Comparing Commercial Depth Sensor Accuracy for Medical Applications
Pith reviewed 2026-06-27 06:27 UTC · model grok-4.3
The pith
The Zivid 2M+ 60 sensor delivered the highest depth accuracy on porcine tissue and a kidney phantom among four commercial devices tested.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
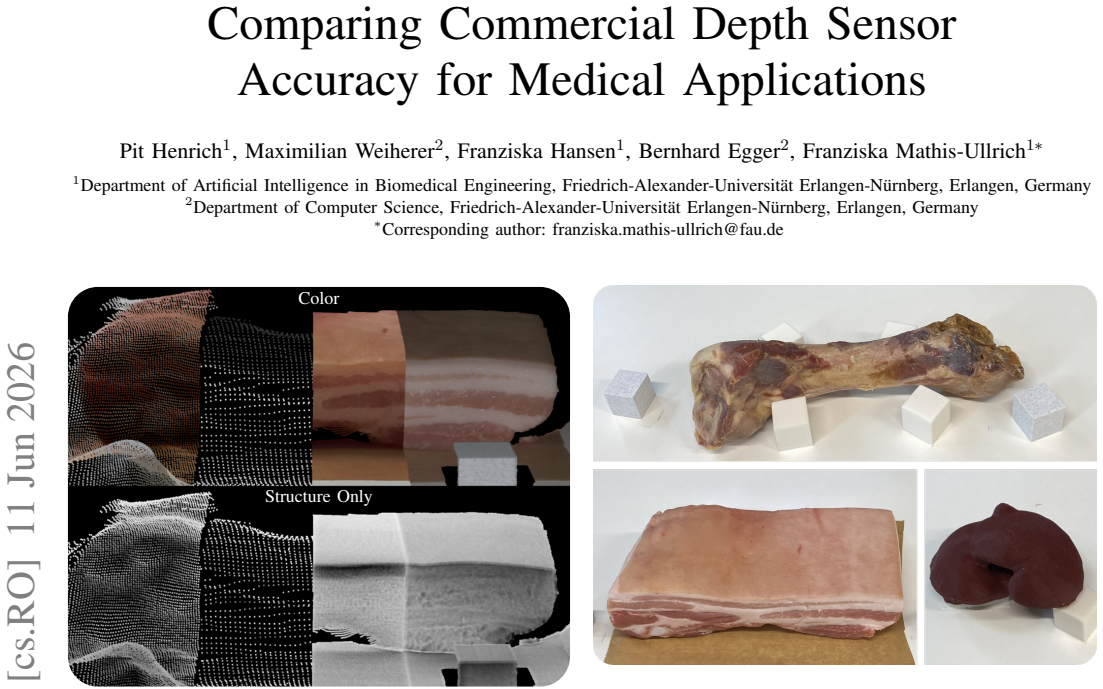
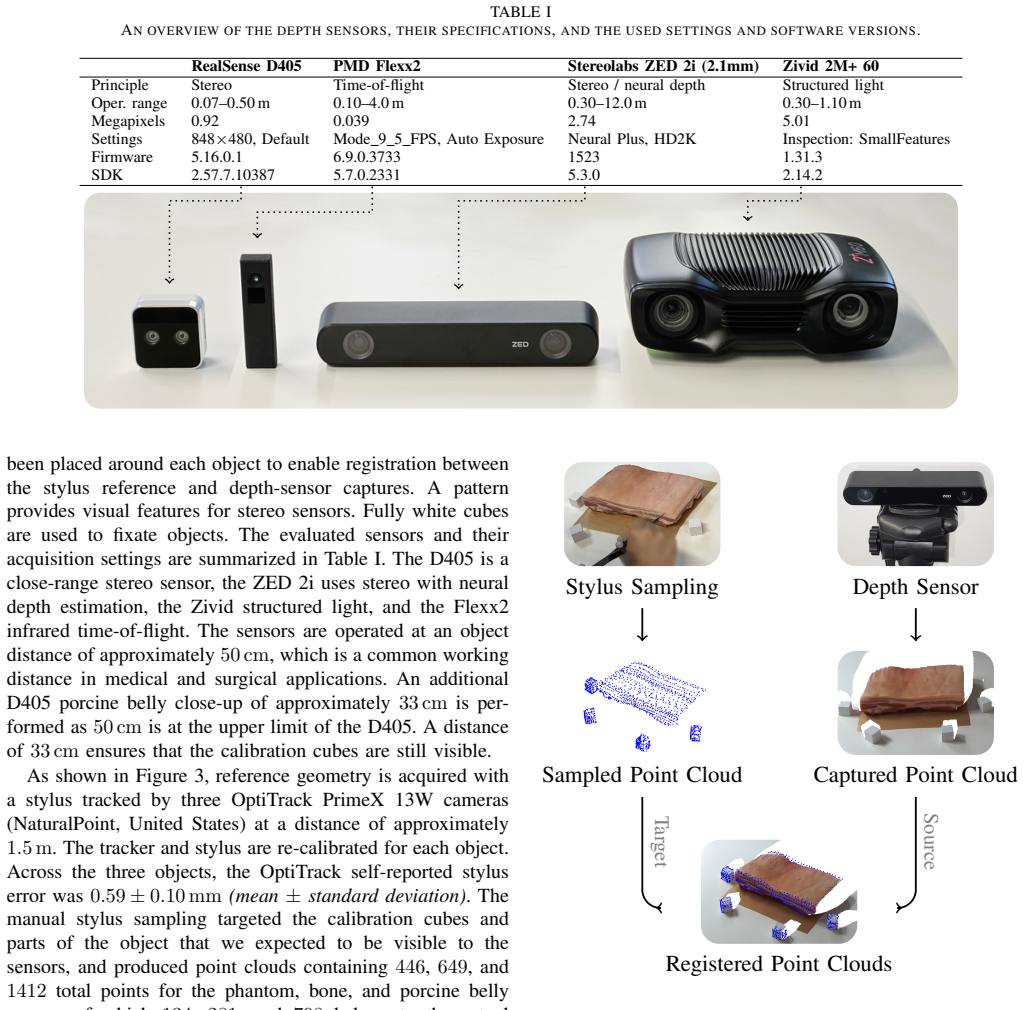
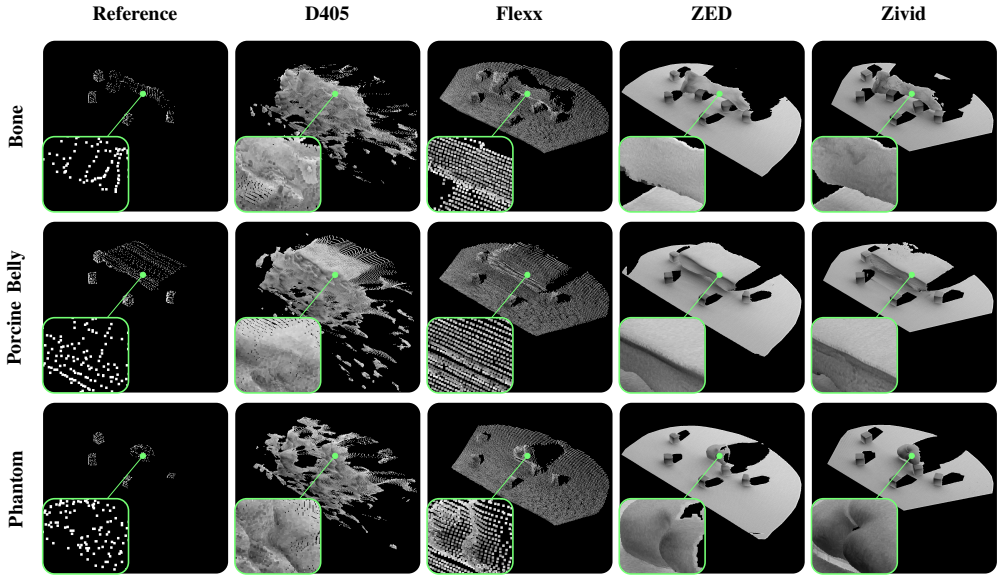
We benchmark four depth sensors on a porcine bone specimen, a porcine belly specimen, and a silicone kidney phantom using stylus-sampled references. These objects contain several real-world challenges, including homogeneous surfaces, specular surfaces, and subsurface scattering. The comparison includes stereo, structured-light, and time-of-flight sensors at a distance of approximately 50 cm. Specifically, the Intel RealSense D405, PMD Flexx2, Stereolabs ZED 2i, and Zivid 2M+ 60 are compared. The Zivid 2M+ 60 performed best across all objects and metrics considered in this work. The ZED ranked second for real tissue, but last on the phantom.
What carries the argument
Stylus-sampled reference points serving as ground-truth depth values on the three test objects.
If this is right
- Medical systems needing depth at close range can prioritize the Zivid 2M+ 60 over the other three sensors on similar surfaces.
- The ZED 2i may still be usable on real tissue but should be avoided on phantoms with homogeneous or scattering properties.
- Structured-light or time-of-flight designs appear more robust than stereo under the tested conditions at 50 cm.
- Sensor choice for surgical navigation or robotic assistance can be narrowed using these concrete rankings rather than manufacturer specifications alone.
Where Pith is reading between the lines
- The ranking may shift if the working distance changes substantially from 50 cm or if different reference measurement methods replace the stylus.
- Results on porcine tissue suggest that performance on living human tissue could follow similar patterns, though vascular or motion effects remain untested.
- Hardware selection for depth-based medical imaging pipelines can now incorporate these empirical differences when trading off cost, size, and accuracy.
Load-bearing premise
Stylus-sampled points provide accurate ground-truth depth values on the porcine specimens and phantom despite homogeneous surfaces, specular reflections, and subsurface scattering.
What would settle it
Independent verification that the stylus points deviate from the true surface geometry on the porcine specimens by more than the reported sensor errors would reverse the accuracy ranking.
Figures
read the original abstract
Depth estimation has numerous medical and surgical applications. We benchmark four depth sensors on a porcine bone specimen, a porcine belly specimen, and a silicone kidney phantom using stylus-sampled references. These objects contain several real-world challenges, including homogeneous surfaces, specular surfaces, and subsurface scattering. The comparison includes stereo, structured-light, and time-of-flight sensors at a distance of approximately 50 cm. Specifically, the Intel RealSense D405 (Intel RealSense, United States), PMD Flexx2 (pmdtechnologies, Germany), Stereolabs ZED 2i (Stereolabs, France), and Zivid 2M+ 60 (Zivid, Norway) are compared. The Zivid 2M+ 60 performed best across all objects and metrics considered in this work. The ZED ranked second for real tissue, but last on the phantom.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents an empirical benchmark of four commercial depth sensors (Intel RealSense D405, PMD Flexx2, Stereolabs ZED 2i, Zivid 2M+ 60) on a porcine bone specimen, porcine belly specimen, and silicone kidney phantom at ~50 cm distance. Using stylus-sampled points as ground truth, the authors evaluate performance on objects exhibiting homogeneous surfaces, specular reflections, and subsurface scattering. They conclude that the Zivid 2M+ 60 performed best across all objects and metrics, while the ZED 2i ranked second on real tissue but last on the phantom.
Significance. If the ground-truth method is validated, the work supplies practical guidance for depth-sensor selection in medical and surgical applications involving real tissue and phantoms. The inclusion of both biological specimens and multiple sensing modalities (stereo, structured light, ToF) adds relevance. However, the absence of any quantitative error values or statistical details in the abstract limits immediate utility, and the unvalidated reference method reduces the strength of the reported rankings.
major comments (2)
- [Abstract] Abstract: the central ranking claims (Zivid best overall; ZED second on tissue, last on phantom) are asserted without any quantitative error values, statistical tests, sample sizes, or protocol details, preventing verification of the performance claims.
- [Methods (ground-truth acquisition)] Methods (stylus ground-truth acquisition): stylus-sampled points are treated as accurate references for all error metrics despite the explicit presence of specular reflections and subsurface scattering on the tested surfaces; no repeatability tests, CMM comparison, or error-propagation analysis is reported. This assumption is load-bearing for the sensor rankings.
minor comments (2)
- [Abstract] Abstract: the specific error metrics (e.g., RMSE, MAE) and number of sampled points per object are not named.
- [Abstract] Abstract: the exact sensor-to-object distance variation and calibration procedure are described only as 'approximately 50 cm'.
Simulated Author's Rebuttal
We appreciate the referee's thorough review and constructive feedback on our manuscript comparing commercial depth sensors for medical applications. Below, we provide point-by-point responses to the major comments.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central ranking claims (Zivid best overall; ZED second on tissue, last on phantom) are asserted without any quantitative error values, statistical tests, sample sizes, or protocol details, preventing verification of the performance claims.
Authors: We concur that the abstract lacks quantitative details to support the stated rankings. We will revise the abstract to incorporate key quantitative results, including mean absolute errors and standard deviations for each sensor across specimens, the number of stylus-sampled points, and a note on statistical significance of differences. This will allow readers to verify the claims while remaining within abstract length limits. revision: yes
-
Referee: [Methods (ground-truth acquisition)] Methods (stylus ground-truth acquisition): stylus-sampled points are treated as accurate references for all error metrics despite the explicit presence of specular reflections and subsurface scattering on the tested surfaces; no repeatability tests, CMM comparison, or error-propagation analysis is reported. This assumption is load-bearing for the sensor rankings.
Authors: This is a fair critique. The manuscript does not include repeatability tests, CMM comparisons, or error-propagation analysis for the stylus method. We will revise the Methods and add a limitations discussion to explicitly acknowledge potential inaccuracies from surface properties (specular reflections, subsurface scattering) and note that the same reference was applied uniformly to enable relative comparisons. We cannot conduct or report new validation experiments in this revision cycle. revision: partial
- Full empirical validation of the stylus ground-truth method (repeatability tests, CMM comparison, or error-propagation analysis)
Circularity Check
Pure empirical benchmark with no derivations or self-referential steps
full rationale
The paper reports direct measurements of depth sensor errors on porcine specimens and a phantom, using stylus-sampled points as external ground-truth references. No equations, fitted parameters, predictions, or theoretical derivations are present. The sensor ranking follows immediately from the computed error metrics (e.g., mean absolute error) against the stylus data. No self-citations of theorems, ansatzes, or uniqueness results are invoked. The central claim is therefore a straightforward empirical comparison that does not reduce to its own inputs by construction.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
SOFA: A Multi-Model Framework for Interactive Physical Simulation
Faure, Fran c ois and Duriez, Christian and Delingette, Herv \'e and Allard, J \'e r \'e mie and Gilles, Benjamin and Marchesseau, St \'e phanie and Talbot, Hugo and Courtecuisse, Hadrien and Bousquet, Guillaume and Peterlik, Igor and Cotin, St \'e phane. SOFA: A Multi-Model Framework for Interactive Physical Simulation. Soft Tissue Biomechanical Modeling...
-
[2]
Decoupled Weight Decay Regularization , author=. Int. Conf. Learn. Rep. , year=
-
[3]
Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision , pages=
Registered and Segmented Deformable Object Reconstruction from a Single View Point Cloud , author=. Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision , pages=
-
[4]
2022 , month = apr, journal =
Open Simulation Environment for Learning and Practice of Robot-Assisted Surgical Suturing , author =. 2022 , month = apr, journal =
2022
-
[5]
Scheikl, Paul Maria and Tagliabue, Eleonora and Gyenes, Bal. Sim-to-. 2023 , month = feb, journal =
2023
-
[6]
Automating Surgical Peg Transfer: Calibration With Deep Learning Can Exceed Speed, Accuracy, and Consistency of Humans , shorttitle =
Hwang, Minho and Ichnowski, Jeffrey and Thananjeyan, Brijen and Seita, Daniel and Paradis, Samuel and Fer, Danyal and Low, Thomas and Goldberg, Ken , year =. Automating Surgical Peg Transfer: Calibration With Deep Learning Can Exceed Speed, Accuracy, and Consistency of Humans , shorttitle =. IEEE Transactions on Automation Science and Engineering , volume =
-
[7]
2018 , publisher=
Camera-aided robot calibration , author=. 2018 , publisher=
2018
-
[8]
1955 , publisher=
A kinematic notation for lower-pair mechanisms based on matrices , author=. 1955 , publisher=
1955
-
[9]
Denavit, J. and Hartenberg, R. S. , title =. Journal of Applied Mechanics , volume =. 2021 , month =. doi:10.1115/1.4011045 , url =
-
[10]
and Husain, Siraj and Usmani, Nawaid and Tavakoli, Mahdi , year =
Afshar, Mehrnoosh and Carriere, Jay and Meyer, Tyler and Sloboda, Ron S. and Husain, Siraj and Usmani, Nawaid and Tavakoli, Mahdi , year =. A. IEEE Transactions on Medical Robotics and Bionics , volume =
-
[11]
Zhong, Fangxun and Wang, Yaqing and Wang, Zerui and Liu, Yun-Hui , year =. Dual-. IEEE Robotics and Automation Letters , volume =
-
[12]
and Armand, Mehran , year =
Alambeigi, Farshid and Wang, Zerui and Liu, Yun-hui and Taylor, Russell H. and Armand, Mehran , year =. Toward. Annals of Biomedical Engineering , volume =
-
[13]
and Kuntz, Alan and Hermans, Tucker , year =
Thach, Bao and Cho, Brian Y. and Kuntz, Alan and Hermans, Tucker , year =. Learning. 2022. 2110.04685 , primaryclass =
arXiv 2022
-
[14]
Ou, Yafei and Tavakoli, Mahdi , year =. Sim-to-. IEEE Robotics and Automation Letters , volume =
-
[15]
Proceedings of the IEEE conference on computer vision and pattern recognition , pages=
Pointnet: Deep learning on point sets for 3d classification and segmentation , author=. Proceedings of the IEEE conference on computer vision and pattern recognition , pages=
-
[16]
PointNet++: Deep Hierarchical Feature Learning on Point Sets in a Metric Space , url =
Qi, Charles Ruizhongtai and Yi, Li and Su, Hao and Guibas, Leonidas J , booktitle =. PointNet++: Deep Hierarchical Feature Learning on Point Sets in a Metric Space , url =
-
[17]
LOOC: Localizing Organs Using Occupancy Networks and Body Surface Depth Images , year=
Henrich, Pit and Mathis-Ullrich, Franziska , journal=. LOOC: Localizing Organs Using Occupancy Networks and Body Surface Depth Images , year=
-
[18]
Advances in Neural Information Processing Systems , volume=
Introspective learning: A two-stage approach for inference in neural networks , author=. Advances in Neural Information Processing Systems , volume=
-
[19]
Proceedings of The 33rd International Conference on Machine Learning , pages =
Dropout as a Bayesian Approximation: Representing Model Uncertainty in Deep Learning , author =. Proceedings of The 33rd International Conference on Machine Learning , pages =. 2016 , editor =
2016
-
[20]
Proceedings of the IEEE/CVF conference on computer vision and pattern recognition , pages=
Deepsdf: Learning continuous signed distance functions for shape representation , author=. Proceedings of the IEEE/CVF conference on computer vision and pattern recognition , pages=
-
[21]
Proceedings of the IEEE/CVF conference on computer vision and pattern recognition , pages=
Occupancy networks: Learning 3d reconstruction in function space , author=. Proceedings of the IEEE/CVF conference on computer vision and pattern recognition , pages=
-
[22]
2020 International Symposium on Medical Robotics (ISMR) , author=
Rigid 3D Registration of Pre-operative Information for Semi-Autonomous Surgery , DOI=. 2020 International Symposium on Medical Robotics (ISMR) , author=. 2020 , month=
2020
-
[23]
Unrolling of deep graph total variation for image denoising,
Improving Intraoperative Liver Registration in Image-Guided Surgery with Learning-Based Reconstruction , ISSN=. ICASSP 2021 - 2021 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP) , author=. 2021 , month=. doi:10.1109/ICASSP39728.2021.9414549 , abstractNote=
-
[24]
Deng, Bailin and Yao, Yuxin and Dyke, Roberto M. and Zhang, Juyong , title =. Computer Graphics Forum , volume =. doi:https://doi.org/10.1111/cgf.14502 , url =. https://onlinelibrary.wiley.com/doi/pdf/10.1111/cgf.14502 , abstract =
-
[25]
Sensor fusion IV: control paradigms and data structures , volume=
Method for registration of 3-D shapes , author=. Sensor fusion IV: control paradigms and data structures , volume=. 1992 , organization=
1992
-
[26]
and McKay, Neil D
Besl, P.J. and McKay, Neil D. , journal=. A method for registration of 3-D shapes , year=
-
[27]
Communications of the ACM , volume=
Nerf: Representing scenes as neural radiance fields for view synthesis , author=. Communications of the ACM , volume=. 2021 , publisher=
2021
-
[28]
International conference on machine learning , pages=
On the spectral bias of neural networks , author=. International conference on machine learning , pages=. 2019 , organization=
2019
-
[29]
International journal of computer assisted radiology and surgery , volume=
Learning soft tissue behavior of organs for surgical navigation with convolutional neural networks , author=. International journal of computer assisted radiology and surgery , volume=. 2019 , publisher=
2019
-
[30]
Medical Image Computing and Computer Assisted Intervention--MICCAI 2020: 23rd International Conference, Lima, Peru, October 4--8, 2020, Proceedings, Part IV 23 , pages=
Non-rigid volume to surface registration using a data-driven biomechanical model , author=. Medical Image Computing and Computer Assisted Intervention--MICCAI 2020: 23rd International Conference, Lima, Peru, October 4--8, 2020, Proceedings, Part IV 23 , pages=. 2020 , organization=
2020
-
[31]
Journal of Mathematical Imaging and Vision , volume=
Metrics for 3D rotations: Comparison and analysis , author=. Journal of Mathematical Imaging and Vision , volume=. 2009 , publisher=
2009
-
[32]
Movement Primitive Diffusion: Learning Gentle Robotic Manipulation of Deformable Objects , year=
Scheikl, Paul Maria and Schreiber, Nicolas and Haas, Christoph and Freymuth, Niklas and Neumann, Gerhard and Lioutikov, Rudolf and Mathis-Ullrich, Franziska , journal=. Movement Primitive Diffusion: Learning Gentle Robotic Manipulation of Deformable Objects , year=
-
[33]
Adam: A Method for Stochastic Optimization , year =
Kingma, Diederik and Ba, Jimmy , booktitle =. Adam: A Method for Stochastic Optimization , year =
-
[34]
Advances in neural information processing systems , volume=
What uncertainties do we need in bayesian deep learning for computer vision? , author=. Advances in neural information processing systems , volume=
-
[35]
arXiv preprint arXiv:1702.04595 , year=
Visualizing deep neural network decisions: Prediction difference analysis , author=. arXiv preprint arXiv:1702.04595 , year=
-
[36]
International Conference on Learning Representations , year=
Visualizing Deep Neural Network Decisions: Prediction Difference Analysis , author=. International Conference on Learning Representations , year=
-
[37]
Proceedings of the IEEE international conference on computer vision , pages=
Interpretable explanations of black boxes by meaningful perturbation , author=. Proceedings of the IEEE international conference on computer vision , pages=
-
[38]
Proceedings of the IEEE international conference on computer vision , pages=
Grad-cam: Visual explanations from deep networks via gradient-based localization , author=. Proceedings of the IEEE international conference on computer vision , pages=
-
[39]
arXiv preprint arXiv:1806.08756 , year=
Dense object nets: Learning dense visual object descriptors by and for robotic manipulation , author=. arXiv preprint arXiv:1806.08756 , year=
-
[40]
Proceedings of The 2nd Conference on Robot Learning , pages =
Dense Object Nets: Learning Dense Visual Object Descriptors By and For Robotic Manipulation , author =. Proceedings of The 2nd Conference on Robot Learning , pages =. 2018 , editor =
2018
-
[41]
Conference on Robot Learning , pages=
Dense Object Nets: Learning Dense Visual Object Descriptors By and For Robotic Manipulation , author=. Conference on Robot Learning , pages=. 2018 , organization=
2018
-
[42]
Tracking Tumors under Deformation from Partial Point Clouds using Occupancy Networks , year=
Henrich, Pit and Liu, Jiawei and Ge, Jiawei and Schmidgall, Samuel and Shepard, Lauren and Ghazi, Ahmed Ezzat and Mathis-Ullrich, Franziska and Krieger, Axel , booktitle=. Tracking Tumors under Deformation from Partial Point Clouds using Occupancy Networks , year=
-
[43]
Proceedings of the 36th International Conference on Machine Learning , pages =
On the Spectral Bias of Neural Networks , author =. Proceedings of the 36th International Conference on Machine Learning , pages =. 2019 , editor =
2019
-
[44]
, journal=
Tian, Sizhe and Cangan, Barnabas Gavin and Navarro, Stefan Escaida and Beger, Artem and Duriez, Christian and Katzschmann, Robert K. , journal=. Multi-Tap Resistive Sensing and FEM Modeling Enables Shape and Force Estimation in Soft Robots , year=
-
[45]
2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , pages=
Shape Servoing of a Soft Object Using Fourier Series and a Physics-based Model , author=. 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , pages=. 2023 , organization=
2023
-
[46]
IEEE Transactions on Industrial Informatics , year=
Sim-to-real transfer of soft robotic navigation strategies that learns from the virtual eye-in-hand vision , author=. IEEE Transactions on Industrial Informatics , year=
-
[47]
Medical physics , volume=
Accuracy of finite element model-based multi-organ deformable image registration , author=. Medical physics , volume=. 2005 , publisher=
2005
-
[48]
and Jarnagin, William R
Heiselman, Jon S. and Jarnagin, William R. and Miga, Michael I. , journal=. Intraoperative Correction of Liver Deformation Using Sparse Surface and Vascular Features via Linearized Iterative Boundary Reconstruction , year=
-
[49]
LIBR+: Improving Intraoperative Liver Registration by Learning the Residual of Biomechanics-Based Deformable Registration
Wang, Dingrong and Azadvar, Soheil and Heiselman, Jon and Jiang, Xiajun and Miga, Michael and Wang, Linwei. LIBR+: Improving Intraoperative Liver Registration by Learning the Residual of Biomechanics-Based Deformable Registration. Medical Image Computing and Computer Assisted Intervention -- MICCAI 2024. 2024
2024
-
[50]
Journal of medical imaging , volume=
Characterization and correction of intraoperative soft tissue deformation in image-guided laparoscopic liver surgery , author=. Journal of medical imaging , volume=. 2018 , publisher=
2018
-
[51]
Proceedings of the IEEE/CVF conference on computer vision and pattern recognition , pages=
Meshgpt: Generating triangle meshes with decoder-only transformers , author=. Proceedings of the IEEE/CVF conference on computer vision and pattern recognition , pages=
-
[52]
The Thirteenth International Conference on Learning Representations , year=
PivotMesh: Generic 3D Mesh Generation via Pivot Vertices Guidance , author=. The Thirteenth International Conference on Learning Representations , year=
-
[53]
2024 IEEE International Conference on Image Processing (ICIP) , pages=
Towards unifying anatomy segmentation: Automated generation of a full-body ct dataset , author=. 2024 IEEE International Conference on Image Processing (ICIP) , pages=. 2024 , organization=
2024
-
[54]
Scientific Data , volume=
A whole-body FDG-PET/CT dataset with manually annotated tumor lesions , author=. Scientific Data , volume=. 2022 , publisher=
2022
-
[55]
Sheldon, George F. and Ricketts, Thomas C. and Charles, Anthony and King, Jennifer and Fraher, Erin P. and Meyer, Anthony , year =. The. Advances in Surgery , volume =. doi:10.1016/j.yasu.2008.04.006 , urldate =
-
[56]
Yancik, Rosemary and Ries, Lynn A. G. , year =. Hematology/Oncology Clinics of North America , volume =. doi:10.1016/S0889-8588(05)70275-6 , urldate =
-
[57]
Anaesthesia , volume=
Surgery in patients aged≥ 80 years: mortality and recovery in a nationwide cohort study , author=. Anaesthesia , volume=. 2025 , publisher=
2025
-
[58]
Journal of British Surgery , volume=
Age of patients undergoing surgery , author=. Journal of British Surgery , volume=. 2019 , publisher=
2019
-
[59]
Trends in Rural-Urban Disparities among Surgical Specialties Treating Cancer, 2004-2017 , author =. 2022 , journal =. doi:10.1111/jrh.12658 , urldate =
-
[60]
BOSS: Bones, organs and skin shape model , journal =
Karthik Shetty and Annette Birkhold and Srikrishna Jaganathan and Norbert Strobel and Bernhard Egger and Markus Kowarschik and Andreas Maier , keywords =. BOSS: Bones, organs and skin shape model , journal =. 2023 , issn =. doi:https://doi.org/10.1016/j.compbiomed.2023.107383 , url =
-
[61]
The Journal of Clinical Endocrinology & Metabolism , volume=
Obesity, metabolic syndrome, and cardiovascular disease , author=. The Journal of Clinical Endocrinology & Metabolism , volume=. 2004 , publisher=
2004
-
[62]
and Pujades, Sergi , title =
Keller, Marilyn and Arora, Vaibhav and Dakri, Abdelmouttaleb and Chandhok, Shivam and Machann, J\"urgen and Fritsche, Andreas and Black, Michael J. and Pujades, Sergi , title =. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) , month =. 2024 , pages =
2024
-
[63]
and Pujades, Sergi , booktitle =
Keller, Marilyn and Zuffi, Silvia and Black, Michael J. and Pujades, Sergi , booktitle =. 2022 , month_numeric =
2022
-
[64]
, title =
Loper, Matthew and Mahmood, Naureen and Romero, Javier and Pons-Moll, Gerard and Black, Michael J. , title =. ACM Trans. Graphics (Proc. SIGGRAPH Asia) , month = oct, number =
-
[65]
Pavlakos, Georgios and Choutas, Vasileios and Ghorbani, Nima and Bolkart, Timo and Osman, Ahmed A. A. and Tzionas, Dimitrios and Black, Michael J. , booktitle =. Expressive Body Capture:
-
[66]
arXiv preprint arXiv:2511.03589 , year=
Human Mesh Modeling for Anny Body , author=. arXiv preprint arXiv:2511.03589 , year=
-
[67]
Annual Review of Control, Robotics, and Autonomous Systems , volume =
Bi, Yuan and Jiang, Zhongliang and Duelmer, Felix and Huang, Dianye and Navab, Nassir , title =. Annual Review of Control, Robotics, and Autonomous Systems , volume =. 2024 , doi =
2024
-
[68]
Medical Image Computing and Computer Assisted Intervention--MICCAI 2018: 21st International Conference, Granada, Spain, September 16-20, 2018, Proceedings, Part IV 11 , pages=
Soft-body registration of pre-operative 3d models to intra-operative RGBD partial body scans , author=. Medical Image Computing and Computer Assisted Intervention--MICCAI 2018: 21st International Conference, Granada, Spain, September 16-20, 2018, Proceedings, Part IV 11 , pages=. 2018 , organization=
2018
-
[69]
3D Inference of the Scoliotic Spine from Depth Maps of the Back
Comte, Nicolas and Pujades, Sergi and Courvoisier, Aur \'e lien and Daniel, Olivier and Franco, Jean-S \'e bastien and Faure, Fran c ois and Boyer, Edmond. 3D Inference of the Scoliotic Spine from Depth Maps of the Back. Computer Methods in Biomechanics and Biomedical Engineering II. 2024
2024
-
[70]
International Symposium on Biomedical Simulation , pages=
Automatic alignment of pre and intraoperative data using anatomical landmarks for augmented laparoscopic liver surgery , author=. International Symposium on Biomedical Simulation , pages=. 2014 , organization=
2014
-
[71]
Medical Imaging 2007: Visualization and Image-Guided Procedures , volume=
Atlas-based method for model updating in image-guided liver surgery , author=. Medical Imaging 2007: Visualization and Image-Guided Procedures , volume=. 2007 , organization=
2007
-
[72]
Yonsei medical journal , volume=
Evaluation of the surgical margin threshold for avoiding recurrence after partial nephrectomy in patients with renal cell carcinoma , author=. Yonsei medical journal , volume=
-
[73]
International Journal of Computer Assisted Radiology and Surgery , volume=
Global rigid registration of CT to video in laparoscopic liver surgery , author=. International Journal of Computer Assisted Radiology and Surgery , volume=. 2018 , publisher=
2018
-
[74]
Medical physics , volume=
Robust surface registration using salient anatomical features for image-guided liver surgery: algorithm and validation , author=. Medical physics , volume=. 2008 , publisher=
2008
-
[75]
Schneider, C. and Thompson, S. and Totz, J. and Song, Y. and Allam, M. and Sodergren, M. H. and Desjardins, A. E. and Barratt, D. and Ourselin, S. and Gurusamy, K. and Stoyanov, D. and Clarkson, M. J. and Hawkes, D. J. and Davidson, B. R. , title=. Surgical Endoscopy , year=. doi:10.1007/s00464-020-07807-x , url=
-
[76]
IEEE transactions on pattern analysis and machine intelligence , volume=
Go-ICP: A globally optimal solution to 3D ICP point-set registration , author=. IEEE transactions on pattern analysis and machine intelligence , volume=. 2015 , publisher=
2015
-
[77]
Augmented reality navigation for liver resection with a stereoscopic laparoscope , journal =
Huoling Luo and Dalong Yin and Shugeng Zhang and Deqiang Xiao and Baochun He and Fanzheng Meng and Yanfang Zhang and Wei Cai and Shenghao He and Wenyu Zhang and Qingmao Hu and Hongrui Guo and Shuhang Liang and Shuo Zhou and Shuxun Liu and Linmao Sun and Xiao Guo and Chihua Fang and Lianxin Liu and Fucang Jia , keywords =. Augmented reality navigation for ...
-
[78]
Medical image analysis , volume=
Fast elastic registration of soft tissues under large deformations , author=. Medical image analysis , volume=. 2018 , publisher=
2018
-
[79]
IEEE transactions on Visualization and Computer Graphics , volume=
Real-time elastic deformations of soft tissues for surgery simulation , author=. IEEE transactions on Visualization and Computer Graphics , volume=. 2002 , publisher=
2002
-
[80]
International Conference on Medical Image Computing and Computer-Assisted Intervention , pages=
Modeling and real-time simulation of a vascularized liver tissue , author=. International Conference on Medical Image Computing and Computer-Assisted Intervention , pages=. 2012 , organization=
2012
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.