Semiglobal Input-Delay Tolerance Algorithm for Distributed Nonconvex Optimization of Networked Nonlinear Systems
Pith reviewed 2026-06-26 16:38 UTC · model grok-4.3
The pith
A semiglobal algorithm ensures convergence to the optimizer in networked nonlinear systems despite input delays and nonconvex costs.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The SIDT algorithm practically achieves input-delay tolerant semiglobal convergence for distributed optimization of networked nonlinear systems. For every prescribed compact initial set an admissible delay bound exists under which consensus is preserved and all states converge to the optimizer; the Polyak-Łojasiewicz condition removes the need for strict convexity and thereby covers nonconvex cases.
What carries the argument
The SIDT algorithm, constructed through hierarchical design and input-to-state stability analysis to decouple input delays from nonlinear dynamics.
If this is right
- Consensus and convergence hold inside any chosen compact initial set once the delay is below its admissible bound.
- The Polyak-Łojasiewicz condition replaces strict convexity and thereby covers a wider class of nonconvex distributed problems.
- The same hierarchical design and input-to-state stability argument applies uniformly to the coupled delay-dynamics setting.
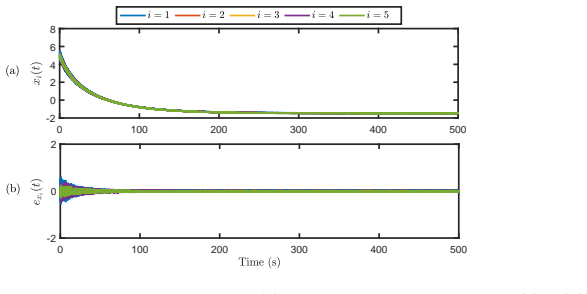
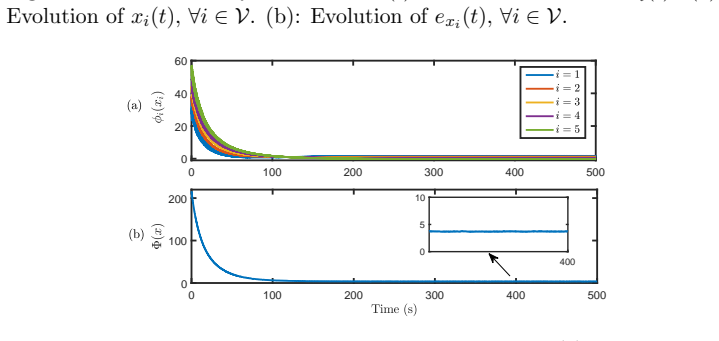
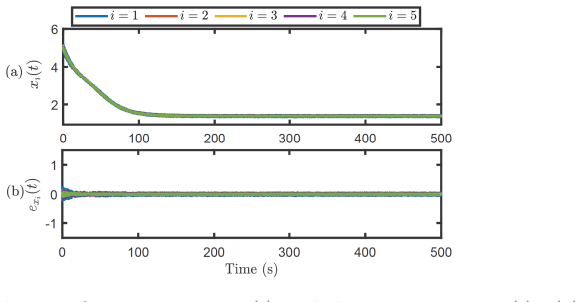
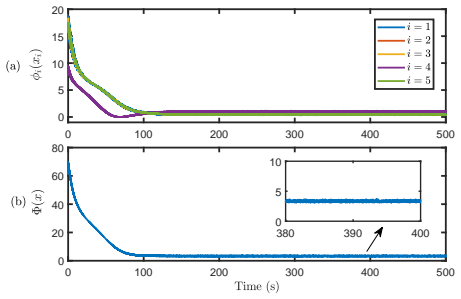
- Numerical simulations on nonlinear networks with delays match the predicted semiglobal behavior.
Where Pith is reading between the lines
- The semiglobal framing leaves open whether a single delay bound can work for unbounded initial sets under additional growth conditions.
- The same construction might adapt to time-varying or stochastic delays if the input-to-state stability margins remain uniform.
- The approach could link to event-triggered or quantized communication versions of the same problem.
Load-bearing premise
For every prescribed compact initial set there exists a finite admissible delay bound that keeps consensus and drives all states to the optimizer.
What would settle it
A specific networked nonlinear system with input delays, a compact initial set, and a delay value inside the claimed admissible bound for which the SIDT algorithm fails to reach consensus or the optimizer.
Figures
read the original abstract
This paper studies a class of distributed optimization problems in networked nonlinear systems (NNSs) subject to input delays and consensus constraints. It introduces input-delay tolerant semiglobal convergence (IDTSC), meaning that for any prescribed compact initial set there exists an admissible delay bound under which the optimal solution is computed within consensus constraints and all node states converge to the solution. Building on a hierarchical design and input-to-state stability analysis, a new semiglobal input-delay tolerant (SIDT) algorithm is developed that practically achieves IDTSC for distributed optimization under the coupling between input delays and nonlinear dynamics. Further, by relaxing strict convexity requirements through the Polyak-{\L}ojasiewicz condition, the SIDT algorithm broadens its applicability to nonconvex optimization. Finally, numerical experiments corroborate the theory on NNSs with input delays.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript develops a semiglobal input-delay tolerant (SIDT) algorithm for distributed optimization over networked nonlinear systems subject to input delays and consensus constraints. It introduces the notion of input-delay tolerant semiglobal convergence (IDTSC), whereby for any prescribed compact initial set an admissible delay bound exists such that consensus is preserved and all states converge to the optimizer. The construction relies on a hierarchical design combined with input-to-state stability (ISS) small-gain arguments; the Polyak-Łojasiewicz condition is invoked to extend the result beyond strict convexity to nonconvex costs. Numerical experiments on delayed NNSs are presented to corroborate the theory.
Significance. If the central claims hold, the work supplies a concrete, semiglobal delay-tolerance result for a practically important class of distributed nonconvex problems on nonlinear dynamics. The explicit construction of admissible delay bounds via hierarchical ISS estimates, the relaxation of convexity via the PL inequality, and the absence of additional restrictions on delay distributions constitute genuine technical contributions to the networked optimization literature. The numerical corroboration further supports applicability.
minor comments (3)
- [§4.2] §4.2, Assumption 3: the statement that the PL constant is 'uniform over the compact set' should be accompanied by an explicit dependence on the radius of the initial set to make the semiglobal character fully transparent.
- [Figure 5] Figure 5: the plotted trajectories do not include the admissible delay bound derived in Theorem 2; overlaying this threshold would strengthen the visual link between theory and simulation.
- [Theorem 1] The proof of Theorem 1 invokes a standard small-gain lemma but does not cite the precise version (e.g., the form in Khalil or Dashkovskiy et al.); adding the reference would improve traceability.
Simulated Author's Rebuttal
We thank the referee for the positive evaluation of our work on the SIDT algorithm and the recommendation of minor revision. The assessment correctly identifies the key contributions regarding input-delay tolerant semiglobal convergence (IDTSC), the hierarchical ISS-based design, and the use of the Polyak-Łojasiewicz condition to handle nonconvex costs. No major comments were provided in the report.
Circularity Check
No significant circularity; derivation self-contained via standard ISS/hierarchical arguments
full rationale
The paper constructs the SIDT algorithm via hierarchical design followed by input-to-state stability (ISS) estimates to obtain an explicit admissible delay bound for any prescribed compact initial set. This is a standard small-gain/ISS construction once local controllers are fixed; the Polyak-Łojasiewicz relaxation is an explicit assumption imported from the literature rather than derived from the algorithm itself. No equation reduces a claimed prediction to a fitted parameter by construction, no uniqueness theorem is imported solely via self-citation, and no ansatz is smuggled through prior work. The central existence claim for the delay bound is therefore independent of the target result and does not collapse to a definition or self-referential fit.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Input-to-state stability properties hold for the closed-loop networked nonlinear dynamics under the proposed controller
- domain assumption The objective functions satisfy the Polyak-Łojasiewicz condition
Reference graph
Works this paper leans on
-
[1]
Asymptotically optimal decentralized control for large population stochastic multiagent systems,
Li, T., and Zhang, J. F. “Asymptotically optimal decentralized control for large population stochastic multiagent systems,”IEEE Transactions on Automatic Control, vol. 53, no. 7, pp. 1643-1660, 2008
2008
-
[2]
Distributed optimization for control,
Nedi´ c, A., and Liu, J. “Distributed optimization for control,”Annual Review of Control, Robotics, and Autonomous Systems, vol. 1, no. 1, pp. 77-103, 2018
2018
-
[3]
Non-convex distributed optimization,
Tatarenko, T., and Touri, B. “Non-convex distributed optimization,”IEEE Transactions on Automatic Control, vol. 62, no. 8, pp. 3744-3757, 2017
2017
-
[4]
Tailoring gradient methods for differentially private distributed optimization,
Wang, Y., and Nedi´ c, A. “Tailoring gradient methods for differentially private distributed optimization,”IEEE Transactions on Automatic Control, vol. 69, no. 2, pp. 872-887, 2023
2023
-
[5]
LQ synchronization of discrete-time multiagent systems: A distributed optimization approach,
Wang, Q., Duan, Z., Wang, J., and Chen, G. (2019). “LQ synchronization of discrete-time multiagent systems: A distributed optimization approach,”IEEE Transactions on Automatic Control, vol. 64, no. 12, pp. 5183-5190, 2019
2019
-
[6]
An augmented Lagrangian based algo- rithm for distributed nonconvex optimization,
Houska, B., Frasch, J., and Diehl, M. “An augmented Lagrangian based algo- rithm for distributed nonconvex optimization,”SIAM Journal on Optimiza- tion, vol. 26, no. 2, pp. 1101-1127, 2016
2016
-
[7]
Distributed nonconvex optimization with event-triggered communication,
Xu, L., Yi, X., Shi, Y., Johansson, K. H., Chai, T., and Yang, T. “Distributed nonconvex optimization with event-triggered communication,”IEEE Transac- tions on Automatic Control, DOI: 10.1109/TAC.2023.3339439, 2023
-
[8]
Finite-time distributed economic dis- patch over network systems with coupled local costs,
Firouzbahrami, M., and Nobakhti, A. “Finite-time distributed economic dis- patch over network systems with coupled local costs,”IEEE Control Systems Letters, vol. 7, pp. 325-330, 2022
2022
-
[9]
Distributed optimization in sensor networks,
Rabbat, M., and Nowak, R. “Distributed optimization in sensor networks,”In Proceedings of the 3rd international symposium on Information processing in sensor networks, pp. 20-27, 2004, April
2004
-
[10]
Weighted optimization-based dis- tributed Kalman filter for nonlinear target tracking in collaborative sensor networks,
Chen, J., Li, J., Yang, S., and Deng, F. “Weighted optimization-based dis- tributed Kalman filter for nonlinear target tracking in collaborative sensor networks,”IEEE Transactions on Cybernetics, vol. 47, no. 11, pp. 3892-3905, 2016
2016
-
[11]
Distributed gradient methods for convex machine learning problems in networks: Distributed optimization,
Nedic, A. “Distributed gradient methods for convex machine learning problems in networks: Distributed optimization,”IEEE Signal Processing Magazine, vol. 37, no. 3, pp. 92-101, 2020
2020
-
[12]
Non-cooperative decentralized charging of homo- geneous households’ batteries in a smart grid,
C. O. Adika, and L. Wang, “Non-cooperative decentralized charging of homo- geneous households’ batteries in a smart grid,”IEEE Transactions on Smart Grid, vol. 5, no. 4, pp. 1855-1863, 2014. 33
2014
-
[13]
Economic power dispatch in smart grids: a framework for distributed optimization and consensus dynamics,
Yu, W., Li, C., Yu, X., Wen, G., and L¨ u, J. “Economic power dispatch in smart grids: a framework for distributed optimization and consensus dynamics,” Science China Information Sciences, vol. 61, pp. 1-16, 2018
2018
-
[14]
A survey of dis- tributed optimization methods for multi-robot systems,
Halsted, T., Shorinwa, O., Yu, J., and Schwager, M. “A survey of dis- tributed optimization methods for multi-robot systems,”arxiv preprint arxiv:2103.12840, 2021
arXiv 2021
-
[15]
Liang, C. D., Ge, M. F., Liu, Z. W., Gu, Z. W., and Chen, Q. “Distributed predefined-time optimization control for networked marine surface vehicles subject to set constraints,”IEEE Transactions on Intelligent Transportation Systems, DOI: 10.1109/TITS.2023.3314800
-
[16]
Distributed optimization of nonlinear multiagent systems: A small-gain approach,
Liu, T., Qin, Z., Hong, Y., and Jiang, Z. P. “Distributed optimization of nonlinear multiagent systems: A small-gain approach,”IEEE Transactions on Automatic Control, vol. 67, no. 2, pp. 676-691, 2021
2021
-
[17]
Distributed optimization for a class of non- linear multiagent systems with disturbance rejection,
Wang, X., Hong, Y., and Ji, H. “Distributed optimization for a class of non- linear multiagent systems with disturbance rejection,”IEEE Transactions on Cybernetics, vol. 46 no. 7, pp. 1655-1666, 2015
2015
-
[18]
A cerebellar-based solution to the nondeterministic time delay problem in robotic control,
Abad´ ıa, I., Naveros, F., Ros, E., Carrillo, R. R., and Luque, N. R. (2021). “A cerebellar-based solution to the nondeterministic time delay problem in robotic control,”Science Robotics, vol. 6, no. 58, pp. eabf2756, 2021
2021
-
[19]
Robust control of robot manipulators using inclusive and enhanced time delay control,
Jin, M., Kang, S. H., Chang, P. H., and Lee, J. “Robust control of robot manipulators using inclusive and enhanced time delay control,”IEEE/ASME Transactions on Mechatronics, vol. 22, no. 5, pp. 2141-2152, 2017
2017
-
[20]
Time-delay analysis of wide-area voltage control considering smart grid contingences in a real-time environment,
Musleh, A. S., Muyeen, S. M., Al-Durra, A., Kamwa, I., Masoum, M. A., and Islam, S. “Time-delay analysis of wide-area voltage control considering smart grid contingences in a real-time environment,”IEEE Transactions on Industrial Informatics, vol. 14, no. 3, pp. 1242-1252, 2018
2018
-
[21]
Input delay tolerance of nonlinear systems under smooth feedback: A semiglobal control framework,
Wang, Y., and Lin, W. “Input delay tolerance of nonlinear systems under smooth feedback: A semiglobal control framework,”IEEE Transactions on Automatic Control, vol. 67, no. 1, pp. 146-161, 2020
2020
-
[22]
Distributed optimization based on a multia- gent system in the presence of communication delays,
Yang, S., Liu, Q., and Wang, J. “Distributed optimization based on a multia- gent system in the presence of communication delays,”IEEE Transactions on Systems, Man, and Cybernetics: Systems, vol. 47, no. 5, pp. 717-728, 2016
2016
-
[23]
Distributed optimization for multi-agent systems with constraints set and communication time-delay over a directed graph,
Wang, D., Wang, Z., Chen, M., and Wang, W. “Distributed optimization for multi-agent systems with constraints set and communication time-delay over a directed graph,”Information Sciences, vol. 438, pp. 1-14, 2018
2018
-
[24]
Distributed multi-agent optimization subject to nonidentical constraints and communication delays,
Lin, P., Ren, W., and Song, Y. “Distributed multi-agent optimization subject to nonidentical constraints and communication delays,”Automatica, vol. 65, pp. 120-131, 2016. 34
2016
-
[25]
A dynamic path planning approach for multirobot sensor-based coverage considering energy constraints,
Yazici, A., Kirlik, G., Parlaktuna, O., and Sipahioglu, A. “A dynamic path planning approach for multirobot sensor-based coverage considering energy constraints,”IEEE Transactions on Cybernetics, vol. 44, no. 3, pp. 305-314, 2013
2013
-
[26]
Distributed gradient algorithm for constrained optimization with application to load sharing in power systems,
Yi, P., Hong, Y., and Liu, F. “Distributed gradient algorithm for constrained optimization with application to load sharing in power systems,”Systems& Control Letters, vol. 83, pp. 45-52, 2015
2015
-
[27]
Distributed continuous-time convex optimiza- tion on weight-balanced digraphs,
Gharesifard, B., and Cort´ es, J. “Distributed continuous-time convex optimiza- tion on weight-balanced digraphs,”IEEE Transactions on Automatic Control, vol. 59, no. 3, pp. 781-786, 2013
2013
-
[28]
Distributed continuous-time algorithm for constrained convex optimizations via nonsmooth analysis approach,
Zeng, X., Yi, P., and Hong, Y. “Distributed continuous-time algorithm for constrained convex optimizations via nonsmooth analysis approach,”IEEE Transactions on Automatic Control, vol. 62, no. 10, pp. 5227-5233, 2016
2016
-
[29]
Constrained consensus algorithms with fixed step size for distributed convex optimization over multiagent net- works,
Liu, Q., Yang, S., and Hong, Y. (2017). “Constrained consensus algorithms with fixed step size for distributed convex optimization over multiagent net- works,”IEEE Transactions on Automatic Control, vol. 62, no. 8, pp. 4259- 4265, 2017
2017
-
[30]
Stability analysis of distributed convex optimization under persistent attacks: A hybrid systems approach,
Wang, X. F., Teel, A. R., Liu, K. Z., and Sun, X. M. “Stability analysis of distributed convex optimization under persistent attacks: A hybrid systems approach,”Automatica, vol. 111, pp. 108607, 2020
2020
-
[31]
Distributed constrained optimal consensus of multi-agent systems,
Qiu, Z., Liu, S., and Xie, L. “Distributed constrained optimal consensus of multi-agent systems,”Automatica, vol. 68, pp. 209-215, 2016
2016
-
[32]
An asynchronous parallel stochastic coordinate descent algorithm,
Liu, J., Wright, S., R´ e, C., Bittorf, V., and Sridhar, S. “An asynchronous parallel stochastic coordinate descent algorithm,”In International Conference on Machine Learning (pp. 469-477). PMLR, 2014, June
2014
-
[33]
Linear convergence of first order methods for non-strongly convex optimization,
Necoara, I., Nesterov, Y., and Glineur, F. “Linear convergence of first order methods for non-strongly convex optimization,”Mathematical Programming, vol. 175, pp. 69-107, 2019
2019
-
[34]
RPROP: a fast adaptive learning algorithm,
Riedmiller, M., and Braun, H. “RPROP: a fast adaptive learning algorithm,” In Proc. of the Int. Symposium on Computer and Information Science VII, 1992, November
1992
-
[35]
Principles of mathematical analysis (3rd ed.),
Rudin, W. “Principles of mathematical analysis (3rd ed.),”McGraw-Hill, The- orem 3.9, p. 45, 1976
1976
-
[36]
Linear convergence of gradient and proximal-gradient methods under the Polyak- Lojasiewicz condition,
Karimi, H., Nutini, J., and Schmidt, M. “Linear convergence of gradient and proximal-gradient methods under the Polyak- Lojasiewicz condition,” In Ma- chine Learning and Knowledge Discovery in Databases: European Conference, ECML PKDD 2016, Riva del Garda, Italy, September 19-23, 2016, Proceed- ings, Part I 16 (pp. 795-811). Springer International Publish...
2016
-
[37]
Fixed-time gradient-based extremum seeking,
Poveda, J. I., and Krsti´ c, M. “Fixed-time gradient-based extremum seeking,” In 2020 American Control Conference (ACC), pp. 2838-2843. IEEE, 2020, July
2020
-
[38]
Stability of time-delay sys- tems,
Gu, K., Chen, J., and Kharitonov, V. L. (2003). “Stability of time-delay sys- tems,”Springer Science&Business Media
2003
-
[39]
Mathematical control theory: deterministic finite dimensional systems (Vol. 6),
Sontag, E. D. “Mathematical control theory: deterministic finite dimensional systems (Vol. 6),”Springer Science&Business Media, 2013
2013
-
[40]
Time-varying Razumikhin and Krasovskii sta- bility theorems for time-varying delay systems,
Zhou, B., and Egorov, A. V. “Time-varying Razumikhin and Krasovskii sta- bility theorems for time-varying delay systems,”In 2016 Chinese Control and Decision Conference (CCDC), pp. 1041-1046. IEEE, 2016, May. 36
2016
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.