MyGO-Splat: Multi-Objective Closed-Loop Geometric Feedback for RGB-Only Gaussian SLAM
Pith reviewed 2026-06-30 06:36 UTC · model grok-4.3
The pith
Closed-loop feedback from rasterized Gaussian depth and normals corrects monocular SLAM poses and scale to reach RGB-D performance.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
MyGO-Splat establishes that analytically rasterized depth and surface normals from 3D Gaussian primitives can be fed back to supervise and correct camera pose optimization in real time, while scale-aware adaptive alignment projects foundation-model depth estimates into the globally consistent Gaussian space, forming a closed feedback cycle that improves scale stability and appearance-geometry consistency to levels comparable with RGB-D methods on monocular input alone.
What carries the argument
Analytically rasterized depth and surface normals from Gaussian primitives that actively supervise camera pose optimization inside a closed loop, together with scale-aware adaptive alignment of monocular priors.
If this is right
- The Gaussian map becomes a real-time geometric supervisor rather than only a rendering target.
- Scale consistency is enforced by projecting external depth estimates into the already optimized Gaussian frame on each cycle.
- Appearance and geometry remain aligned because the same primitives supply both photometric and geometric signals.
- Monocular input suffices for performance previously associated with direct depth sensors.
- The system runs in real time because the rasterization and alignment steps reuse existing Gaussian rendering pipelines.
Where Pith is reading between the lines
- The same rasterization-based feedback could be applied to other differentiable scene representations that produce depth and normals.
- Tighter integration of foundation-model depth with the SLAM optimization loop may reduce the need for separate sensor fusion stages in robotics.
- If the loop remains stable over very long trajectories, the method could support extended autonomous operation without periodic global resets.
Load-bearing premise
The depth and normals produced by rasterizing the Gaussian map are accurate and stable enough to correct poses without creating new drift that the same loop cannot remove.
What would settle it
A long monocular sequence in which the closed-loop corrections produce larger scale drift or higher trajectory error than an open-loop Gaussian baseline or an RGB-D reference method with ground-truth depth.
Figures

read the original abstract
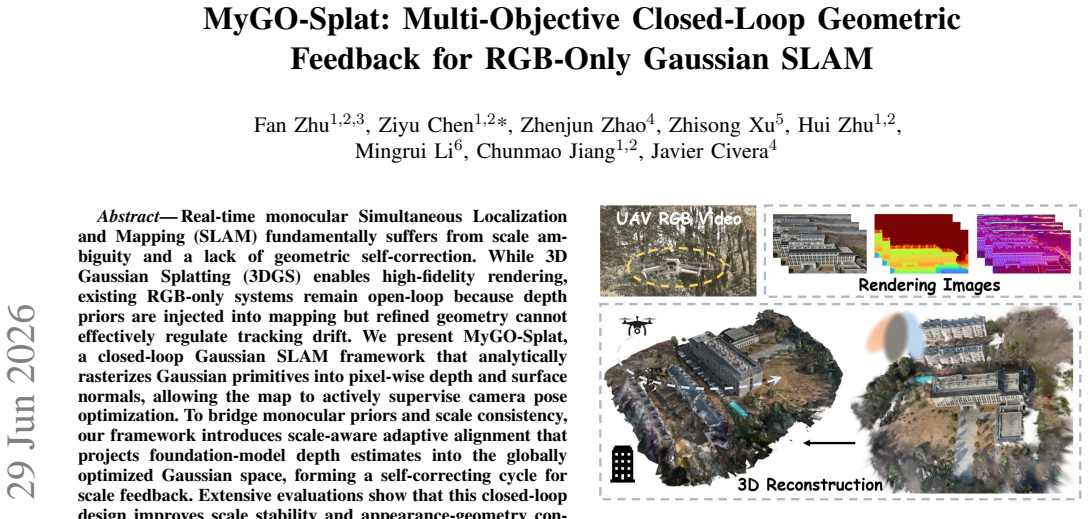
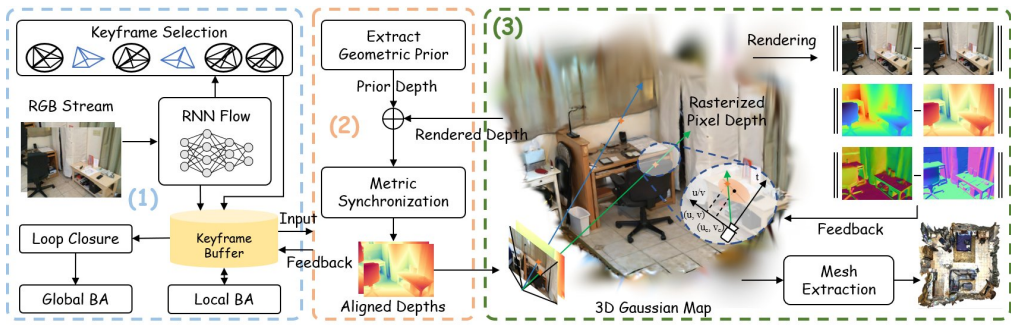
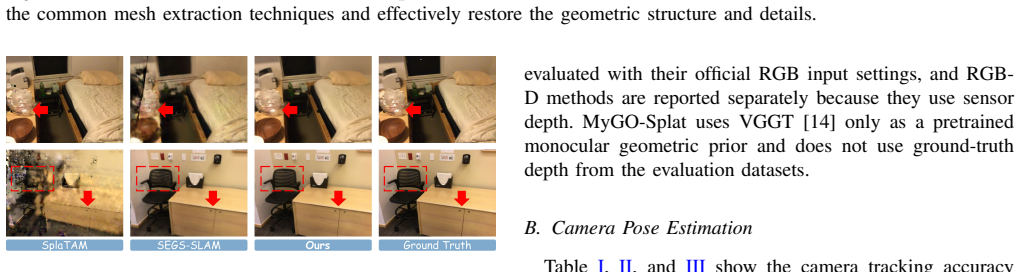
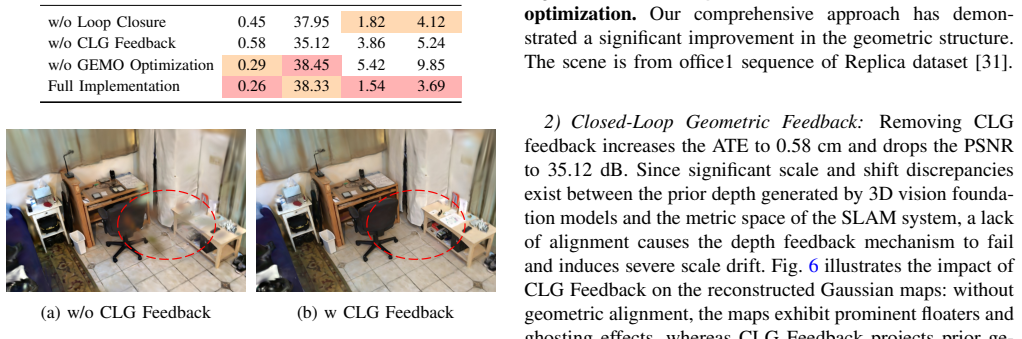
Real-time monocular Simultaneous Localization and Mapping (SLAM) fundamentally suffers from scale ambiguity and a lack of geometric self-correction. While 3D Gaussian Splatting (3DGS) enables high-fidelity rendering, existing RGB-only systems remain open-loop because depth priors are injected into mapping but refined geometry cannot effectively regulate tracking drift. We present MyGO-Splat, a closed-loop Gaussian SLAM framework that analytically rasterizes Gaussian primitives into pixel-wise depth and surface normals, allowing the map to actively supervise camera pose optimization. To bridge monocular priors and scale consistency, our framework introduces scale-aware adaptive alignment that projects foundation-model depth estimates into the globally optimized Gaussian space, forming a self-correcting cycle for scale feedback. Extensive evaluations show that this closed-loop design improves scale stability and appearance-geometry consistency, achieving performance comparable to RGB-D methods while using only monocular input.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces MyGO-Splat, a closed-loop RGB-only Gaussian SLAM system that analytically rasterizes 3D Gaussian primitives to obtain depth and surface normals for supervising camera pose optimization. It incorporates scale-aware adaptive alignment using foundation model depth estimates to maintain scale consistency, claiming to achieve performance comparable to RGB-D SLAM methods through this self-correcting geometric feedback loop.
Significance. If validated, the approach could significantly advance monocular SLAM by enabling geometric self-correction without depth sensors, improving scale stability and consistency in real-time applications. The integration of differentiable rendering for active geometric supervision represents a promising direction for bridging appearance-based mapping with pose estimation.
major comments (2)
- [Abstract] Abstract: The abstract claims 'extensive evaluations' demonstrating improved scale stability and performance comparable to RGB-D methods, but provides no quantitative results, error bars, datasets, metrics, or ablation details to support this central performance claim.
- [Method] Method (no equations visible): The description of the closed-loop geometric feedback via rasterized depth/normals lacks any derivation or stability analysis; it is therefore impossible to verify whether the combined loss remains contractive or whether appearance-driven Gaussians can supply corrective signals without amplifying monocular drift.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive report. We address each major comment below and will incorporate revisions to strengthen the manuscript.
read point-by-point responses
-
Referee: [Abstract] Abstract: The abstract claims 'extensive evaluations' demonstrating improved scale stability and performance comparable to RGB-D methods, but provides no quantitative results, error bars, datasets, metrics, or ablation details to support this central performance claim.
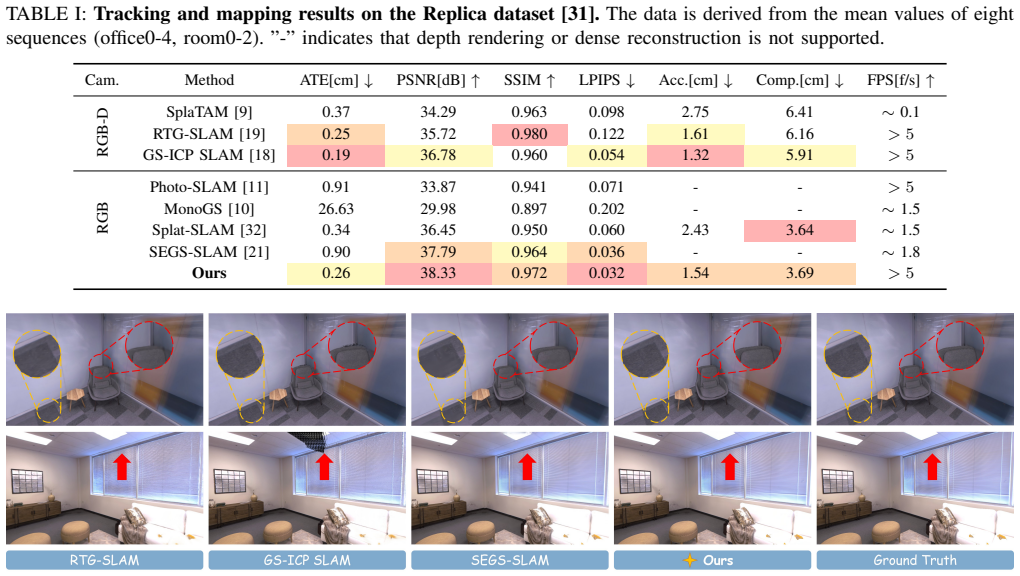
Authors: We agree that the abstract would be strengthened by including concrete quantitative support for the performance claims. In the revised manuscript we will update the abstract to report key metrics (e.g., ATE on TUM and Replica), datasets used, and direct comparisons against representative RGB-D baselines, together with a brief mention of the ablation studies that quantify the contribution of the closed-loop geometric feedback. revision: yes
-
Referee: [Method] Method (no equations visible): The description of the closed-loop geometric feedback via rasterized depth/normals lacks any derivation or stability analysis; it is therefore impossible to verify whether the combined loss remains contractive or whether appearance-driven Gaussians can supply corrective signals without amplifying monocular drift.
Authors: The submitted manuscript contains the analytic rasterization equations for depth and normals (Section 3.2) and the multi-objective loss formulation (Equations 4–7). However, we acknowledge that a formal stability or contractiveness argument is absent. We will add a short subsection in the revision that derives the geometric supervision terms, discusses the conditions under which the combined loss remains contractive, and provides a brief analysis of drift amplification risk, supported by additional ablation results on scale drift. revision: yes
Circularity Check
No circularity; derivation chain self-contained
full rationale
The abstract and description present a closed-loop Gaussian SLAM framework relying on rasterized depth/normals for pose supervision and scale-aware alignment, but contain no equations, derivations, or parameter fits that reduce to their own inputs by construction. No self-citations, uniqueness theorems, or ansatzes are invoked in the provided text. The central claims rest on empirical performance comparisons rather than any load-bearing mathematical reduction, making the work self-contained against external benchmarks as expected for the majority of papers.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Slam handbook: From localization and mapping to spatial intelligence,
L. Carlone, A. Kim, T. Barfoot, D. Cremers, and F. Dellaert, “Slam handbook: From localization and mapping to spatial intelligence,” 2025
2025
-
[2]
SAGE: Spatial-visual adaptive graph exploration for efficient visual place recognition,
S. Chen, C. Wang, R. Xu, Peixingtian, yukun Song, J. Lin, W. Xu, jingyizhang, L. Guo, and S. Xu, “SAGE: Spatial-visual adaptive graph exploration for efficient visual place recognition,” inThe 14 International Conference on Learning Representations, 2026
2026
-
[3]
Ige-lio: Intensity gradient enhanced tightly coupled lidar-inertial odometry,
Z. Chen, H. Zhu, B. Yu, C. Jiang, C. Hua, X. Fu, and X. Kuang, “Ige-lio: Intensity gradient enhanced tightly coupled lidar-inertial odometry,”IEEE Transactions on Instrumentation and Measurement, vol. 73, pp. 1–11, 2024
2024
-
[4]
Advances in global solvers for 3d vision,
Z. Zhao, H. Yang, B. Liao, Y . Zeng, S. Yan, Y . Gu, P. Liu, Y . Zhou, H. Li, and J. Civera, “Advances in global solvers for 3d vision,”arXiv preprint arXiv:2602.14662, 2026
-
[5]
Nerf: Representing scenes as neural radiance fields for view synthesis,
B. Mildenhall, P. P. Srinivasan, M. Tancik, J. T. Barron, R. Ramamoor- thi, and R. Ng, “Nerf: Representing scenes as neural radiance fields for view synthesis,”Communications of the ACM, vol. 65, no. 1, pp. 99–106, 2022
2022
-
[6]
3d gaussian splatting for real-time radiance field rendering,
B. Kerbl, G. Kopanas, T. Leimk ¨uhler, and G. Drettakis, “3d gaussian splatting for real-time radiance field rendering,”ACM Transactions on Graphics, vol. 42, no. 4, pp. 1–14, 2023
2023
-
[7]
Ulf- loc: Unbiased landmark feature for robust visual localization with 3d gaussian splatting,
Y . Gu, S. Yan, Z. Zhao, Y . Kou, J. Luo, P. Shi, and J. Li, “Ulf- loc: Unbiased landmark feature for robust visual localization with 3d gaussian splatting,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2026
2026
-
[8]
PanoImager: Geometry-Guided Novel View Synthesis and Reconstruction from Sparse Panoramic Views
Z. Xu and T. Oishi, “Panoimager: Geometry-guided novel view synthesis and reconstruction from sparse panoramic views,”arXiv preprint arXiv:2606.27071, 2026
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[9]
Splatam: Splat track & map 3d gaussians for dense rgb-d slam,
N. Keetha, J. Karhade, K. M. Jatavallabhula, G. Yang, S. Scherer, D. Ramanan, and J. Luiten, “Splatam: Splat track & map 3d gaussians for dense rgb-d slam,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2024, Conference Proceedings, pp. 21 357–21 366
2024
-
[10]
Gaussian splatting slam,
H. Matsuki, R. Murai, P. H. Kelly, and A. J. Davison, “Gaussian splatting slam,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2024, Conference Proceedings, pp. 18 039–18 048
2024
-
[11]
Photo-slam: Real-time simultaneous localization and photorealistic mapping for monocular stereo and rgb-d cameras,
H. Huang, L. Li, H. Cheng, and S.-K. Yeung, “Photo-slam: Real-time simultaneous localization and photorealistic mapping for monocular stereo and rgb-d cameras,” inProceedings of the IEEE/CVF Con- ference on Computer Vision and Pattern Recognition (CVPR), 2024, Conference Proceedings, pp. 21 584–21 593
2024
-
[12]
Hi-slam2: Geometry-aware gaussian slam for fast monocular scene reconstruction,
W. Zhang, Q. Cheng, D. Skuddis, N. Zeller, D. Cremers, and N. Haala, “Hi-slam2: Geometry-aware gaussian slam for fast monocular scene reconstruction,”IEEE Transactions on Robotics, vol. 41, pp. 6478– 6493, 2025
2025
-
[13]
Dust3r: Geometric 3d vision made easy,
S. Wang, V . Leroy, Y . Cabon, B. Chidlovskii, and J. Revaud, “Dust3r: Geometric 3d vision made easy,” inProceedings of the Computer Vision and Pattern Recognition Conference (CVPR), 2024, pp. 20 697– 20 709
2024
-
[14]
Vggt: Visual geometry grounded transformer,
J. Wang, M. Chen, N. Karaev, A. Vedaldi, C. Rupprecht, and D. Novotny, “Vggt: Visual geometry grounded transformer,” inPro- ceedings of the Computer Vision and Pattern Recognition Conference (CVPR), 2025, pp. 5294–5306
2025
-
[15]
Bundle- fusion: Real-time globally consistent 3d reconstruction using on-the- fly surface reintegration,
A. Dai, M. Nießner, M. Zollh ¨ofer, S. Izadi, and C. Theobalt, “Bundle- fusion: Real-time globally consistent 3d reconstruction using on-the- fly surface reintegration,”ACM Transactions on Graphics, vol. 36, no. 4, p. 1, 2017
2017
-
[16]
Imap: Implicit map- ping and positioning in real-time,
E. Sucar, S. K. Liu, J. Ortiz, and A. J. Davison, “Imap: Implicit map- ping and positioning in real-time,” inProceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), 2021, Confer- ence Proceedings, pp. 6209–6218
2021
-
[17]
Nice-slam: Neural implicit scalable encoding for slam,
Z. Zhu, S. Peng, V . Larsson, W. Xu, H. Bao, Z. Cui, M. R. Oswald, and M. Pollefeys, “Nice-slam: Neural implicit scalable encoding for slam,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2022, Conference Proceedings, pp. 12 776–12 786
2022
-
[18]
Rgbd gs-icp slam,
S. Ha, J. Yeon, and H. Yu, “Rgbd gs-icp slam,” inProceedings of the European Conference on Computer Vision (ECCV). Springer, 2024, pp. 180–197
2024
-
[19]
Rtg-slam: Real-time 3d reconstruction at scale using gaussian splat- ting,
Z. Peng, T. Shao, Y . Liu, J. Zhou, Y . Yang, J. Wang, and K. Zhou, “Rtg-slam: Real-time 3d reconstruction at scale using gaussian splat- ting,” inACM SIGGRAPH, 2024, Conference Proceedings, pp. 1–11
2024
-
[20]
MMD-SLAM: Structure-Enhanced Multi-Meta Gaussian Distribution-Guided Visual SLAM
F. Zhu, Z. Chen, P. Liu, Y . Zhao, Z. Xu, H. Zhu, H. Zhou, S. Liu, and C. Jiang, “Mmd-slam: Structure-enhanced multi-meta gaussian distribution-guided visual slam,”arXiv preprint arXiv:2606.19874, 2026
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[21]
Segs-slam: Structure-enhanced 3d gaus- sian splatting slam with appearance embedding,
T. Wen, Z. Liu, and Y . Fang, “Segs-slam: Structure-enhanced 3d gaus- sian splatting slam with appearance embedding,” inProceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), 2025, pp. 28 103–28 113
2025
-
[22]
Fgo-slam: Enhancing gaussian slam with globally consistent opacity radiance field,
F. Zhu, Y . Zhao, Z. Chen, B. Yu, and H. Zhu, “Fgo-slam: Enhancing gaussian slam with globally consistent opacity radiance field,” in2025 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2025, pp. 11 075–11 081
2025
-
[23]
Slam- x: Generalizable dynamic removal for nerf and gaussian splatting slam,
M. Li, D. Li, S. Hu, K. Wang, Z. Zhao, and H. Wang, “Slam- x: Generalizable dynamic removal for nerf and gaussian splatting slam,” inProceedings of the 33rd ACM International Conference on Multimedia, 2025, pp. 1132–1140
2025
-
[24]
Garad-slam: 3d gaussian splatting for real-time anti dynamic slam,
M. Li, W. Chen, N. Cheng, J. Xu, D. Li, and H. Wang, “Garad-slam: 3d gaussian splatting for real-time anti dynamic slam,” in2025 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2025, pp. 11 047–11 053
2025
-
[25]
Dygs- slam: Realistic map reconstruction in dynamic scenes based on double- constrained visual slam,
F. Zhu, Y . Zhao, Z. Chen, C. Jiang, H. Zhu, and X. Hu, “Dygs- slam: Realistic map reconstruction in dynamic scenes based on double- constrained visual slam,”Remote Sensing, vol. 17, no. 4, p. 625, 2025
2025
-
[26]
Droid-slam: Deep visual slam for monocular, stereo, and rgb-d cameras,
Z. Teed and J. Deng, “Droid-slam: Deep visual slam for monocular, stereo, and rgb-d cameras,”Advances in Neural Information Process- ing Systems, vol. 34, pp. 16 558–16 569, 2021
2021
-
[27]
FrameVGGT: Coherence-Preserving Memory for Bounded Streaming Geometry
Z. Xu and T. Oishi, “Framevggt: Frame evidence rolling memory for streaming vggt,”arXiv preprint arXiv:2603.07690, 2026
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[28]
Eigenplaces: Training viewpoint robust models for visual place recognition,
G. Berton, G. Trivigno, B. Caputo, and C. Masone, “Eigenplaces: Training viewpoint robust models for visual place recognition,” in Proceedings of the IEEE/CVF International Conference on Computer Vision, 2023, pp. 11 080–11 090
2023
-
[29]
The faiss library,
M. Douze, A. Guzhva, C. Deng, J. Johnson, G. Szilvasy, P.-E. Mazar ´e, M. Lomeli, L. Hosseini, and H. J ´egou, “The faiss library,”IEEE Transactions on Big Data, 2025
2025
-
[30]
Droid-splat combining end-to-end slam with 3d gaussian splatting,
C. Homeyer, L. Begiristain, and C. Schn ¨orr, “Droid-splat combining end-to-end slam with 3d gaussian splatting,” inProceedings of the IEEE/CVF International Conference on Computer Vision, 2025, pp. 2767–2777
2025
-
[31]
The Replica Dataset: A Digital Replica of Indoor Spaces
J. Straub, T. Whelan, L. Ma, Y . Chen, E. Wijmans, S. Green, J. J. Engel, R. Mur-Artal, C. Ren, and S. Verma, “The replica dataset: A digital replica of indoor spaces,”arXiv preprint arXiv:1906.05797, 2019
work page internal anchor Pith review Pith/arXiv arXiv 1906
-
[32]
Splat-slam: Globally optimized rgb-only slam with 3d gaussians,
E. Sandstr ¨om, G. Zhang, K. Tateno, M. Oechsle, M. Niemeyer, Y . Zhang, M. Patel, L. Van Gool, M. Oswald, and F. Tombari, “Splat-slam: Globally optimized rgb-only slam with 3d gaussians,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) Workshops, June 2025, pp. 1686–1697
2025
-
[33]
Pseudo depth meets gaussian: A feed-forward rgb slam baseline,
L. Zhao, X. Xu, Y . Wang, H. Wang, W. Zheng, Y . Tang, H. Yan, and J. Lu, “Pseudo depth meets gaussian: A feed-forward rgb slam baseline,” in2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2025, pp. 8142–8149
2025
-
[34]
Gaussian opacity fields: Efficient adaptive surface reconstruction in unbounded scenes,
Z. Yu, T. Sattler, and A. Geiger, “Gaussian opacity fields: Efficient adaptive surface reconstruction in unbounded scenes,”ACM Transac- tions on Graphics (ToG), vol. 43, no. 6, pp. 1–13, 2024
2024
-
[35]
Rade-gs: Rasterizing depth in gaussian splatting,
B. Zhang, C. Fang, R. Shrestha, Y . Liang, X.-X. Long, and P. Tan, “Rade-gs: Rasterizing depth in gaussian splatting,”ACM Transactions on Graphics, vol. 45, no. 2, pp. 1–14, 2026
2026
-
[36]
A benchmark for the evaluation of rgb-d slam systems,
J. Sturm, N. Engelhard, F. Endres, W. Burgard, and D. Cremers, “A benchmark for the evaluation of rgb-d slam systems,” in2012 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2012, Conference Proceedings, pp. 573–580
2012
-
[37]
Scannet: Richly-annotated 3d reconstructions of indoor scenes,
A. Dai, A. X. Chang, M. Savva, M. Halber, T. Funkhouser, and M. Nießner, “Scannet: Richly-annotated 3d reconstructions of indoor scenes,” inProceedings of the IEEE/CVF Conference on Computer Vi- sion and Pattern Recognition (CVPR), 2017, Conference Proceedings, pp. 5828–5839
2017
-
[38]
Mip-splatting: Alias-free 3d gaussian splatting,
Z. Yu, A. Chen, B. Huang, T. Sattler, and A. Geiger, “Mip-splatting: Alias-free 3d gaussian splatting,” inProceedings of the IEEE/CVF conference on computer vision and pattern recognition, 2024, pp. 19 447–19 456
2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.