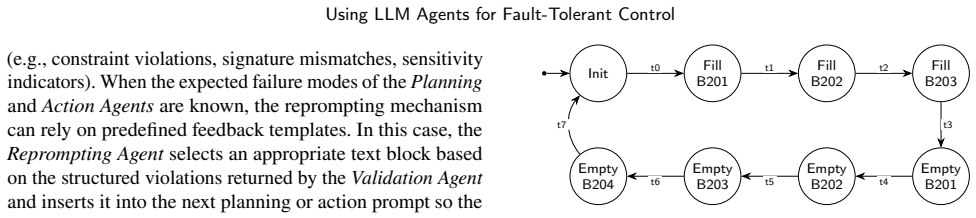
From Detection to Action: Using LLM Agents for Fault-Tolerant Control
Pith reviewed 2026-06-29 03:23 UTC · model grok-4.3
The pith
LLM agents turn fault detections into validated recovery actions for industrial processes using a digital twin and ontology graph.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
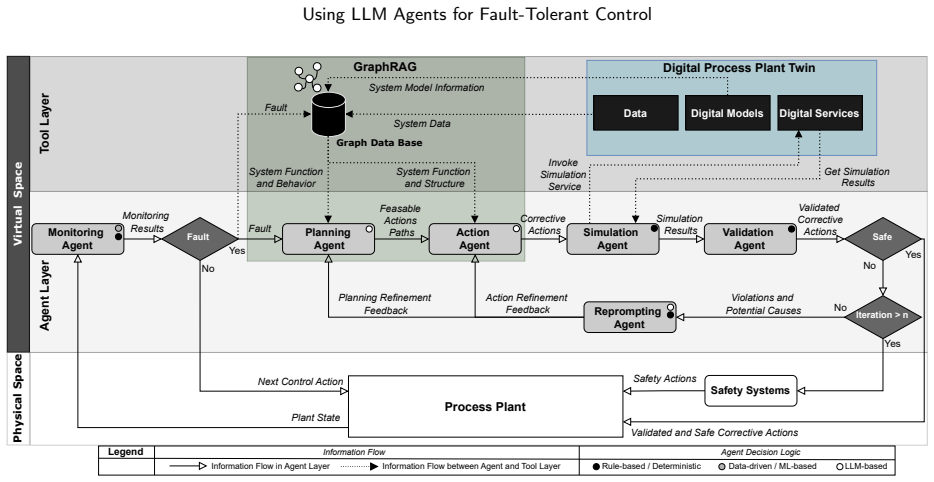
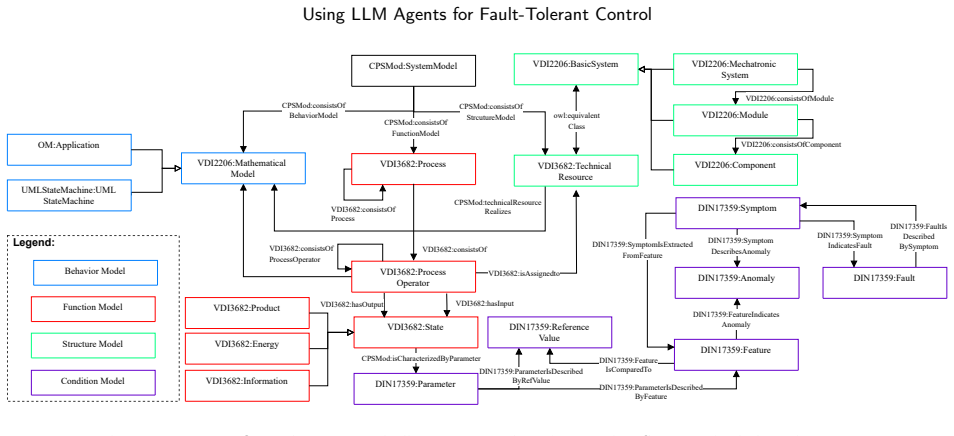
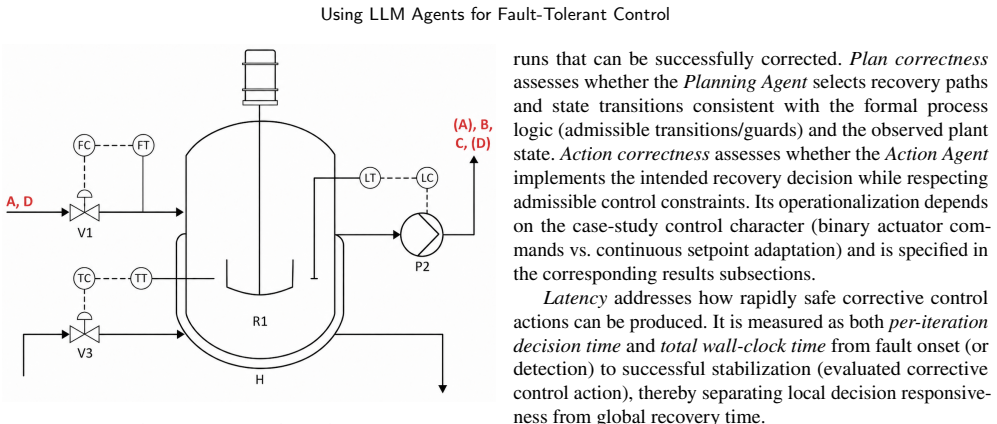
The framework couples a multi-agent workflow that breaks operator duties into monitoring, planning, synthesis, simulation, validation and reprompting with a Digital Process Plant Twin that supplies data and a simulation service and a Graph RAG layer on the CPSMod ontology that stores plant structure, hybrid dynamics, control context and fault semantics for relation-aware retrieval. Recovery actions are produced as minimal-risk state-machine paths or setpoint changes and then checked deterministically against interlocks, envelopes and dynamic feasibility before any command is issued, with handover to a safety fallback if no acceptable plan appears in time. Lightweight models succeed on both a
What carries the argument
The multi-agent workflow that decomposes duties into monitoring, planning, action synthesis, simulation, validation and reprompting, supported by Graph RAG on the CPSMod ontology for relation-aware plant knowledge and the Digital Process Plant Twin for pre-execution testing of recovery paths.
If this is right
- Lightweight LLMs can derive valid recovery decisions inside latency budgets that match the process dynamics.
- The same structure produces usable actions for both discrete batch processes and continuous processes under closed-loop PID regulation.
- Actions are validated against interlocks, envelopes and dynamic feasibility before any actuation occurs.
- Control is handed to a safety fallback whenever no acceptable plan is found inside the bounded time window.
Where Pith is reading between the lines
- The same agent-plus-twin pattern could be tested on other hybrid systems such as chemical plants or power grids if the ontology is extended with their specific relations.
- Operators might shift from direct intervention to supervising the validation step rather than generating the recovery sequence themselves.
- If the validation layer is made modular, the approach could be combined with existing model-predictive controllers to handle faults that the original controller cannot.
Load-bearing premise
The CPSMod ontology and Digital Process Plant Twin supply complete, accurate and relation-aware plant knowledge that lets the agents generate and deterministically validate recovery actions without missing critical constraints.
What would settle it
A run in which an agent-generated recovery action violates an interlock or dynamic feasibility check inside the Digital Process Plant Twin simulation, or in which the agents fail to produce any valid plan when one exists within the allotted time window.
Figures
read the original abstract
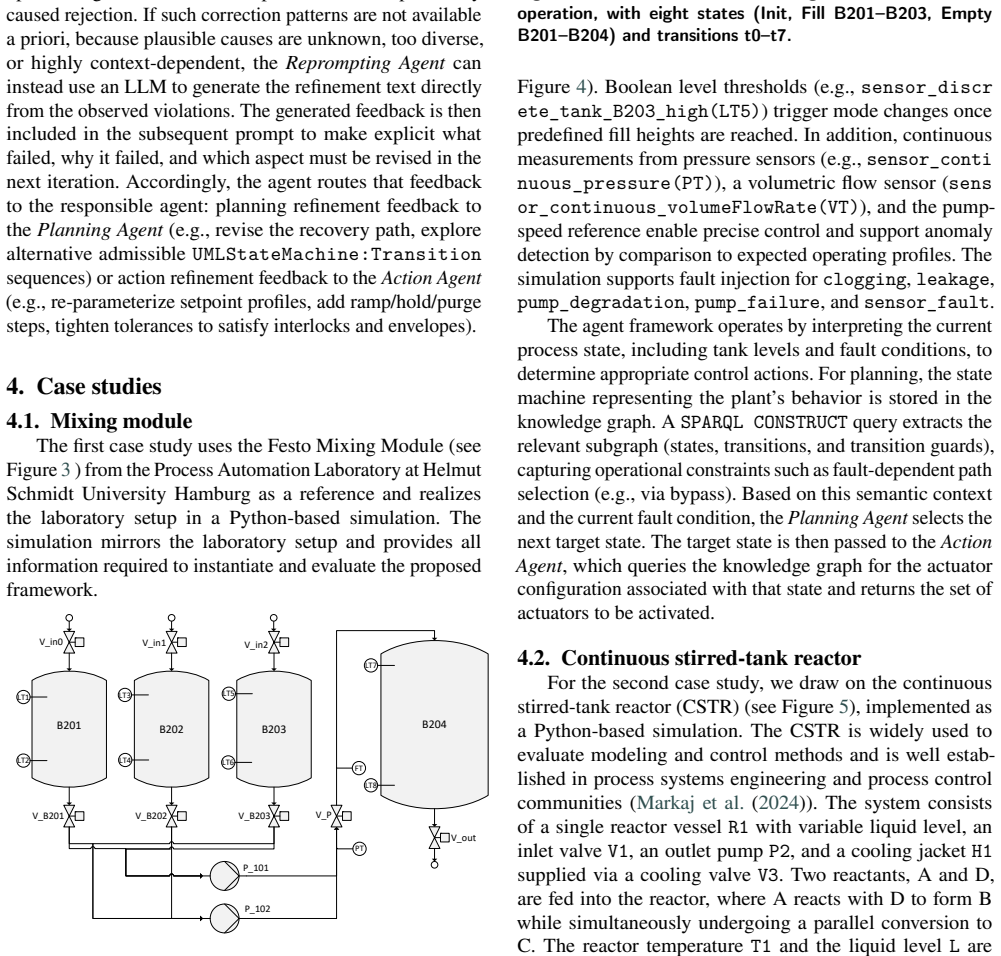
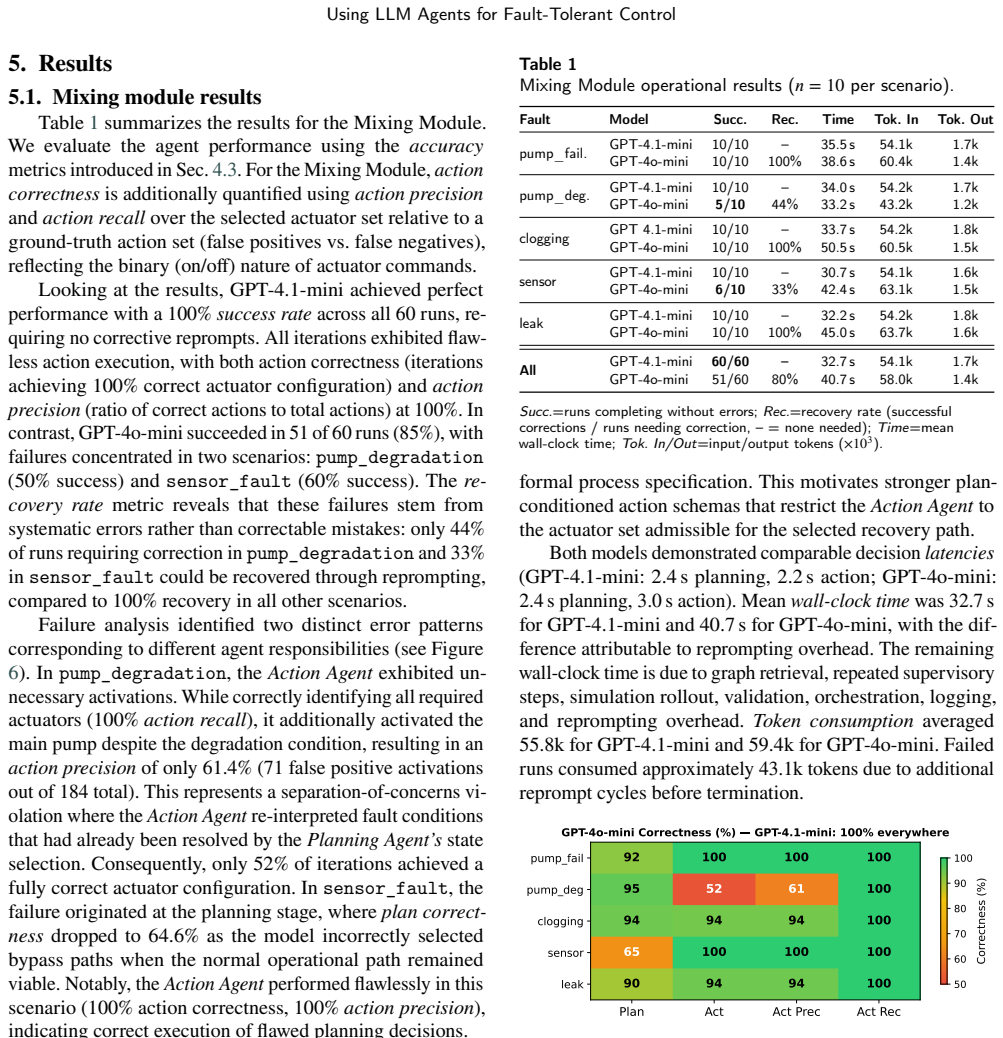
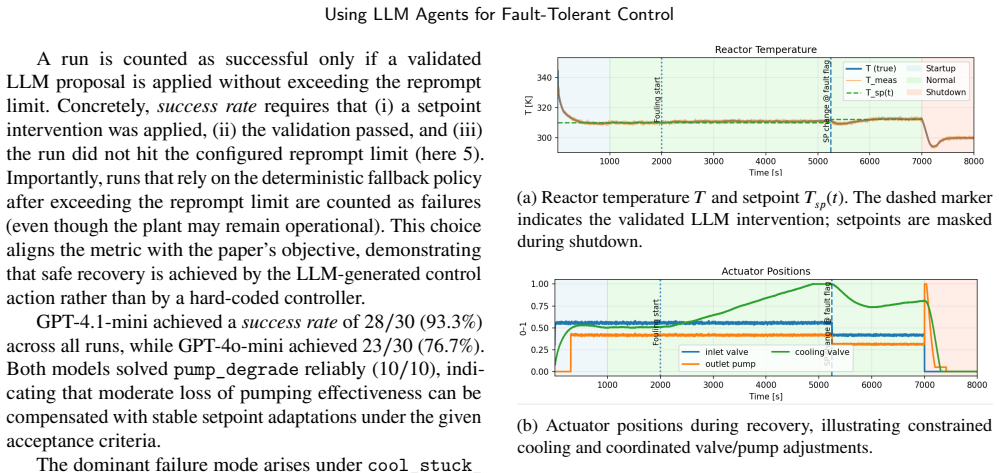
We propose an agentic Large Language Model (LLM) framework for active Fault-Tolerant Control (FTC) that transforms fault detection outputs into constraint-aware recovery actions grounded in plant-specific knowledge. The approach couples (i) a multi-agent workflow that decomposes operator duties into monitoring, planning, action synthesis, simulation, validation, and reprompting; (ii) a Digital Process Plant Twin (DPPT) that exposes plant data, models, and a simulation service for pre-execution testing; and (iii) a Graph Retrieval-Augmented Generation (Graph RAG) layer built on the CPSMod ontology, which organizes plant knowledge (structure, function, hybrid dynamics, control context, and fault semantics) into a graph that supports relation-aware, multi-hop retrieval for the agents. Corrective actions are generated as minimal-risk state-machine recovery paths and corresponding discrete commands or continuous setpoint adaptations, then validated deterministically against interlocks, envelopes, and dynamic feasibility before any actuation. If no acceptable plan is found within a bounded time window, control is handed to a safety fallback. The framework is evaluated in simulation on two representative benchmarks: a discrete batch Mixing Module and a Continuous Stirred-Tank Reactor (CSTR) under closed-loop PID regulation. Results with lightweight LLMs (GPT-4o-mini and GPT-4.1-mini) show that semantically grounded agents can derive valid recovery decisions within latency budgets compatible with the respective process dynamics, demonstrating a practical pathway from detection to validated corrective action across both discrete and continuous FTC tasks.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes an agentic LLM framework for active fault-tolerant control that couples a multi-agent workflow (monitoring, planning, action synthesis, simulation, validation, reprompting), a Digital Process Plant Twin (DPPT) for data/models/simulation, and a Graph RAG layer on the CPSMod ontology to generate minimal-risk state-machine recovery paths or setpoint adaptations. Actions are validated deterministically against interlocks, envelopes, and dynamic feasibility before actuation, with fallback to safety control if no plan is found. The framework is evaluated in simulation on a discrete batch Mixing Module and a continuous CSTR under PID regulation, with results using lightweight LLMs (GPT-4o-mini, GPT-4.1-mini) claimed to show valid recovery decisions within compatible latency budgets.
Significance. If the central claims hold, the work provides a structured, semantically grounded approach to bridging fault detection to validated corrective action in FTC, leveraging relation-aware retrieval and pre-execution simulation in a way that could complement traditional model-based methods. Strengths include the explicit decomposition of operator duties, deterministic validation step, and evaluation across both discrete and continuous benchmarks. The focus on lightweight models and bounded-time fallback also addresses practical deployment concerns.
major comments (3)
- [Abstract] Abstract: the assertion that 'semantically grounded agents can derive valid recovery decisions' and demonstrate a 'practical pathway' supplies no quantitative metrics (success rates, error rates, latency numbers, or feasibility assessment details), so the data cannot be checked against the claim.
- [Framework description] Framework description (Graph RAG layer on CPSMod ontology and DPPT): the deterministic validation step can only reject plans violating explicitly encoded constraints; the manuscript provides no quantitative coverage metrics, manual verification procedure, or ablation on missing relations for the Mixing Module or CSTR benchmarks, which is load-bearing for the validity of generated actions.
- [Evaluation section] Evaluation section (Mixing Module and CSTR benchmarks): no baseline comparisons, details on how validity or dynamic feasibility was assessed, or error rates are reported, preventing verification of the results with lightweight LLMs.
minor comments (2)
- The abstract would be strengthened by including at least one key performance number (e.g., observed latency range or success rate) to summarize the simulation outcomes.
- Ensure first-use definitions and any available references for invented entities (DPPT, CPSMod ontology) are provided to improve accessibility for readers outside the immediate subfield.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback. The comments highlight opportunities to strengthen the quantitative presentation of our results and the supporting evidence for the framework's validity. We address each major comment below and commit to revisions that will make the claims verifiable.
read point-by-point responses
-
Referee: [Abstract] Abstract: the assertion that 'semantically grounded agents can derive valid recovery decisions' and demonstrate a 'practical pathway' supplies no quantitative metrics (success rates, error rates, latency numbers, or feasibility assessment details), so the data cannot be checked against the claim.
Authors: We agree that the abstract would be strengthened by including explicit quantitative metrics. The body of the manuscript reports concrete outcomes from the two benchmarks, including the proportion of generated plans that passed validation and measured latencies for the lightweight LLMs. In the revised version we will update the abstract to summarize these metrics (e.g., success rates for valid recoveries, average latency, and fallback frequency) so that the central claims can be checked directly against the data. revision: yes
-
Referee: [Framework description] Framework description (Graph RAG layer on CPSMod ontology and DPPT): the deterministic validation step can only reject plans violating explicitly encoded constraints; the manuscript provides no quantitative coverage metrics, manual verification procedure, or ablation on missing relations for the Mixing Module or CSTR benchmarks, which is load-bearing for the validity of generated actions.
Authors: The observation is correct: the validation step is deterministic and therefore bounded by the constraints that have been encoded. We will add to the framework section (i) quantitative coverage statistics for the CPSMod relations used by each benchmark (e.g., fraction of interlocks, envelopes, and hybrid dynamics represented), (ii) a description of the manual verification procedure performed by the authors, and (iii) a short ablation that quantifies the effect of deliberately omitted relations on plan acceptance. These additions will make the scope of the validation explicit. revision: yes
-
Referee: [Evaluation section] Evaluation section (Mixing Module and CSTR benchmarks): no baseline comparisons, details on how validity or dynamic feasibility was assessed, or error rates are reported, preventing verification of the results with lightweight LLMs.
Authors: We will expand the evaluation section to include (a) baseline comparisons against a rule-based recovery heuristic and, where feasible, a model-predictive controller, (b) explicit procedural details on how validity and dynamic feasibility were assessed (cross-referencing the deterministic checks performed inside the DPPT), and (c) tabulated error rates, including the fraction of plans rejected by validation and the frequency of safety-fallback activation, for both GPT-4o-mini and GPT-4.1-mini on each benchmark. These additions will allow independent verification of the reported outcomes. revision: yes
Circularity Check
No circularity; framework proposal with external simulation benchmarks
full rationale
The paper describes an agentic LLM framework coupling multi-agent workflows, a Digital Process Plant Twin, and CPSMod ontology-based Graph RAG for generating and validating recovery actions in FTC tasks. Evaluation occurs via simulation on two independent benchmarks (Mixing Module and CSTR) with no equations, fitted parameters, predictions derived from author-defined quantities, or load-bearing self-citations. The derivation chain consists of architectural description and empirical results on external test cases; no step reduces by construction to inputs defined within the paper itself.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption The CPSMod ontology organizes plant knowledge (structure, function, hybrid dynamics, control context, fault semantics) in a form that supports relation-aware multi-hop retrieval sufficient for agent planning and validation
- domain assumption Simulation service in the DPPT can deterministically test recovery actions against interlocks, envelopes, and dynamic feasibility with sufficient fidelity
invented entities (2)
-
Digital Process Plant Twin (DPPT)
no independent evidence
-
Graph RAG layer on CPSMod ontology
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Chemical Engineering Journal 428, 130993
A reinforcement learning- based economic model predictive control framework for autonomous operation of chemical reactors. Chemical Engineering Journal 428, 130993. doi:10.1016/j.cej.2021.130993. Baldea, M., Georgiou, A.T., Gopaluni, B., Mercangöz, M., Pantelides, C.C., Sheth, K., Zavala, V.M., Georgakis, C.,
-
[2]
Computers & Chemical Engineering 196, 109064
From automated to autonomous process operations. Computers & Chemical Engineering 196, 109064. doi:https://doi.org/10.1016/j.compchemeng.20 25.109064. Bloor, M., Ahmed, A., Kotecha, N., Mercangöz, M., Tsay, C., del Río- Chanona, E.A.,
-
[3]
Industrial & Engineering Chemistry Research URL: https://pubs.acs.org/doi/10.1021/acs.iecr.4c03233
Control-informed reinforcement learning for chemical processes. Industrial & Engineering Chemistry Research URL: https://pubs.acs.org/doi/10.1021/acs.iecr.4c03233. Gill, M.S., Jeleniewski, T., Gehlhoff, F., Fay, A., 2025a. Representing time- continuous behavior of cyber-physical systems in knowledge graphs, in: 2025 IEEE 30th International Conference on E...
-
[4]
Method for selecting Digital Twins of Entities in a System-of-Systems approach based on essential Information Attributes, in: 2022 IEEE 27th International Conference on Emerging Technologies and Factory Automation (ETFA), IEEE. pp. 1–8. doi:10.1109/ETFA52439.2022.9921489. Gill, M.S., Vyas, J., Markaj, A., Gehlhoff, F., Mercangöz, M., 2025b. Leveraging llm...
-
[5]
Integrating Ontology Design with the CRISP-DM in the Context of Cyber-Physical Systems Maintenance, in: 2024 IEEE 29th ETFA, IEEE. pp. 1–8. doi:10.1109/ETFA61755.2024.10710898. Gowaikar, S., Iyengar, S., Segal, S., Kalyanaraman, S.,
-
[6]
An Agentic Approach to Automatic Creation of P&ID Diagrams from Natural Language Descriptions. doi:arXiv:2412.12898. Hildebrandt, C., Köcher, A., Kustner, C., Lopez-Enriquez, C.M., Muller, A.W., Caesar, B., Gundlach, C.S., Fay, A.,
-
[7]
Ontology Building for Cyber–Physical Systems: Application in the Manufacturing Domain. IEEE T-ASE 17, 1266–1282. doi:10.1109/TASE.2020.2991777. Jobs, N., da Silva, L.M.V., Somashekaraiah, J., Weigand, M., Kube, D., Gehlhoff, F.,
-
[8]
URL: https://arxiv.org/abs/2512.03955,arXiv:2512.03955
Benchmark for planning and control with large language model agents: Blocksworld with model context protocol. URL: https://arxiv.org/abs/2512.03955,arXiv:2512.03955. Kritzinger, W., Karner, M., Traar, G., Henjes, J., Sihn, W.,
-
[9]
Development of autonomous operation agent for normal and emergency situations in nuclear power plants, in: 2021 5th International Conference on System Reliability and Safety (ICSRS), IEEE. pp. 240–247. doi:10.1109/ICSRS53853.2021. 9660722. Lee, D., Lee, J., Shin, D.,
-
[10]
Korean Journal of Chemical Engineering 41, 3263–3286
GPT Prompt Engineering for a Large Lan- guage Model-Based Process Improvement Generation System. Korean Journal of Chemical Engineering 41, 3263–3286. doi:10.1007/s118 14-024-00276-1. Manca, G., Fay, A.,
-
[11]
Detection of Historical Alarm Subsequences Using Alarm Events and a Coactivation Constraint. IEEE Access 9, 46851–46873. doi:10.1109/ACCESS.2021.3067837. Manee, V., Baratti, R., Romagnoli, J.,
-
[12]
Computers & Chemical Engineering 189, 108798
Design and implementation of an Autonomous Systems Training Environment framework for control algorithm evaluation in autonomous plant operation. Computers & Chemical Engineering 189, 108798. doi:10.1016/j.compchemen g.2024.108798. Olivier, L.E., Craig, I.K.,
-
[13]
IFAC-PapersOnLine 50, 1157–1162
Model-based fault-tolerant control with robustness to unanticipated faults. IFAC-PapersOnLine 50, 1157–1162. doi:10.1016/j.ifacol.2017.08.401. Ovalle, D., Seth, A., Kitchin, J.R., Laird, C.D., Grossmann, I.E.,
-
[14]
Multi- Agent LLMs for Automating Sustainable Operational Decision-Making, in: van Impe, J., Lonard, G., Bhonsale, S.S., Polanska, M., Logist, F. (Eds.),Proceedingsofthe35thEuropeanSymposiumonComputerAided Process Engineering (ESCAPE 35), PSE PressHamilton, Canada. pp. 1824–1829. doi:10.69997/sct.156776. Reif, J., Jeleniewski, T., Gill, M.S., Gehlhoff, F.,...
-
[15]
Chatbot- based ontology interaction using large language models and domain- specific standards, in: 2024 IEEE 29th International Conference on Emerging Technologies and Factory Automation (ETFA), pp. 1–4. doi:10.1109/ETFA61755.2024.10711065. Reinpold, L.M., Wagner, L.P., Gehlhoff, F., Ramonat, M., Kilthau, M., Gill, M.S.,Reif,J.T.,Henkel,V.,Scholz,L.,Fay,...
-
[16]
Current Opinion in Chemical Engineering 51, 101209
Multi-agent systems for chemical engineering: a review and perspective. Current Opinion in Chemical Engineering 51, 101209. doi:https://doi.org/ 10.1016/j.coche.2025.101209. Sakhinana, S.S., Sri Vaikunth, V., Runkana, V.,
-
[17]
arXiv preprint URL:https://arxiv.org/abs/2306.03099
Crystalgpt: Enhancing system-to-system transferabilityofreinforcementlearningagentsforcrystallizationcontrol. arXiv preprint URL:https://arxiv.org/abs/2306.03099. Song, L., Zhang, C., Zhao, L., Bian, J.,
-
[18]
URL:https://arxiv.org/abs/2308 .03028, doi:10.48550/ARXIV.2308.03028
Pre-trained large language models for industrial control. URL:https://arxiv.org/abs/2308 .03028, doi:10.48550/ARXIV.2308.03028. Srinivas,S.S.,Gupta,S.,Runkana,V.,2025. Autochemschematicai:Agentic physics-aware automation for chemical manufacturing scale-up. URL: https://arxiv.org/abs/2505.24584,arXiv:2505.24584. Tang,X.,Tian,Y.,D.,V.S.,2024. Recentadvance...
-
[19]
doi:10.1109/TII.2018.2873186. Vyas, J., Mercangöz, M.,
-
[20]
Autonomous Industrial Control using an Agentic Framework with Large Language Models. IFAC-PapersOnLine 59, 349–354. doi:10.1016/j.ifacol.2025.07.170. Webert, H., Döß, T., Kaupp, L., Simons, S.,
-
[21]
Xia,Y.,Jazdi,N.,Zhang,J.,Shah,C.,Weyrich,M.,2025
doi:10.3390/s22062205. Xia,Y.,Jazdi,N.,Zhang,J.,Shah,C.,Weyrich,M.,2025. Controlindustrial automation system with large language model agents, in: 2025 IEEE 30th International Conference on Emerging Technologies and Factory Automation (ETFA), pp. 1–8. doi:10.1109/ETFA65518.2025.11205
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.