Differential Geometric Conditions for Koopman Linearizability of Control-Affine Systems
Pith reviewed 2026-06-27 05:46 UTC · model grok-4.3
The pith
Differential geometric conditions on vector fields are necessary for Koopman linearizability of control-affine systems.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
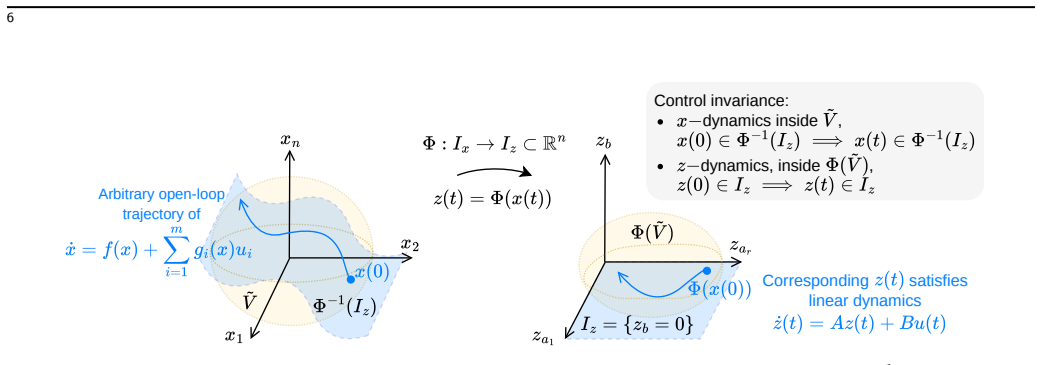
Differential geometric conditions on the drift and control vector fields must necessarily be satisfied for a Koopman linear transformation to exist. Together with an additional condition they become necessary and sufficient for Koopman linearizability to a controllable linear system. The same conditions are also shown to be sufficient for a slightly weaker notion of Koopman linearizability on control-invariant manifolds.
What carries the argument
Differential geometric conditions on the drift and control vector fields, involving Lie brackets and invariant distributions, that must hold for a Koopman linear transformation to exist.
If this is right
- Verification of Koopman linearizability reduces to checking geometric properties of the given vector fields.
- Control-affine systems whose autonomous dynamics are Koopman linearizable may fail to be linearizable once controls are included.
- Koopman linearizability to controllable linear systems is fully characterized by the geometric conditions plus one extra requirement.
- Linear methods can be used for control after lifting precisely when these conditions hold.
Where Pith is reading between the lines
- These conditions could classify families of control-affine systems that admit finite Koopman representations.
- Similar geometric tests might apply to other classes of nonlinear systems.
- Computing Lie brackets on specific models would allow direct practical checks of the conditions.
Load-bearing premise
The system is control-affine with vector fields smooth enough for Lie brackets and distributions to be defined without singularities.
What would settle it
A control-affine system whose vector fields violate the stated differential geometric conditions but still admits a finite-dimensional Koopman linear transformation to a linear system would falsify the necessity result.
Figures
read the original abstract
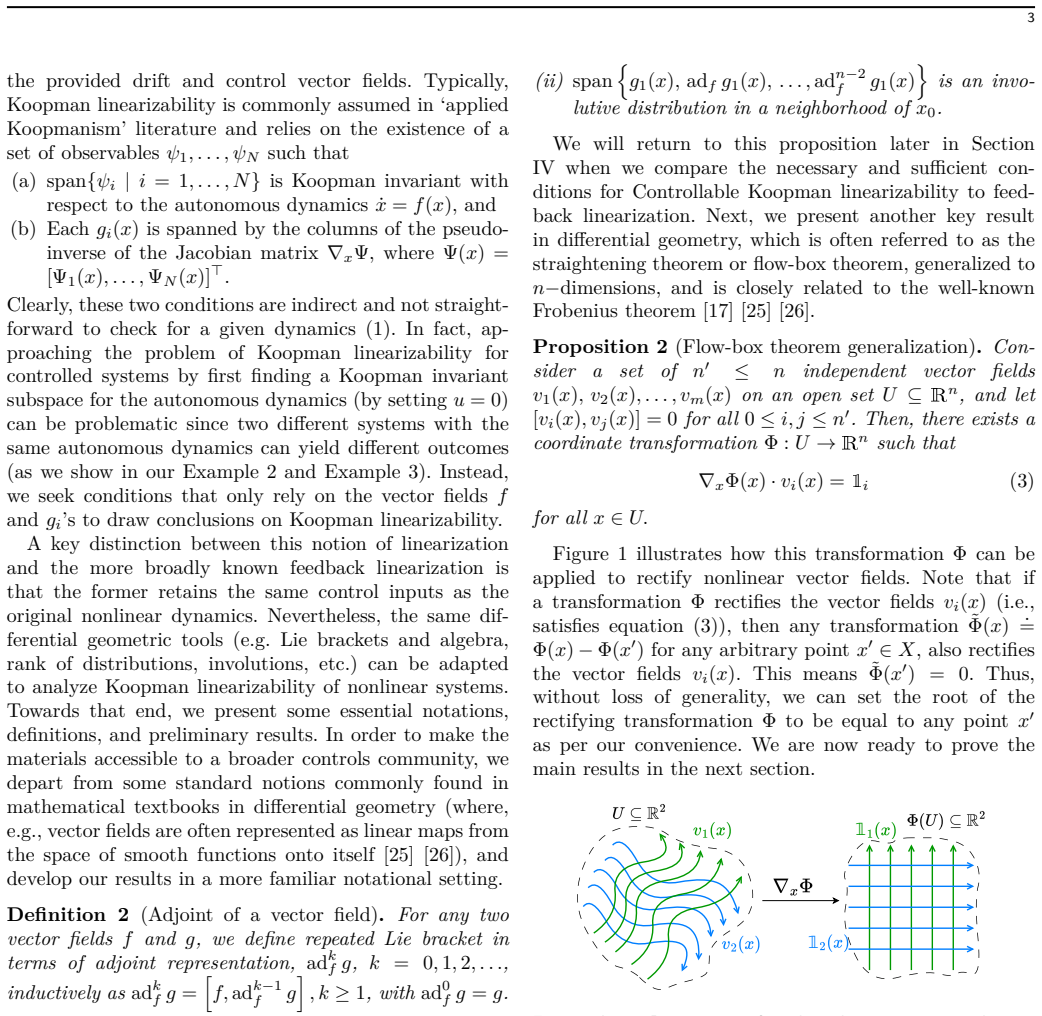
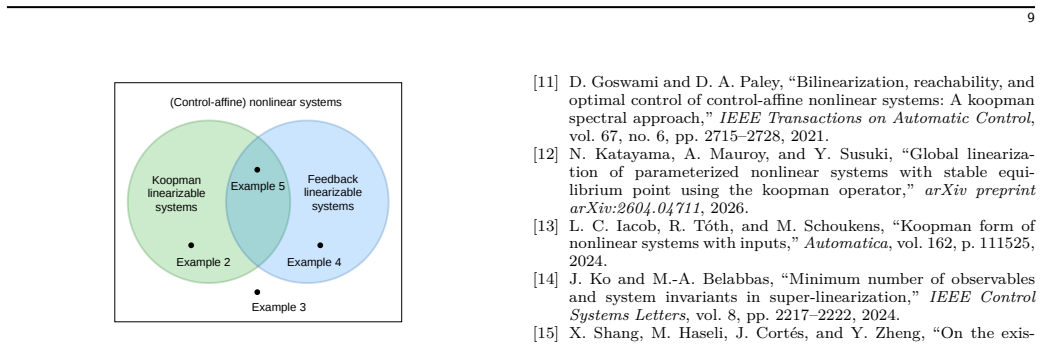
Koopman linearization opens many possibilities for control synthesis and analysis of nonlinear systems. Whether or not any given nonlinear control system admits a finite-dimensional Koopman representation remains a crucial question to address. A related problem is to categorize the class of all Koopman linearizable nonlinear control systems. In this work, we present differential geometric conditions on the drift and control vector fields of a control-affine nonlinear system, that must be necessarily satisfied for Koopman linear transformation to exist. The same conditions are also shown to be sufficient for (a slightly weaker notion of) Koopman linearizability on control-invariant manifolds. Further, these conditions, together with an additional condition, become necessary and sufficient for Koopman linearizability to a controllable linear system. Our examples illustrate the ease of checking these conditions, and also shed light on how Koopman linearizing transformation may not exist for a control-affine system even though one can linearize the autonomous part of the system via Koopman lifting.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript claims that specific differential-geometric conditions on the drift vector field f and control vector fields g_i of a control-affine system are necessary for the existence of a Koopman linear transformation. The same conditions are sufficient for a weaker notion of Koopman linearizability when the dynamics are restricted to control-invariant manifolds. Together with one further (unspecified in the abstract) condition, they become necessary and sufficient for Koopman linearizability to a controllable linear system. Examples are given to show that the conditions can be checked directly and that autonomous Koopman linearizability does not imply control-affine Koopman linearizability.
Significance. If the stated conditions are rigorously derived and the additional condition is made explicit and independent, the result would supply a concrete geometric test for membership in the class of control-affine systems that admit finite-dimensional Koopman representations. This would be useful for control synthesis, as it distinguishes systems for which a linear lifted representation exists from those that only linearize on invariant submanifolds. The manuscript correctly notes the distinction between the full and restricted settings.
major comments (3)
- [Abstract, §1] Abstract and §1: the additional condition that upgrades the stated geometric conditions from 'sufficient for the weaker manifold notion' to 'necessary and sufficient for linearizability to a controllable linear system' is never named or characterized. Without an explicit statement of this condition (in terms of Lie brackets, distributions, or properties of the Koopman operator), the necessity-and-sufficiency claim cannot be verified.
- [Abstract] Abstract: the necessity claim is asserted without any derivation steps, counter-example, or reference to a theorem number. The manuscript must supply at least a sketch of why the geometric conditions on f and g_i are forced by the existence of a Koopman linearizing map, or the necessity direction remains unsupported.
- [Abstract] The manuscript states that the conditions are only sufficient for the weaker notion on control-invariant manifolds, yet the central claim invokes an 'additional condition' to remove the manifold restriction. It is unclear whether this additional condition eliminates singularities or topological obstructions on the full domain; a concrete statement and a proof that the lifted dynamics remain linear everywhere are required.
minor comments (1)
- [Abstract] The abstract refers to 'a slightly weaker notion of Koopman linearizability'; this phrase should be replaced by a precise definition (e.g., existence of a linear Koopman operator only on the invariant manifold) at first use.
Simulated Author's Rebuttal
We thank the referee for the careful reading and constructive comments. We agree that the abstract requires clarification on the additional condition and the necessity claim, and will revise accordingly. Point-by-point responses follow.
read point-by-point responses
-
Referee: [Abstract, §1] Abstract and §1: the additional condition that upgrades the stated geometric conditions from 'sufficient for the weaker manifold notion' to 'necessary and sufficient for linearizability to a controllable linear system' is never named or characterized. Without an explicit statement of this condition (in terms of Lie brackets, distributions, or properties of the Koopman operator), the necessity-and-sufficiency claim cannot be verified.
Authors: We agree the abstract should name the condition explicitly. In the manuscript body the additional condition is controllability of the target linear system (Definition 3.1), which upgrades the result to necessity and sufficiency in Theorem 3.4. We will revise the abstract to read: 'these conditions, together with controllability of the linear target system, become necessary and sufficient for Koopman linearizability to a controllable linear system.' revision: yes
-
Referee: [Abstract] Abstract: the necessity claim is asserted without any derivation steps, counter-example, or reference to a theorem number. The manuscript must supply at least a sketch of why the geometric conditions on f and g_i are forced by the existence of a Koopman linearizing map, or the necessity direction remains unsupported.
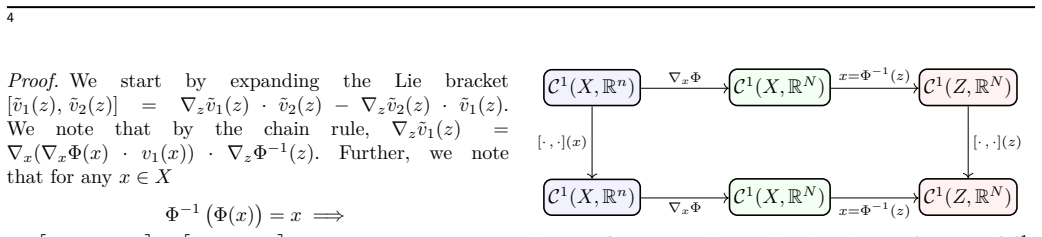
Authors: The necessity is established in Theorem 2.2: if a diffeomorphism Φ exists such that the lifted vector fields are linear, then the Lie bracket relations [f, g_i] = sum a_{ij} g_j must hold because Φ_* preserves the linear structure, forcing the stated involutivity and rank conditions on the distributions. We will add the parenthetical '(see Theorem 2.2)' to the necessity sentence in the abstract and a one-sentence outline of this argument in §1. revision: yes
-
Referee: [Abstract] The manuscript states that the conditions are only sufficient for the weaker notion on control-invariant manifolds, yet the central claim invokes an 'additional condition' to remove the manifold restriction. It is unclear whether this additional condition eliminates singularities or topological obstructions on the full domain; a concrete statement and a proof that the lifted dynamics remain linear everywhere are required.
Authors: Controllability of the target ensures the control distribution has full rank, so the only control-invariant manifold is the entire domain and no singularities arise in the global chart. Theorem 4.1 proves the lifted dynamics are linear everywhere under this condition by showing the Koopman operator commutes with the flows without restriction to submanifolds. We will add a clarifying sentence in the abstract and a short remark after Theorem 3.4 explaining the global validity. revision: yes
Circularity Check
No circularity; conditions derived from independent differential-geometric properties of vector fields
full rationale
The derivation applies standard Lie bracket and distribution tools from differential geometry to the drift f and control fields g_i of a control-affine system. These properties are defined without reference to the Koopman operator or its eigenfunctions, and the necessity claim follows directly from the requirement that the lifted dynamics be linear. The additional condition for full linearizability to a controllable system is stated separately and is not shown to be constructed from the geometric conditions themselves. No self-citations, fitted parameters renamed as predictions, or ansatzes imported via prior work appear in the provided abstract or skeptic summary. The result is therefore self-contained against external benchmarks in nonlinear control theory.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption The state space is a smooth manifold and the vector fields are C^infty
Reference graph
Works this paper leans on
-
[1]
Forecast- ing sequential data using consistent koopman autoencoders,
O. Azencot, N. B. Erichson, V. Lin, and M. Mahoney, “Forecast- ing sequential data using consistent koopman autoencoders,” in International conference on machine learning , pp. 475–485, PMLR, 2020
2020
-
[2]
Time-to-reach bounds for verification of dynamical systems using the koopman spectrum,
J. Ding and S. A. Deka, “Time-to-reach bounds for verification of dynamical systems using the koopman spectrum,” arXiv preprint arXiv:2411.05554, 2024
-
[3]
Koopman-based neural lyapunov functions for general attractors,
S. A. Deka, A. M. Valle, and C. J. Tomlin, “Koopman-based neural lyapunov functions for general attractors,” in 2022 IEEE 61st Conference on Decision and Control (CDC) , pp. 5123– 5128, IEEE, 2022
2022
-
[4]
Linear predictors for nonlinear dynami- cal systems: Koopman operator meets model predictive control,
M. Korda and I. Mezić, “Linear predictors for nonlinear dynami- cal systems: Koopman operator meets model predictive control,” Automatica, vol. 93, pp. 149–160, 2018
2018
-
[5]
Koopman operator, geometry, and learning of dynam- ical systems,
I. Mezić, “Koopman operator, geometry, and learning of dynam- ical systems,” Not. Am. Math. Soc, vol. 68, no. 7, pp. 1087–1105, 2021
2021
-
[6]
Linearizability of flows by embeddings,
M. D. Kvalheim and P. Arathoon, “Linearizability of flows by embeddings,” Selecta Mathematica, vol. 32, no. 2, p. 38, 2026
2026
-
[7]
Properties of immersions for systems with multiple limit sets with implications to learning koopman embeddings,
Z. Liu, N. Ozay, and E. D. Sontag, “Properties of immersions for systems with multiple limit sets with implications to learning koopman embeddings,” Automatica, vol. 176, p. 112226, 2025
2025
-
[8]
A sufficient condition for the super-linearization of polynomial systems,
M.-A. Belabbas and X. Chen, “A sufficient condition for the super-linearization of polynomial systems,” Systems & Control Letters, vol. 179, p. 105588, 2023
2023
-
[9]
Two roads to koopman op- erator theory for control: Infinite input sequences and operator families,
M. Haseli, I. Mezić, and J. Cortés, “Two roads to koopman op- erator theory for control: Infinite input sequences and operator families,” arXiv preprint arXiv:2510.15166 , 2025
-
[10]
Modeling nonlinear control systems via koopman control family: Universal forms and subspace invariance proximity,
M. Haseli and J. Cortés, “Modeling nonlinear control systems via koopman control family: Universal forms and subspace invariance proximity,” Automatica, vol. 185, p. 112722, 2026
2026
-
[11]
Bilinearization, reachability, and optimal control of control-affine nonlinear systems: A koopman spectral approach,
D. Goswami and D. A. Paley, “Bilinearization, reachability, and optimal control of control-affine nonlinear systems: A koopman spectral approach,” IEEE Transactions on Automatic Control , vol. 67, no. 6, pp. 2715–2728, 2021
2021
-
[12]
N. Katayama, A. Mauroy, and Y. Susuki, “Global lineariza- tion of parameterized nonlinear systems with stable equi- librium point using the koopman operator,” arXiv preprint arXiv:2604.04711, 2026
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[13]
Koopman form of nonlinear systems with inputs,
L. C. Iacob, R. Tóth, and M. Schoukens, “Koopman form of nonlinear systems with inputs,” Automatica, vol. 162, p. 111525, 2024
2024
-
[14]
Minimum number of observables and system invariants in super-linearization,
J. Ko and M.-A. Belabbas, “Minimum number of observables and system invariants in super-linearization,” IEEE Control Systems Letters, vol. 8, pp. 2217–2222, 2024
2024
-
[15]
On the exis- tence of koopman linear embeddings for controlled nonlinear systems,
X. Shang, M. Haseli, J. Cortés, and Y. Zheng, “On the exis- tence of koopman linear embeddings for controlled nonlinear systems,” arXiv preprint arXiv:2602.14537 , 2026
-
[16]
An overview of koopman-based control: From error bounds to closed-loop guarantees,
R. Strässer, K. Worthmann, I. Mezić, J. Berberich, M. Schaller, and F. Allgöwer, “An overview of koopman-based control: From error bounds to closed-loop guarantees,” Annual Reviews in Control, vol. 61, p. 101035, 2026
2026
-
[17]
Nijmeijer and A
H. Nijmeijer and A. van der Schaft, Nonlinear Dynamical Con- trol Systems. Springer, New York, NY, 1990
1990
-
[18]
On the equivalence of control systems and the linearization of nonlinear systems,
A. J. Krener, “On the equivalence of control systems and the linearization of nonlinear systems,” SIAM Journal on Control , vol. 11, no. 4, pp. 670–676, 1973
1973
-
[19]
Feedback Invariants for Nonlinear Systems,
R. Brockett, “Feedback Invariants for Nonlinear Systems,” IF AC Proceedings Volumes, vol. 11, pp. 1115–1120, 1 1978
1978
-
[20]
Global Transformations of Nonlinear Systems,
L. R. Hunt, R. Su, and G. Meyer, “Global Transformations of Nonlinear Systems,” IEEE Transactions on Automatic Control , vol. 28, no. 1, pp. 24–31, 1983
1983
-
[21]
Some comments on global linearization of nonlinear systems,
W. M. Boothby, “Some comments on global linearization of nonlinear systems,” Systems & Control Letters , vol. 4, pp. 143– 147, 5 1984
1984
-
[22]
Geometric methods in linearization of control systems,
W. Respondek, “Geometric methods in linearization of control systems,” Banach Center Publications , vol. 1, no. 14, pp. 453– 467, 1985
1985
-
[23]
Global External Lin- earization of Nonlinear Systems Via Feedback,
D. Cheng, T. J. Tarn, and A. Isedori, “Global External Lin- earization of Nonlinear Systems Via Feedback,” IEEE Transac- tions on Automatic Control , vol. 30, no. 8, pp. 808–811, 1985
1985
-
[24]
Exact linearization of nonlinear systems with outputs,
D. Cheng, A. Isidori, W. Respondek, and T. J. Tarn, “Exact linearization of nonlinear systems with outputs,” Mathematical Systems Theory, vol. 21, pp. 63–83, 12 1988
1988
-
[25]
Introduction to smooth manifolds,
J. M. Lee, “Introduction to smooth manifolds,” in Graduate Texts in Mathematics , Springer, 2012
2012
-
[26]
P. J. Olver, Applications of Lie groups to differential equations , vol. 107. Springer Science & Business Media, 1993
1993
-
[27]
Isidori, Nonlinear Control Systems
A. Isidori, Nonlinear Control Systems. Springer London, 3rd ed., 1995
1995
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.