DualBrep: A Dual-Field Continuous Representation for B-rep Modelling
Pith reviewed 2026-07-01 02:51 UTC · model grok-4.3
The pith
DualBrep encodes CAD models using dual scalar fields in a shared latent space to enable joint generation of B-rep geometry and topology.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
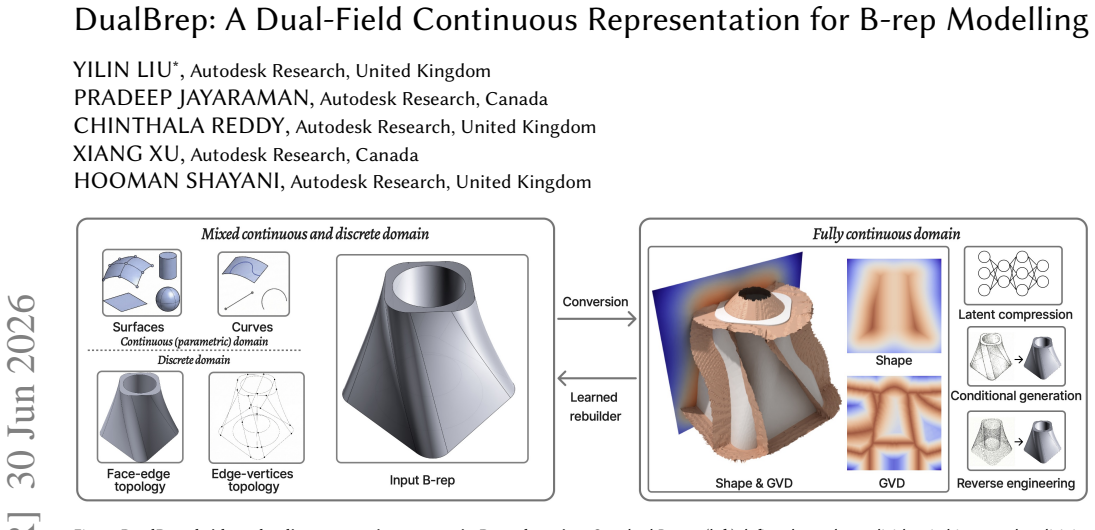
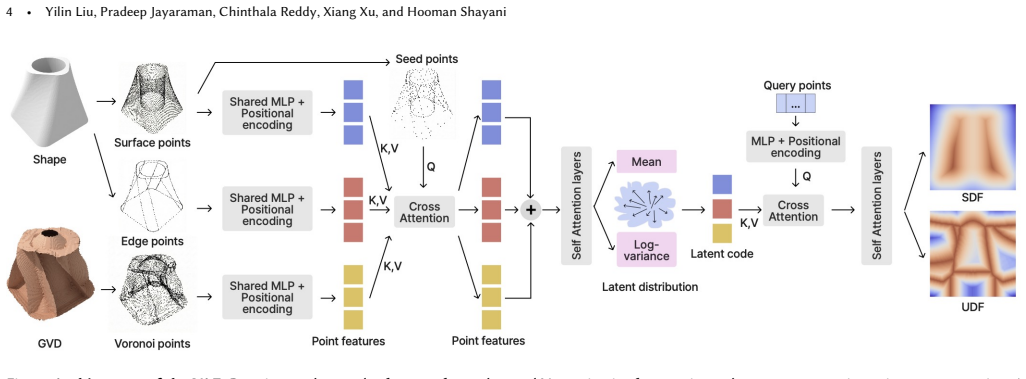
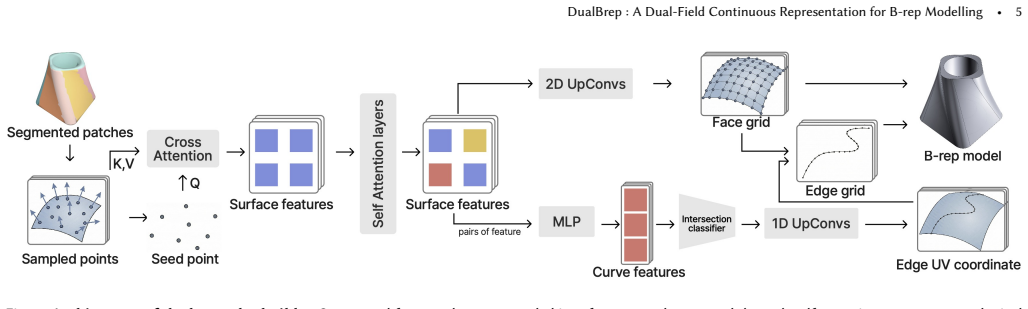
DualBrep encodes a CAD model using dual scalar fields: a Signed Distance Function representing global shape geometry, and an Unsigned Distance Field implicitly encoding topological structure via a Voronoi partitioning of surface elements. These are compressed into a single latent space from which a Flow Matching model samples geometry and topology jointly. A neural rebuilder extracts explicit B-rep models directly from the continuous dual fields, supporting both prismatic and free-form primitives.
What carries the argument
The dual scalar fields consisting of an SDF for geometry and a UDF for topology via Voronoi partitioning, compressed into a shared latent space for joint sampling and reconstruction.
If this is right
- Supports arbitrary numbers of faces and surface types without fixed-size padding or sequential tokenization.
- Allows end-to-end optimization since the representation is fully continuous and differentiable.
- Enables sampling of complete B-rep models including topology from a single latent code.
- Provides strong performance in point cloud reverse engineering and generative modeling tasks.
Where Pith is reading between the lines
- The approach could be extended to other domains that combine discrete structures with continuous geometry, such as architectural modeling.
- It may facilitate the creation of hybrid models that mix B-rep with other representations like meshes or voxels in a unified latent space.
- Testing on larger datasets could reveal if the Voronoi partitioning scales to highly complex topologies without loss of connectivity information.
Load-bearing premise
That the dual fields can be compressed into a single latent space while preserving enough information for accurate recovery of explicit B-rep geometry and topology by the neural rebuilder, even for models with varying face counts and surface types.
What would settle it
Running the neural rebuilder on dual fields derived from complex CAD models and checking if the output B-rep matches the input in both surface geometry accuracy and topological connectivity, such as correct face adjacencies and edge loops.
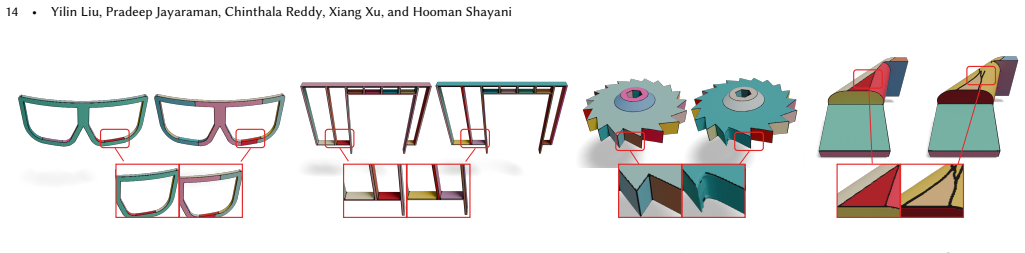
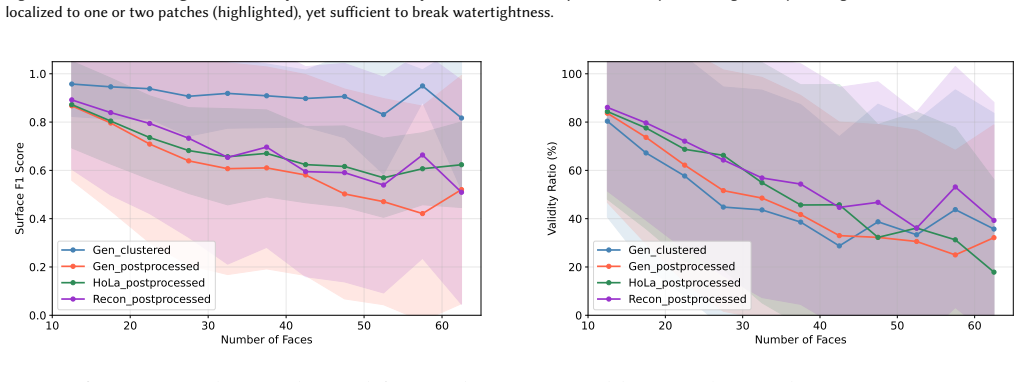
Figures
read the original abstract
Boundary Representation (B-rep) is the most commonly used data format in Computer-Aided Design (CAD) due to its analytical precision and direct support for parametric editing. However, its heterogeneous structure--continuous parametric geometry combined with discrete topological graphs--poses fundamental challenges for deep learning. Existing methods often predict the heterogeneous B-rep graph directly, using fixed-size padding or sequential tokenization to handle varying primitive counts. These approaches struggle with the combinatorial complexity of CAD models. Furthermore, the discrete, non-differentiable nature of graph data prevents end-to-end optimization of geometry and watertightness. In this work, we introduce DualBrep, a novel continuous representation that unifies B-rep geometry and topology within a fully structured Euclidean domain. DualBrep encodes a CAD model using dual scalar fields: a Signed Distance Function (SDF) representing global shape geometry, and an Unsigned Distance Field (UDF) implicitly encoding topological structure via a Voronoi partitioning of surface elements. Rather than processing these fields independently, we compress them into a single latent space. While the dual-field formulation alone provides a flexible, primitive-free segmentation signal that adapts to arbitrary face counts and surface types, the shared latent makes generation tractable. A Flow Matching model can sample geometry and topology jointly from a single code, avoiding the error accumulation that plagues sequential B-rep predictors. Finally, a neural rebuilder extracts explicit B-rep models--comprising both prismatic and free-form primitives--directly from our continuous dual fields. We demonstrate that DualBrep is a robust backbone for CAD learning, achieving strong performance in point cloud reverse engineering and generative modeling via latent flow matching.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces DualBrep, a continuous dual-field representation for B-rep CAD models consisting of an SDF for global geometry and a UDF that implicitly encodes topology via Voronoi partitioning of surface elements. These fields are compressed into a shared latent space from which a Flow Matching model performs joint sampling of geometry and topology; a neural rebuilder then extracts explicit B-rep (prismatic and free-form) directly from the continuous fields. The central claim is that this unified Euclidean-domain representation avoids the combinatorial and non-differentiable difficulties of direct discrete B-rep graph prediction and enables robust performance on point-cloud reverse engineering and latent generative modeling.
Significance. If the dual-field encoding and neural rebuilder can reliably recover accurate explicit B-rep for arbitrary face counts and surface types, the approach would supply a fully differentiable, primitive-free backbone for CAD learning that unifies geometry and topology in a single latent code. The Flow Matching formulation for joint sampling would be a concrete advance over sequential predictors that accumulate errors. The paper supplies no machine-checked proofs or parameter-free derivations, but the continuous formulation itself is a clear conceptual contribution.
major comments (2)
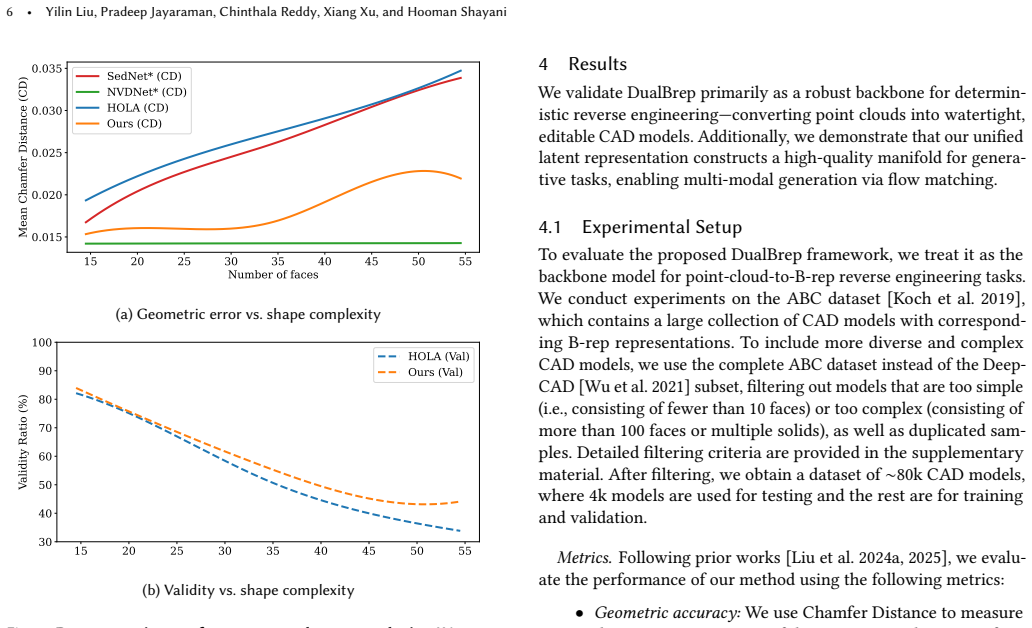
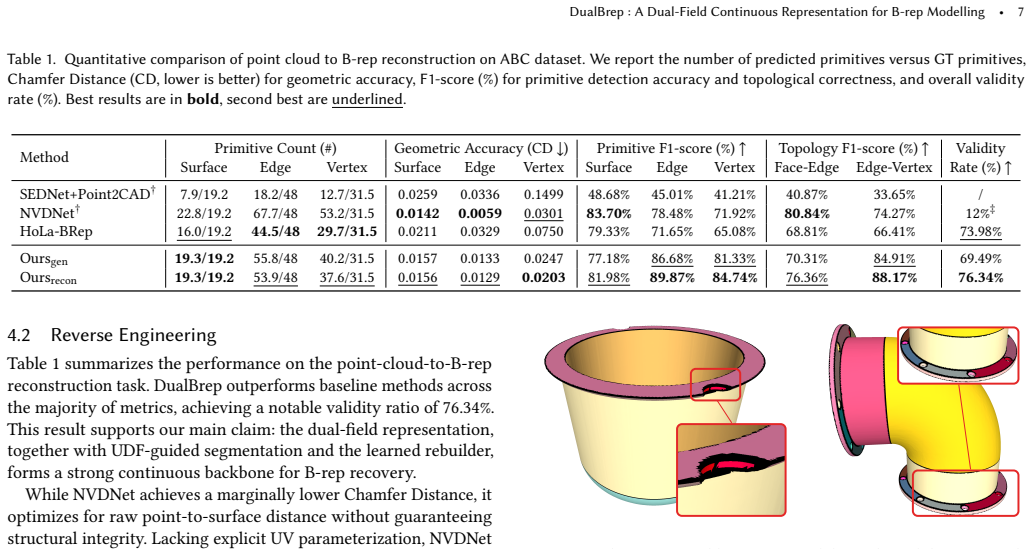
- [Abstract] Abstract: the claim that DualBrep 'achieves strong performance in point cloud reverse engineering and generative modeling' is unsupported by any quantitative results, baselines, error metrics, ablation studies, or dataset statistics. This assertion is load-bearing for the paper's conclusion that the method is 'a robust backbone for CAD learning.'
- The weakest assumption—that compression of the dual fields into a single latent preserves sufficient information for the neural rebuilder to recover accurate explicit B-rep geometry and topology for arbitrary face counts without the error accumulation of sequential methods—is stated but not accompanied by targeted experiments (e.g., scaling curves on face count or surface-type complexity). This directly affects the central unification claim.
minor comments (1)
- [Abstract] The abstract refers to 'prismatic and free-form primitives' but does not clarify how the UDF Voronoi partitioning distinguishes between them or whether the rebuilder outputs analytic surface parameters.
Simulated Author's Rebuttal
We thank the referee for the constructive report and the recommendation for major revision. We address each major comment below, providing clarifications and committing to revisions that strengthen the support for our claims without altering the core contributions.
read point-by-point responses
-
Referee: [Abstract] Abstract: the claim that DualBrep 'achieves strong performance in point cloud reverse engineering and generative modeling' is unsupported by any quantitative results, baselines, error metrics, ablation studies, or dataset statistics. This assertion is load-bearing for the paper's conclusion that the method is 'a robust backbone for CAD learning.'
Authors: We agree that the abstract's performance claim requires explicit quantitative backing to be fully substantiated. The manuscript body includes experimental evaluations on reverse engineering from point clouds and latent generative modeling with Flow Matching, but these details are not summarized in the abstract. We will revise the abstract to incorporate key metrics (e.g., reconstruction accuracy, topological fidelity measures), baseline comparisons, and dataset statistics, ensuring the claim is directly supported. revision: yes
-
Referee: The weakest assumption—that compression of the dual fields into a single latent preserves sufficient information for the neural rebuilder to recover accurate explicit B-rep geometry and topology for arbitrary face counts without the error accumulation of sequential methods—is stated but not accompanied by targeted experiments (e.g., scaling curves on face count or surface-type complexity). This directly affects the central unification claim.
Authors: The paper demonstrates the neural rebuilder's ability to extract B-rep from the dual fields across diverse models, supporting the shared latent's sufficiency in the reported results. However, we acknowledge that dedicated scaling analyses would more rigorously validate robustness to arbitrary face counts and surface types. We will add targeted experiments, including scaling curves on face count and surface-type complexity, to directly address this point in the revised manuscript. revision: yes
Circularity Check
No significant circularity identified
full rationale
The paper proposes DualBrep as a new continuous dual-field encoding (SDF for geometry + Voronoi UDF for topology) compressed to a shared latent, sampled via flow matching, and converted to explicit B-rep via a neural rebuilder. No equations, first-principles derivations, fitted parameters renamed as predictions, or self-citation chains appear in the provided abstract or claims. The central contribution is a methodological unification of geometry and topology into Euclidean fields; the latent compression and rebuilder are presented as empirical engineering choices rather than reductions to prior inputs by construction. No load-bearing step matches any enumerated circularity pattern.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
on Graphics (Proc
Com- plexGen: CAD reconstruction by B-rep chain complex generation.ACM Trans. on Graphics (Proc. SIGGRAPH)41, 4 (2022), 129:1–129:18. Pradeep Kumar Jayaraman, Joseph George Lambourne, Nishkrit Desai, Karl D. D. Willis, Aditya Sanghi, and Nigel J. W. Morris
2022
-
[2]
on Machine Learning Research(2023)
SolidGen: An Autoregressive Model for Direct B-rep Synthesis.Trans. on Machine Learning Research(2023). Pradeep Kumar Jayaraman, Aditya Sanghi, Joseph G. Lambourne, Karl D. D. Willis, Thomas Davies, Hooman Shayani, and Nigel J. W. Morris
2023
-
[3]
on Graphics (Proc
NeuralVDB: High-resolution Sparse Volume Representation using Hierarchical Neural Networks.ACM Trans. on Graphics (Proc. SIGGRAPH)43, 2 (2024), 2:1–2:21. Sebastian Koch, Albert Matveev, Zhongshi Jiang, Francis Williams, Alexey Artemov, Evgeny Burnaev, Marc Alexa, Denis Zorin, and Daniele Panozzo
2024
-
[4]
BRepNet: A topological message passing system for solid models. InProc. IEEE/CVF Conf. on Computer Vision & Pattern Recognition. 12773–12782. Jing Li, Yihang Fu, and Falai Chen. 2025a. DTGBrepGen: A Novel B-rep Generative Model through Decoupling Topology and Geometry. InProc. IEEE/CVF Conf. on Computer Vision & Pattern Recognition. Pu Li, Wenhao Zhang, W...
2025
-
[5]
Flow Matching for Generative Modeling. InProc. Int. Conf. on Learning Representations. Yilin Liu, Jiale Chen, Shanshan Pan, Daniel Cohen-Or, Hao Zhang, and Hui Huang. 2024a. Split-and-Fit: Learning B-Reps via Structure-Aware Voronoi Partitioning. ACM Trans. on Graphics (Proc. SIGGRAPH)43, 4 (2024), 108:1–108:13. Yujia Liu, Anton Obukhov, Jan Dirk Wegner, ...
2024
-
[6]
Lars Mescheder, Michael Oechsle, Michael Niemeyer, Sebastian Nowozin, and Andreas Geiger
HoLa: B-Rep Generation using a Holistic Latent Representation.ACM Transactions on Graphics (SIGGRAPH)44, 4 (2025). Lars Mescheder, Michael Oechsle, Michael Niemeyer, Sebastian Nowozin, and Andreas Geiger
2025
-
[7]
DINOv2: Learning Robust Visual Features without Supervision
Dinov2: Learning robust visual features without supervision.arXiv preprint arXiv:2304.07193(2023). Jeong Joon Park, Peter Florence, Julian Straub, Richard Newcombe, and Steven Love- grove
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[8]
Scalable Diffusion Models with Transformers
Scalable Diffusion Models with Transformers. arXiv preprint arXiv:2212.09748(2022). Xuanchi Ren, Jiahui Huang, Xiaohui Zeng, Ken Museth, Sanja Fidler, and Francis Williams
work page internal anchor Pith review Pith/arXiv arXiv 2022
-
[9]
TripoSR: Fast 3D Object Reconstruction from a Single Image
TripoSR: Fast 3D Object Reconstruction from a Single Image.arXiv preprint arXiv:2403.02151 (2024). Karl DD Willis, Yewen Pu, Jieliang Luo, Hang Chu, Tao Du, Joseph G Lambourne, Armando Solar-Lezama, and Wojciech Matusik
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[10]
ACM Trans
Fusion 360 gallery: A dataset and environment for programmatic cad construction from human design sequences. ACM Trans. on Graphics40, 4 (2021), 1–24. Jiajun Wu, Chengkai Zhang, Tianfan Xue, Bill Freeman, and Josh Tenenbaum
2021
-
[11]
on Graphics (Proc
BrepGen: A B-rep Generative Diffusion Model with Structured Latent Geometry.ACM Trans. on Graphics (Proc. SIGGRAPH) 43, 4 (2024), 119:1–119:14. DualBrep : A Dual-Field Continuous Representation for B-rep Modelling•9 Xiang Xu, Karl DD Willis, Joseph G Lambourne, Chin-Yi Cheng, Pradeep Kumar Jayara- man, and Yasutaka Furukawa
2024
-
[12]
on Graphics (Proc
3DShape2VecSet: A 3D shape representation for neural fields and generative diffusion models.ACM Trans. on Graphics (Proc. SIGGRAPH)42, 4 (2023), 92:1–92:16. Zibo Zhao, Zeqiang Lai, Qingxiang Lin, Yunfei Zhao, et al
2023
-
[13]
Hunyuan3D 2.0: Scaling Diffusion Models for High Resolution Textured 3D Assets Generation
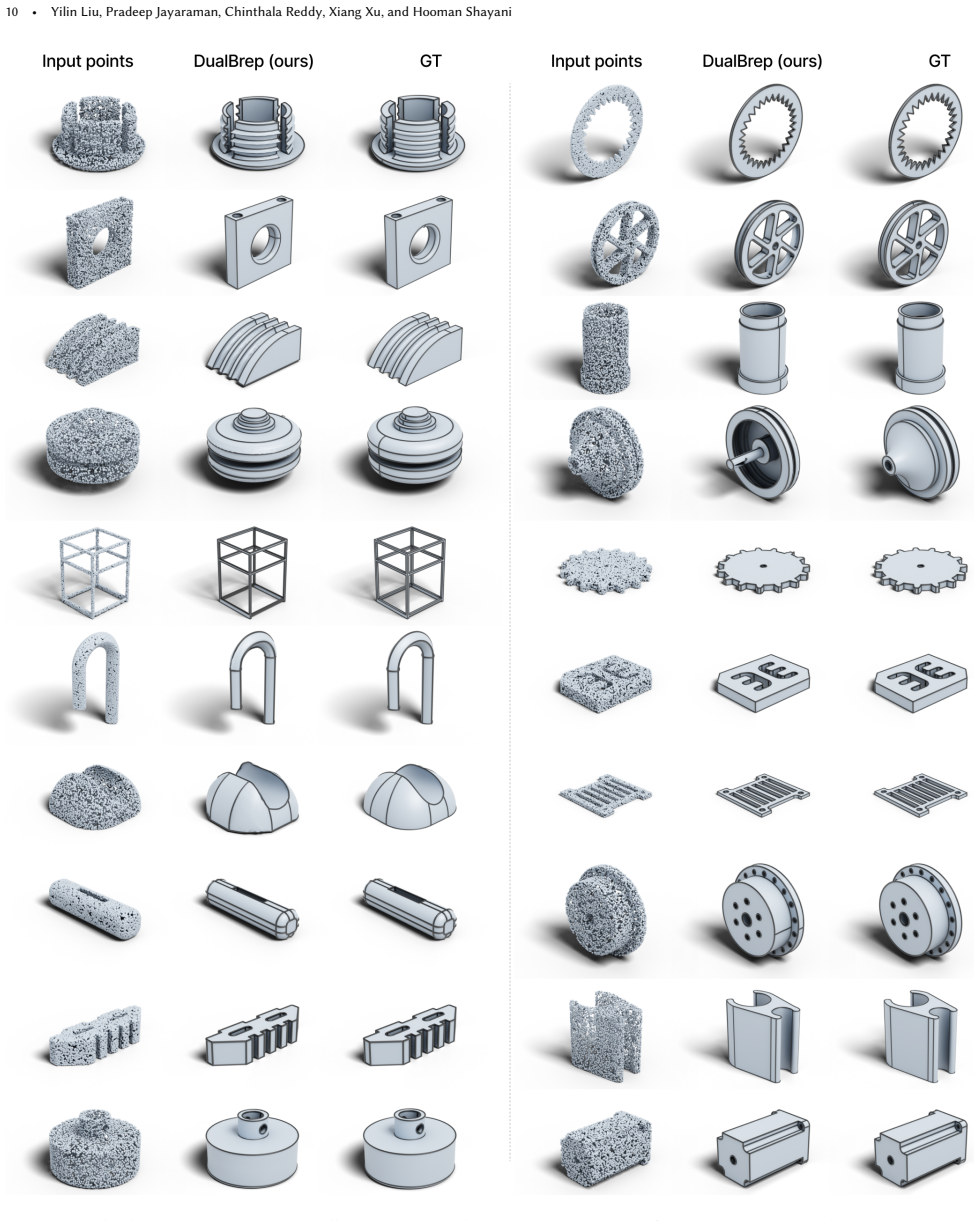
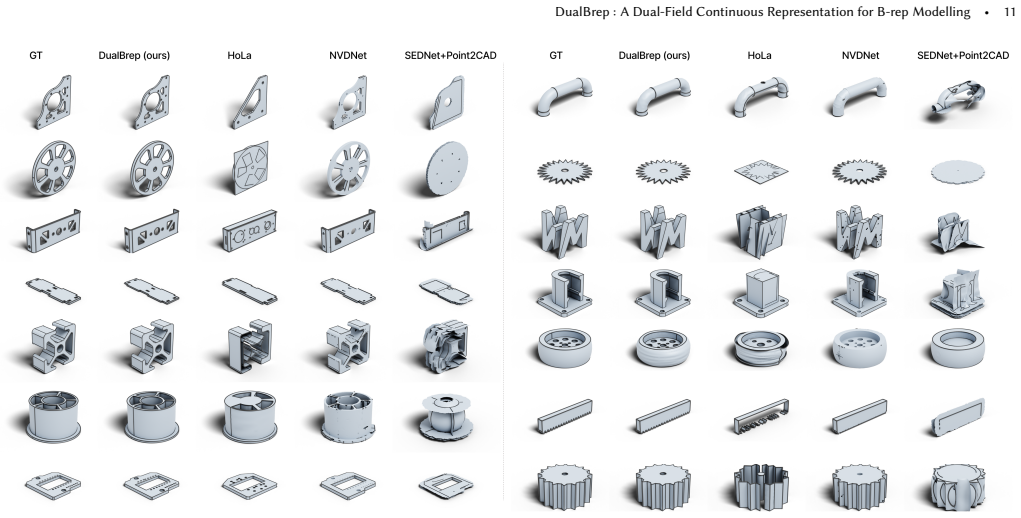
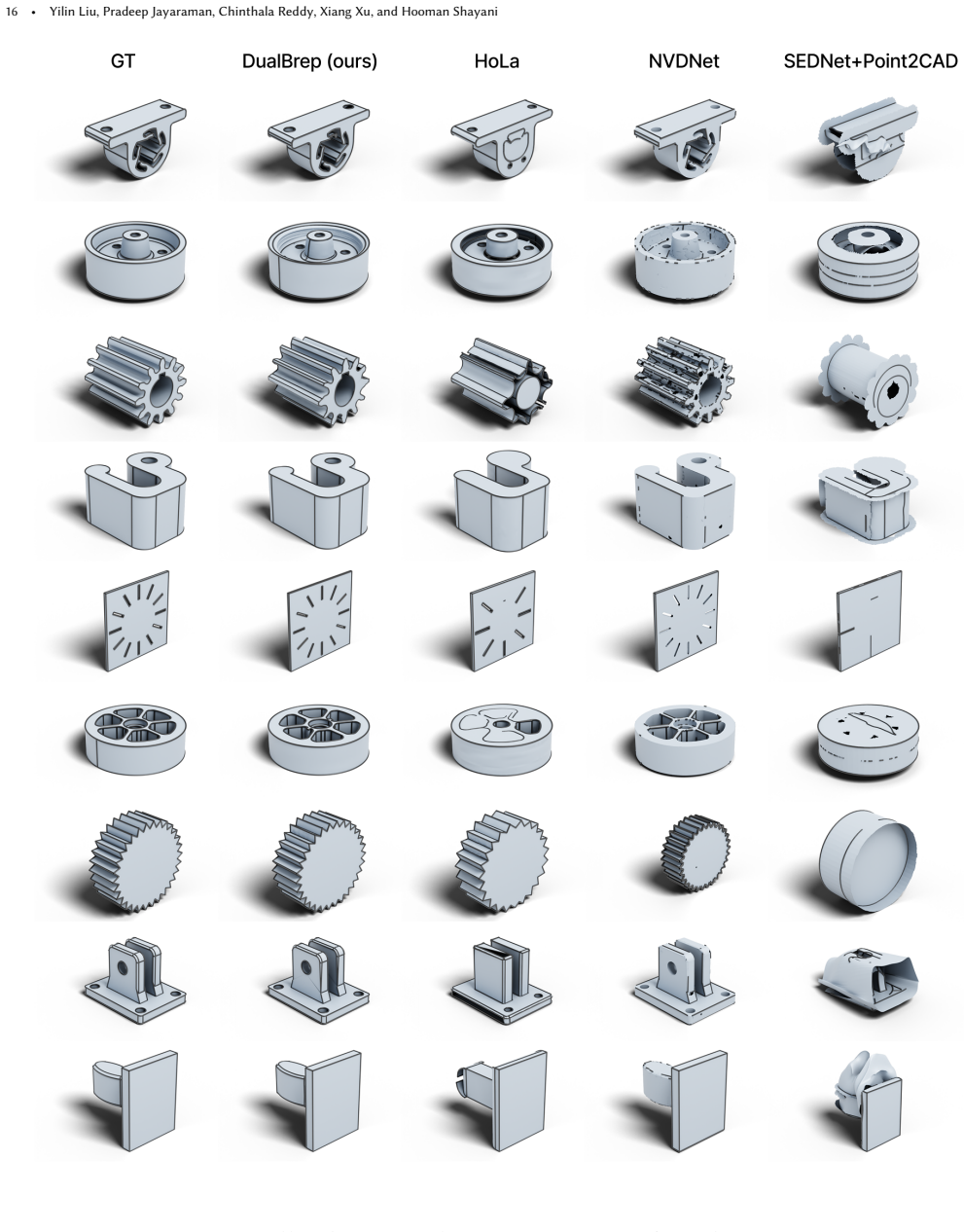
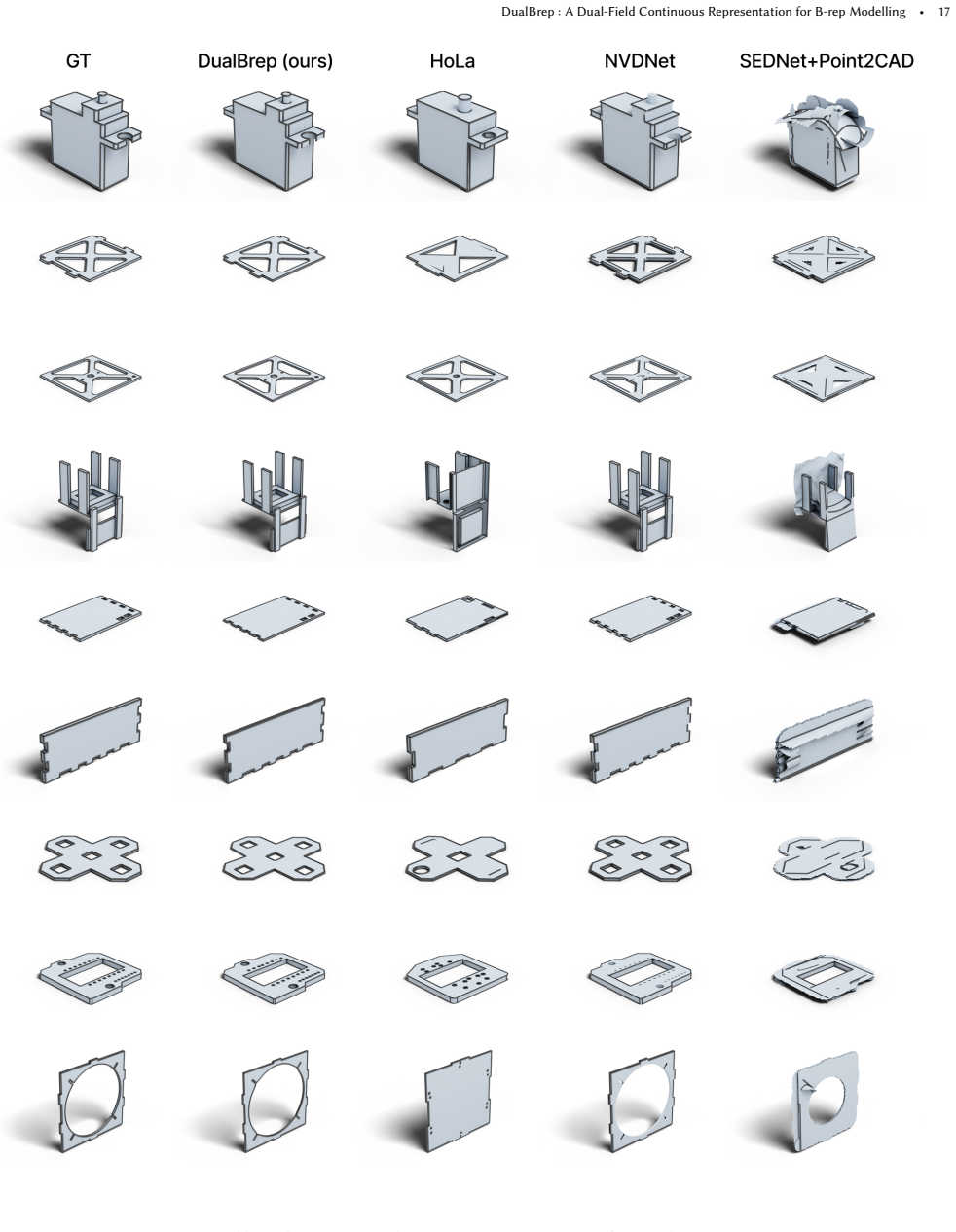
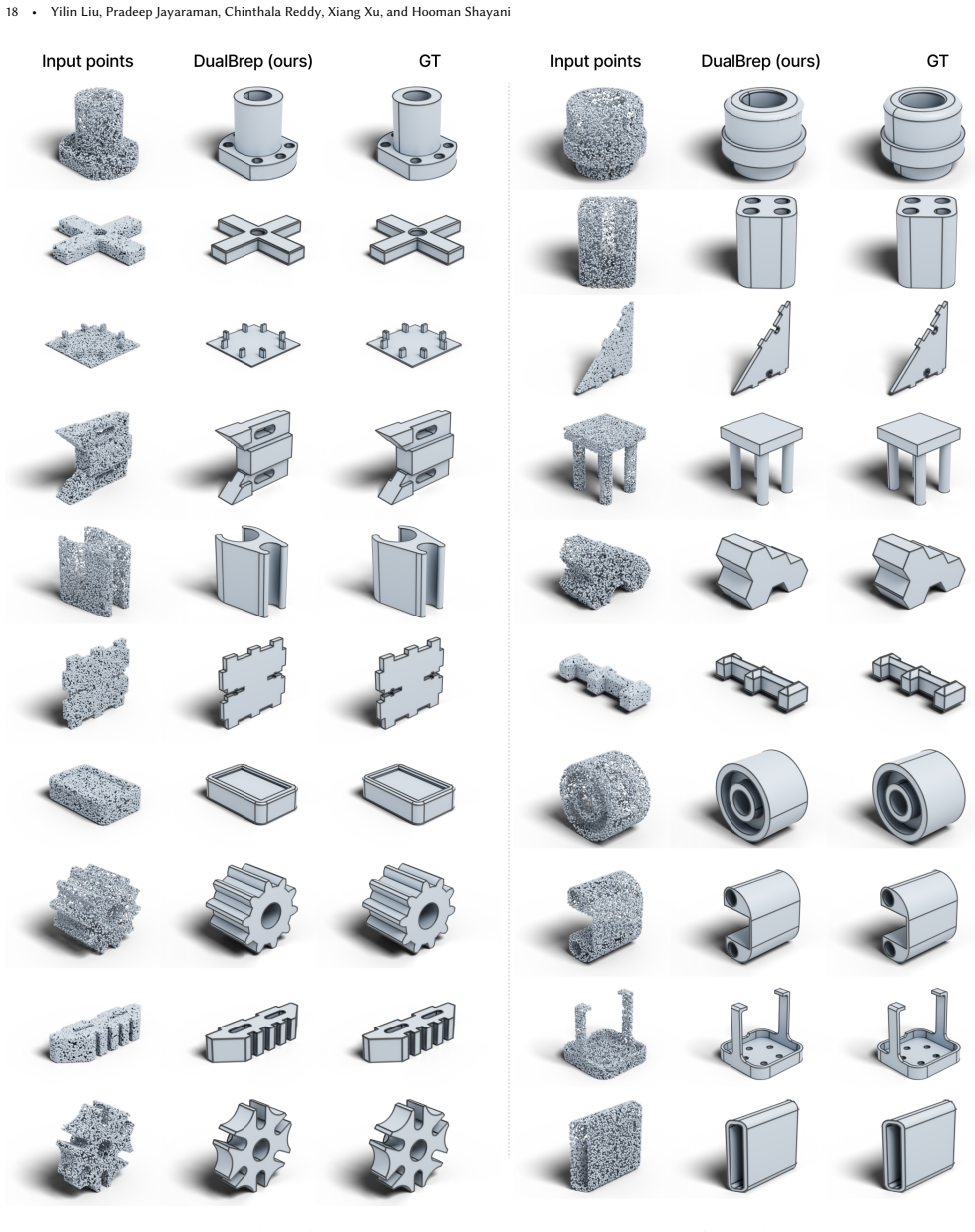
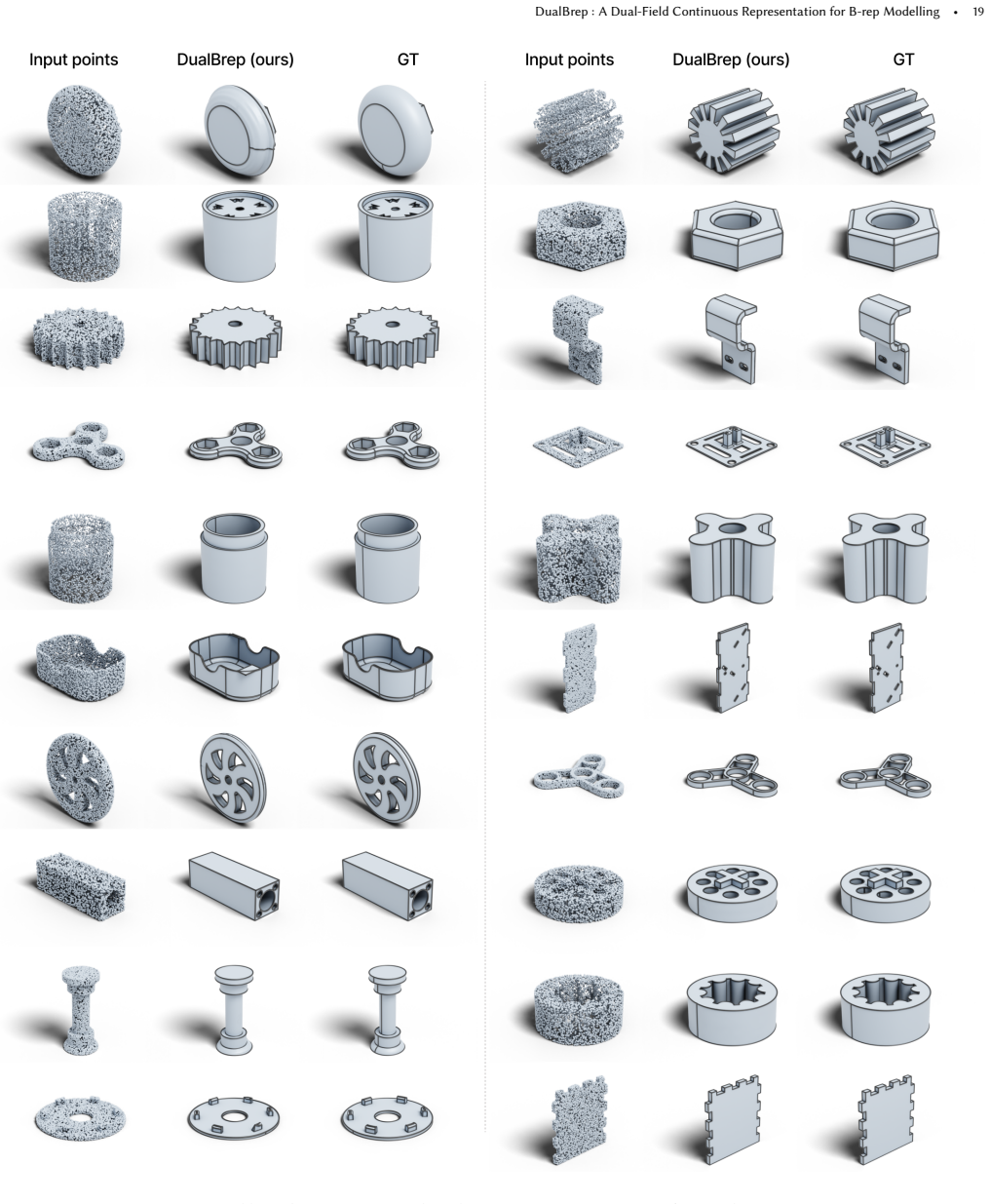
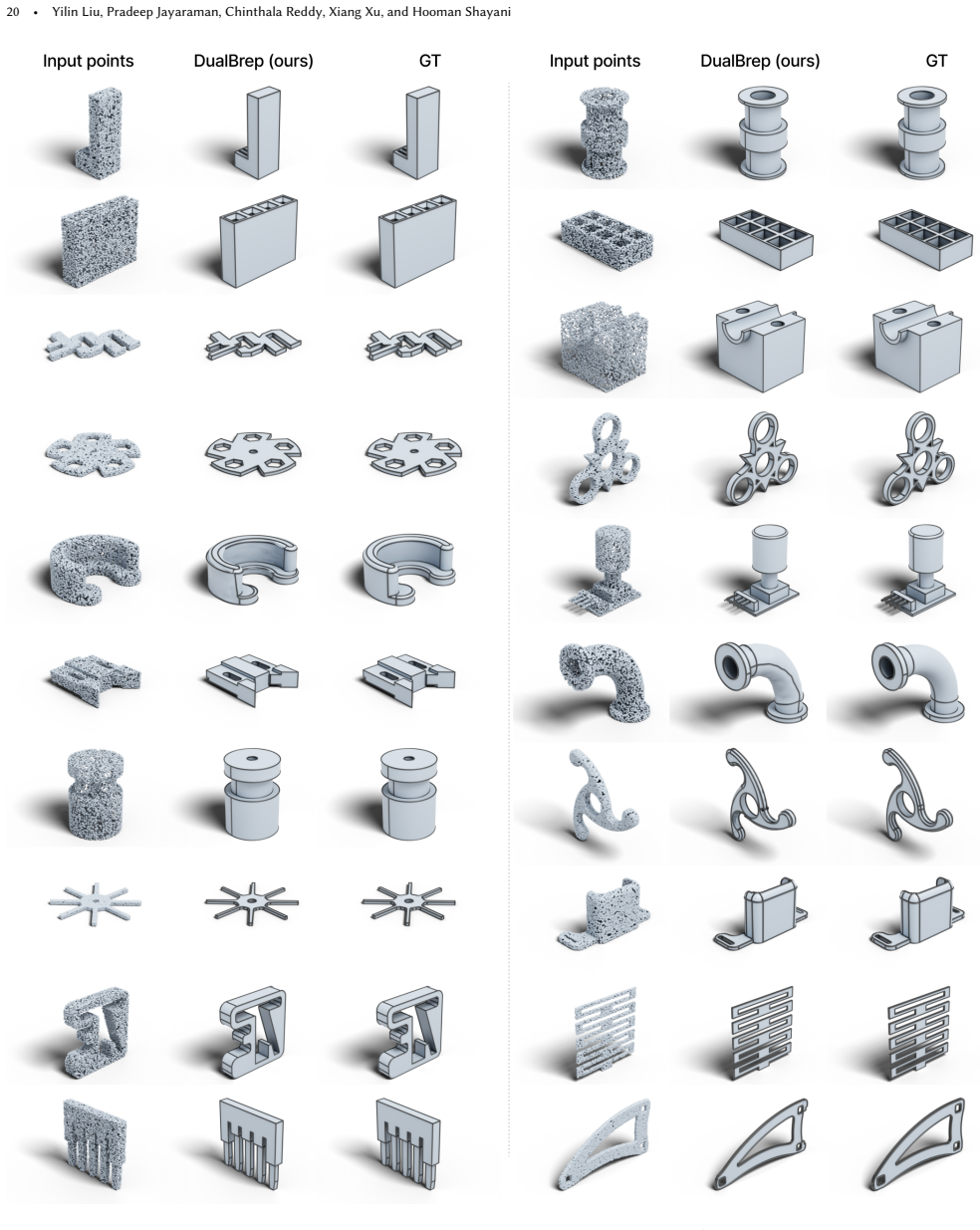
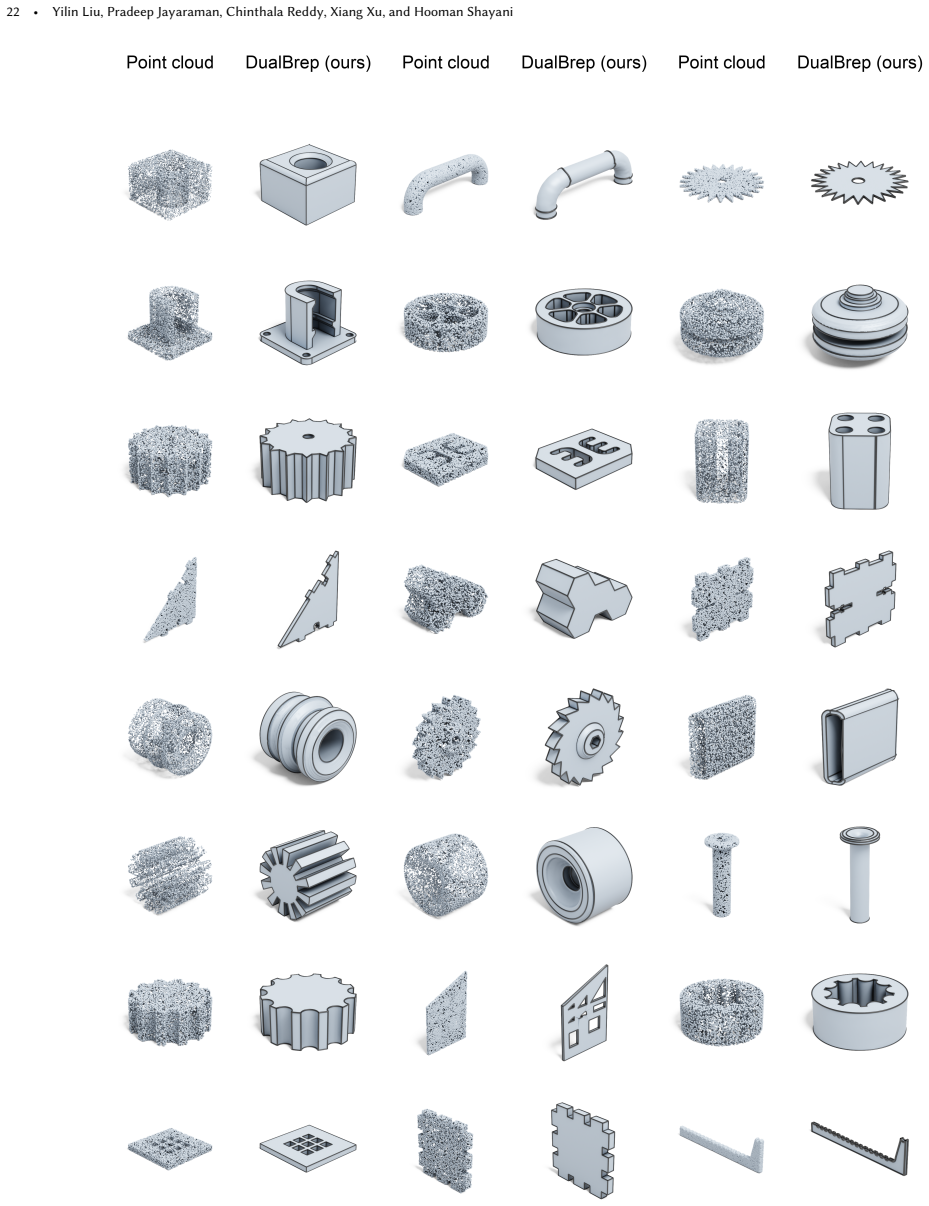
Hunyuan3D 2.0: Scaling Diffusion Models for High Resolution Textured 3D Assets Generation. arXiv:2501.12202 [cs.CV] 10•Yilin Liu, Pradeep Jayaraman, Chinthala Reddy, Xiang Xu, and Hooman Shayani Fig. 6.Point-cloud-to-B-rep reconstruction gallery.We showcase diverse reconstruction results from our deterministic DualBrep recon across various CAD model categ...
work page internal anchor Pith review Pith/arXiv arXiv
-
[14]
(c) Extract connected components on this stricter graph to ob- tain candidate sub-components
(b) Restrict the original face-adjacency graph to edges whose two incident faces are both eligible and currently belong to the same pass-1 component. (c) Extract connected components on this stricter graph to ob- tain candidate sub-components. (d) Discard any candidate sub-component whose size is smaller than𝑠 min. (e) For each split candidate component: ...
2020
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.