Counting Trees from Satellite Imagery with Noisy Supervision
Pith reviewed 2026-06-26 05:33 UTC · model grok-4.3
The pith
Unbalanced optimal transport with residual-based self-correction enables tree counting from satellite imagery despite noisy LiDAR labels.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
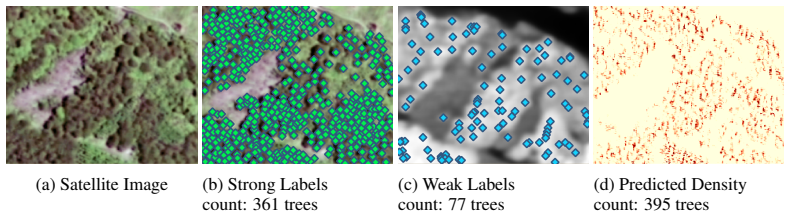
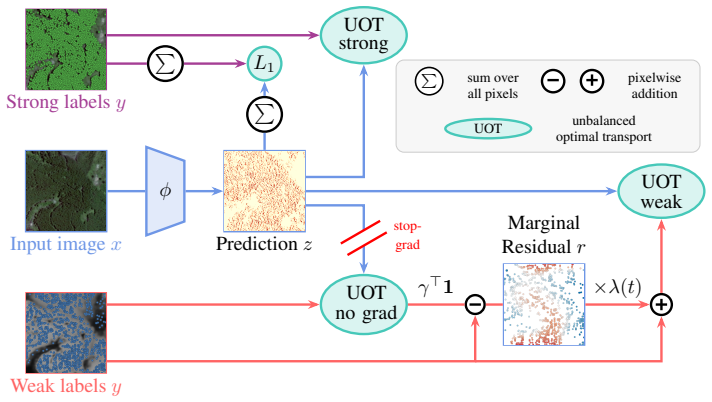
The authors claim that formulating tree counting as a spatial density matching problem supervised through Unbalanced Optimal Transport, together with a self-correction mechanism that leverages transport residuals to progressively refine noisy supervision, produces accurate counts from satellite imagery even when individual tree definitions are ill-posed and labels come from imperfect LiDAR sources.
What carries the argument
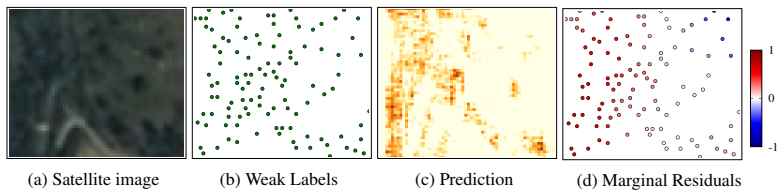
Unbalanced Optimal Transport formulation for spatial density matching, with transport residuals supplying reliability-aware signals to refine noisy labels during training.
If this is right
- Large-scale tree counts become feasible over 25,890 square kilometers spanning multiple continents and satellite sensors without requiring fully verified labels.
- One framework simultaneously supports precise localization of isolated trees and robust density estimation inside dense forests.
- The cost of manual annotation drops because noisy but scalable LiDAR-derived labels can be used directly.
- Environmental monitoring gains a practical route to repeated, wide-area inventories of tree populations.
Where Pith is reading between the lines
- The same residual-driven correction might extend to counting other objects whose instances blur together at the imaging scale.
- Testing the approach on labels from even cheaper or lower-quality sources would reveal how far the self-correction can compensate.
- Integration with temporal sequences of satellite images could turn the density estimates into change detection for forest loss or growth.
Load-bearing premise
The self-correction mechanism can progressively refine noisy supervision during training without introducing new errors or biases.
What would settle it
On the TinyTrees benchmark the method fails to outperform detection-based, regression-based, and transport-based baselines in counting accuracy across the tested regions and sensors.
Figures
read the original abstract
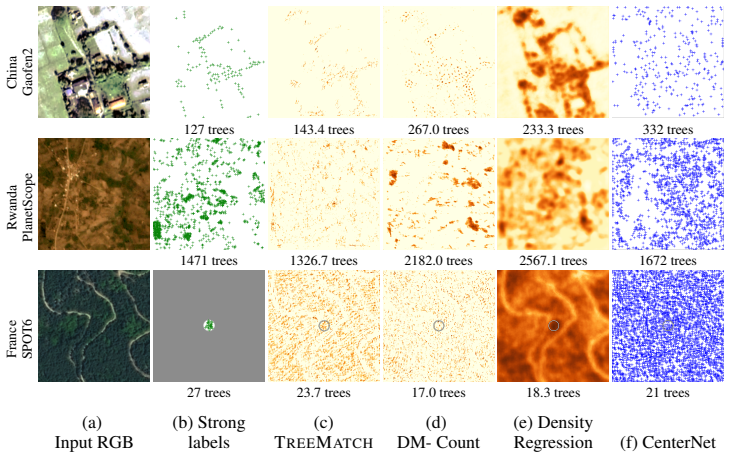
Counting individual trees is a fundamental task for environmental monitoring, yet remains largely unexplored with satellite imagery. At these resolutions, isolated trees may still be identifiable, but crown boundaries become ambiguous in dense forests, making the notion of an individual tree inherently ill-defined. Moreover, large-scale manual annotations of individual trees are prohibitively expensive. While scalable supervision can be derived from airborne LiDAR, the resulting annotations are noisy and difficult to exploit effectively. We address these challenges by formulating tree counting as a spatial density matching problem supervised through Unbalanced Optimal Transport. This formulation naturally accommodates both precise localization of isolate trees and robust density estimation in dense forests. We further introduce a self-correction mechanism that leverages transport residuals to progressively refine noisy supervision during training. We evaluate our approach on TinyTrees, a new benchmark spanning three continents and three satellite sensors, comprising over 216 million tree annotations (including 639k manually verified instances) across $25\,890$ km$^2$. Our method consistently outperforms detection-based, regression-based, and transport-based distribution-matching baselines, demonstrating the effectiveness of unbalanced transport and reliability-aware supervision for large-scale tree counting from satellite imagery. Code, data and models are available at https://github.com/dgominski/treematch.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper formulates tree counting from satellite imagery as a spatial density matching problem solved via unbalanced optimal transport, introduces a self-correction step that iteratively refines noisy LiDAR-derived density maps using transport residuals, and reports consistent outperformance over detection-based, regression-based, and transport-based baselines on the new TinyTrees benchmark (216M annotations, 639k manually verified, 25,890 km² across three continents and sensors).
Significance. If the central claims hold, the work would enable scalable tree counting at continental scales by exploiting noisy but cheap LiDAR supervision where manual annotation is infeasible; the public release of code, data, and models is a clear strength that supports reproducibility and follow-on research.
major comments (2)
- [self-correction mechanism] The headline outperformance claim rests on the self-correction mechanism (described after the unbalanced OT formulation). No quantitative validation is supplied that transport residuals predominantly capture annotation noise rather than model underfitting in dense canopies or sensor-specific artifacts; a direct comparison of residual magnitude against the 639k verified manual counts would be required to substantiate that the loop improves rather than entrenches supervision errors.
- [evaluation on TinyTrees] The abstract states that the method 'consistently outperforms' the three classes of baselines, yet the provided experimental summary contains no error analysis, ablation of the reliability-aware weighting, or per-sensor/per-density breakdown that would confirm the gains are attributable to unbalanced transport plus self-correction rather than implementation details of the baselines.
minor comments (1)
- [method] Notation for the unbalanced transport cost and the residual update rule should be introduced with explicit equations rather than prose descriptions to aid reproducibility.
Simulated Author's Rebuttal
We thank the referee for their thoughtful comments and the opportunity to clarify and strengthen our manuscript. We address each major comment below and outline the revisions we will make.
read point-by-point responses
-
Referee: [self-correction mechanism] The headline outperformance claim rests on the self-correction mechanism (described after the unbalanced OT formulation). No quantitative validation is supplied that transport residuals predominantly capture annotation noise rather than model underfitting in dense canopies or sensor-specific artifacts; a direct comparison of residual magnitude against the 639k verified manual counts would be required to substantiate that the loop improves rather than entrenches supervision errors.
Authors: We agree that additional validation would strengthen the presentation of the self-correction mechanism. In the revised manuscript, we will provide a quantitative analysis comparing the magnitude of transport residuals on the 639k manually verified annotations versus the noisy LiDAR-derived ones. This will demonstrate that residuals are larger in regions with known annotation discrepancies, supporting that they capture noise rather than systematic underfitting. We will also include breakdowns by canopy density and sensor to address potential artifacts. revision: yes
-
Referee: [evaluation on TinyTrees] The abstract states that the method 'consistently outperforms' the three classes of baselines, yet the provided experimental summary contains no error analysis, ablation of the reliability-aware weighting, or per-sensor/per-density breakdown that would confirm the gains are attributable to unbalanced transport plus self-correction rather than implementation details of the baselines.
Authors: We acknowledge the need for more detailed evaluation to attribute the gains specifically to our contributions. The full manuscript includes some ablations, but we will expand the experimental section with error bars, an ablation study isolating the reliability-aware weighting, and per-sensor and per-density performance breakdowns. These additions will confirm the improvements stem from the unbalanced OT and self-correction components. revision: yes
Circularity Check
No significant circularity detected
full rationale
The paper formulates tree counting as a spatial density matching problem using unbalanced optimal transport, with an iterative self-correction step that refines noisy LiDAR-derived labels via transport residuals. This derivation follows standard OT principles applied to the given supervision and is evaluated on an external benchmark (TinyTrees) containing independent manual verifications across continents and sensors. No equations reduce the output to the input by construction, no fitted parameters are renamed as predictions, and no load-bearing self-citations or uniqueness theorems from the authors are invoked. The central claims rest on empirical outperformance against baselines rather than tautological redefinitions.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Unbalanced optimal transport is suitable for matching densities with noisy supervision in this domain
Reference graph
Works this paper leans on
-
[1]
High-resolution global maps of 21st-century forest cover change.Science, 2013
Matthew C Hansen, Peter V Potapov, Rebecca Moore, Matt Hancher, Svetlana A Turubanova, Alexandra Tyukavina, David Thau, Stephen V Stehman, Scott J Goetz, Thomas R Loveland, et al. High-resolution global maps of 21st-century forest cover change.Science, 2013. 1
2013
-
[2]
The global forest above-ground biomass pool for 2010 estimated from high-resolution satellite ob- servations.Earth System Science Data, 2021
Maurizio Santoro, Oliver Cartus, Nuno Carvalhais, Dana ¨e Rozendaal, Valerio Avitabile, Ar- nan Araza, Sytze De Bruin, Martin Herold, Shaun Quegan, Pedro Rodr´ıguez-Veiga, et al. The global forest above-ground biomass pool for 2010 estimated from high-resolution satellite ob- servations.Earth System Science Data, 2021. 1 11
2010
-
[3]
Jamie Tolan, Hung-I Yang, Benjamin Nosarzewski, Guillaume Couairon, Huy V V o, John Brandt, Justine Spore, Sayantan Majumdar, Daniel Haziza, Janaki Vamaraju, et al. Very high resolution canopy height maps from RGB imagery using self-supervised vision transformer and convolutional decoder trained on aerial LiDAR.Remote Sensing of Environment, 2024. 1, 2
2024
-
[4]
Open-Canopy: Towards Very High Resolution Forest Monitoring
Fajwel Fogel, Yohann Perron, Nikola Besic, Laurent Saint-Andr ´e, Agn `es Pellissier-Tanon, Martin Schwartz, Thomas Boudras, Ibrahim Fayad, Alexandre d’Aspremont, Loic Landrieu, and Philippe Ciais. Open-Canopy: Towards Very High Resolution Forest Monitoring. In CVPR, 2025. 1, 3, 10, 11, 19
2025
-
[5]
Kelly, Martin Schwartz, Sassan Saatchi, Philippe Ciais, Se- bastian Pokutta, Martin Brandt, and Fabian Gieseke
Jan Pauls, Max Zimmer, Una M. Kelly, Martin Schwartz, Sassan Saatchi, Philippe Ciais, Se- bastian Pokutta, Martin Brandt, and Fabian Gieseke. Estimating Canopy Height at Scale. In ICML, 2024. 1, 11
2024
-
[6]
Greening china naturally.Ambio, 2011
Shixiong Cao, Ge Sun, Zhiqiang Zhang, Liding Chen, Qi Feng, Bojie Fu, Steve McNulty, David Shankman, Jianwu Tang, Yanhui Wang, et al. Greening china naturally.Ambio, 2011. 1
2011
-
[7]
Individual tree biomass estimation using terrestrial laser scanning.ISPRS Journal of Photogrammetry and Remote Sensing, 2013
Ville Kankare, Markus Holopainen, Mikko Vastaranta, Eetu Puttonen, Xiaowei Yu, Juha Hyypp¨a, Matti Vaaja, Hannu Hyypp ¨a, and Petteri Alho. Individual tree biomass estimation using terrestrial laser scanning.ISPRS Journal of Photogrammetry and Remote Sensing, 2013. 1
2013
-
[8]
Mirela Beloiu, Lucca Heinzmann, Nataliia Rehush, Arthur Gessler, and Verena C. Griess. Individual Tree-Crown Detection and Species Identification in Heterogeneous Forests Using Aerial RGB Imagery and Deep Learning.Remote Sensing, 2023. 1
2023
-
[9]
Hedgerow mapping with high resolution satellite imagery to support policy initiatives at national level.Remote Sensing of Environment, 2025
Javier Muro, Lukas Blickensd ¨orfer, Axel Don, Anna K ¨ober, Sarah Asam, Marcel Schwieder, and Stefan Erasmi. Hedgerow mapping with high resolution satellite imagery to support policy initiatives at national level.Remote Sensing of Environment, 2025. 1
2025
-
[10]
Jonathan Ventura, Camille Pawlak, Milo Honsberger, Cameron Gonsalves, Julian Rice, Na- talie L. R. Love, Skyler Han, Viet Nguyen, Keilana Sugano, Jacqueline Doremus, G. Andrew Fricker, Jenn Yost, and Matt Ritter. Individual tree detection in large-scale urban environments using high-resolution multispectral imagery.International Journal of Applied Earth O...
2024
-
[11]
The Auto Arborist Dataset: A Large-Scale Benchmark for Multiview Urban Forest Monitoring Under Domain Shift
Sara Beery, Guanhang Wu, Trevor Edwards, Filip Pavetic, Bo Majewski, Shreyasee Mukher- jee, Stanley Chan, John Morgan, Vivek Rathod, and Jonathan Huang. The Auto Arborist Dataset: A Large-Scale Benchmark for Multiview Urban Forest Monitoring Under Domain Shift. InCVPR, 2022. 1
2022
-
[12]
Transformer for Tree Counting in Aerial Images.Remote Sensing,
Guang Chen and Yi Shang. Transformer for Tree Counting in Aerial Images.Remote Sensing,
-
[13]
Tree counting with high spatial- resolution satellite imagery based on deep neural networks.Ecological Indicators, 2021
Ling Yao, Tang Liu, Jun Qin, Ning Lu, and Chenghu Zhou. Tree counting with high spatial- resolution satellite imagery based on deep neural networks.Ecological Indicators, 2021. 1, 3
2021
-
[14]
VHRTrees: A new benchmark dataset for tree detection in satellite imagery and performance evaluation with YOLO-based models.Frontiers in Forests and Global Change, 2025
S ¸ule Nur Topg¨ul, Elif Sertel, Samet Aksoy, Cem ¨Unsalan, and Johan ES Fransson. VHRTrees: A new benchmark dataset for tree detection in satellite imagery and performance evaluation with YOLO-based models.Frontiers in Forests and Global Change, 2025. 3
2025
-
[15]
Get Your Embedding Space in Order: Domain-Adaptive Regression for Forest Monitoring
Sizhuo Li, Dimitri Gominski, Martin Brandt, Xiaoye Tong, and Philippe Ciais. Get Your Embedding Space in Order: Domain-Adaptive Regression for Forest Monitoring. InECCV,
-
[16]
Weinstein, Sarah J
Ben G. Weinstein, Sarah J. Graves, Sergio Marconi, Aditya Singh, Alina Zare, Dylan Stewart, Stephanie A. Bohlman, and Ethan P. White. A benchmark dataset for canopy crown detection and delineation in co-registered airborne RGB, LiDAR and hyperspectral imagery from the National Ecological Observation Network.PLOS Computational Biology, 2021. 3
2021
-
[17]
Density Map Regression Guided Detection Network for RGB-D Crowd Counting and Localization
Dongze Lian, Jing Li, Jia Zheng, Weixin Luo, and Shenghua Gao. Density Map Regression Guided Detection Network for RGB-D Crowd Counting and Localization. InCVPR, 2019. 2
2019
-
[18]
L´opez-Sastre
Daniel O ˜noro-Rubio and Roberto J. L´opez-Sastre. Towards Perspective-Free Object Counting with Deep Learning. InECCV, 2016. 2
2016
-
[19]
Adaptive Density Map Generation for Crowd Counting
Jia Wan and Antoni Chan. Adaptive Density Map Generation for Crowd Counting. InICCV,
-
[20]
Point in, Box Out: Beyond Count- ing Persons in Crowds
Yuting Liu, Miaojing Shi, Qijun Zhao, and Xiaofang Wang. Point in, Box Out: Beyond Count- ing Persons in Crowds. InCVPR, 2019. 2
2019
-
[21]
Rethinking Counting and Localization in Crowds: A Purely Point-Based Framework
Qingyu Song, Changan Wang, Zhengkai Jiang, Yabiao Wang, Ying Tai, Chengjie Wang, Jilin Li, Feiyue Huang, and Yang Wu. Rethinking Counting and Localization in Crowds: A Purely Point-Based Framework. InICCV, 2021. 2, 8, 9
2021
-
[22]
Sub-continental-scale carbon stocks of individual trees in African drylands.Nature, 2023
Compton Tucker, Martin Brandt, Pierre Hiernaux, Ankit Kariryaa, Kjeld Rasmussen, Jen- nifer Small, Christian Igel, Florian Reiner, Katherine Melocik, Jesse Meyer, Scott Sinno, Eric Romero, Erin Glennie, Yasmin Fitts, August Morin, Jorge Pinzon, Devin McClain, Paul Morin, Claire Porter, Shane Loeffler, Laurent Kergoat, Bil-Assanou Issoufou, Patrice Savadog...
2023
-
[23]
A high-resolution canopy height model of the Earth.Nature Ecology & Evolution, 2023
Nico Lang, Walter Jetz, Konrad Schindler, and Jan Dirk Wegner. A high-resolution canopy height model of the Earth.Nature Ecology & Evolution, 2023. 2, 8
2023
-
[24]
National-scale tree species mapping with deep learning reveals forest management insights in Germany.International Journal of Applied Earth Observation and Geoinformation, 2025
Yang Mu, Jianhua Guo, Muhammad Shahzad, and Xiao Xiang Zhu. National-scale tree species mapping with deep learning reveals forest management insights in Germany.International Journal of Applied Earth Observation and Geoinformation, 2025. 2
2025
-
[25]
OAM-TCD: A globally diverse dataset of high-resolution tree cover maps
Joshua Veitch-Michaelis, Andrew Cottam, Daniella Schweizer, Eben Broadbent, David Dao, Ce Zhang, Angelica Almeyda Zambrano, and Simeon Max. OAM-TCD: A globally diverse dataset of high-resolution tree cover maps. InNeurIPS Datasets and Benchmarks Track, 2024. 2
2024
-
[26]
LIDAR HD
IGN. LIDAR HD. URLhttps://geoservices.ign.fr/lidarhd. 3, 7
-
[27]
Charles Gaydon and Floryne Roche. PureForest: A Large-Scale Aerial Lidar and Aerial Imagery Dataset for Tree Species Classification in Monospecific Forests. arxiv.org/abs/2404.12064, 2024. 3
arXiv 2024
-
[28]
Ahlswede, C
S. Ahlswede, C. Schulz, C. Gava, P. Helber, B. Bischke, M. F¨orster, F. Arias, J. Hees, B. Demir, and B. Kleinschmit. TreeSatAI Benchmark Archive: A multi-sensor, multi-label dataset for tree species classification in remote sensing.Earth System Science Data, 2023. 3
2023
-
[29]
Martin Brandt, Compton J. Tucker, Ankit Kariryaa, Kjeld Rasmussen, Christin Abel, Jennifer Small, Jerome Chave, Laura Vang Rasmussen, Pierre Hiernaux, Abdoul Aziz Diouf, Laurent Kergoat, Ole Mertz, Christian Igel, Fabian Gieseke, Johannes Sch¨oning, Sizhuo Li, Katherine Melocik, Jesse Meyer, Scott Sinno, Eric Romero, Erin Glennie, Amandine Montagu, Morgan...
2020
-
[30]
Bridging Classical and Modern Computer Vision: PerceptiveNet for Tree Crown Semantic Segmentation
Georgios V oulgaris. Bridging Classical and Modern Computer Vision: PerceptiveNet for Tree Crown Semantic Segmentation. InCVPR Workshops, 2025. 3
2025
-
[31]
Seg- mentAnyTree: A sensor and platform agnostic deep learning model for tree segmentation using laser scanning data.Remote Sensing of Environment, 2024
Maciej Wielgosz, Stefano Puliti, Binbin Xiang, Konrad Schindler, and Rasmus Astrup. Seg- mentAnyTree: A sensor and platform agnostic deep learning model for tree segmentation using laser scanning data.Remote Sensing of Environment, 2024. 3
2024
-
[32]
Yeh, Bedrich Benes, and Daniel Aliaga
Adnan Firoze, Cameron Wingren, Raymond A. Yeh, Bedrich Benes, and Daniel Aliaga. Tree Instance Segmentation With Temporal Contour Graph. InCVPR, 2023. 3
2023
-
[33]
Trees as Gaussians: Large-Scale Individual Tree Mapping.Journal of Remote Sensing, 2026
Dimitri Gominski, Martin Brandt, Xiaoye Tong, Siyu Liu, Maurice Mugabowindekwe, Sizhuo Li, Florian Reiner, Andrew Davies, and Rasmus Fensholt. Trees as Gaussians: Large-Scale Individual Tree Mapping.Journal of Remote Sensing, 2026. 3, 7
2026
-
[34]
Bayesian Loss for Crowd Count Estimation With Point Supervision
Zhiheng Ma, Xing Wei, Xiaopeng Hong, and Yihong Gong. Bayesian Loss for Crowd Count Estimation With Point Supervision. InICCV, 2019. 3, 8, 9
2019
-
[35]
Distribution Matching for Crowd Counting
Boyu Wang, Huidong Liu, Dimitris Samaras, and Minh Hoai. Distribution Matching for Crowd Counting. InNeurIPS, 2020. 3, 5, 8, 9
2020
-
[36]
Learning to count via unbalanced optimal transport
Zhiheng Ma, Xing Wei, Xiaopeng Hong, Hui Lin, Yunfeng Qiu, and Yihong Gong. Learning to count via unbalanced optimal transport. InAAAI, 2021. 3
2021
-
[37]
Grundlehren der mathematischen Wis- senschaften
C ´edric Villani.Optimal Transport: Old and New. Grundlehren der mathematischen Wis- senschaften. Springer, 2009. 3 13
2009
-
[38]
Sinkhorn distances: Lightspeed computation of optimal transport
Marco Cuturi. Sinkhorn distances: Lightspeed computation of optimal transport. InNeurIPS,
-
[39]
Scaling al- gorithms for unbalanced optimal transport problems.Mathematics of Computation, 2018
L ´ena¨ıc Chizat, Gabriel Peyr´e, Bernhard Schmitzer, and Franc ¸ois-Xavier Vialard. Scaling al- gorithms for unbalanced optimal transport problems.Mathematics of Computation, 2018. 4
2018
-
[40]
Decoupled Weight Decay Regularization
Ilya Loshchilov and Frank Hutter. Decoupled Weight Decay Regularization. InICLR, 2019. 6
2019
-
[41]
Maurice Mugabowindekwe, Martin Brandt, J ´erˆome Chave, Florian Reiner, David L. Skole, Ankit Kariryaa, Christian Igel, Pierre Hiernaux, Philippe Ciais, Ole Mertz, Xiaoye Tong, Sizhuo Li, Gaspard Rwanyiziri, Thaulin Dushimiyimana, Alain Ndoli, Valens Uwizeyimana, Jens-Peter Barnekow Lillesø, Fabian Gieseke, Compton J. Tucker, Sassan Saatchi, and Rasmus Fe...
2023
-
[42]
U-Net: Convolutional networks for biomedical image segmentation
Olaf Ronneberger, Philipp Fischer, and Thomas Brox. U-Net: Convolutional networks for biomedical image segmentation. InMICCAI, 2015. 8
2015
-
[43]
Deep residual learning for image recognition
Kaiming He, Xiangyu Zhang, Shaoqing Ren, and Jian Sun. Deep residual learning for image recognition. InCVPR, 2016. 8
2016
-
[44]
Counting With Focus for Free
Zenglin Shi, Pascal Mettes, and Cees Snoek. Counting With Focus for Free. InICCV, 2019. 8
2019
-
[45]
Iterative Crowd Counting
Viresh Ranjan, Hieu Le, and Minh Hoai. Iterative Crowd Counting. InECCV, 2018. 8
2018
-
[46]
Ultralytics YOLOv8, 2023
Glenn Jocher, Ayush Chaurasia, and Jing Qiu. Ultralytics YOLOv8, 2023. URLhttps: //github.com/ultralytics/ultralytics. 8, 9
2023
-
[47]
TreeFormer: A Semi- Supervised Transformer-Based Framework for Tree Counting From a Single High-Resolution Image.TGRS, 2023
Hamed Amini Amirkolaee, Miaojing Shi, and Mark Mulligan. TreeFormer: A Semi- Supervised Transformer-Based Framework for Tree Counting From a Single High-Resolution Image.TGRS, 2023. 8, 9
2023
-
[48]
Objects as Points
Xingyi Zhou, Dequan Wang, and Philipp Kr ¨ahenb¨uhl. Objects as Points. Technical report,
-
[49]
URLhttp://arxiv.org/abs/1904.07850. 8, 9
Pith/arXiv arXiv 1904
-
[50]
Taige Luo, Wei Gao, Alexei Belotserkovsky, Alexander Nedzved, Weijie Deng, Qiaolin Ye, Liyong Fu, Qiao Chen, Wenjun Ma, and Sheng Xu. VrsNet-density map prediction network for individual tree detection and counting from UA V images.International Journal of Applied Earth Observation and Geoinformation, 131:103923, 2024. 8
2024
-
[51]
VrsNet - density map prediction network for individual tree detection and counting from UA V images.JAG, 2024
Taige Luo, Wei Gao, Alexei Belotserkovsky, Alexander Nedzved, Weijie Deng, Qiaolin Ye, Liyong Fu, Qiao Chen, Wenjun Ma, and Sheng Xu. VrsNet - density map prediction network for individual tree detection and counting from UA V images.JAG, 2024. 9
2024
-
[52]
Zhitong Xiong, Yi Wang, Fahong Zhang, Adam J Stewart, Jo ¨elle Hanna, Damian Borth, Ioan- nis Papoutsis, Bertrand Le Saux, Gustau Camps-Valls, and Xiao Xiang Zhu. Neural plasticity- inspired foundation model for observing the Earth crossing modalities.arXiv:2403.15356,
-
[53]
AnySat: An earth observation model for any resolutions, scales, and modalities
Guillaume Astruc, Nicolas Gonthier, Clement Mallet, and Loic Landrieu. AnySat: An earth observation model for any resolutions, scales, and modalities. InCVPR, 2025. 10
2025
-
[54]
Chengyu Sun, Jinyu Hu, and Hong Jiang. MAP-UOT: A memory-efficient approach to unbal- anced optimal transport implementation.arXiv:2412.11079, 2024. 11
arXiv 2024
-
[55]
van Ewijk, David I
Tommaso Jucker, John Caspersen, J ´erˆome Chave, C ´ecile Antin, Nicolas Barbier, Frans Bongers, Michele Dalponte, Karin Y . van Ewijk, David I. Forrester, Matthias Haeni, Steven I. Higgins, Robert J. Holdaway, Yoshiko Iida, Craig Lorimer, Peter L. Marshall, St´ephane Momo, Glenn R. Moncrieff, Pierre Ploton, Lourens Poorter, Kassim Abd Rahman, Michael Sch...
-
[56]
K. Yoda, T. Kira, H. Ogawa, and K. Hozumi. Self-Thinning in Overcrowded Pure Stands under Cultivated and Natural Conditions.Journal of Biology, Osaka City University, 14:107– 129, 1963. 11 14
1963
-
[57]
The overlooked contribution of trees outside forests to tree cover and woody biomass across Europe.Science Advances, 2023
Siyu Liu, Martin Brandt, Thomas Nord-Larsen, Jerome Chave, Florian Reiner, Nico Lang, Xiaoye Tong, Philippe Ciais, Christian Igel, Adrian Pascual, Juan Guerra-Hernandez, Sizhuo Li, Maurice Mugabowindekwe, Sassan Saatchi, Yuemin Yue, Zhengchao Chen, and Rasmus Fensholt. The overlooked contribution of trees outside forests to tree cover and woody biomass ac...
2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.