AERIS: Aerial-Edge Role-Driven Intelligence at Runtime via Orchestrated Language-Model Swarm
Pith reviewed 2026-06-30 05:34 UTC · model grok-4.3
The pith
AERIS uses dynamic roles for small language models to decompose long instructions and sustain real-time UAV control loops under heartbeat constraints.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
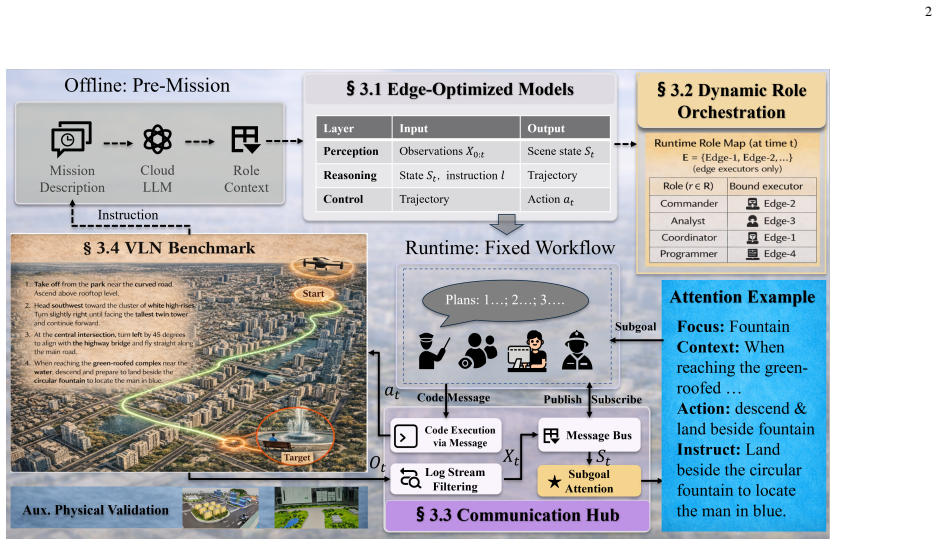
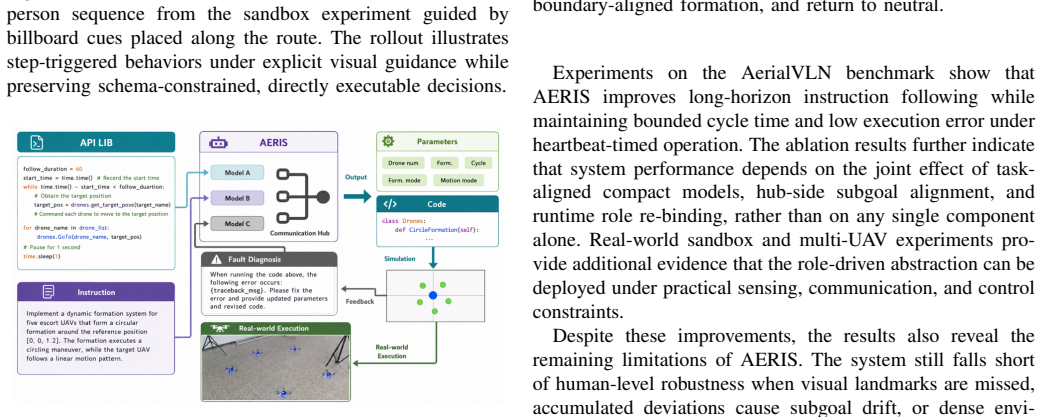
AERIS organizes dedicated small language models combined with lightweight perception and control modules into roles that can be instantiated at runtime and dynamically rebound across different executors as resources change. It achieves long-horizon instruction decomposition through an attention-subgoal alignment mechanism that annotates the currently active instruction step in messages, thereby progressively approaching long-term objectives. Under a heartbeat-timed execution mechanism, AERIS maintains a stable perception-decision-control loop between a low-frequency planner and a high-frequency controller, supporting real-time closed-loop operation.
What carries the argument
The attention-subgoal alignment mechanism, which annotates the active instruction step in messages to decompose long-horizon tasks, paired with role-driven orchestration that allows runtime instantiation and rebinding of small models and modules across executors.
If this is right
- The framework supports stable real-time closed-loop operation on UAVs through the separated planner and controller frequencies.
- Long-horizon tasks are handled by progressive subgoal alignment without requiring full replanning at every step.
- Roles can be rebound across executors to adapt to resource shifts while preserving the heartbeat schedule.
- The approach is validated through both simulated vision-and-language navigation tasks and two real-world UAV experiments on planning and fast response.
Where Pith is reading between the lines
- Similar role orchestration could be tested on other platforms with tight timing and compute limits, such as ground robots.
- The heartbeat mechanism might support coordination if multiple UAVs share model instances across a fleet.
- Extending the alignment annotation to include visual feedback could improve handling of unexpected environmental changes.
Load-bearing premise
Dedicated small language models combined with lightweight perception and control modules can be dynamically rebound across executors while reliably supporting real-time closed-loop operation on UAVs under strict heartbeat constraints.
What would settle it
A run on the UAV benchmark or real platform in which the control loop loses stability or instruction decomposition stops progressing when roles are rebound during heartbeat-timed execution.
Figures

read the original abstract
Integrating large language models into robotic systems holds promise for enhancing autonomy, yet practical deployment remains constrained by strict heartbeat-constrained scheduling and limited computational power. We propose AERIS: an edge deployment framework for aerial platforms. It organizes dedicated small language models combined with lightweight perception and control modules into roles that can be instantiated at runtime, and dynamically rebinds them across different executors as resources change, thereby pushing intelligent capabilities to the edge. AERIS achieves long-horizon instruction decomposition through an attention-subgoal alignment mechanism, which involves annotating the currently active instruction step in messages, thereby progressively approaching long-term objectives. We evaluate AERIS on a high-fidelity UAV Vision-and-Language Navigation benchmark. Under a heartbeat-timed execution mechanism, AERIS maintains a stable perception-decision-control loop between a low-frequency planner and a high-frequency controller, supporting real-time closed-loop operation. We further validate its deployability through two real-world experiments focused on planning and fast response. A demonstration video is provided in the supplementary materials.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes AERIS, an edge deployment framework for aerial platforms that organizes dedicated small language models with lightweight perception and control modules into runtime-instantiable roles. These roles can be dynamically rebound across executors as resources change. AERIS uses an attention-subgoal alignment mechanism (annotating the active instruction step in messages) for long-horizon instruction decomposition. It maintains a stable perception-decision-control loop via a low-frequency planner and high-frequency controller under heartbeat-timed execution, supporting real-time closed-loop UAV operation. The framework is evaluated on a high-fidelity UAV Vision-and-Language Navigation benchmark and validated via two real-world experiments on planning and fast response.
Significance. If substantiated, AERIS would address key practical barriers to LLM integration in aerial robotics by demonstrating role-based orchestration and dynamic rebinding on edge hardware while preserving real-time stability under heartbeat constraints. The dual-frequency loop and subgoal annotation approach could offer a template for scalable edge autonomy, particularly if the benchmark and real-world results show reliable long-horizon performance without violating timing bounds.
major comments (2)
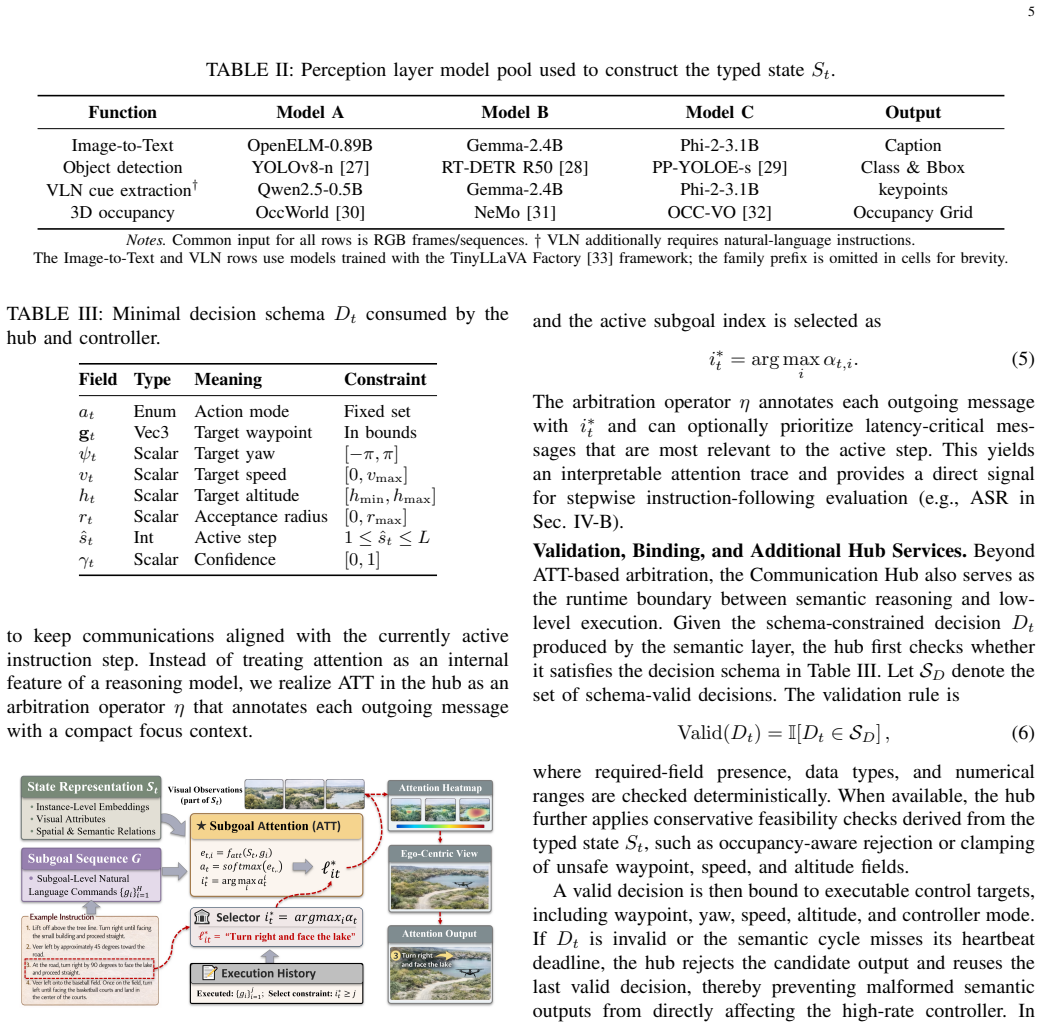
- [Evaluation section] Evaluation section: The manuscript states that AERIS was evaluated on a UAV Vision-and-Language Navigation benchmark and two real-world experiments while maintaining stable loops, yet provides no quantitative results, baselines, error metrics, timing measurements, or data details. This absence is load-bearing for the central claims of real-time closed-loop operation and deployability under heartbeat constraints.
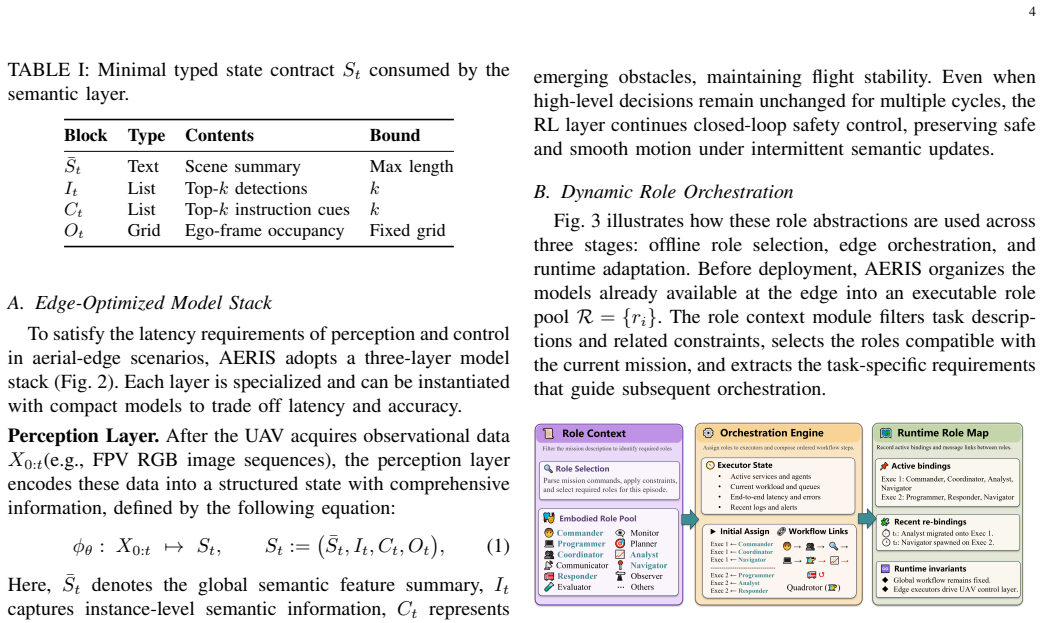
- [§3] §3 (mechanism description): The attention-subgoal alignment is described as annotating the currently active instruction step to progressively approach long-term objectives, but no formal definition, pseudocode, or analysis of how this interacts with the dual-frequency loop or prevents drift under resource rebinding is supplied, leaving the long-horizon decomposition claim without a verifiable mechanism.
minor comments (2)
- [Abstract] The abstract and introduction would benefit from explicit mention of the small LM sizes, heartbeat periods, and hardware platforms used, to allow readers to immediately gauge feasibility.
- Figure captions for any architecture or timing diagrams should include labels for the low-frequency planner, high-frequency controller, and rebinding points.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback highlighting the need for quantitative substantiation and formal mechanism details. We address each major comment below and will revise the manuscript accordingly to strengthen the claims.
read point-by-point responses
-
Referee: [Evaluation section] Evaluation section: The manuscript states that AERIS was evaluated on a UAV Vision-and-Language Navigation benchmark and two real-world experiments while maintaining stable loops, yet provides no quantitative results, baselines, error metrics, timing measurements, or data details. This absence is load-bearing for the central claims of real-time closed-loop operation and deployability under heartbeat constraints.
Authors: We agree this is a critical gap. The current version relies on high-level statements without supporting numbers. In revision we will expand the Evaluation section with: (1) benchmark success rate, SPL, and navigation error metrics on the UAV VLN dataset; (2) timing histograms for planner/controller loops under heartbeat constraints; (3) comparisons to baselines (direct LLM, non-role-based orchestration); (4) real-world latency and stability statistics from the two experiments, including resource-rebinding trials. Tables and figures will be added to make the real-time claims verifiable. revision: yes
-
Referee: [§3] §3 (mechanism description): The attention-subgoal alignment is described as annotating the currently active instruction step to progressively approach long-term objectives, but no formal definition, pseudocode, or analysis of how this interacts with the dual-frequency loop or prevents drift under resource rebinding is supplied, leaving the long-horizon decomposition claim without a verifiable mechanism.
Authors: We accept that the mechanism description is informal. We will add a formal definition of attention-subgoal alignment (including the annotation operator and message-update rule), Algorithm 1 pseudocode showing its integration with the low-frequency planner and high-frequency controller, and a short analysis subsection addressing interaction with heartbeat timing and rebinding. The analysis will include a drift bound argument and empirical measurements showing subgoal consistency across executor migrations. revision: yes
Circularity Check
No significant circularity detected
full rationale
The manuscript presents AERIS as an architectural framework for role-instantiated small LMs, dynamic rebinding, attention-subgoal annotation for instruction decomposition, and a dual-frequency planner/controller loop under heartbeat timing. No equations, derivations, fitted parameters, or mathematical claims appear in the provided text. Claims rest on system description plus benchmark and real-world validation statements rather than any reduction of outputs to inputs by construction. No self-citation chains or ansatzes are invoked as load-bearing premises. The work is therefore self-contained against external benchmarks with no detectable circular steps.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Embodied large language models enable robots to complete complex tasks in unpredictable environments,
R. Mon-Williams, G. Li, R. Long, W. Du, and C. G. Lucas, “Embodied large language models enable robots to complete complex tasks in unpredictable environments,”Nature Machine Intelligence, vol. 7, pp. 592–601, 2025
2025
-
[2]
TALKER: A task-activated language model based knowledge-extension reasoning system,
J. Lou, R. Shi, Y . Lin, Q. Wang, and W. Wu, “TALKER: A task-activated language model based knowledge-extension reasoning system,”IEEE Robotics and Automation Letters, vol. 10, no. 2, pp. 1026–1033, 2025
2025
-
[3]
Latency-aware benchmarking of large language models for natural-language robot navigation in ROS 2,
M. Das, Z. Hussain, and M. Nawaz, “Latency-aware benchmarking of large language models for natural-language robot navigation in ROS 2,” Sensors, vol. 26, no. 2, p. 608, 2026
2026
-
[4]
Do as i can, not as i say: Grounding language in robotic affordances,
M. Ahn, A. Brohan, N. Brown, Y . Chebotar, O. Cortes, B. David, C. Finn, C. Fu, K. Gopalakrishnan, K. Hausman,et al., “Do as i can, not as i say: Grounding language in robotic affordances,” inProceedings of the 6th Conference on Robot Learning, ser. Proceedings of Machine Learning Research, vol. 205. PMLR, 2022
2022
-
[5]
Code as policies: Language model programs for embodied control,
J. Liang, W. Huang, F. Xia, P. Xu, K. Hausman, B. Ichter, P. Florence, and A. Zeng, “Code as policies: Language model programs for embodied control,” inProceedings of the IEEE International Conference on Robotics and Automation, 2023, pp. 9493–9500
2023
-
[6]
RT-2: Vision-language-action models transfer web knowledge to robotic control,
B. Zitkovich, T. Yu, S. Xu, P. Xu, T. Xiao, F. Xia, J. Wu, P. Wohlhart, S. Welker, A. Wahid,et al., “RT-2: Vision-language-action models transfer web knowledge to robotic control,” inProceedings of the Conference on Robot Learning, ser. Proceedings of Machine Learning Research, vol. 229. PMLR, 2023, pp. 2165–2183. 10
2023
-
[7]
Octo: An open-source generalist robot policy,
Octo Model Team, D. Ghosh, H. Walke, K. Pertsch,et al., “Octo: An open-source generalist robot policy,” inProceedings of Robotics: Science and Systems, 2024
2024
-
[8]
DROID: A large-scale in-the-wild robot manipulation dataset,
A. Khazatsky, K. Pertsch, S. Nair, A. Balakrishna,et al., “DROID: A large-scale in-the-wild robot manipulation dataset,” inProceedings of Robotics: Science and Systems, 2024
2024
-
[9]
DeeR-VLA: Dynamic inference of multimodal large language models for efficient robot execution,
Y . Yue, Y . Wang, B. Kang, Y . Han, S. Wang, S. Song, J. Feng, and G. Huang, “DeeR-VLA: Dynamic inference of multimodal large language models for efficient robot execution,” inAdvances in Neural Information Processing Systems, 2024. [Online]. Available: https://openreview.net/forum?id=PBmIq4Z9tq
2024
-
[10]
Aeri- alVLN: Vision-and-language navigation for UA Vs,
S. Liu, H. Zhang, Y . Qi, P. Wang, Y . Zhang, and Q. Wu, “Aeri- alVLN: Vision-and-language navigation for UA Vs,” inProceedings of the IEEE/CVF International Conference on Computer Vision, 2023, pp. 15 384–15 394
2023
-
[11]
CityNavAgent: Aerial vision-and-language navigation with hierarchical semantic planning and global memory,
W. Zhang, C. Gao, S. Yu, R. Peng, B. Zhao, Q. Zhang, J. Cui, X. Chen, and Y . Li, “CityNavAgent: Aerial vision-and-language navigation with hierarchical semantic planning and global memory,” inProceedings of the 63rd Annual Meeting of the Association for Computational Linguistics, 2025, pp. 31 292–31 309
2025
-
[12]
arXiv preprint arXiv:2410.07087 (2024)
X. Wang, D. Yang, Z. Wang, H. Kwan, J. Chen, W. Wu, H. Li, Y . Liao, and S. Liu, “Towards realistic UA V vision- language navigation: Platform, benchmark, and methodology,”CoRR, vol. abs/2410.07087, 2024, arXiv:2410.07087. [Online]. Available: https://arxiv.org/abs/2410.07087
-
[13]
CLIP-VG: Self-paced curriculum adapting of CLIP for visual grounding,
L. Xiao, X. Yang, F. Peng, M. Yan, Y . Wang, and C. Xu, “CLIP-VG: Self-paced curriculum adapting of CLIP for visual grounding,”IEEE Transactions on Multimedia, vol. 26, pp. 4334–4347, 2024
2024
-
[14]
SpQR: A sparse-quantized representation for near-lossless LLM weight compression,
T. Dettmers, R. A. Svirschevski, V . Egiazarian, D. Kuznedelev, E. Frantar, S. Ashkboos, A. Borzunov, T. Hoefler, and D.-A. Alistarh, “SpQR: A sparse-quantized representation for near-lossless LLM weight compression,” inProceedings of the International Conference on Learning Representations, 2024. [Online]. Available: https://openreview.net/forum?id=Q1u25ahSuy
2024
-
[15]
SpinQuant: LLM quantization with learned rotations,
Z. Liu, C. Zhao, I. Fedorov, B. Soran, D. Choudhary, R. Krishnamoorthi, V . Chandra, Y . Tian, and T. Blankevoort, “SpinQuant: LLM quantization with learned rotations,” inProceedings of the International Conference on Learning Representations, 2025. [Online]. Available: https://openreview.net/forum?id=ogO6DGE6FZ
2025
-
[16]
KIVI: A tuning-free asymmetric 2bit quantization for KV cache,
Z. Liu, J. Yuan, H. Jin, S. Zhong, Z. Xu, V . Braverman, B. Chen, and X. Hu, “KIVI: A tuning-free asymmetric 2bit quantization for KV cache,” inProceedings of the 41st International Conference on Machine Learning, 2024
2024
-
[17]
FlashAttention-3: Fast and Accurate Attention with Asynchrony and Low-precision
J. Shah, T. Dao,et al., “FlashAttention-3: Fast and accurate attention with asynchrony and low precision,” inAdvances in Neural Information Processing Systems, 2024. [Online]. Available: https://arxiv.org/abs/2407.08608
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[18]
Medusa: Simple LLM inference acceleration framework with multiple decoding heads,
T. Cai, Y . Li, Z. Geng, H. Peng, J. D. Lee, D. Chen, and T. Dao, “Medusa: Simple LLM inference acceleration framework with multiple decoding heads,” inProceedings of the 41st International Conference on Machine Learning, 2024
2024
-
[19]
CAMEL: Communicative agents for “mind
G. Li, H. A. A. K. Hammoud, H. Itani, D. Khizbullin, and B. Ghanem, “CAMEL: Communicative agents for “mind” exploration of large lan- guage model society,” inAdvances in Neural Information Processing Systems, vol. 36, 2023, pp. 51 991–52 008
2023
-
[20]
AutoAgents: A framework for automatic agent generation,
G. Chen, S. Dong, Y . Shu, G. Zhang, J. Sesay, B. F. Karlsson, J. Fu, and Y . Shi, “AutoAgents: A framework for automatic agent generation,” inProceedings of the Thirty-Third International Joint Conference on Artificial Intelligence, 2024, pp. 21–28
2024
-
[21]
ProAgent: Building proactive cooperative agents with large language models,
C. Zhanget al., “ProAgent: Building proactive cooperative agents with large language models,” inProceedings of the AAAI Conference on Artificial Intelligence, vol. 38, no. 16, 2024, pp. 17 591–17 599
2024
-
[22]
Scaling large-language-model-based multi-agent collaboration,
C. Qianet al., “Scaling large-language-model-based multi-agent collaboration,” inProceedings of the International Conference on Learning Representations, 2025. [Online]. Available: https://openreview. net/forum?id=K3n5jPkrU6
2025
-
[23]
COLLAB-LLM: A communication-centric role- based framework for scalable multi-agent LLM collaboration,
E. Albaroudiet al., “COLLAB-LLM: A communication-centric role- based framework for scalable multi-agent LLM collaboration,”Asian Journal of Research in Computer Science, vol. 19, no. 1, pp. 152–185, 2026
2026
-
[24]
Roco: Dialectic multi- robot collaboration with large language models
Z. Mandi, S. Jain, and S. Song, “RoCo: Dialectic multi-robot collaboration with large language models,”CoRR, vol. abs/2307.04738, 2023, arXiv:2307.04738. [Online]. Available: https://arxiv.org/abs/2307. 04738
-
[25]
Scalable multi-robot collaboration with large language models: Centralized or decentralized systems?
Y . Chenet al., “Scalable multi-robot collaboration with large language models: Centralized or decentralized systems?” inProceedings of the IEEE International Conference on Robotics and Automation, 2024
2024
-
[26]
Agents trainer: Automatically training multi-agent reinforcement learn- ing models for drone swarm using language model-based agents,
J. Lou, R. Shi, H. Wang, M.-M. Yu, Y . Wang, Q. Wang, and W. Wu, “Agents trainer: Automatically training multi-agent reinforcement learn- ing models for drone swarm using language model-based agents,” IEEE Transactions on Automation Science and Engineering, 2026, early access/forthcoming; verify final volume, issue, and pages before final proof
2026
-
[27]
Ultralytics YOLOv8 documentation,
Ultralytics, “Ultralytics YOLOv8 documentation,” https: //docs.ultralytics.com/models/yolov8/, 2023, accessed: 2026-05-12
2023
-
[28]
DETRs beat YOLOs on real-time object detection,
Y . Zhao, W. Lv, S. Xu, J. Wei, G. Wang, Q. Dang, Y . Liu, and J. Chen, “DETRs beat YOLOs on real-time object detection,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2024, pp. 16 965–16 974
2024
-
[29]
PP-YOLOE: An evolved version of YOLO,
S. Xu, X. Wang, W. Lv, Q. Chang, C. Cui, K. Deng, G. Wang, Q. Dang, S. Wei, Y . Du, and B. Lai, “PP-YOLOE: An evolved version of YOLO,”CoRR, vol. abs/2203.16250, 2022, arXiv:2203.16250. [Online]. Available: https://arxiv.org/abs/2203.16250
-
[30]
Occ- World: Learning a 3D occupancy world model for autonomous driving,
W. Zheng, W. Chen, Y . Huang, B. Zhang, Y . Duan, and J. Lu, “Occ- World: Learning a 3D occupancy world model for autonomous driving,” inProceedings of the European Conference on Computer Vision, 2024, pp. 55–72
2024
-
[31]
Neural volumetric world models for autonomous driving,
Z. Huang, J. Zhang, and E. Ohn-Bar, “Neural volumetric world models for autonomous driving,” inProceedings of the European Conference on Computer Vision, 2024, pp. 195–213
2024
-
[32]
OCC-VO: Dense mapping via 3D occupancy-based visual odometry for autonomous driving,
H. Li, Y . Duan, X. Zhang, H. Liu, J. Ji, and Y . Zhang, “OCC-VO: Dense mapping via 3D occupancy-based visual odometry for autonomous driving,” inProceedings of the IEEE International Conference on Robotics and Automation, 2024, pp. 17 961–17 967
2024
-
[34]
Available: https://arxiv.org/abs/2405.11788
[Online]. Available: https://arxiv.org/abs/2405.11788
-
[35]
LoRA: Low-rank adaptation of large language models,
E. J. Hu, Y . Shen, P. Wallis, Z. Allen-Zhu, Y . Li, S. Wang, L. Wang, and W. Chen, “LoRA: Low-rank adaptation of large language models,” inProceedings of the International Conference on Learning Representations, 2022. [Online]. Available: https: //openreview.net/forum?id=nZeVKeeFYf9
2022
-
[36]
QLoRA: Efficient finetuning of quantized LLMs,
T. Dettmers, A. Pagnoni, A. Holtzman, and L. Zettlemoyer, “QLoRA: Efficient finetuning of quantized LLMs,” inAdvances in Neural Infor- mation Processing Systems, vol. 36, 2023, pp. 10 088–10 115
2023
-
[37]
Vision-and-language navigation: Interpreting visually-grounded navigation instructions in real environments,
P. Anderson, Q. Wu, D. Teney, J. Bruce, M. Johnson, N. S ¨underhauf, I. Reid, S. Gould, and A. van den Hengel, “Vision-and-language navigation: Interpreting visually-grounded navigation instructions in real environments,” inProceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2018, pp. 3674–3683
2018
-
[38]
Beyond the nav-graph: Vision-and-language navigation in continuous environments,
J. Krantz, E. Wijmans, A. Majumdar, D. Batra, and S. Lee, “Beyond the nav-graph: Vision-and-language navigation in continuous environments,”CoRR, vol. abs/2004.02857, 2020, arXiv:2004.02857. [Online]. Available: https://arxiv.org/abs/2004.02857
-
[39]
General evaluation for instruction conditioned navigation using dynamic time warping,
G. I. Magalhaes, V . Jain, A. Ku, E. Ie, and J. Baldridge, “General evaluation for instruction conditioned navigation using dynamic time warping,” inNeurIPS Workshop on Visually Grounded Interaction and Language, 2019. [Online]. Available: https://arxiv.org/abs/1907.05446
-
[40]
On Evaluation of Embodied Navigation Agents
P. Anderson, A. X. Chang, D. S. Chaplot, A. Dosovitskiy, S. Gupta, V . Koltun, J. Kosecka, J. Malik, R. Mottaghi, M. Savva, and A. R. Zamir, “On evaluation of embodied navigation agents,”CoRR, vol. abs/1807.06757, 2018, arXiv:1807.06757. [Online]. Available: https://arxiv.org/abs/1807.06757
work page internal anchor Pith review Pith/arXiv arXiv 2018
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.