Unveiling Transferability in Trajectory Prediction via Latent Scene Embeddings
Pith reviewed 2026-07-01 06:23 UTC · model grok-4.3
The pith
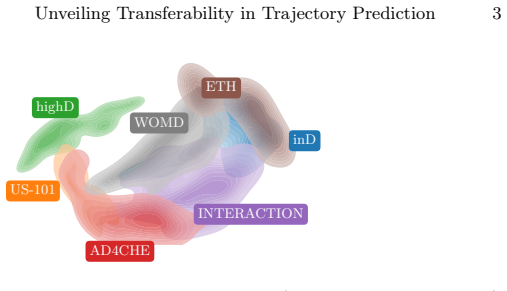
Latent embeddings of entire trajectory datasets produce similarity scores that correlate with how well models transfer across different scenes.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
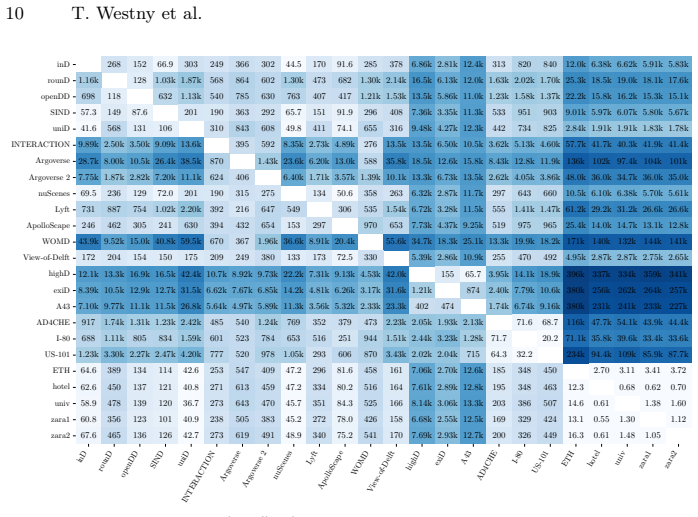
A framework that learns latent representations of datasets and quantifies their similarity using distributional metrics produces transferability scores that strongly correlate with cross-dataset model performance in trajectory prediction.
What carries the argument
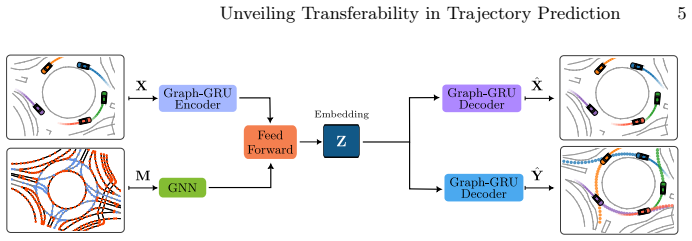
A framework that learns latent representations of entire datasets and quantifies similarity using distributional metrics.
If this is right
- Transferability scores can guide which datasets to combine for training without running full cross-experiments.
- Pretraining data can be selected by ranking datasets according to their embedding similarity to the target domain.
- Large-scale foundation models for motion prediction can use the scores to prioritize compatible source data.
- Predictive systems become more robust by avoiding training on datasets whose embeddings indicate large domain gaps.
Where Pith is reading between the lines
- The same embedding approach could be applied to select data for other sequence prediction tasks such as video forecasting.
- If embeddings also reflect sensor-specific artifacts, the scores might help diagnose failures caused by hardware differences rather than scene content.
- Dataset curators could use the method to flag redundant collections that add little new information beyond existing benchmarks.
Load-bearing premise
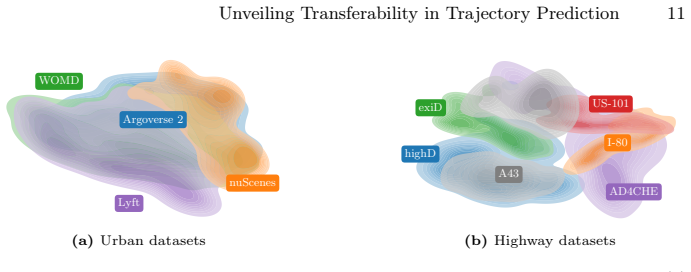
Latent embeddings of entire datasets capture the key differences in scene layouts, agent behaviors, and sensing conditions that drive transferability failures.
What would settle it
Running the embedding procedure on a fresh collection of datasets and models and finding that the resulting similarity scores show no correlation with measured cross-dataset performance would falsify the central claim.
Figures
read the original abstract
The growing availability of trajectory datasets has fueled major advances in data-driven motion prediction. Yet, models trained on one dataset often fail to generalize beyond their training domain as a result of differences in scene layouts, agent behaviors, and sensing conditions. A framework that learns latent representations of datasets and quantifies their similarity using distributional metrics is presented. This large-scale study covers 24 major datasets, including the most widely used motion-prediction benchmarks, and shows that the resulting transferability scores strongly correlate with cross-dataset model performance. The results provide practical guidance for dataset selection, pretraining, and large-scale foundation models for motion prediction, paving the way toward more generalizable and robust predictive systems.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents a framework that learns latent representations of entire trajectory datasets and quantifies pairwise similarity via distributional metrics on these embeddings. A large-scale empirical study across 24 motion-prediction datasets reports that the resulting transferability scores exhibit strong correlation with observed cross-dataset model performance, and the authors argue this supplies practical guidance for dataset selection, pretraining, and foundation-model development.
Significance. If the correlation is robust and the embeddings demonstrably encode the scene-layout, behavioral, and sensing factors that drive transfer failures (rather than superficial statistics), the result would be useful for data curation in trajectory prediction. The scale of the study (24 datasets) is a positive feature. The provided text supplies no methods, equations, ablation studies, or qualitative inspections that would allow verification of these conditions.
major comments (2)
- The central claim—that distributional metrics on dataset-level latent embeddings produce transferability scores whose correlation with cross-dataset performance is driven by differences in scene layout, agent behavior, and sensing conditions—rests on an untested assumption. No section supplies a probing experiment, controlled ablation, or qualitative inspection showing that the learned embeddings isolate these factors rather than trajectory-length distributions, point-cloud density, or other superficial statistics.
- The abstract states that the scores 'strongly correlate' with cross-dataset performance, yet the manuscript provides neither the correlation coefficient, the number of model–dataset pairs evaluated, nor any statistical controls for confounding variables such as dataset size or annotation quality. Without these details the claim cannot be evaluated.
Simulated Author's Rebuttal
We thank the referee for the review and the opportunity to clarify our work. We address the two major comments point by point below.
read point-by-point responses
-
Referee: The central claim—that distributional metrics on dataset-level latent embeddings produce transferability scores whose correlation with cross-dataset performance is driven by differences in scene layout, agent behavior, and sensing conditions—rests on an untested assumption. No section supplies a probing experiment, controlled ablation, or qualitative inspection showing that the learned embeddings isolate these factors rather than trajectory-length distributions, point-cloud density, or other superficial statistics.
Authors: The framework is trained directly on raw trajectory data from the 24 datasets, and the resulting embeddings are evaluated solely through their ability to predict observed transfer gaps; the strong empirical correlation therefore provides indirect support that the embeddings reflect the factors driving those gaps. We nevertheless agree that direct evidence would be stronger and will add controlled ablations (e.g., length-matched subsets, density-normalized inputs) together with qualitative embedding visualizations in the revised manuscript. revision: yes
-
Referee: The abstract states that the scores 'strongly correlate' with cross-dataset performance, yet the manuscript provides neither the correlation coefficient, the number of model–dataset pairs evaluated, nor any statistical controls for confounding variables such as dataset size or annotation quality. Without these details the claim cannot be evaluated.
Authors: We will revise both the abstract and the results section to report the precise Pearson/Spearman coefficient, the exact count of model–dataset transfer pairs used in the correlation analysis, and additional regression controls that account for dataset size and annotation quality. revision: yes
Circularity Check
No circularity: empirical correlation between learned embeddings and transfer performance stands as independent observation
full rationale
The paper introduces a framework that learns latent dataset embeddings and applies distributional metrics to produce transferability scores, then reports an empirical correlation of those scores with observed cross-dataset model performance across 24 datasets. No equations, fitting procedures, or self-citations are described that would make the transferability scores or the correlation tautological by construction. The central result is an observed statistical relationship rather than a derived identity, and the abstract supplies no load-bearing self-referential step that reduces the claimed prediction to its own inputs.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
In: IEEE/CVF Int
Achille, A., Lam, M., Tewari, R., Ravichandran, A., Maji, S., Fowlkes, C.C., Soatto, S., Perona, P.: Task2Vec: Task embedding for meta-learning. In: IEEE/CVF Int. Conf. Comput. Vision. pp. 6430–6439 (2019)
2019
-
[2]
In: IEEE Conf
Alahi, A., Goel, K., Ramanathan, V., Robicquet, A., Fei-Fei, L., Savarese, S.: Social LSTM: Human trajectory prediction in crowded spaces. In: IEEE Conf. Comput. Vision Pattern Recog. pp. 961–971 (2016)
2016
-
[3]
Amirian, J., Hayet, J.B., Pettré, J.: Social ways: Learning multi-modal distributions ofpedestriantrajectorieswithGANs.In:IEEE/CVFConf.Comput.VisionPattern Recog. (2019)
2019
-
[4]
In: Asian Conf
Amirian, J., Zhang, B., Castro, F.V., Baldelomar, J.J., Hayet, J.B., Pettré, J.: OpenTraj: Assessing prediction complexity in human trajectories datasets. In: Asian Conf. Comput. Vision (2020)
2020
-
[5]
Ba, J.L., Kiros, J.R., Hinton, G.E.: Layer normalization. arXiv preprint arXiv:1607.06450 (2016)
work page internal anchor Pith review Pith/arXiv arXiv 2016
-
[6]
In: IEEE/CVF Conference on Computer Vision and Pattern Recognition (2024)
Bae, I., Park, Y.J., Jeon, H.G.: SingularTrajectory: Universal trajectory predictor using diffusion model. In: IEEE/CVF Conference on Computer Vision and Pattern Recognition (2024)
2024
-
[7]
Communic
Berghaus, M., Lamberty, S., Ehlers, J., Kalló, E., Oeser, M.: Vehicle trajectory dataset from drone videos including off-ramp and congested traffic–analysis of data quality, traffic flow, and accident risk. Communic. in Transport. Research4, 100133 (2024)
2024
-
[8]
Springer (2024)
Bishop, C.M., Bishop, H.: Deep learning. Springer (2024)
2024
-
[9]
In: IEEE Intell
Bock, J., Krajewski, R., Moers, T., Runde, S., Vater, L., Eckstein, L.: The inD dataset: A drone dataset of naturalistic road user trajectories at German intersections. In: IEEE Intell. Veh. Symp. pp. 1929–1934 (2020)
1929
-
[10]
IEEE Robot
Boekema, H.J.H., Martens, B.K., Kooij, J.F., Gavrila, D.M.: Multi-class trajectory prediction in urban traffic using the view-of-delft prediction dataset. IEEE Robot. Automat. Lett.9(5), 4806–4813 (2024)
2024
-
[11]
On the Opportunities and Risks of Foundation Models
Bommasani, R., Hudson, D.A., Adeli, E., Altman, R., Arora, S., von Arx, S., Bernstein, M.S., Bohg, J., Bosselut, A., Brunskill, E., et al.: On the opportunities and risks of foundation models. arXiv preprint arXiv:2108.07258 (2021)
work page internal anchor Pith review Pith/arXiv arXiv 2021
-
[12]
In: IEEE Intell
Breuer, A., Termöhlen, J.A., Homoceanu, S., Fingscheidt, T.: openDD: A large- scale roundabout drone dataset. In: IEEE Intell. Transport. Syst. Conf. pp. 1–6. IEEE (2020)
2020
-
[13]
In: IEEE/CVF Conf
Caesar, H., Bankiti, V., Lang, A.H., Vora, S., Liong, V.E., Xu, Q., Krishnan, A., Pan, Y., Baldan, G., Beijbom, O.: nuScenes: A multimodal dataset for autonomous driving. In: IEEE/CVF Conf. Comput. Vision Pattern Recog. pp. 11621–11631 (2020)
2020
-
[14]
In: IEEE/CVF Conf
Chang, M.F., Lambert, J., Sangkloy, P., Singh, J., Bak, S., Hartnett, A., Wang, D., Carr, P., Lucey, S., Ramanan, D., et al.: Argoverse: 3D tracking and forecasting with rich maps. In: IEEE/CVF Conf. Comput. Vision Pattern Recog. pp. 8748– 8757 (2019)
2019
-
[15]
In: SSST-8, Eighth Workshop on Syntax, Semantics and Structure in Statistical Translation
Cho, K., van Merriënboer, B., Bahdanau, D., Bengio, Y.: On the properties of neural machine translation: Encoder–decoder approaches. In: SSST-8, Eighth Workshop on Syntax, Semantics and Structure in Statistical Translation. pp. 103–111 (2014)
2014
-
[16]
In: IEEE Intell
Choi, Y., Mercurius, R.C., Shabestary, S.M.A., Rasouli, A.: DICE: Diverse diffusion model with scoring for trajectory prediction. In: IEEE Intell. Veh. Symp. pp. 3023– 3029 (2024) Unveiling Transferability in Trajectory Prediction 17
2024
-
[17]
Clark, R.: Predicting Transfer Learning Performance Using Dataset Similarity for Time Series Classification of Human Activity Recognition. Ph.D. thesis, McMaster University (2022)
2022
-
[18]
In: IEEE Int
Cui, H., Radosavljevic, V., Chou, F.C., Lin, T.H., Nguyen, T., Huang, T.K., Schneider, J., Djuric, N.: Multimodal trajectory predictions for autonomous driving using deep convolutional networks. In: IEEE Int. Conf. Robot. Automat. pp. 2090– 2096 (2019)
2090
-
[19]
In: IEEE Conf
Deo, N., Trivedi, M.M.: Convolutional social pooling for vehicle trajectory predic- tion. In: IEEE Conf. Comput. Vision Pattern Recog. pp. 1468–1476 (2018)
2018
-
[20]
In: Conf
Deo, N., Wolff, E., Beijbom, O.: Multimodal trajectory prediction conditioned on lane-graph traversals. In: Conf. on Robot Learn. pp. 203–212. PMLR (2022)
2022
-
[21]
In: IEEE Intell
Diehl, F., Brunner, T., Le, M.T., Knoll, A.: Graph neural networks for modelling traffic participant interaction. In: IEEE Intell. Veh. Symp. pp. 695–701 (2019)
2019
-
[22]
arXiv preprint arXiv:2404.06198 (2024)
Ehrig, C., Sonnleitner, B., Neumann, U., Cleophas, C., Forestier, G.: The impact of data set similarity and diversity on transfer learning success in time series forecasting. arXiv preprint arXiv:2404.06198 (2024)
-
[23]
In: IEEE/CVF Int
Ettinger, S., Cheng, S., Caine, B., Liu, C., Zhao, H., Pradhan, S., Chai, Y., Sapp, B., Qi, C.R., Zhou, Y., et al.: Large scale interactive motion forecasting for autonomous driving: The Waymo open motion dataset. In: IEEE/CVF Int. Conf. Comput. Vision. pp. 9710–9719 (2021)
2021
-
[24]
IEEE Transactions on Intelligent Transportation Systems25(8), 8334–8355 (2024)
Fang, J., Wang, F., Xue, J., Chua, T.S.: Behavioral intention prediction in driving scenes: A survey. IEEE Transactions on Intelligent Transportation Systems25(8), 8334–8355 (2024)
2024
-
[25]
In: IEEE/CVF Conf
Feng, K., Li, C., Ren, D., Yuan, Y., Wang, G.: On the road to portability: Compressing end-to-end motion planner for autonomous driving. In: IEEE/CVF Conf. Comput. Vision Pattern Recog. pp. 15099–15108 (2024)
2024
-
[26]
Feng, L., Bahari, M., Amor, K.M.B., Zablocki, É., Cord, M., Alahi, A.: UniTraj: A unified framework for scalable vehicle trajectory prediction. In: Eur. Conf. Comput. Vision. pp. 106–123. Springer (2024)
2024
-
[27]
In: IEEE Int
Feng, L., Li, Q., Peng, Z., Tan, S., Zhou, B.: TrafficGen: Learning to generate diverse and realistic traffic scenarios. In: IEEE Int. Conf. Robot. Automat. pp. 3567–3575. IEEE (2023)
2023
- [28]
-
[29]
In: ICLR Workshop on Representation Learn
Fey, M., Lenssen, J.E.: Fast graph representation learning with PyTorch Geometric. In: ICLR Workshop on Representation Learn. on Graphs and Manifolds (2019)
2019
-
[30]
arXiv preprint arXiv:2402.01105 (2024)
Gao, H., Wang, Z., Li, Y., Long, K., Yang, M., Shen, Y.: A survey for foundation models in autonomous driving. arXiv preprint arXiv:2402.01105 (2024)
-
[31]
IEEE Robot
Gao, X., Jia, X., Li, Y., Xiong, H.: Dynamic scenario representation learning for motion forecasting with heterogeneous graph convolutional recurrent networks. IEEE Robot. Automat. Lett.8(5), 2946–2953 (2023)
2023
-
[32]
IEEE Trans
Geng, M., Li, J., Li, C., Xie, N., Chen, X., Lee, D.H.: Adaptive and simultane- ous trajectory prediction for heterogeneous agents via transferable hierarchical transformer network. IEEE Trans. Intell. Transport. Syst.24(10), 11479–11492 (2023)
2023
-
[33]
In: IEEE Int
Gilles, T., Sabatini, S., Tsishkou, D., Stanciulescu, B., Moutarde, F.: GOHOME: Graph-oriented heatmap output for future motion estimation. In: IEEE Int. Conf. Robot. Automat. pp. 9107–9114. IEEE (2022)
2022
-
[34]
In: Workshop on 18 T
Gilles, T., Sabatini, S., Tsishkou, D., Stanciulescu, B., Moutarde, F.: Uncertainty estimation for cross-dataset performance in trajectory prediction. In: Workshop on 18 T. Westny et al. Fresh Perspectives on the Future of Autonomous Driving, IEEE Int. Conf. Robot. Automat. (2022)
2022
-
[35]
In: 25th international conference on pattern recognition (ICPR)
Giuliari, F., Hasan, I., Cristani, M., Galasso, F.: Transformer networks for trajec- tory forecasting. In: 25th international conference on pattern recognition (ICPR). pp. 10335–10342. IEEE (2021)
2021
-
[36]
An Empirical Investigation of Catastrophic Forgetting in Gradient-Based Neural Networks
Goodfellow, I.J., Mirza, M., Xiao, D., Courville, A., Bengio, Y.: An empirical investigation of catastrophic forgetting in gradient-based neural networks. arXiv preprint arXiv:1312.6211 (2013)
work page internal anchor Pith review Pith/arXiv arXiv 2013
-
[37]
Inter- national journal of computer vision129(6), 1789–1819 (2021)
Gou, J., Yu, B., Maybank, S.J., Tao, D.: Knowledge distillation: A survey. Inter- national journal of computer vision129(6), 1789–1819 (2021)
2021
-
[38]
The Journal of Machine Learning Research13(1), 723–773 (2012)
Gretton, A., Borgwardt, K.M., Rasch, M.J., Schölkopf, B., Smola, A.: A kernel two-sample test. The Journal of Machine Learning Research13(1), 723–773 (2012)
2012
-
[39]
In: IEEE/CVF Conf
Gu, T., Chen, G., Li, J., Lin, C., Rao, Y., Zhou, J., Lu, J.: Stochastic trajectory prediction via motion indeterminacy diffusion. In: IEEE/CVF Conf. Comput. Vision Pattern Recog. pp. 17113–17122. IEEE/CVF (2022)
2022
-
[40]
In: IEEE Conf
Gupta, A., Johnson, J., Fei-Fei, L., Savarese, S., Alahi, A.: Social GAN: Socially ac- ceptable trajectories with generative adversarial networks. In: IEEE Conf. Comput. Vision Pattern Recog. (2018)
2018
-
[41]
In: IEEE/CVF Conf
Hegde, D., Yasarla, R., Cai, H., Han, S., Bhattacharyya, A., Mahajan, S., Liu, L., Garrepalli, R., Patel, V.M., Porikli, F.: Distilling multi-modal large language models for autonomous driving. In: IEEE/CVF Conf. Comput. Vision Pattern Recog. pp. 27575–27585 (2025)
2025
-
[42]
Gaussian Error Linear Units (GELUs)
Hendrycks, D., Gimpel, K.: Gaussian error linear units (GELUs). arXiv preprint arXiv:1606.08415 (2016)
work page internal anchor Pith review Pith/arXiv arXiv 2016
-
[43]
Distilling the Knowledge in a Neural Network
Hinton, G., Vinyals, O., Dean, J.: Distilling the knowledge in a neural network. arXiv preprint arXiv:1503.02531 (2015)
work page internal anchor Pith review Pith/arXiv arXiv 2015
-
[44]
In: Conference on Robot Learning (CoRL)
Houston, J., Zuidhof, G., Bergamini, L., Ye, Y., Chen, L., Jain, A., Omari, S., Iglovikov, V., Ondruska, P.: One thousand and one hours: Self-driving motion prediction dataset. In: Conference on Robot Learning (CoRL). pp. 409–418. PMLR (2021)
2021
-
[45]
In: IEEE Intell
Hu, Y., Zhan, W., Tomizuka, M.: Probabilistic prediction of vehicle semantic intention and motion. In: IEEE Intell. Veh. Symp. pp. 307–313 (2018)
2018
-
[46]
IEEE Trans
Hu, Y., Zhan, W., Tomizuka, M.: Scenario-transferable semantic graph reasoning for interaction-aware probabilistic prediction. IEEE Trans. Intell. Transport. Syst. 23(12), 23212–23230 (2022)
2022
-
[47]
IEEE Trans
Huang, Y., Du, J., Yang, Z., Zhou, Z., Zhang, L., Chen, H.: A survey on trajectory- prediction methods for autonomous driving. IEEE Trans. Intell. Veh.7(3), 652–674 (2022)
2022
-
[48]
In: IEEE Int
Huang, Z., Mo, X., Lv, C.: Multi-modal motion prediction with transformer-based neural network for autonomous driving. In: IEEE Int. Conf. Robot. Automat. pp. 2605–2611 (2022)
2022
-
[49]
In: IEEE Int
Ivanovic, B., Harrison, J., Pavone, M.: Expanding the deployment envelope of be- havior prediction via adaptive meta-learning. In: IEEE Int. Conf. Robot. Automat. pp. 7786–7793. IEEE (2023)
2023
-
[50]
In: Thirty-seventh Conference on Neural Information Processing Systems Datasets and Benchmarks Track (2023)
Ivanovic, B., Song, G., Gilitschenski, I., Pavone, M.: trajdata: A unified interface to multiple human trajectory datasets. In: Thirty-seventh Conference on Neural Information Processing Systems Datasets and Benchmarks Track (2023)
2023
-
[51]
In: IEEE Intell
Jaipuria, N., Habibi, G., How, J.P.: Learning in the curbside coordinate frame for a transferable pedestrian trajectory prediction model. In: IEEE Intell. Transport. Syst. Conf. pp. 3125–3131 (2018) Unveiling Transferability in Trajectory Prediction 19
2018
-
[52]
In: IEEE/CVF Conf
Jiang, C., Cornman, A., Park, C., Sapp, B., Zhou, Y., Anguelov, D., et al.: MotionDiffuser: Controllable multi-agent motion prediction using diffusion. In: IEEE/CVF Conf. Comput. Vision Pattern Recog. pp. 9644–9653 (2023)
2023
-
[53]
In: IEEE Int
Kong, H., Xu, J., Gong, S., Yang, J., Zhang, S.: Adaptive pedestrian trajectory prediction via target-directed angle augmentation. In: IEEE Int. Conf. Acoust., Speech, Signal Processing. pp. 4065–4069. IEEE (2024)
2024
-
[54]
In: IEEE Intell
Krajewski, R., Bock, J., Kloeker, L., Eckstein, L.: The highD dataset: A drone dataset of naturalistic vehicle trajectories on German highways for validation of highly automated driving systems. In: IEEE Intell. Transport. Syst. Conf. pp. 2118–2125 (2018)
2018
-
[55]
In: IEEE Intell
Krajewski, R., Moers, T., Bock, J., Vater, L., Eckstein, L.: The rounD dataset: A drone dataset of road user trajectories at roundabouts in Germany. In: IEEE Intell. Transport. Syst. Conf. pp. 1–6 (2020)
2020
-
[56]
Deduplicating Training Data Makes Language Models Better
Lee, K., Ippolito, D., Nystrom, A., Zhang, C., Eck, D., Callison-Burch, C., Carlini, N.: Deduplicating training data makes language models better. arXiv preprint arXiv:2107.06499 (2021)
work page internal anchor Pith review Pith/arXiv arXiv 2021
-
[57]
In: Computer graphics forum
Lerner, A., Chrysanthou, Y., Lischinski, D.: Crowds by example. In: Computer graphics forum. vol. 26, pp. 655–664. Wiley Online Library (2007)
2007
-
[58]
com/unid-dataset/(2024), accessed: September 8, 2024
leveLXData: The uniD Dataset: A university drone dataset.https://levelxdata. com/unid-dataset/(2024), accessed: September 8, 2024
2024
-
[59]
IEEE Trans
Li, J., Ma, H., Zhang, Z., Li, J., Tomizuka, M.: Spatio-temporal graph dual- attention network for multi-agent prediction and tracking. IEEE Trans. Intell. Transport. Syst.23(8), 10556–10569 (2022)
2022
-
[60]
Advances in Neural Information Processing Systems (NeurIPS)36, 3894–3920 (2023)
Li, Q., Peng, Z.M., Feng, L., Liu, Z., Duan, C., Mo, W., Zhou, B.: ScenarioNet: Open-source platform for large-scale traffic scenario simulation and modeling. Advances in Neural Information Processing Systems (NeurIPS)36, 3894–3920 (2023)
2023
-
[61]
arXiv preprint arXiv:1907.07792 (2019)
Li, X., Ying, X., Chuah, M.C.: GRIP++: Enhanced graph-based interaction-aware trajectory prediction for autonomous driving. arXiv preprint arXiv:1907.07792 (2019)
-
[62]
Liang, M., Yang, B., Hu, R., Chen, Y., Liao, R., Feng, S., Urtasun, R.: Learning lane graph representations for motion forecasting. In: Eur. Conf. Comput. Vision. pp. 541–556 (2020)
2020
-
[63]
Liu, M., Cheng, H., Yang, M.Y.: Tracing the influence of predecessors on trajectory prediction. In: Int. Conf. on Comput. Vision Worksh. (ICCVW). pp. 3245–3255. IEEE/CVF (2023)
2023
-
[64]
In: IEEE/CVF Conf
Liu, Y., Zhang, J., Fang, L., Jiang, Q., Zhou, B.: Multimodal motion prediction with stacked transformers. In: IEEE/CVF Conf. Comput. Vision Pattern Recog. pp. 7577–7586 (2021)
2021
-
[65]
In: International Conference on Learning Representations (ICLR) (2017)
Loshchilov, I., Hutter, F.: SGDR: Stochastic gradient descent with warm restarts. In: International Conference on Learning Representations (ICLR) (2017)
2017
-
[66]
In: International Conference on Learning Representations (ICLR) (2019)
Loshchilov, I., Hutter, F.: Decoupled weight decay regularization. In: International Conference on Learning Representations (ICLR) (2019)
2019
-
[67]
In: Proceedings of the AAAI conference on artificial intelligence
Ma, Y., Zhu, X., Zhang, S., Yang, R., Wang, W., Manocha, D.: Trafficpredict: Trajectory prediction for heterogeneous traffic-agents. In: Proceedings of the AAAI conference on artificial intelligence. vol. 33, pp. 6120–6127 (2019)
2019
-
[68]
Journal of Machine Learning Research9, 2579–2605 (2008)
Maaten, L.v.d., Hinton, G.: Visualizing data using t-SNE. Journal of Machine Learning Research9, 2579–2605 (2008)
2008
-
[69]
In: IEEE/CVF Conf
Mao, W., Xu, C., Zhu, Q., Chen, S., Wang, Y.: Leapfrog diffusion model for stochastic trajectory prediction. In: IEEE/CVF Conf. Comput. Vision Pattern Recog. pp. 5517–5526 (2023) 20 T. Westny et al
2023
-
[70]
In: IEEE/CVF Conf
Marchetti, F., Becattini, F., Seidenari, L., Bimbo, A.D.: MANTRA: Memory augmented networks for multiple trajectory prediction. In: IEEE/CVF Conf. Comput. Vision Pattern Recog. pp. 7143–7152 (2020)
2020
-
[71]
In: IEEE Intell
Messaoud, K., Deo, N., Trivedi, M.M., Nashashibi, F.: Trajectory prediction for autonomous driving based on multi-head attention with joint agent-map representation. In: IEEE Intell. Veh. Symp. pp. 165–170 (2021)
2021
-
[72]
IEEE Trans
Messaoud, K., Yahiaoui, I., Verroust-Blondet, A., Nashashibi, F.: Attention based vehicle trajectory prediction. IEEE Trans. Intell. Veh.6(1), 175–185 (2021)
2021
-
[73]
In: IEEE Intell
Moers, T., Vater, L., Krajewski, R., Bock, J., Zlocki, A., Eckstein, L.: The exiD dataset: A real-world trajectory dataset of highly interactive highway scenarios in Germany. In: IEEE Intell. Veh. Symp. pp. 958–964 (2022)
2022
-
[74]
Mohamed, A., Zhu, D., Vu, W., Elhoseiny, M., Claudel, C.: Social-Implicit: Re- thinking trajectory prediction evaluation and the effectiveness of implicit maximum likelihood estimation. In: Eur. Conf. Comput. Vision. pp. 463–479 (2022)
2022
-
[75]
In: AAAI Conference on Artificial Intelligence
Morris, C., Ritzert, M., Fey, M., Hamilton, W.L., Lenssen, J.E., Rattan, G., Grohe, M.: Weisfeiler and leman go neural: Higher-order graph neural networks. In: AAAI Conference on Artificial Intelligence. pp. 4602–4609 (2019)
2019
-
[76]
In: Proceedings of the AAAI Conference on Artificial Intelligence
Park, D., Jeong, J., Yoon, K.J.: Improving transferability for cross-domain trajec- tory prediction via neural stochastic differential equation. In: Proceedings of the AAAI Conference on Artificial Intelligence. vol. 38, pp. 10145–10154 (2024)
2024
-
[77]
Park, S.H., Lee, G., Seo, J., Bhat, M., Kang, M., Francis, J., Jadhav, A., Liang, P.P., Morency, L.P.: Diverse and admissible trajectory forecasting through multimodal context understanding. In: Eur. Conf. Comput. Vision. pp. 282–298 (2020)
2020
-
[78]
Paszke, A., Gross, S., Massa, F., Lerer, A., Bradbury, J., Chanan, G., Killeen, T., Lin, Z., Gimelshein, N., Antiga, L., et al.: PyTorch: An imperative style, high-performance deep learning library. In: Int. Conf. Adv. in Neural Inf. Process. Syst. (2019)
2019
-
[79]
In: International Conference on Computer Vision (ICCV)
Pellegrini, S., Ess, A., Schindler, K., Van Gool, L.: You’ll never walk alone: Modeling social behavior for multi-target tracking. In: International Conference on Computer Vision (ICCV). pp. 261–268. IEEE (2009)
2009
-
[80]
Advances in Neural Information Processing Systems37, 30811–30849 (2024)
Penedo, G., Kydlíček, H., Lozhkov, A., Mitchell, M., Raffel, C.A., Von Werra, L., Wolf, T., et al.: The fineweb datasets: Decanting the web for the finest text data at scale. Advances in Neural Information Processing Systems37, 30811–30849 (2024)
2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.