetic programming and evolvable machines8, 131–162 (2007)
2007
-
[35]
In: Artificial Life Conference Proceedings 37
Thomson, S.L., Le Goff, L.K., Hart, E., Eiben, A.E., Luck, K.S.: Understanding the navigation of robot morphology spaces with local optima network analysis. In: Artificial Life Conference Proceedings 37. vol. 2025, p. 42. MIT Press One Rogers Street, Cambridge, MA 02142-1209, USA journals-info ... (2025)
2025
-
[36]
In: Proceedings of the Genetic and Evolutionary Computation Conference Companion
Veenstra, F., Olsen, M.H., Glette, K.: Effects of encodings and quality-diversity on evolving 2d virtual creatures. In: Proceedings of the Genetic and Evolutionary Computation Conference Companion. p. 164–167. GECCO ’22, Association for Computing Machinery, New York, NY, USA (2022).https://doi.org/10.1145/ 3520304.3529053,https://doi.org/10.1145/3520304.3529053
-
[37]
In: 2017 IEEE International Conference on Robotics and Automation (ICRA)
Vezzani, G., Pattacini, U., Natale, L.: A grasping approach based on superquadric models. In: 2017 IEEE International Conference on Robotics and Automation (ICRA). pp. 1579–1586. IEEE (2017)
2017
-
[38]
Autonomous Robots49(3), 1–16 (2025)
Wu, Y., Li, W., Liu, Z., Liu, W., Chirikjian, G.S.: Autonomous learning-free grasp- ing and robot-to-robot handover of unknown objects. Autonomous Robots49(3), 1–16 (2025)
2025
-
[39]
arXiv preprint arXiv:2503.16127 (2025)
Xie, Y., Chu, K.f., Wang, X., Iida, F.: The morphology-control trade-off: Insights into soft robotic efficiency. arXiv preprint arXiv:2503.16127 (2025)
arXiv 2025
-
[40]
In: 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
Xie, Y., Pinskier, J., Liow, L., Howard, D., Iida, F.: A’map’to find high-performing soft robot designs: Traversing complex design spaces using map-elites and topology optimization. In: 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). pp. 11408–11415. IEEE (2024)
2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.