An Evaluation of Decentralized Group Formation Techniques for Flying Light Specks
Pith reviewed 2026-06-26 02:06 UTC · model grok-4.3
The pith
Random Subset technique forms small groups of flying light specks better than alternatives while Closest Available Neighbor First excels for large groups.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The paper demonstrates that among four decentralized group formation techniques, Random Subset (RS) outperforms the others when constructing small groups with G less than or equal to 5, while Closest Available Neighbor First (CANF) outperforms when constructing large groups with G greater than or equal to 10. The techniques are evaluated on synthetic point clouds with known optimal solutions as well as real point clouds, with each FLS implementing the technique autonomously using asynchronous communication without a global clock.
What carries the argument
The Random Subset (RS) and Closest Available Neighbor First (CANF) decentralized group formation techniques, which select group members based on random subsets or proximity without central coordination.
If this is right
- Small groups formed via RS can more reliably tolerate individual FLS failures.
- Large groups formed via CANF can more effectively apply divide-and-conquer strategies for localizing specks to render shapes.
- Haptic feedback in response to user touch can be implemented differently depending on whether groups are small or large.
- Asynchronous operation without a global clock remains viable across both small and large group sizes in point-cloud-based displays.
Where Pith is reading between the lines
- Designers of FLS systems should select the group formation method according to target group size instead of applying one method uniformly.
- The same techniques could be tested for robustness when communication delays vary or when point-cloud density changes.
- Physical hardware deployments may introduce energy or mobility constraints that alter which technique remains preferable.
- The findings could inform group formation in other drone-swarm applications that require decentralized coordination for shared tasks.
Load-bearing premise
The premise that performance differences observed on synthetic point clouds with known optimal solutions will hold for real point clouds and physical FLS deployments under asynchronous decentralized conditions.
What would settle it
Running the four techniques on physical flying light specks in an asynchronous network and observing that the performance ordering of RS and CANF reverses for the tested group sizes.
Figures
read the original abstract
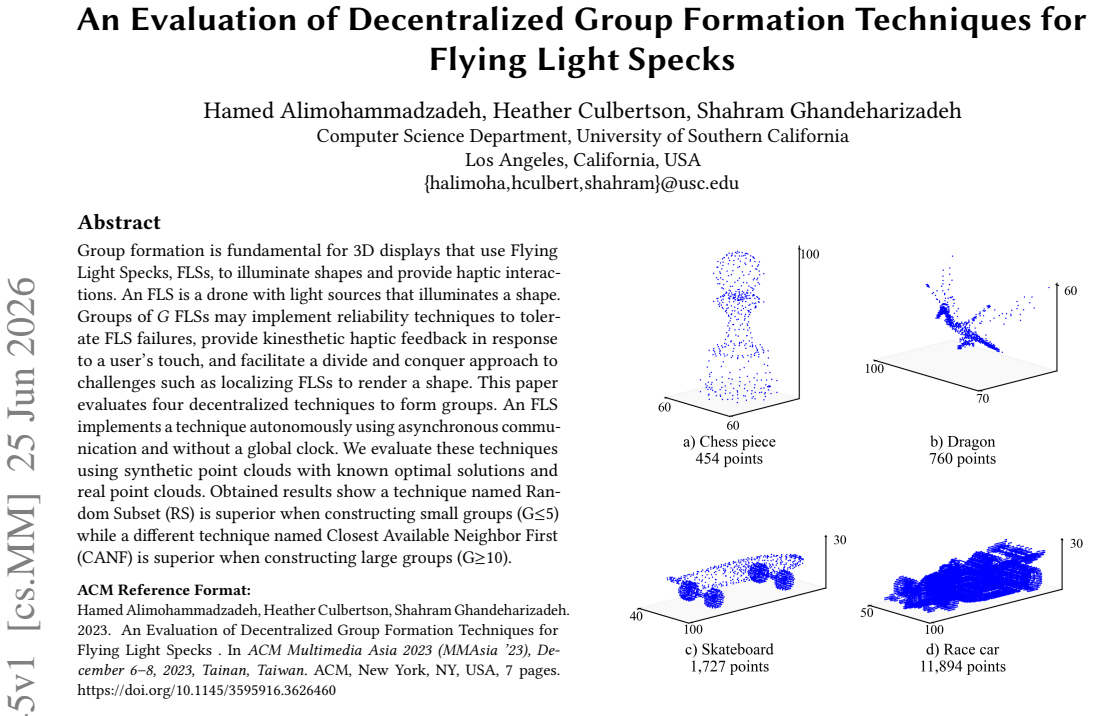
Group formation is fundamental for 3D displays that use Flying Light Specks, FLSs, to illuminate shapes and provide haptic interactions. An FLS is a drone with light sources that illuminates a shape. Groups of G FLSs may implement reliability techniques to tolerate FLS failures, provide kinesthetic haptic feedback in response to a user's touch, and facilitate a divide and conquer approach to challenges such as localizing FLSs to render a shape. This paper evaluates four decentralized techniques to form groups. An FLS implements a technique autonomously using asynchronous communication and without a global clock. We evaluate these techniques using synthetic point clouds with known optimal solutions and real point clouds. Obtained results show a technique named Random Subset (RS) is superior when constructing small groups (G $\leq$ 5) while a different technique named Closest Available Neighbor First (CANF) is superior when constructing large groups (G $\geq$ 10).
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript evaluates four decentralized techniques for forming groups of G Flying Light Specks (FLS) to support reliability, haptics, and localization in 3D displays. The techniques operate autonomously via asynchronous communication without a global clock. Experiments on synthetic point clouds (with known optima) and real point clouds lead to the claim that Random Subset (RS) is superior for small groups (G ≤ 5) while Closest Available Neighbor First (CANF) is superior for large groups (G ≥ 10).
Significance. If the reported performance ordering is reproducible and persists under realistic asynchrony and motion, the results would provide concrete guidance for choosing group-formation logic in FLS systems. The inclusion of synthetic instances with known optima is a methodological strength that allows direct assessment of solution quality.
major comments (2)
- [Abstract] Abstract: the abstract states results from synthetic and real point clouds yet provides no details on metrics, statistical tests, number of trials, or how superiority was quantified, leaving the central claim without verifiable support in the available text.
- [Evaluation setup] Evaluation setup (as described in the abstract): the headline claim (RS superior for G≤5, CANF for G≥10) is derived from experiments on static point clouds. The techniques are specified to use asynchronous communication, but the evaluation provides no evidence that message loss, timing jitter, or physical motion constraints were modeled; any observed ordering could invert once these semantics are introduced.
minor comments (1)
- [Abstract] Abstract: the notation mixes inline LaTeX (G $\<= 5$) with plain text; consistent formatting would improve readability.
Simulated Author's Rebuttal
We thank the referee for the constructive comments, which help clarify the scope and presentation of our evaluation. We address each major comment below.
read point-by-point responses
-
Referee: [Abstract] Abstract: the abstract states results from synthetic and real point clouds yet provides no details on metrics, statistical tests, number of trials, or how superiority was quantified, leaving the central claim without verifiable support in the available text.
Authors: We agree that the abstract should include more methodological detail to support the claims. In the revised version we will expand the abstract to specify the primary metric (deviation from known optima on synthetic clouds and a comparable quality measure on real clouds), the number of independent trials per configuration, and the basis for declaring superiority (consistent ranking across all tested G values and point clouds). revision: yes
-
Referee: [Evaluation setup] Evaluation setup (as described in the abstract): the headline claim (RS superior for G≤5, CANF for G≥10) is derived from experiments on static point clouds. The techniques are specified to use asynchronous communication, but the evaluation provides no evidence that message loss, timing jitter, or physical motion constraints were modeled; any observed ordering could invert once these semantics are introduced.
Authors: The present study deliberately evaluates the four techniques on static point clouds so that solution quality can be measured directly against known optima. The algorithms themselves are specified to run with asynchronous, local communication, but the reported experiments assume reliable delivery and no FLS motion. We acknowledge this as a limitation of the current evaluation; the observed ordering is therefore conditional on the static, lossless setting. We will add an explicit statement of these assumptions to the evaluation section and a dedicated paragraph in the discussion that notes the possibility of ordering changes under realistic asynchrony or motion, together with a brief outline of planned follow-on experiments that incorporate message loss and dynamics. revision: partial
Circularity Check
Pure empirical evaluation; no derivations or self-referential predictions
full rationale
The paper evaluates four decentralized group formation techniques via simulation on synthetic point clouds (with known optima) and real point clouds. Central claims consist of direct performance observations (RS superior for G≤5, CANF for G≥10) with no equations, fitted parameters, predictions, ansatzes, or uniqueness theorems. No self-citations are invoked as load-bearing support for any result. The work is self-contained against external benchmarks as an empirical comparison and contains no load-bearing steps that reduce to inputs by construction.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Hamed Alimohammadzadeh, Daryon Mehraban, and Shahram Ghandeharizadeh
-
[2]
InACM Multimedia Systems(Vancouver, Canada)(MMSys ’23)
Modeling Illumination Data with Flying Light Specks. InACM Multimedia Systems(Vancouver, Canada)(MMSys ’23). Association for Computing Machinery, New York, NY, USA. doi:10.1145/3587819.3592544
-
[3]
David Arthur and Sergei Vassilvitskii. 2007. K-Means++: The Advantages of Careful Seeding. InProceedings of the Eighteenth Annual ACM-SIAM Symposium on Discrete Algorithms(New Orleans, Louisiana)(SODA ’07). Society for Industrial and Applied Mathematics, USA, 1027–1035
2007
-
[4]
Jack Brimberg, Nenad Mladenović, Dragan Urošević, and Eric Ngai. 2009. Variable Neighborhood Search for the Heaviest k-Subgraph.Computers & Operations Research36, 11 (2009), 2885–2891. doi:10.1016/j.cor.2008.12.020
-
[5]
Anna Chmielowiec and Maarten van Steen. 2010. Optimal Decentralized Forma- tion of k-Member Partnerships. InIEEE International Conference on Self-Adaptive and Self-Organizing Systems. 154–163. doi:10.1109/SASO.2010.14
-
[6]
Anna Chmielowiec, Spyros Voulgaris, and Maarten van Steen. 2014. Decentralized Group Formation.Journal of Internet Services and Applications5, 1 (2014). doi:10. 1186/s13174-014-0012-2
2014
-
[7]
Vincent Cohen-Addad, Hossein Esfandiari, Vahab Mirrokni, and Shyam Narayanan. 2022. Improved Approximations for Euclidean K-Means and k- Median, via Nested Quasi-Independent Sets. InProceedings of the 54th An- nual ACM SIGACT Symposium on Theory of Computing(Rome, Italy)(STOC 2022). Association for Computing Machinery, New York, NY, USA, 1621–1628. doi:10...
-
[8]
Crescenzi and V
P. Crescenzi and V. Kann. 1997. Approximation on the web: A compendium of NP optimization problems. InRandomization and Approximation Techniques in Computer Science, José Rolim (Ed.). Springer Berlin Heidelberg, Berlin, Heidelberg, 111–118
1997
-
[9]
Andrzej Czygrinow and Michal Hańćkowiak. 2007. Distributed Approximations for Packing in Unit-Disk Graphs. InDistributed Computing - 21st International Symposium, DISC 2007, Proceedings (Lecture Notes in Computer Science (including subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformat- ics)). Springer Verlag, 152–164. doi:10....
-
[10]
Andrzej Czygrinow, Michal Hańckowiak, and Wojciech Wawrzyniak. 2008. Distributed Packing in Planar Graphs. InProceedings of the Twentieth Annual Symposium on Parallelism in Algorithms and Architectures(Munich, Germany) (SPAA ’08). Association for Computing Machinery, New York, NY, USA, 55–61. doi:10.1145/1378533.1378541
-
[11]
Avis David. 1983. A Survey of Heuristics for the Weighted Matching Problem. Networks13 (1983), 475–493
1983
-
[12]
Harold N. Gabow. 1990. Data Structures for Weighted Matching and Nearest Common Ancestors with Linking. InProceedings of the First Annual ACM-SIAM Symposium on Discrete Algorithms(San Francisco, California, USA)(SODA ’90). Society for Industrial and Applied Mathematics, USA, 434–443
1990
-
[13]
Shahram Ghandeharizadeh. 2021. Holodeck: Immersive 3D Displays Using Swarms of Flying Light Specks. InACM Multimedia Asia(Gold Coast, Australia). doi:10.1145/3469877.3493698
-
[14]
Shahram Ghandeharizadeh. 2022. Display of 3D Illuminations using Flying Light Specks. InACM Multimedia(Lisboa, Portugal)(MM ’22). Association for Computing Machinery, New York, NY, USA. doi:10.1145/3503161.3548250
-
[15]
P. Hell, S. Klein, L. T. Nogueira, and F. Protti. 2005. Packing r-Cliques in Weighted Chordal Graphs.Annals of Operations Research138, 1 (2005), 179–187. doi:10. 1007/s10479-005-2452-3
2005
-
[16]
Edmonds Jack. 1965. Paths, Trees, and Flowers.Canada Journal of Math.17 (1965), 449–467
1965
-
[17]
Márk Jelasity, Alberto Montresor, and Ozalp Babaoglu. 2009. T-Man: Gossip- Based Fast Overlay Topology Construction.Comput. Netw.53, 13 (aug 2009), 2321–2339. doi:10.1016/j.comnet.2009.03.013
-
[18]
Viggo Kann. 1994. Maximum Bounded H-Matching is Max SNP-Complete.Inf. Process. Lett.49, 6 (mar 1994), 309–318. doi:10.1016/0020-0190(94)90105-8
-
[19]
David G. Kirkpatrick and Pavol Hell. 1978. On the Completeness of a Generalized Matching Problem. InProceedings of the Tenth Annual ACM Symposium on Theory of Computing(San Diego, California, USA)(STOC ’78). Association for Computing Machinery, New York, NY, USA, 240–245. doi:10.1145/800133.804353
-
[20]
Dušan Knop. 2020. Partitioning Graphs into Induced Subgraphs.Discrete Applied Mathematics272 (2020), 31–42. doi:10.1016/j.dam.2019.01.010 15th Cologne–Twente Workshop on Graphs and Combinatorial Optimization (CTW 2017)
-
[21]
S. Lloyd. 1982. Least Squares Quantization in PCM.IEEE Transactions on Infor- mation Theory28, 2 (1982), 129–137. doi:10.1109/TIT.1982.1056489
-
[22]
Victor Rodrigo Mercado, Maud Marchal, and Anatole Lecuyer. 2021. Haptics On-Demand: A Survey on Encountered-Type Haptic Displays.IEEE Transactions on Haptics14, 3 (2021), 449–464
2021
-
[23]
Michael Norman, Vince Kellen, Shava Smallen, Brian DeMeulle, Shawn Strande, Ed Lazowska, Naomi Alterman, Rob Fatland, Sarah Stone, Amanda Tan, Katherine Yelick, Eric Van Dusen, and James Mitchell. 2021. CloudBank: Managed Services to Simplify Cloud Access for Computer Science Research and Education. In Practice and Experience in Advanced Research Computin...
-
[24]
Patterson, Garth Gibson, and Randy H
David A. Patterson, Garth Gibson, and Randy H. Katz. 1988. A Case for Redundant Arrays of Inexpensive Disks (RAID). InProceedings of the 1988 ACM SIGMOD International Conference on Management of Data(Chicago, Illinois, USA)(SIGMOD ’88). Association for Computing Machinery, New York, NY, USA, 109–116. doi:10. 1145/50202.50214
arXiv 1988
-
[25]
Müller, and Sandra Hirche
Markus Rank, Zhuanghua Shi, Hermann J. Müller, and Sandra Hirche. 2010. The Influence of Different Haptic Environments on Time Delay Discrimination in Force Feedback. InHaptics: Generating and Perceiving Tangible Sensations, Astrid M. L. Kappers, Jan B. F. van Erp, Wouter M. Bergmann Tiest, and Frans C. T. van der Helm (Eds.). Springer Berlin Heidelberg, ...
2010
-
[26]
Kenneth Salisbury, Francois Conti, and Federico Barbagli. 2004. Haptic Rendering: Introductory Concepts.IEEE Computer Graphics and Applications24, 2 (2004), 24–32
2004
-
[27]
Voulgaris
S. Voulgaris. 2006.Epidemic-Based Self-Organization in Peer-to-Peer Systems. Ph. D. Dissertation. Vrije Universiteit Amsterdam. Naam instelling promotie: VU Vrije Universiteit Naam instelling onderzoek: ETH
2006
-
[28]
Tutte W. 1947. The Factorization of Linear Graphs.Journal of London Mathematics Society22 (1947), 107–11
1947
-
[29]
Brian White, Jay Lepreau, Leigh Stoller, Robert Ricci, Shashi Guruprasad, Mac Newbold, Mike Hibler, Chad Barb, and Abhijeet Joglekar. 2002. An Integrated Experimental Environment for Distributed Systems and Networks.SIGOPS Oper. Syst. Rev.36, SI, 255–270. doi:10.1145/844128.844152
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.