Robust Data-Driven Nash Equilibrium Seeking under Partial-Decision Information
Pith reviewed 2026-06-26 07:17 UTC · model grok-4.3
The pith
Nash equilibrium controllers for multi-agent systems with unknown dynamics are synthesized directly from noisy data by recasting the problem as cooperative output regulation.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By reformulating decentralized Nash equilibrium seeking under partial-decision information and equality constraints as a cooperative output regulation problem, controllers can be synthesized directly from noisy input-state data via semi-definite programs, providing formal guarantees of closed-loop stability and asymptotic convergence to the Nash equilibrium for linear systems subject to exogenous disturbances, with an extension to a class of nonlinear systems via integral control and quadratic constraints.
What carries the argument
Reformulation of the Nash equilibrium seeking problem as a cooperative output regulation problem, followed by data-driven semi-definite program synthesis of controllers from noisy input-state measurements
If this is right
- Agents reach the Nash equilibrium with formal stability guarantees even when exact dynamics are unavailable.
- Partial-decision information and equality constraints are handled without requiring full communication among agents.
- Exogenous disturbances are rejected through the internal model while convergence is maintained.
- The same data-driven synthesis extends to nonlinear systems with constant disturbances using integral action and quadratic constraints.
Where Pith is reading between the lines
- The approach could reduce the need for system identification in environments where dynamics change over time.
- Similar reformulations might apply to other distributed game problems or optimization tasks in control.
- Validation on physical multi-agent hardware would test whether the noisy-data guarantees hold beyond simulation.
Load-bearing premise
The multi-agent system with unknown linear dynamics, exogenous disturbances, partial-decision information, and equality constraints can be validly recast as a cooperative output regulation problem for which data-driven SDP synthesis yields the required stability and convergence properties.
What would settle it
Apply the semi-definite program to noisy data collected from the system; if the resulting controller produces a closed-loop trajectory that does not converge asymptotically to the Nash equilibrium or loses stability under the modeled disturbances, the claim is falsified.
Figures


read the original abstract
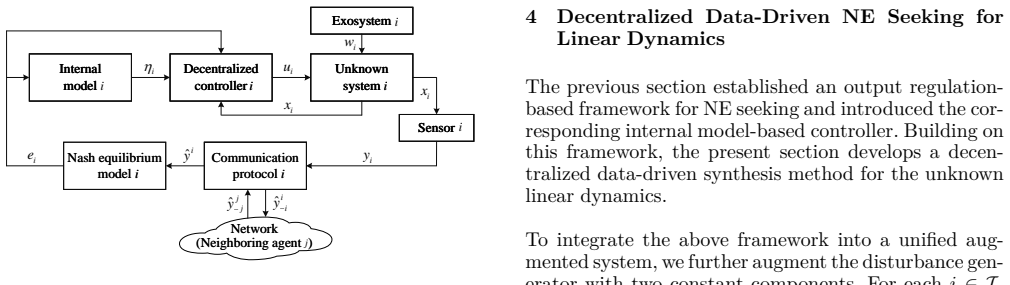
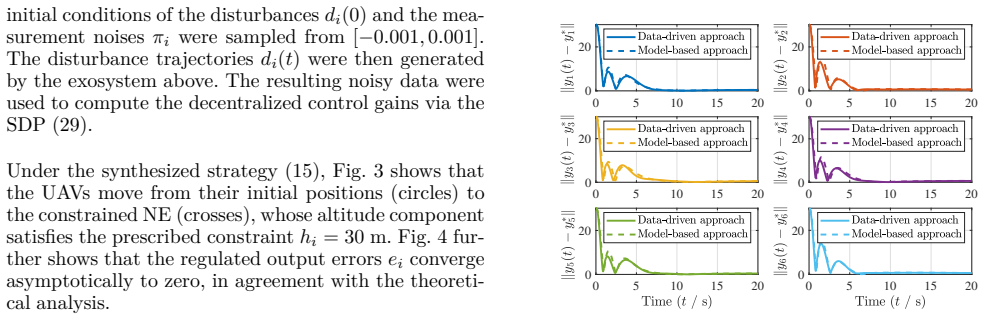
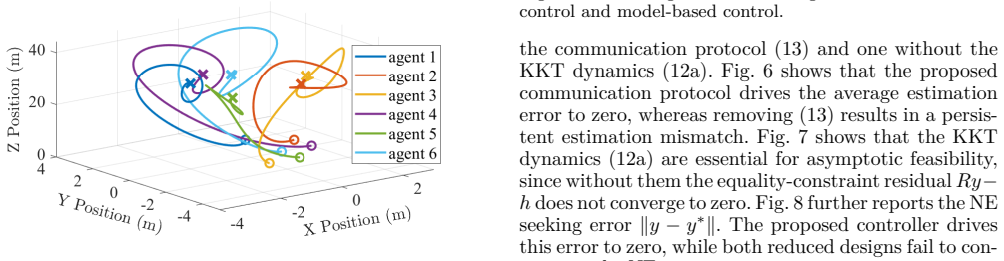
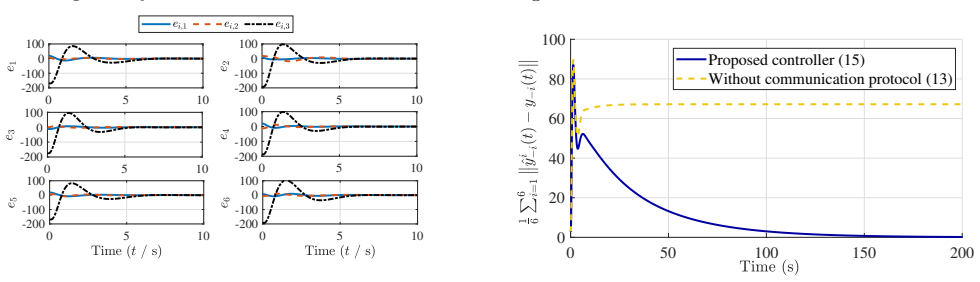
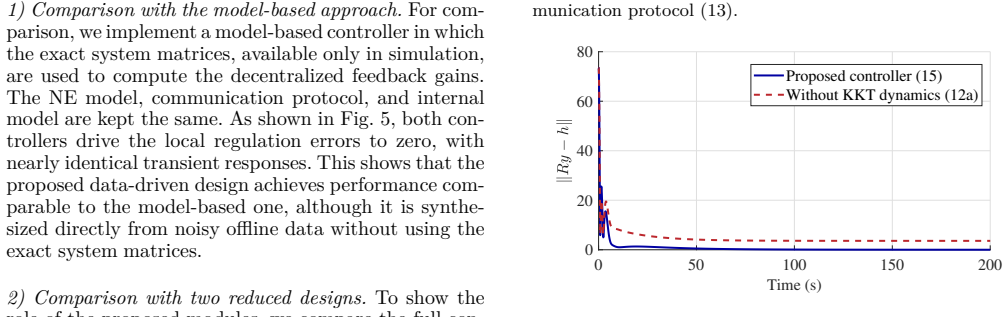
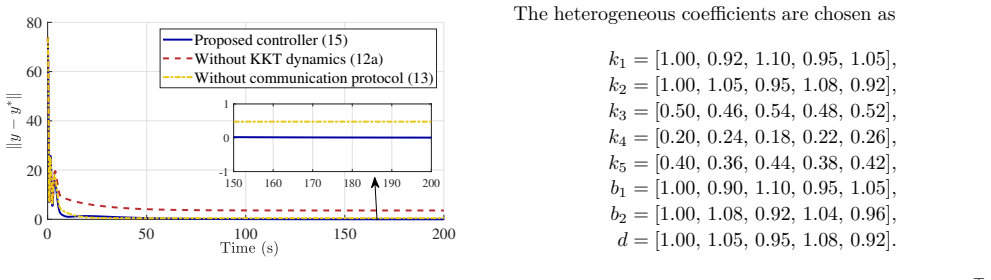
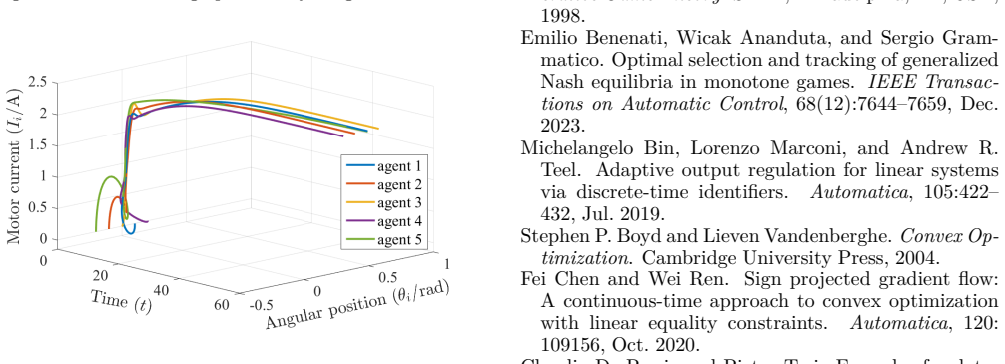
This paper presents a data-driven framework for decentralized Nash equilibrium (NE) seeking in multi-agent systems with unknown linear dynamics subject to exogenous disturbances, operating under partial-decision information (where agents lack direct access to the decisions of all others) and equality constraints. The proposed framework integrates an NE model, a distributed communication protocol, an internal model for disturbance rejection, and a data-driven stabilization strategy. By reformulating the problem as a cooperative output regulation problem, we synthesize controllers directly from noisy input-state data via semi-definite programs (SDPs), providing formal guarantees for closed-loop stability and asymptotic convergence to the NE. The approach is further extended to a class of nonlinear systems with constant disturbances by leveraging integral control and describing nonlinearities via quadratic constraints. Numerical simulations involving unmanned aerial vehicle networks and a rotary-wing aerial vehicle formation validate the efficacy and robustness of the proposed method.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims a data-driven framework for decentralized Nash equilibrium seeking in multi-agent systems with unknown linear dynamics, exogenous disturbances, partial-decision information, and equality constraints. It integrates an NE model, distributed protocol, internal model, and data-driven stabilization; reformulates the problem as cooperative output regulation; and synthesizes controllers from noisy input-state data via SDPs to guarantee closed-loop stability and asymptotic NE convergence. The approach extends to nonlinear systems with constant disturbances via integral control and quadratic constraints, with validation on UAV networks and rotary-wing formations.
Significance. If the recasting and SDP-based synthesis hold with the claimed guarantees, the work would offer a notable advance in combining output regulation, data-driven control, and game-theoretic NE seeking under partial information and disturbances, enabling robust decentralized protocols for applications like UAV formations without requiring full model knowledge.
major comments (2)
- [Main body (reformulation and SDP synthesis sections)] No section supplies an explicit state-space embedding that simultaneously encodes the NE variational inequality, equality constraints, and partial-information graph while preserving the distributed information structure. This embedding is required for the reformulation to cooperative output regulation and for the subsequent noisy-data SDP to certify both internal stability and regulation to the NE; without it the central claim cannot be verified.
- [Abstract and § on data-driven synthesis] The abstract asserts formal guarantees for stability and asymptotic convergence via SDPs but provides no derivation steps, error bounds on the data, or conditions under which the noisy input-state pairs yield a valid controller. These details are load-bearing for the data-driven claim and must be supplied with explicit assumptions on the data set.
Simulated Author's Rebuttal
We thank the referee for the careful reading and constructive feedback. We address each major comment below, indicating where revisions will be made to strengthen the presentation of the reformulation and data-driven guarantees.
read point-by-point responses
-
Referee: [Main body (reformulation and SDP synthesis sections)] No section supplies an explicit state-space embedding that simultaneously encodes the NE variational inequality, equality constraints, and partial-information graph while preserving the distributed information structure. This embedding is required for the reformulation to cooperative output regulation and for the subsequent noisy-data SDP to certify both internal stability and regulation to the NE; without it the central claim cannot be verified.
Authors: We agree that a single consolidated state-space embedding would improve clarity. The current manuscript encodes the variational inequality via the pseudo-gradient and the equality constraints via an auxiliary variable in the internal model, while the partial-information graph appears through the Laplacian in the distributed protocol. However, these elements are presented piecewise. In the revision we will insert an explicit augmented state vector x_aug = [x; λ; e] (where λ are the multipliers for the constraints and e the regulation errors) together with the block-structured system matrix that preserves the block-diagonal structure required by the distributed protocol. This will be placed in a new subsection of the reformulation section and will be used to state the cooperative output-regulation problem before the SDP synthesis. revision: yes
-
Referee: [Abstract and § on data-driven synthesis] The abstract asserts formal guarantees for stability and asymptotic convergence via SDPs but provides no derivation steps, error bounds on the data, or conditions under which the noisy input-state pairs yield a valid controller. These details are load-bearing for the data-driven claim and must be supplied with explicit assumptions on the data set.
Authors: The derivation of the SDP (based on the data-driven matrix inequality obtained via the matrix S-lemma applied to the noise bound ||Δ|| ≤ ε) is contained in the data-driven synthesis section, together with the persistence-of-excitation assumption on the collected trajectories. The abstract, however, is too terse. We will revise the abstract to include the sentence “under the assumption of bounded measurement noise and sufficiently rich data satisfying a persistence-of-excitation condition.” In the main text we will add an explicit theorem stating the LMI feasibility condition, the resulting closed-loop stability margin, and the bound on the residual regulation error as a function of the noise level ε. A short remark will also list the precise data-set assumptions required for the SDP to certify internal stability and asymptotic NE convergence. revision: partial
Circularity Check
No significant circularity; derivation relies on external reformulation and data
full rationale
The provided abstract and description contain no quoted equations or steps that reduce by construction to fitted inputs, self-definitions, or self-citation chains. The central move (reformulating NE seeking under partial information and constraints as cooperative output regulation, then applying data-driven SDP synthesis) is presented as a modeling choice drawing on noisy input-state data rather than a tautological renaming or parameter fit. No load-bearing uniqueness theorem or ansatz is shown to originate solely from the authors' prior work within the given text. This is the expected honest non-finding for a paper whose core synthesis step uses external measurements.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption The multi-agent dynamics admit a reformulation as a cooperative output regulation problem under partial-decision information and equality constraints.
- domain assumption Noisy input-state data collected from the unknown linear system are sufficient for SDP-based data-driven stabilization with formal closed-loop guarantees.
Reference graph
Works this paper leans on
-
[1]
Data-driven control via
Bisoffi, Andrea and De Persis, Claudio and Tesi, Pietro , journal=. Data-driven control via. 2022 , publisher=
2022
-
[2]
Ba. Dynamic. 1998 , publisher=
1998
-
[3]
Linear quadratic network games with dynamic players: Stabilization and output convergence to
Guo, Meichen and De Persis, Claudio , journal=. Linear quadratic network games with dynamic players: Stabilization and output convergence to. 2021 , publisher=
2021
-
[4]
IEEE Transactions on Automatic Control , volume=
Learning controllers from data via approximate nonlinearity cancellation , author=. IEEE Transactions on Automatic Control , volume=. 2023 , publisher=
2023
-
[5]
Data-driven harmonic output regulation of a class of nonlinear systems , author=. Systems. 2025 , publisher=
2025
-
[6]
Distributed seeking of
Stankovic, Milo. Distributed seeking of. IEEE Transactions on Automatic Control , volume=. 2011 , publisher=
2011
-
[7]
Nonlinear
Alberto Isidori , year=. Nonlinear
-
[8]
Distributed averaging integral
De Persis, Claudio and Grammatico, Sergio , journal=. Distributed averaging integral. 2019 , publisher=
2019
-
[9]
IEEE Trans
Real and complex monotone communication games , author=. IEEE Trans. Inf. Theory , volume=. 2014 , publisher=
2014
-
[10]
A passivity approach to game-theoretic
Fan, Xingzhe and Alpcan, Tansu and Arcak, Murat and Wen, TJ and Ba. A passivity approach to game-theoretic. Automatica , volume=. 2006 , publisher=
2006
-
[11]
IEEE Access , volume=
Application of game theory in integrated energy system systems: A review , author=. IEEE Access , volume=. May 2020 , publisher=
2020
-
[12]
IEEE Signal Process
Game-theoretic methods for the smart grid: An overview of microgrid systems, demand-side management, and smart grid communications , author=. IEEE Signal Process. Mag. , volume=. 2012 , publisher=
2012
-
[13]
Automatica , volume=
A differential game approach to intrinsic formation control , author=. Automatica , volume=. 2022 , publisher=
2022
-
[14]
IEEE Trans
Game-based formation control of high-order multi-agent systems , author=. IEEE Trans. Netw. Sci. Eng. , volume=. 2022 , publisher=
2022
-
[15]
Distributed algorithms for aggregative games on graphs , author=. Oper. Res. , volume=. May 2016 , publisher=
2016
-
[16]
and Pavel, Lacra , journal=
Romano, Andrew R. and Pavel, Lacra , journal=. Dynamic. 2019 , publisher=
2019
-
[17]
Distributed
Salehisadaghiani, Farzad and Pavel, Lacra , journal=. Distributed. 2016 , publisher=
2016
-
[18]
Distributed
Salehisadaghiani, Farzad and Pavel, Lacra , journal=. Distributed. 2018 , publisher=
2018
-
[19]
IEEE Transactions on Automatic Control , volume=
Leader--follower network aggregative game with stochastic agents’ communication and activeness , author=. IEEE Transactions on Automatic Control , volume=. 2020 , publisher=
2020
-
[20]
IEEE Transactions on Automatic Control , volume=
Asynchronous and time-varying proximal type dynamics in multiagent network games , author=. IEEE Transactions on Automatic Control , volume=. 2020 , publisher=
2020
-
[21]
IEEE Trans
Autonomous demand-side management based on game-theoretic energy consumption scheduling for the future smart grid , author=. IEEE Trans. Smart Grid , volume=. 2010 , publisher=
2010
-
[22]
IEEE Trans
Distributed game strategy for formation flying of multiple spacecraft with disturbance rejection , author=. IEEE Trans. Aerospace Electron. Syst. , volume=. 2020 , publisher=
2020
-
[23]
IEEE Transactions on Cybernetics , volume=
Distributed optimization design of continuous-time multiagent systems with unknown-frequency disturbances , author=. IEEE Transactions on Cybernetics , volume=. 2017 , publisher=
2017
-
[24]
IEEE Transactions on Cybernetics , volume=
Distributed optimization for a class of nonlinear multiagent systems with disturbance rejection , author=. IEEE Transactions on Cybernetics , volume=. 2015 , publisher=
2015
-
[25]
IEEE Trans
Data-driven inverse reinforcement learning control for linear multiplayer games , author=. IEEE Trans. Neural Netw. Learn. Syst. , volume=. 2022 , publisher=
2022
-
[26]
IEEE Access , volume=
Data-driven nonzero-sum game for discrete-time systems using off-policy reinforcement learning , author=. IEEE Access , volume=. 2019 , publisher=
2019
-
[27]
IEEE Trans
Off-policy integral reinforcement learning method to solve nonlinear continuous-time multiplayer nonzero-sum games , author=. IEEE Trans. Neural Netw. Learn. Syst. , volume=. 2016 , publisher=
2016
-
[28]
Automatica , volume=
Reinforcement learning and non-zero-sum game output regulation for multi-player linear uncertain systems , author=. Automatica , volume=. 2020 , publisher=
2020
-
[29]
IEEE Transactions on Automatic Control , volume=
Nash equilibria for linear quadratic discrete-time dynamic games via iterative and data-driven algorithms , author=. IEEE Transactions on Automatic Control , volume=. 2024 , publisher=
2024
-
[30]
2023 , publisher=
Giaccagli, Mattia and Andrieu, Vincent and Tarbouriech, Sophie and Astolfi, Daniele , journal=. 2023 , publisher=
2023
-
[31]
Han, Zhu and Niyato, Dusit and Saad, Walid and Ba. Game. 2011 , publisher=
2011
-
[32]
IEEE Trans
Nash equilibrium seeking for high-order multiagent systems with unknown dynamics , author=. IEEE Trans. Control Netw. Syst. , volume=. 2022 , publisher=
2022
-
[33]
Proceedings of the IEEE Conference on Decision and Control , pages=
Game-theoretic steady-state control , author=. Proceedings of the IEEE Conference on Decision and Control , pages=
-
[34]
Proceedings of the IEEE , volume=
Consensus and cooperation in networked multi-agent systems , author=. Proceedings of the IEEE , volume=. 2007 , publisher=
2007
-
[35]
IEEE Transactions on Automatic Control , volume=
Consensus seeking in multiagent systems under dynamically changing interaction topologies , author=. IEEE Transactions on Automatic Control , volume=. 2005 , publisher=
2005
-
[36]
Output Consensus of Heterogeneous Uncertain Linear Multi-Agent Systems , year=
Kim, Hongkeun and Shim, Hyungbo and Seo, Jin Heon , journal=. Output Consensus of Heterogeneous Uncertain Linear Multi-Agent Systems , year=
-
[37]
IEEE Transactions on Automatic Control , volume=
Linear-convex optimal steady-state control , author=. IEEE Transactions on Automatic Control , volume=. 2020 , publisher=
2020
-
[38]
Finite-dimensional
Facchinei, Francisco and Pang, Jong-Shi , year=. Finite-dimensional
-
[39]
, volume=
Godsil, Chris and Royle, Gordon F. , volume=. Algebraic. 2013 , publisher=
2013
-
[40]
and Grizzle, Jessy W
Khalil, Hassan K. and Grizzle, Jessy W. , publisher=. Nonlinear
-
[41]
IET Control Theory Appl
Fault-tolerant output synchronisation control of multi-vehicle systems , author=. IET Control Theory Appl. , volume=. May 2014 , publisher=
2014
-
[42]
IFAC-PapersOnLine , volume=
Controller Design for Game Theoretic Steady-State Control: An LMI Approach , author=. IFAC-PapersOnLine , volume=. 2023 , publisher=
2023
-
[43]
IEEE Transactions on Automatic Control , volume=
Nash equilibrium seeking in noncooperative games , author=. IEEE Transactions on Automatic Control , volume=. 2011 , publisher=
2011
-
[44]
Distributed
He, Xiongnan and Huang, Jie , journal=. Distributed. 2023 , publisher=
2023
-
[45]
Energy , volume=
Nash equilibria in electricity pool markets with large-scale wind power integration , author=. Energy , volume=. 2021 , publisher=
2021
-
[46]
IEEE Transactions on Automatic Control , volume=
Optimal strategies for pursuit-evasion differential games of players with damped double integrator dynamics , author=. IEEE Transactions on Automatic Control , volume=. 2023 , publisher=
2023
-
[47]
and Koru, Ahmet Taha and Kartal, Yusuf and Lopez, Victor G
Naleini, Maryam N. and Koru, Ahmet Taha and Kartal, Yusuf and Lopez, Victor G. and Lewis, Frank L. , journal=. Leader-following cluster consensus as a graphical differential game with a. 2022 , publisher=
2022
-
[48]
, journal=
Nourian, Mojtaba and Caines, Peter E. , journal=. -. 2013 , publisher=
2013
-
[49]
and Pavel, Lacra , journal=
Romano, Andrew R. and Pavel, Lacra , journal=. Game-Theoretic Steady-State Control: A General Framework for. 2025 , volume=
2025
-
[50]
A note on persistency of excitation , author=. Systems. 2005 , publisher=
2005
-
[51]
and Varga, Richard S
Feingold, David G. and Varga, Richard S. , journal=. Block diagonally dominant matrices and generalizations of the
-
[52]
IEEE Transactions on Automatic Control , volume=
Data-driven resilient predictive control under denial-of-service , author=. IEEE Transactions on Automatic Control , volume=. 2022 , publisher=
2022
-
[53]
arXiv preprint arXiv:2505.09255 , year=
Data-driven Internal Model Control for Output Regulation , author=. arXiv preprint arXiv:2505.09255 , year=
-
[54]
A priori data-driven robustness guarantees on strategic deviations from generalised
Pantazis, Georgios and Fele, Filiberto and Margellos, Kostas , journal=. A priori data-driven robustness guarantees on strategic deviations from generalised. 2024 , publisher=
2024
-
[55]
Prescribed-time fully distributed
Xu, Bo and Li, Yuan-Xin , journal=. Prescribed-time fully distributed. 2024 , publisher=
2024
-
[56]
Data-Driven Internal Model Control for Output Regulation , year=
Liu, Wenjie and Li, Yifei and Sun, Jian and Wang, Gang and You, Keyou and Xie, Lihua and Chen, Jie , journal=. Data-Driven Internal Model Control for Output Regulation , year=
-
[57]
Distributed
Deng, Zhenhua and Chen, Tao , journal=. Distributed. 2024 , volume=
2024
-
[58]
IEEE Transactions on Automatic Control , volume=
Data-driven self-triggered control via trajectory prediction , author=. IEEE Transactions on Automatic Control , volume=. 2023 , publisher=
2023
-
[59]
Distributed
Zhu, Yanan and Yu, Wenwu and Wen, Guanghui and Chen, Guanrong , journal=. Distributed. 2020 , publisher=
2020
-
[60]
Appointed-Time and Attack-Free Bipartite Synchronization of Generic Linear Multiagent Systems Over Directed Switching Networks , year=
Zhao, Yu and Zhou, Yuan and Huang, Panfeng and Chen, Guanrong , journal=. Appointed-Time and Attack-Free Bipartite Synchronization of Generic Linear Multiagent Systems Over Directed Switching Networks , year=
-
[61]
Local Generalized
Scarabaggio, Paolo and Carli, Raffaele and Grammatico, Sergio and Dotoli, Mariagrazia , journal=. Local Generalized. 2025 , volume=
2025
-
[62]
Distributed
He, Xiongnan and Huang, Jie , journal=. Distributed. 2024 , volume=
2024
-
[63]
Model-Driven and Data-Driven Reachable Set Estimation for Multirate Sampled-Data Truck-Trailer System , year=
Yang, Te and Bu, Keqing and Chen, Guoliang and Xie, Xiang-Peng and Xia, Jianwei , journal=. Model-Driven and Data-Driven Reachable Set Estimation for Multirate Sampled-Data Truck-Trailer System , year=
-
[64]
On the Equivalence of Model-Based and Data-Driven Approaches to the Design of Unknown-Input Observers , year=
Disarò, Giorgia and Valcher, Maria Elena , journal=. On the Equivalence of Model-Based and Data-Driven Approaches to the Design of Unknown-Input Observers , year=
-
[65]
IEEE Transactions on Automatic Control , volume=
Formulas for data-driven control: Stabilization, optimality, and robustness , author=. IEEE Transactions on Automatic Control , volume=. 2019 , publisher=
2019
-
[66]
Distributed Resource Allocation Over Multiple Interacting Coalitions: A Game-Theoretic Approach , year=
Zhou, Jialing and Wen, Guanghui and Lv, Yuezu and Yang, Tao and Chen, Guanrong , journal=. Distributed Resource Allocation Over Multiple Interacting Coalitions: A Game-Theoretic Approach , year=
-
[67]
Distributed Minmax Strategy for Consensus Tracking in Differential Graphical Games: A Model-Free Approach , year=
Zhou, Yan and Zhou, Jialing and Wen, Guanghui and Gan, Minggang and Yang, Tao , journal=. Distributed Minmax Strategy for Consensus Tracking in Differential Graphical Games: A Model-Free Approach , year=
-
[68]
Data-driven consensus control of fully distributed event-triggered multi-agent systems , author=. Sci. China Inf. Sci. , volume=. 2023 , publisher=
2023
-
[69]
IEEE Trans
Controller synthesis of aperiodic sampled-data networked control system with application to interleaved flyback module integrated converter , author=. IEEE Trans. Circuits Syst. I, Reg. Papers , volume=. 2023 , publisher=
2023
-
[70]
On the exact convergence to
Gadjov, Dian and Pavel, Lacra , journal=. On the exact convergence to. 2022 , publisher=
2022
-
[71]
and Davoudi, Ali , journal=
Qian, Yang-Yang and Liu, Mushuang and Wan, Yan and Lewis, Frank L. and Davoudi, Ali , journal=. Distributed adaptive. 2021 , publisher=
2021
-
[72]
Online Interior-Point Methods for Time-Varying Equality-Constrained Optimization , year=
Lupien, Jean-Luc and Shames, Iman and Lesage-Landry, Antoine , journal=. Online Interior-Point Methods for Time-Varying Equality-Constrained Optimization , year=
-
[73]
Automatica , volume=
Sign projected gradient flow: A continuous-time approach to convex optimization with linear equality constraints , author=. Automatica , volume=. 2020 , publisher=
2020
-
[74]
On data-driven stabilization of systems with nonlinearities satisfying quadratic constraints , author=. Systems. 2022 , publisher=
2022
-
[75]
A feedback control algorithm to steer networks to a
De Persis, Claudio and Monshizadeh, Nima , journal=. A feedback control algorithm to steer networks to a. 2019 , publisher=
2019
-
[76]
Distributed
Zhang, Yawei and Liang, Shu and Wang, Xinghu and Ji, Haibo , journal=. Distributed. 2019 , publisher=
2019
-
[77]
Distributed
Huang, Jie , journal=. Distributed. 2024 , publisher=
2024
-
[78]
and Vandenberghe, Lieven , year=
Boyd, Stephen P. and Vandenberghe, Lieven , year=. Convex
-
[79]
Robust distributed
Wang, Linqi and Liu, Wenjie and Li, Yifei and Xia, Yinqiu and Wang, Gang and Xie, Lihua , journal=. Robust distributed. 2026 , publisher=
2026
-
[80]
Robust Distributed
Wang, Xue-Fang and Sun, Xi-Ming and Ye, Maojiao and Liu, Kun-Zhi , journal=. Robust Distributed. 2022 , volume=
2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.