TreeSeeker: Tree-Structured Trial, Error, and Return in Deep Search
Pith reviewed 2026-06-27 10:11 UTC · model grok-4.3
The pith
TreeSeeker structures deep search as tree branches and uses textual UCB signals to decide when to exploit, explore, or prune paths.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
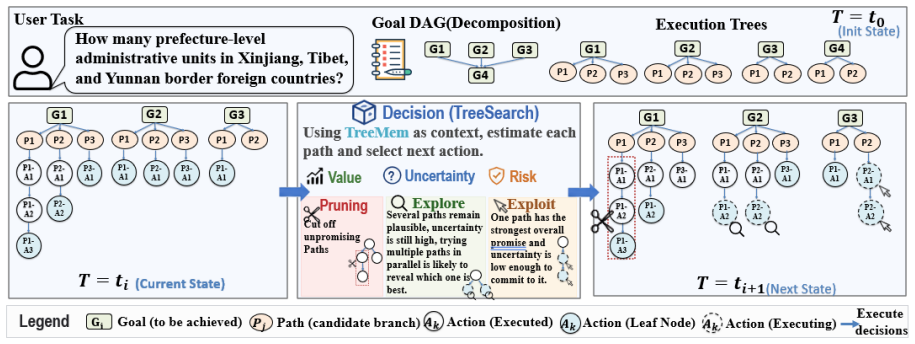
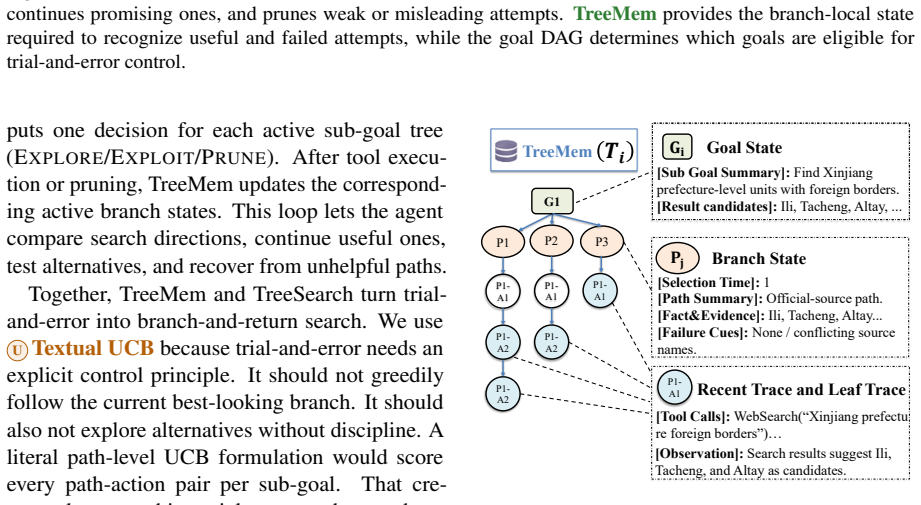
TreeSeeker organizes search as branch-and-return search over tree-structured states, where each branch is a tentative direction for a sub-goal. At each round, TreeSeeker reads all sub-goal trees, identifies active goals, and uses textual UCB signals of value, uncertainty, and risk to select among exploiting a promising branch, exploring an uncertain alternative, or pruning an unproductive continuation and returning to an earlier branch point. TreeMem supports this control loop by keeping evidence, uncertainty, conflicts, progress, and failure cues attached to the branches that produced them, so trial outcomes can guide later decisions.
What carries the argument
Tree-structured states with branch-and-return control driven by textual UCB signals of value, uncertainty, and risk, backed by TreeMem for attaching evidence to branches.
If this is right
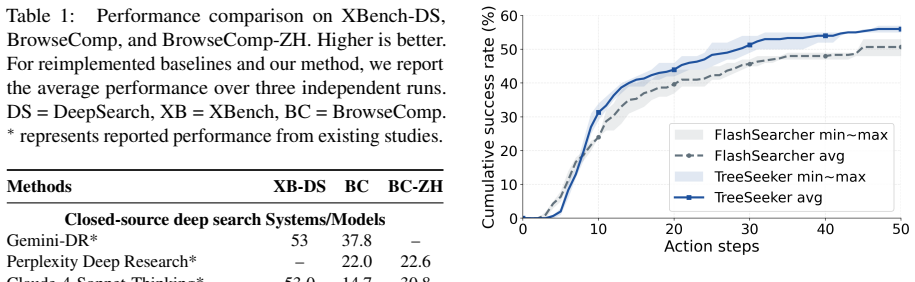
- TreeSeeker outperforms strong open-source baselines on XBench-DeepSearch, BrowseComp, and BrowseComp-ZH.
- Explicit branch-and-return control complements stronger reasoning and tool execution at inference time.
- Agents can prune unproductive continuations and return to earlier branch points using risk signals.
- Trial outcomes stored in TreeMem allow past evidence to inform later exploit/explore choices without retraining.
Where Pith is reading between the lines
- The same textual-signal approach could be tested on non-web tasks such as multi-step planning or code search where numeric rewards are unavailable.
- If branch descriptions alone suffice for UCB-style decisions, agents might reduce reliance on separately trained value heads.
- The tree-plus-return pattern offers a concrete way to add backtracking to chain-of-thought or tool-use loops that currently lack it.
- A direct comparison replacing textual UCB with numeric Monte-Carlo estimates on the same benchmarks would clarify how much the language-based encoding contributes.
Load-bearing premise
Textual UCB signals computed from branch descriptions can reliably encode value, uncertainty, and risk to guide decisions on when to exploit, explore, or prune without further training or external calibration.
What would settle it
An experiment that replaces the textual UCB selection rule with uniform random branch choice on the same three benchmarks and finds no drop in performance would show the signals are not carrying the claimed decision value.
Figures

read the original abstract
Deep search requires agents to answer complex questions through multi-step web search, browsing, evidence comparison, and synthesis. A central challenge is deciding how to search when several directions look plausible but only some will later lead to reliable evidence. If an agent greedily follows the current best-looking direction, it may keep extending a weak continuation. If it explores without discipline, it may waste budget on disconnected trials. We propose TreeSeeker, an inference-time framework for controlled trial-and-error in deep search. TreeSeeker organizes search as branch-and-return search over tree-structured states, where each branch is a tentative direction for a sub-goal. At each round, TreeSearch reads all sub-goal trees, identifies active goals, and uses textual UCB signals of value, uncertainty, and risk to select among exploiting a promising branch, exploring an uncertain alternative, or pruning an unproductive continuation and returning to an earlier branch point. TreeMem supports this control loop by keeping evidence, uncertainty, conflicts, progress, and failure cues attached to the branches that produced them, so trial outcomes can guide later decisions. Experiments on XBench-DeepSearch, BrowseComp, and BrowseComp-ZH show that TreeSeeker consistently outperforms strong open-source baselines, suggesting that explicit branch-and-return control complements stronger reasoning and tool execution.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes TreeSeeker, an inference-time framework for deep search that structures agent behavior as branch-and-return search over tree-structured states. Each branch represents a tentative sub-goal direction; at each step the system uses textual UCB signals (value, uncertainty, risk) computed from branch descriptions to decide whether to exploit a promising branch, explore an uncertain one, or prune and return to an earlier point. TreeMem maintains attached evidence, conflicts, and failure cues to support these decisions. The central empirical claim is that TreeSeeker consistently outperforms strong open-source baselines on XBench-DeepSearch, BrowseComp, and BrowseComp-ZH.
Significance. If the claimed outperformance is reproducible and attributable to the UCB-guided control rather than the tree structure or base model alone, the work would demonstrate a practical inference-time mechanism for disciplined trial-and-error in multi-step web search and synthesis without additional training or external calibration.
major comments (3)
- [Abstract] Abstract: the claim that TreeSeeker 'consistently outperforms strong open-source baselines' is stated without any numerical results, error bars, baseline names, or implementation details. This absence makes the central empirical claim unverifiable from the manuscript as presented.
- [Framework description] Framework description (paragraphs introducing textual UCB): no explicit computation rule, prompting template, or formula is supplied for deriving the value, uncertainty, and risk components from branch descriptions. Because the paper attributes performance gains specifically to the UCB-driven exploit/explore/prune loop, the lack of this operational definition is load-bearing for the central claim.
- [Experiments] No ablation isolating the textual UCB component versus the tree structure or TreeMem alone is described. Without such a control, outperformance on the three benchmarks could be explained by the base reasoning model or tree organization rather than the proposed control loop.
minor comments (1)
- [Abstract] The abstract refers to 'TreeSearch' when describing the control loop; this appears to be a typographical inconsistency with the title and defined term TreeSeeker.
Simulated Author's Rebuttal
We thank the referee for the thoughtful and constructive comments on our manuscript. We address each of the major comments below and outline the revisions we will make to strengthen the paper.
read point-by-point responses
-
Referee: [Abstract] Abstract: the claim that TreeSeeker 'consistently outperforms strong open-source baselines' is stated without any numerical results, error bars, baseline names, or implementation details. This absence makes the central empirical claim unverifiable from the manuscript as presented.
Authors: We agree that including quantitative results in the abstract would make the central claim more verifiable. In the revised manuscript, we will update the abstract to include specific performance numbers (e.g., accuracy improvements on XBench-DeepSearch, BrowseComp, and BrowseComp-ZH), names of the strong open-source baselines used, and references to error bars or standard deviations from our experimental results. revision: yes
-
Referee: [Framework description] Framework description (paragraphs introducing textual UCB): no explicit computation rule, prompting template, or formula is supplied for deriving the value, uncertainty, and risk components from branch descriptions. Because the paper attributes performance gains specifically to the UCB-driven exploit/explore/prune loop, the lack of this operational definition is load-bearing for the central claim.
Authors: We acknowledge that the manuscript would benefit from a more explicit description of how the textual UCB signals are computed. We will add the specific prompting templates used to elicit value, uncertainty, and risk scores from the branch descriptions, along with any aggregation rules or decision criteria for the exploit/explore/prune loop, in the revised framework description section. revision: yes
-
Referee: [Experiments] No ablation isolating the textual UCB component versus the tree structure or TreeMem alone is described. Without such a control, outperformance on the three benchmarks could be explained by the base reasoning model or tree organization rather than the proposed control loop.
Authors: The referee raises a valid point regarding the need for ablations to isolate the contribution of the textual UCB component. Our current experiments demonstrate outperformance over baselines that do not employ the full TreeSeeker framework, but to more rigorously attribute gains to the UCB-guided control, we will include additional ablation studies in the revised manuscript comparing the full system against variants that use the tree structure and TreeMem without the UCB signals. revision: yes
Circularity Check
No significant circularity detected
full rationale
The paper introduces TreeSeeker as a new inference-time tree-structured search framework that organizes branches with textual UCB signals for exploit/explore/prune decisions and validates it via experiments on external benchmarks (XBench-DeepSearch, BrowseComp, BrowseComp-ZH). No load-bearing step reduces by construction to a fitted parameter, self-citation chain, or self-definitional loop; the method description and performance claims remain independent of any prior author results or internal re-labeling of inputs as outputs. The derivation chain is therefore self-contained against external evaluation.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Textual UCB signals derived from branch descriptions can be computed to represent value, uncertainty, and risk for selection decisions.
- domain assumption Search states can be effectively organized and controlled as a tree of tentative sub-goal branches with return capability.
invented entities (2)
-
TreeSeeker
no independent evidence
-
TreeMem
no independent evidence
Reference graph
Works this paper leans on
-
[1]
arXiv preprint arXiv:2506.13651 , year=
Finite-time analysis of the multiarmed ban- dit problem.Mach. Learn., 47(2–3):235–256. Guoxin Chen, Zile Qiao, Xuanzhong Chen, Donglei Yu, Haotian Xu, Xin Zhao, Ruihua Song, Wenbiao Yin, Huifeng Yin, Liwen Zhang, Kuan Li, Minpeng Liao, Yong Jiang, Pengjun Xie, Fei Huang, and Jingren Zhou. 2026a. Iterresearch: Rethinking long-horizon agents with interactio...
-
[2]
Agentfold: Long-horizon web agents with proactive context management.arXiv preprint arXiv:2510.24699. Hongli Yu, Tinghong Chen, Jiangtao Feng, Jiangjie Chen, Weinan Dai, Qiying Yu, Ya-Qin Zhang, Wei- Ying Ma, Jingjing Liu, Mingxuan Wang, and Hao Zhou. 2026. Memagent: Reshaping long-context LLM with multi-conv RL-based memory agent. In The Fourteenth Inter...
-
[3]
integrates reasoning, acting, and planning in an MCTS-style framework, providing a tree- search baseline for agentic reasoning. • Reported open-source model systems.We also include reported results for open-source model or agent systems such as DeepSeek-R1 (Guo et al., 2025), Qwen3 (Yang et al., 2025), K2 (Team et al., 2025a), Search-o1 (Li et al., 2025b)...
2025
-
[4]
Goal Decomposition: Break the task into 1-5 goals
-
[5]
Goals with no dependencies can execute in parallel
Dependency Declaration: For each goal, explicitly state which other goals it depends on (DAG structure). Goals with no dependencies can execute in parallel. Goals with dependencies must wait until ALL their dependencies are completed. ,→ ,→ ,→ ,→
-
[6]
Path Diversity: For each goal, design 1-5 ALTERNATIVE execution paths (any single path succeeding completes the goal) ,→ ,→
-
[7]
Goal 2 (Search Y's population) depends on Goal 1 (Search X's population)
Path Specificity: Each path must specify: - Core approach/technique to achieve the goal - Success criteria ### DAG Design Principles: **CRITICAL RULE: Goal B depends on Goal A ONLY when Goal B literally CANNOT START without the OUTPUT/RESULT produced by Goal A. If Goal B can begin independently -- even if thematically related -- it MUST have Dependencies:...
-
[8]
**exploit**: Use when one path has the strongest overall promise and uncertainty is low enough to commit to it for now. ,→ ,→
-
[9]
,→ ,→ ,→
**explore**: Use when several paths remain plausible, uncertainty is still high, and trying multiple paths in parallel is likely to reveal which one is best. ,→ ,→ ,→
-
[10]
If a path has been selected 8+ times without escaping the loop, you may **consider** backtracking; if 12+ times, you **MUST** backtrack
**backtrack**: Use when a path has been tried multiple times and got stuck — likely because earlier rounds followed an unreliable source, clicked a misleading link, or anchored on a noisy intermediate result, causing this path to loop on the same dead-end information. If a path has been selected 8+ times without escaping the loop, you may **consider** bac...
-
[11]
can the original task be answered NOW with the evidence already collected across ALL goals?
**finished**: Use when ALL goals have gathered enough evidence to answer the original task. You do NOT need perfect or exhaustive evidence — if the key constraints of the question are supported by findings, finish immediately. Continuing to search after you have a well-supported answer wastes budget and risks overwriting correct conclusions with noise. ,→...
-
[12]
Briefly explain the original plan's goals and their corresponding execution paths,→
-
[13]
Goal X: resolved, result is [result summary]
Analyze the completion status of each goal's execution paths:,→ - For completed goals: "Goal X: resolved, result is [result summary]",→ - For partially completed goals: "Goal Y: completed up to path n, previous path results: [summary of results]" ,→ ,→ - For blocked or inefficient paths: Optimize the behaviors of such paths (including tool selection and t...
-
[14]
Determine the next parallel sub-paths to solve based on current information,→ Pay special attention to:
-
[15]
Using the execution trajectory to accurately judge whether each goal's paths are completed, blocked, or in progress ,→ ,→
-
[16]
Prioritizing adjustment of stagnant paths if trajectories show loops or inefficiency in certain goals ,→ ,→
-
[17]
Consolidating facts derived from completed paths to support unresolved goals,→
-
[18]
Identifying dependencies between goals and paths that may affect parallel execution,→ **Part 2 (Progress JSON — strict JSON after the separator):**,→
-
[19]
Extract new facts, revise existing ones, and track candidate answers.,→
-
[20]
For each goal, estimate a completion_ratio (0.0-1.0) based on evidence collected.,→ - 0.0 = no progress, 0.5 = about half done, 1.0 = effectively complete,→ - If completion_ratio >= 0.9, the goal will be auto-marked as completed.,→
-
[21]
1.1", "1.2
**CRITICAL: For each goal, write COMPREHENSIVE per-path summary reports (path_summaries).**,→ Each path_summary is a self-contained progress report for that specific path.,→ **PATH_ID keys MUST be the numeric path identifier exactly as shown in the plan (e.g., "1.1", "1.2", "2.1"). Do NOT use path names, descriptions, or any other format. Only paths that ...
-
[22]
The player was drafted in the first round
**For each goal, also write a brief goal_summary** — a 2-4 sentence high-level synthesis of the goal's overall progress across ALL paths. This should capture the key conclusion or current status of the entire goal, not repeat per-path details. ,→ ,→ ,→ ,→ ,→ ## CRITICAL: Precision Rules for Facts - ALWAYS preserve exact values: numbers, dates, names, epis...
2015
-
[23]
completed
If a goal is completed, mark as "completed" and summarize the result,→
-
[24]
If a path of a goal is blocked or inefficient, update this path and conclude the past paths,→ 18
-
[25]
Ensure the next parallel paths are directly derived from unresolved goals in the execution trajectory ,→ ,→
-
[26]
goals": {
Consider dependencies between goals when suggesting parallel paths,→ ** Output Format — TWO parts separated by `---PROGRESS_JSON---`**:,→ ## Plan Summary [Provide a brief summary of the original plan's goals and their execution paths],→ ## Execution Status Analysis ### Goal 1: [Goal Name] - Status: [Completed/In Progress/Blocked] - Path Analysis: [Analyze...
2012
-
[27]
three-stage develop- ment
Goal 4 merges the evidence and selects the final answer. Unlike Flash-Searcher, the early execution does not immediately commit to one locally plausible answer. Early UCB-guided deci- sions use exploration to spread the search over several evidence entrances: which activ- ities have a three-stage-development account, which are performed during Chinese New...
2000
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.