A Systematic Approach to Multi-Agent AI from Advanced Regulatory Control Theory: Safe and Auditable LLM Operator Agents for Process Control
Pith reviewed 2026-07-01 01:36 UTC · model grok-4.3
The pith
Mapping each process control loop to a dedicated LLM agent and encapsulating priority logic in an orchestrator allows the multi-agent system to inherit deterministic safety from advanced regulatory control theory.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central discovery is that the safety properties of an ARC chain, in which every constraint conflict is resolved deterministically by the orchestrator, transfer directly to the multi-agent LLM system when each feedback loop is mapped to one operator agent and the interaction logic is encapsulated separately.
What carries the argument
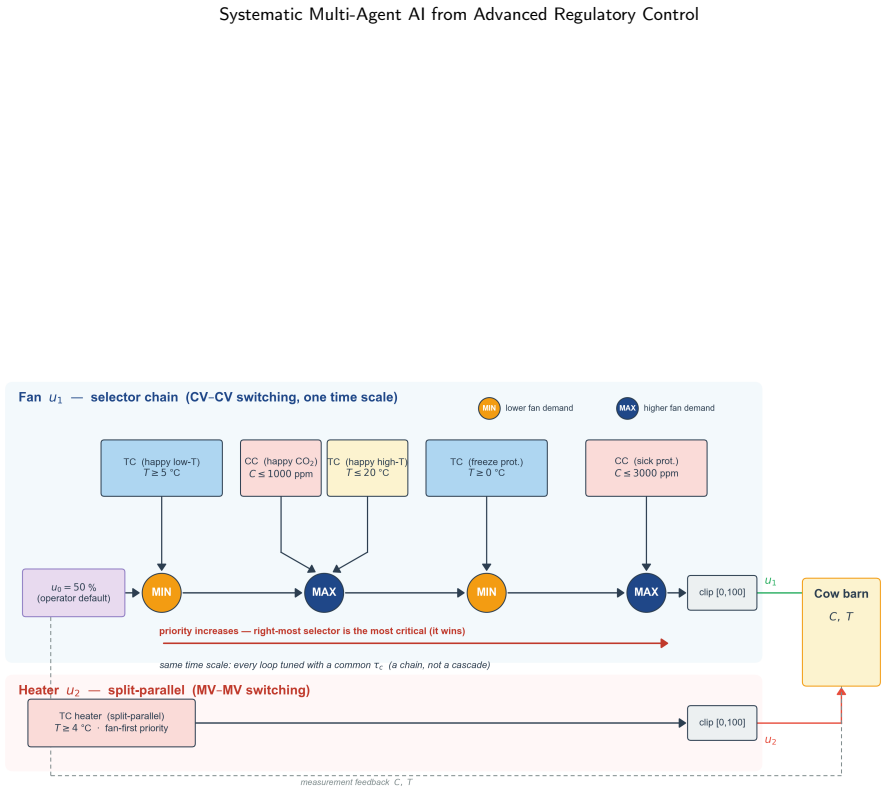
The orchestrator agent that encapsulates the ARC chain's MIN/MAX selectors, override paths, and priority logic to enforce deterministic conflict resolution.
If this is right
- Each LLM operator agent receives a contained task scope defined by its controlled variable, setpoint, chain priority, and selector kind.
- Constraint conflicts are always resolved according to the ARC priorities regardless of LLM outputs.
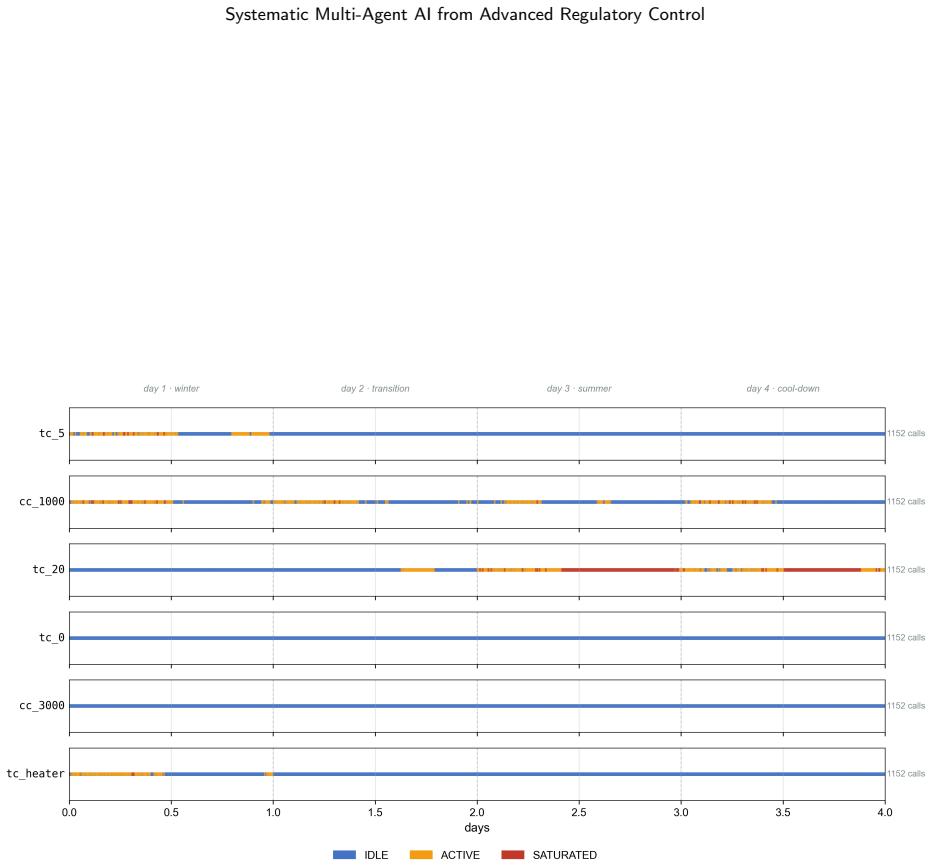
- The system generates auditable trajectories with accompanying rationales suitable for a control campaign logbook.
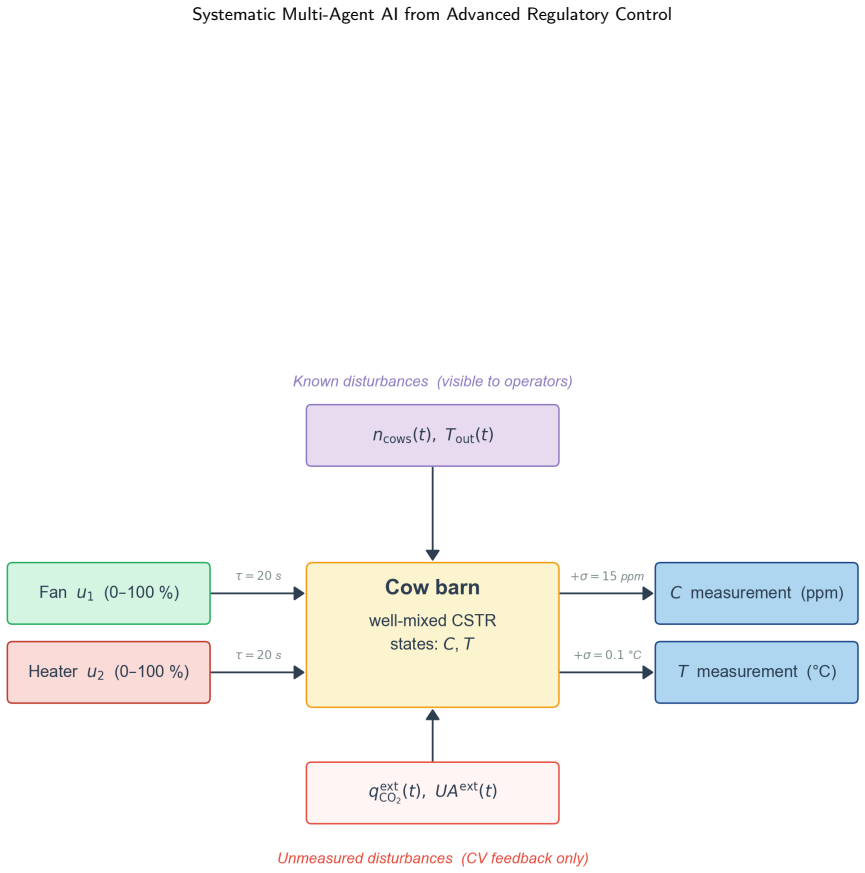
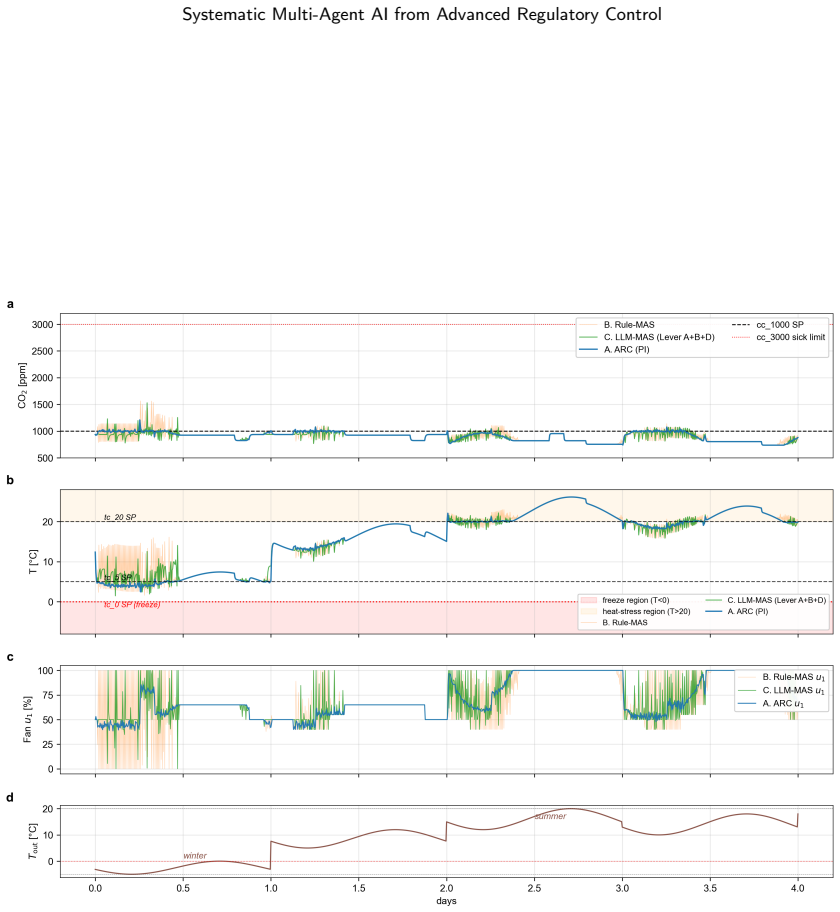
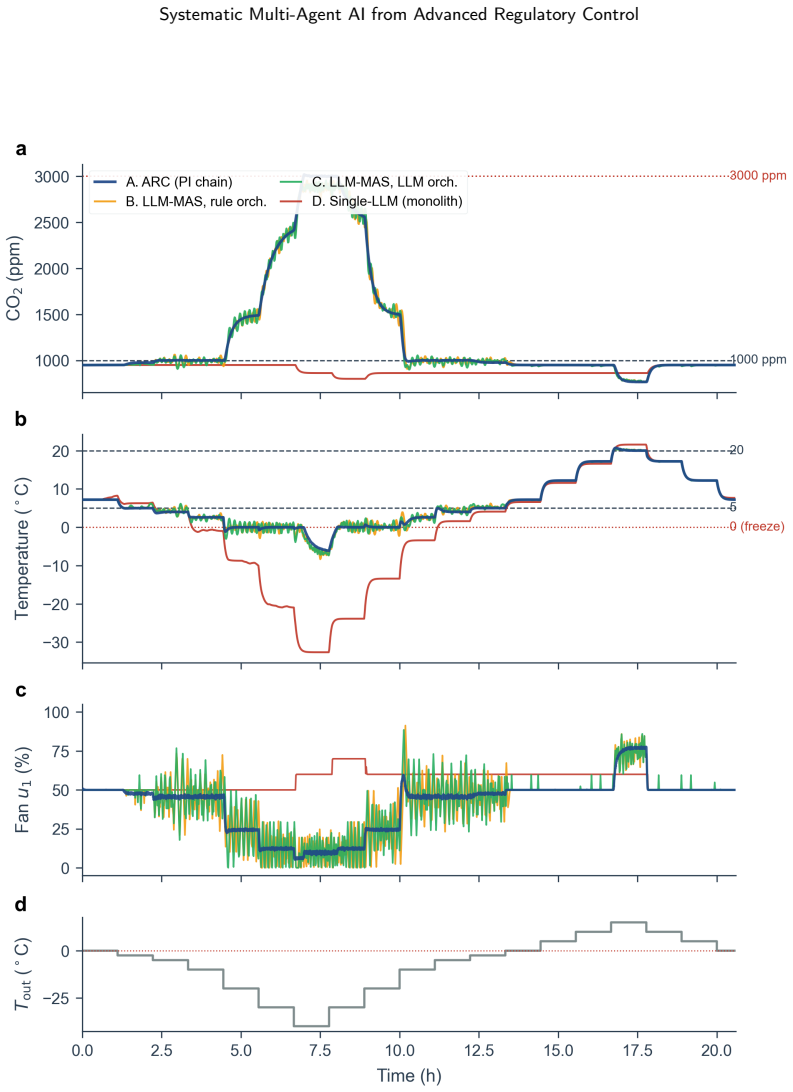
- Performance is demonstrated on a 4-day dairy-barn ventilation scenario using 7B models on consumer hardware.
Where Pith is reading between the lines
- The approach may generalize to other engineering domains that use hierarchical priority structures for safety.
- By handling conflicts outside the LLMs, the method could lower the bar for using smaller, locally-run models in safety-critical settings.
- Future tests could examine whether the deterministic layer reduces the frequency of unsafe proposals from the agents themselves.
Load-bearing premise
The orchestrator must faithfully implement the ARC selector and priority logic without allowing any LLM output to override the deterministic resolution of conflicts.
What would settle it
A run of the dairy-barn ventilation scenario in which an LLM-proposed action that violates a higher-priority constraint is executed because the orchestrator did not intervene.
Figures
read the original abstract
Recent literature shows that large language models (LLMs) are useful for general-purpose tasks yet perform poorly on specific domain ones. One reason is the difficulty of supplying narrow context to a general-purpose model and of bounding the task it is asked to perform. It is possible to hypothesise that a multi-agent reformulation under process-control principles offers a route to address those points, since control theory provides a discipline of decomposing a system into elements of contained scope, each defending one controlled variable, with conflicts resolved by structural priority: MIN/MAX selector networks for CV-CV switching and split-range (split-parallel) logic for MV-MV switching. The present work proposes such a reformulation, derived from Advanced Regulatory Control (ARC) theory. Each feedback loop in the ARC chain is mapped to one specialised LLM operator agent carrying the loop's control-theoretic context (controlled variable, setpoint, chain priority, selector kind). The chain's interaction logic (MIN/MAX selectors, override paths) is encapsulated as a single orchestrator agent. Two orchestrator variants are tested: a deterministic rule chain, and a Claude-based LLM orchestrator at a slower tier. The control principles limit each agent's task and inform how its limitations are handled. The multi-agent system inherits the safety property of the ARC chain: every constraint conflict is resolved deterministically by the orchestrator, regardless of the LLM output. Evaluated on a dairy-barn ventilation case over a 4-day mixed-season scenario, Qwen 2.5 7B Instruct operator agents running offline on a 24 GB consumer GPU at a 5-minute cadence produce auditable trajectories, each paired with an operator-voice rationale that supports a control campaign logbook.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes reformulating multi-agent LLM systems for process control by mapping Advanced Regulatory Control (ARC) structures to specialized LLM operator agents (one per feedback loop, carrying CV, setpoint, priority, and selector type) and an orchestrator agent that encapsulates MIN/MAX selectors and split-range logic. Two orchestrator variants are tested (deterministic rule chain and Claude-based LLM). The central claim is that the multi-agent system inherits ARC safety: constraint conflicts are resolved deterministically by the orchestrator regardless of LLM outputs. Evaluation on a 4-day dairy-barn ventilation scenario with Qwen 2.5 7B Instruct agents (offline, 5-min cadence) yields auditable trajectories paired with operator-voice rationales for a control logbook.
Significance. If the safety-inheritance claim holds with a deterministic orchestrator, the work would supply a control-theoretic decomposition that bounds LLM scope and supplies auditable rationales, addressing a recognized weakness of general-purpose LLMs on narrow domain tasks. The explicit mapping from ARC elements to agents and the production of logbook-compatible outputs constitute concrete strengths for industrial applicability.
major comments (1)
- [Abstract] Abstract: the claim that 'every constraint conflict is resolved deterministically by the orchestrator, regardless of the LLM output' is load-bearing for the safety-inheritance result, yet the manuscript explicitly tests a Claude-based LLM orchestrator variant. An LLM orchestrator is non-deterministic and can generate outputs that fail to enforce the ARC selector/priority logic or permit operator-agent outputs to influence resolution, directly contradicting the 'regardless' guarantee for that variant. The dairy-barn evaluation does not state which orchestrator was active, so the reported trajectories cannot be used to verify the central safety property.
minor comments (2)
- [Evaluation] The manuscript should add a dedicated results subsection (or table) reporting quantitative constraint-violation counts or safety-incident rates separately for the deterministic and LLM orchestrator variants.
- [Method] Notation for selector kinds (MIN/MAX, split-range) and priority ordering should be defined once in a table or figure caption rather than repeated in agent descriptions.
Simulated Author's Rebuttal
We thank the referee for the detailed reading and for identifying the tension between the safety claim and the tested orchestrator variants. We agree that the abstract requires clarification to avoid overstating the deterministic guarantee for the LLM-orchestrator case. Below we respond to the single major comment.
read point-by-point responses
-
Referee: [Abstract] Abstract: the claim that 'every constraint conflict is resolved deterministically by the orchestrator, regardless of the LLM output' is load-bearing for the safety-inheritance result, yet the manuscript explicitly tests a Claude-based LLM orchestrator variant. An LLM orchestrator is non-deterministic and can generate outputs that fail to enforce the ARC selector/priority logic or permit operator-agent outputs to influence resolution, directly contradicting the 'regardless' guarantee for that variant. The dairy-barn evaluation does not state which orchestrator was active, so the reported trajectories cannot be used to verify the central safety property.
Authors: We accept the observation. The safety-inheritance statement in the abstract was intended to apply strictly to the deterministic rule-chain orchestrator; the Claude-based variant was included only as a comparative experiment and does not inherit the same guarantee. The dairy-barn trajectories were generated with the deterministic orchestrator. We will revise the abstract to qualify the claim explicitly, add a sentence in Section 4 stating which orchestrator variant produced the reported results, and include a short paragraph contrasting the two variants with respect to the deterministic resolution property. revision: yes
Circularity Check
No significant circularity; safety claim rests on external ARC structure
full rationale
The paper maps ARC feedback loops to LLM operator agents and encapsulates selector/priority logic in an orchestrator, asserting that the multi-agent system inherits deterministic conflict resolution from ARC theory. No equations, fitted parameters, or self-citations are shown that reduce this inheritance to a construction internal to the LLM outputs or to prior work by the same authors. The claim is presented as a direct structural transfer from established control theory, with the dairy-barn evaluation serving as separate empirical illustration rather than the source of the safety property.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Plantwidecontrol:thesearchfortheself-optimizingcontrolstructure,
S.Skogestad,“Plantwidecontrol:thesearchfortheself-optimizingcontrolstructure,”JournalofProcessControl,vol.10,no.5,pp.487–507, 2000
2000
-
[2]
Baldea and P
M. Baldea and P. Daoutidis,Dynamics and Nonlinear Control of Integrated Process Systems. Cambridge University Press, 2012
2012
-
[3]
W. L. Luyben, B. D. Tyreus, and M. L. Luyben,Plantwide Process Control. McGraw-Hill, 1998
1998
-
[4]
Constrained control of distillation columns,
A. Maarleveld and J. Rijnsdorp, “Constrained control of distillation columns,”Automatica, vol. 6, pp. 51–58, 1970
1970
-
[5]
F. G. Shinskey,Controlling Multivariable Processes. Instrument Society of America, 1981
1981
-
[6]
Feedback control for optimal process operation,
S. Engell, “Feedback control for optimal process operation,”Journal of Process Control, vol. 17, no. 3, pp. 203–219, 2007
2007
-
[7]
Advanced control using decomposition and simple elements,
S. Skogestad, “Advanced control using decomposition and simple elements,”Annual Reviews in Control, vol. 56, pp. 100903, 2023
2023
-
[8]
Advanced PID architectures for tracking changing active constraints
S.Skogestad,“AdvancedPIDarchitecturesfortrackingchangingactiveconstraints,”arXivpreprintarXiv:2605.18463,2026.Extendedjournal version of the paper presented at the IFAC World Congress 2026.https://arxiv.org/abs/2605.18463
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[9]
Multi-inputsingle-outputcontrolforextendingoperatingrange:useofsplitrangeandmid-ranging,
A.Reyes-LúaandS.Skogestad,“Multi-inputsingle-outputcontrolforextendingoperatingrange:useofsplitrangeandmid-ranging,”Journal of Process Control, vol. 91, pp. 1–11, 2020
2020
-
[10]
Changingbetweenactiveconstraintsinthepresenceofuncertainty,
A.Reyes-Lúa,C.Zotică,T.Das,D.Krishnamoorthy,andS.Skogestad,“Changingbetweenactiveconstraintsinthepresenceofuncertainty,” IFAC-PapersOnLine, vol. 52, no. 1, pp. 219–224, 2019
2019
-
[11]
Online process optimization with active constraint set changes using a support vector machine classifier,
D. Krishnamoorthy and S. Skogestad, “Online process optimization with active constraint set changes using a support vector machine classifier,”Industrial & Engineering Chemistry Research, vol. 61, no. 28, pp. 9970–9979, 2022
2022
-
[12]
Split parallel control: a little known control structure,
K. Forsman, M. Adlouni, and S. Skogestad, “Split parallel control: a little known control structure,”IFAC-PapersOnLine (DYCOPS), vol. 59, no. 6, pp. 552–557, 2025
2025
-
[13]
FinCon: A synthesized LLM multi-agent system with conceptual verbal reinforcement for enhanced financial decision making,
Y. Yu, Z. Yao, H. Li, Z. Deng et al., “FinCon: A synthesized LLM multi-agent system with conceptual verbal reinforcement for enhanced financial decision making,” inAdvances in Neural Information Processing Systems (NeurIPS), 2024
2024
-
[14]
TradingAgents: Multi-agents LLM financial trading framework,
Y. Xiao, E. Sun, D. Luo, and W. Wang, “TradingAgents: Multi-agents LLM financial trading framework,”arXiv preprint arXiv:2412.20138, 2024
-
[15]
D.J.Moore,“Ataxonomyofhierarchicalmulti-agentsystems:Designpatterns,coordinationmechanisms,andindustrialapplications,”arXiv preprint arXiv:2508.12683, 2025
-
[16]
Chain-of-thought prompting elicits reasoning in large language models,
J. Wei, X. Wang, D. Schuurmans, et al., “Chain-of-thought prompting elicits reasoning in large language models,” inAdvances in Neural Information Processing Systems (NeurIPS), 2022
2022
-
[17]
ReAct: Synergizing Reasoning and Acting in Language Models
S. Yao, J. Zhao, D. Yu, et al., “ReAct: Synergizing reasoning and acting in language models,”arXiv preprint arXiv:2210.03629, 2022
work page internal anchor Pith review Pith/arXiv arXiv 2022
-
[18]
Language models as zero-shot planners: Extracting actionable knowledge for embodied agents,
W. Huang, P. Abbeel, D. Pathak, and I. Mordatch, “Language models as zero-shot planners: Extracting actionable knowledge for embodied agents,” inInternational Conference on Machine Learning (ICML), 2022
2022
-
[19]
Generative Agents: Interactive Simulacra of Human Behavior
J.S.Park,J.C.O’Brien,C.J.Cai,M.R.Morris,P.Liang,andM.S.Bernstein,“Generativeagents:Interactivesimulacraofhumanbehavior,” arXiv preprint arXiv:2304.03442, 2023
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[20]
Wooldridge,An Introduction to MultiAgent Systems, 2nd ed
M. Wooldridge,An Introduction to MultiAgent Systems, 2nd ed. Wiley, 2009
2009
-
[21]
Russell and P
S. Russell and P. Norvig,Artificial Intelligence: A Modern Approach, 4th ed. Pearson, 2020
2020
-
[22]
Implementation of multi-agents based system for process supervision in large-scale chemical plants,
S. Natarajan and R. Srinivasan, “Implementation of multi-agents based system for process supervision in large-scale chemical plants,” Computers & Chemical Engineering, vol. 60, pp. 182–196, 2014, DOI: 10.1016/j.compchemeng.2013.08.012
-
[23]
Multi-agent systems for chemical engineering: A review and perspective,
S. Rupprecht, Q. Gao, T. Karia, and A.M. Schweidtmann, “Multi-agent systems for chemical engineering: A review and perspective,”arXiv preprint arXiv:2508.07880, 2025
-
[24]
Improving process systems engineering with specialized multi-agent large language models,
F. A. R.D. Lima et al., “Improving process systems engineering with specialized multi-agent large language models,”Chemical Engineering Journal Advances, 2026, DOI: 10.1016/j.ceja.2026.101141
-
[25]
MAASC: Multi-agentic architecture specialised for control,
E. A. Costa, S. Skogestad, and I. B.R. Nogueira, “MAASC: Multi-agentic architecture specialised for control,”Journal of Process Control, vol. 162, p. 103702, 2026, DOI: 10.1016/j.jprocont.2026.103702
-
[26]
Autonomous industrial control using an agentic framework with large language models,
J. Vyas and M. Mercangöz, “Autonomous industrial control using an agentic framework with large language models,”arXiv preprint arXiv:2411.05904, 2024, note: Published as IFAC-PapersOnLine, DOI: 10.1016/j.ifacol.2025.07.170
-
[27]
Onthetheoreticallimitationsofembedding-basedretrieval,
O.Weller,M.Boratko,I.Naim,J.Leeetal.,“Onthetheoreticallimitationsofembedding-basedretrieval,”arXivpreprintarXiv:2508.21038, 2025. Page 36 of 37 Systematic Multi-Agent AI from Advanced Regulatory Control
-
[28]
K.J.ÅströmandT.Hägglund,PIDControllers:Theory,Design,andTuning,2nded.InstrumentSocietyofAmerica,ResearchTrianglePark, NC, 1995
1995
-
[29]
Simple analytic rules for model reduction and PID controller tuning,
S. Skogestad, “Simple analytic rules for model reduction and PID controller tuning,”Journal of Process Control, vol. 13, pp. 291–309, 2003
2003
-
[30]
ClaudeAPIdocumentation:Messages,structuredoutputs,promptcaching,
Anthropic,“ClaudeAPIdocumentation:Messages,structuredoutputs,promptcaching,”https://platform.claude.com/docs,accessed 2026
2026
-
[31]
Validityofthesingleprocessorapproachtoachievinglargescalecomputingcapabilities,
G.M.Amdahl,“Validityofthesingleprocessorapproachtoachievinglargescalecomputingcapabilities,”inProceedingsoftheAFIPSSpring Joint Computer Conference, vol. 30, pp. 483–485, 1967
1967
-
[32]
Efficient Memory Management for Large Language Model Serving with PagedAttention
W. Kwon, Z. Li, S. Zhuang, Y. Sheng, L. Zheng, C. H. Yu, J. Gonzalez, H. Zhang, and I. Stoica, “Efficient memory management for large language model serving with PagedAttention,” inProceedings of the 29th Symposium on Operating Systems Principles (SOSP), 2023.arXiv preprint arXiv:2309.06180
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[33]
Efficiently scaling transformer inference,
R. Pope, S. Douglas, A. Chowdhery, J. Devlin, J. Bradbury, J. Heek, K. Xiao, S. Agrawal, and J. Dean, “Efficiently scaling transformer inference,” inProceedings of Machine Learning and Systems (MLSys), 2023.arXiv preprint arXiv:2211.05102
-
[34]
Skogestad and I
S. Skogestad and I. Postlethwaite,Multivariable Feedback Control: Analysis and Design, 2nd ed. Wiley, 2005
2005
-
[35]
Aheuristicapproachtothedesignoflinearmultivariableinteractingcontrolsystems,
A.Niederlinski,“Aheuristicapproachtothedesignoflinearmultivariableinteractingcontrolsystems,”Automatica,vol.7,no.6,pp.691–701, 1971
1971
-
[36]
Distributedsubgradientmethodsformulti-agentoptimization,
A.NedićandA.Ozdaglar,“Distributedsubgradientmethodsformulti-agentoptimization,”IEEETransactionsonAutomaticControl,vol.54, no. 1, pp. 48–61, 2009
2009
-
[37]
Distributed MPC strategies with application to power system automatic generation control,
A. N. Venkat, I. A. Hiskens, J. B. Rawlings, and S. J. Wright, “Distributed MPC strategies with application to power system automatic generation control,”IEEE Transactions on Control Systems Technology, vol. 16, no. 6, pp. 1192–1206, 2008
2008
-
[38]
Distributedmodelpredictivecontrol,
E.Camponogara,D.Jia,B.H.Krogh,andS.Talukdar,“Distributedmodelpredictivecontrol,”IEEEControlSystemsMagazine,vol.22,no.1, pp. 44–52, 2002
2002
-
[39]
Do as I can, not as I say: Grounding language in robotic affordances,
M. Ahn, A. Brohan, N. Brown, et al., “Do as I can, not as I say: Grounding language in robotic affordances,” inProceedings of CoRL 2022, 2022. Page 37 of 37
2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.