Joint Discovery of Object and Action Symbols through Effect Prediction for Robotic Manipulation Planning
Pith reviewed 2026-07-02 21:41 UTC · model grok-4.3
The pith
A binary bottleneck trained on effect predictions discovers joint object and action symbols for robotic manipulation planning.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
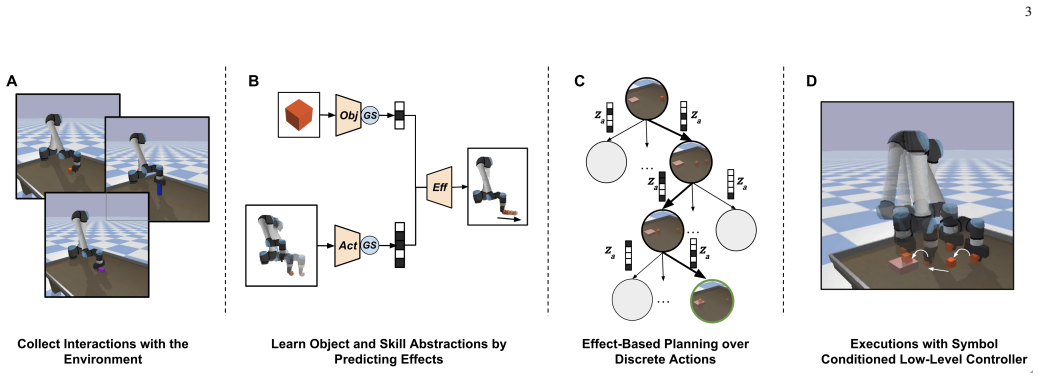
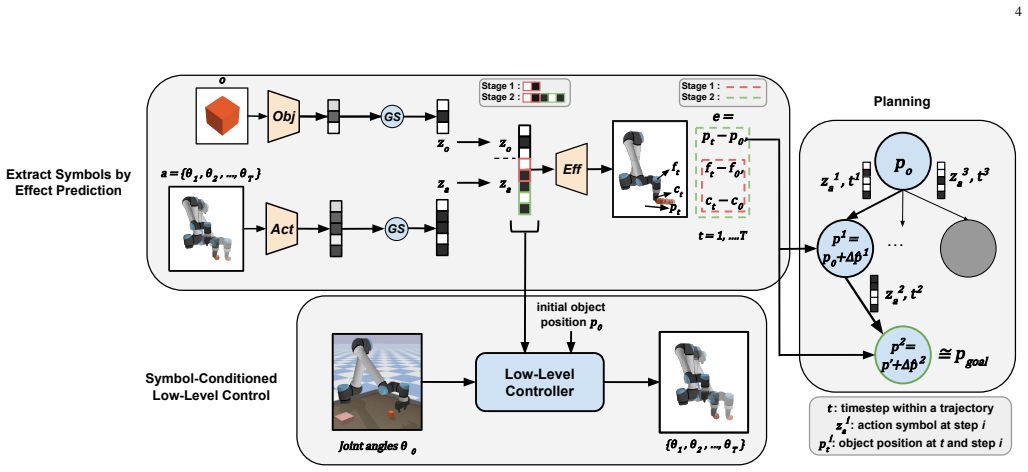
The central claim is that joint discovery of object and action symbols via a binary bottleneck optimized for multi-modal effect prediction from random interactions produces representations that support discrete planning with partial-action execution and enable few-shot generalization to novel objects by behavioral effect matching rather than visual similarity.
What carries the argument
Binary bottleneck layer that compresses sensorimotor interaction data into discrete binary codes representing object categories and manipulation primitives, trained end-to-end to forecast motion, contact, and force outcomes.
If this is right
- Discrete planning can use intermediate predicted effects to enable partial action executions for low-level control precision.
- Novel objects can be categorized in few shots by comparing observed interaction effects against the predicted effects of learned symbols.
- The effect-driven approach yields higher planning precision than state-of-the-art and visual-based methods on both seen and novel objects in repositioning and stacking tasks.
Where Pith is reading between the lines
- Effect-based symbols could allow robots to operate in settings where vision is unreliable, such as poor lighting or heavy occlusion.
- The same binary-code mechanism might scale to longer-horizon tasks if random data collection can be automated without task-specific action sets.
- If the codes reliably encode functional differences, they could support safer planning around unknown objects by forecasting effects before execution.
Load-bearing premise
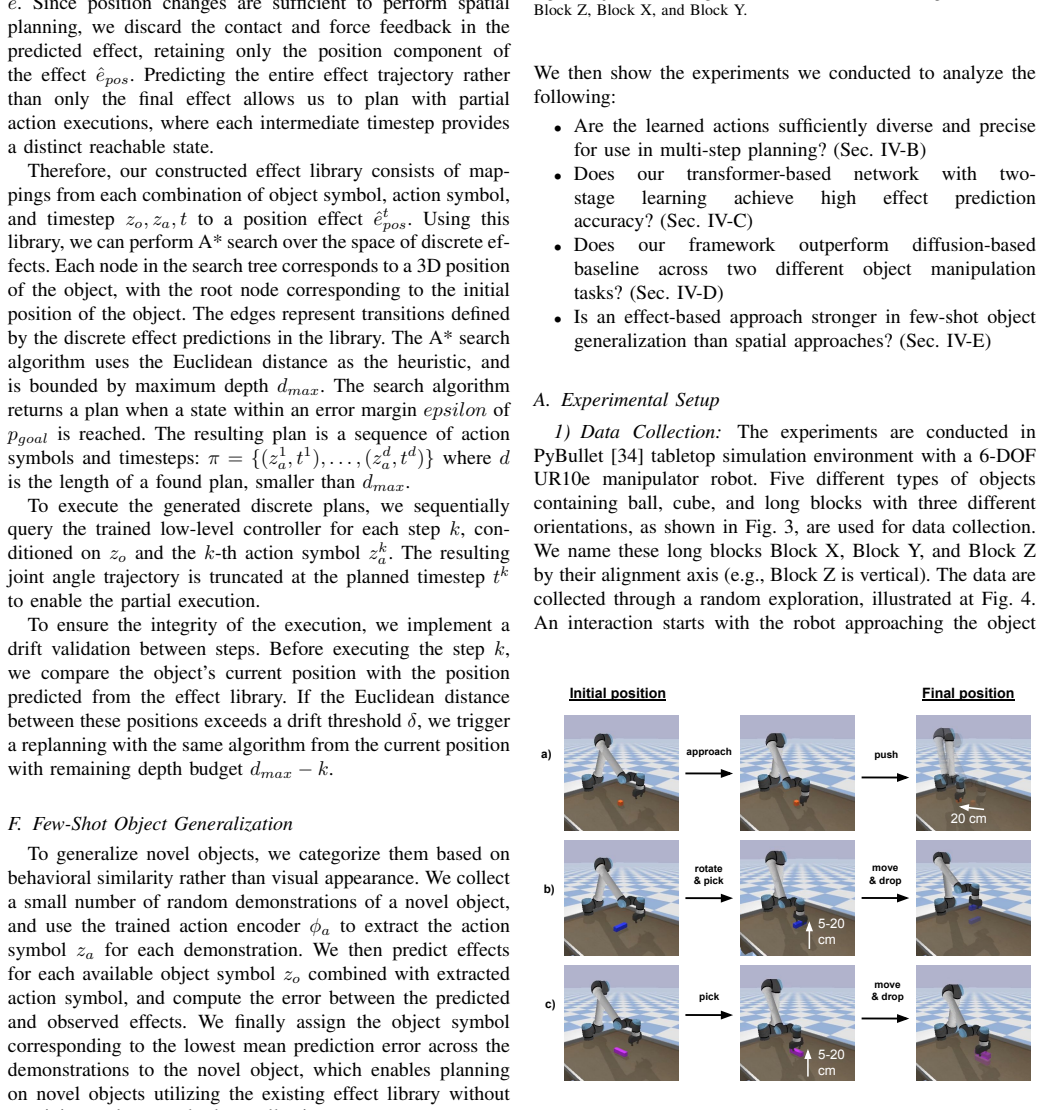
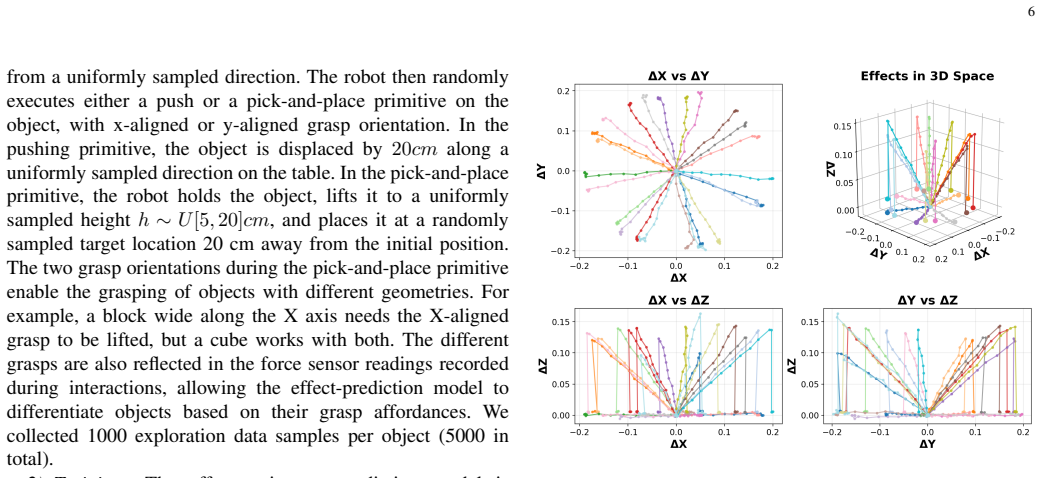
Random interaction data collected on a limited set of training objects produces binary codes that generalize to distinguish functionally different but visually similar novel objects while keeping predicted effect trajectories accurate enough for partial-action low-level control.
What would settle it
A trial in which planning precision on novel objects falls to or below the visual baseline, or in which two visually similar objects with different functions receive the same binary code after a small number of interactions.
Figures



read the original abstract
To perform complex manipulation planning, autonomous robots are required to abstract continuous, high-dimensional sensorimotor interactions into discrete object and action representations. Earlier work either categorized objects based on visual appearances, which fails to distinguish objects that appear similar but behave differently, or based on effects under interaction, but was limited to predefined actions. To address these limitations, we propose a model that jointly discovers high-level manipulation primitives and object categories through a binary bottleneck layer, trained to predict multi-modal outcomes, including object motion, contact, and force feedback, from random interaction data. Building on these discovered binary representations, we leverage a discrete planning method that uses intermediate steps in the predicted effect trajectory to enable partial action executions for precise low-level control. Additionally, we evaluate our framework's generalization capabilities on novel objects by assigning object categories through comparing a small number of interaction effects with the predicted effects of learned object symbols, enabling few-shot generalization based on behavior rather than visual similarity. We conduct experiments on tabletop repositioning and stacking tasks, and confirm that our effect-driven planning approach outperforms both a state-of-the-art method and a visual-based alternative in planning precision across seen and novel objects.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a framework that jointly discovers object and action symbols via a binary bottleneck layer trained end-to-end to predict multi-modal effects (object motion, contact, force) from random interaction data. These binary representations support discrete planning that uses intermediate predicted-effect steps for partial-action execution, plus few-shot novel-object categorization by comparing a small number of observed effects against the symbols' predicted effects. Experiments on tabletop repositioning and stacking tasks report that the effect-driven planner outperforms both a state-of-the-art method and a visual baseline in planning precision on both seen and novel objects.
Significance. If the reported precision gains and generalization hold under scrutiny, the work would supply a concrete route from raw sensorimotor data to behavior-grounded symbols that distinguish functionally distinct but visually similar objects, addressing a long-standing limitation in robotic manipulation planning. The use of predicted effect trajectories to enable partial low-level control is a distinctive technical contribution.
major comments (2)
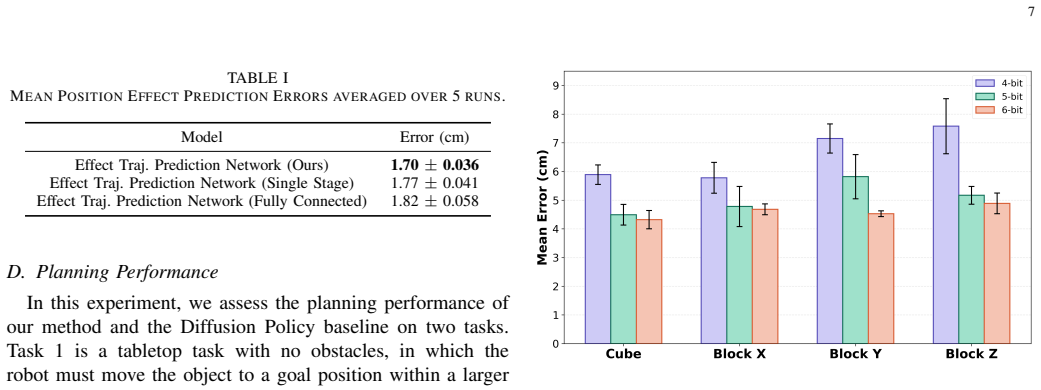
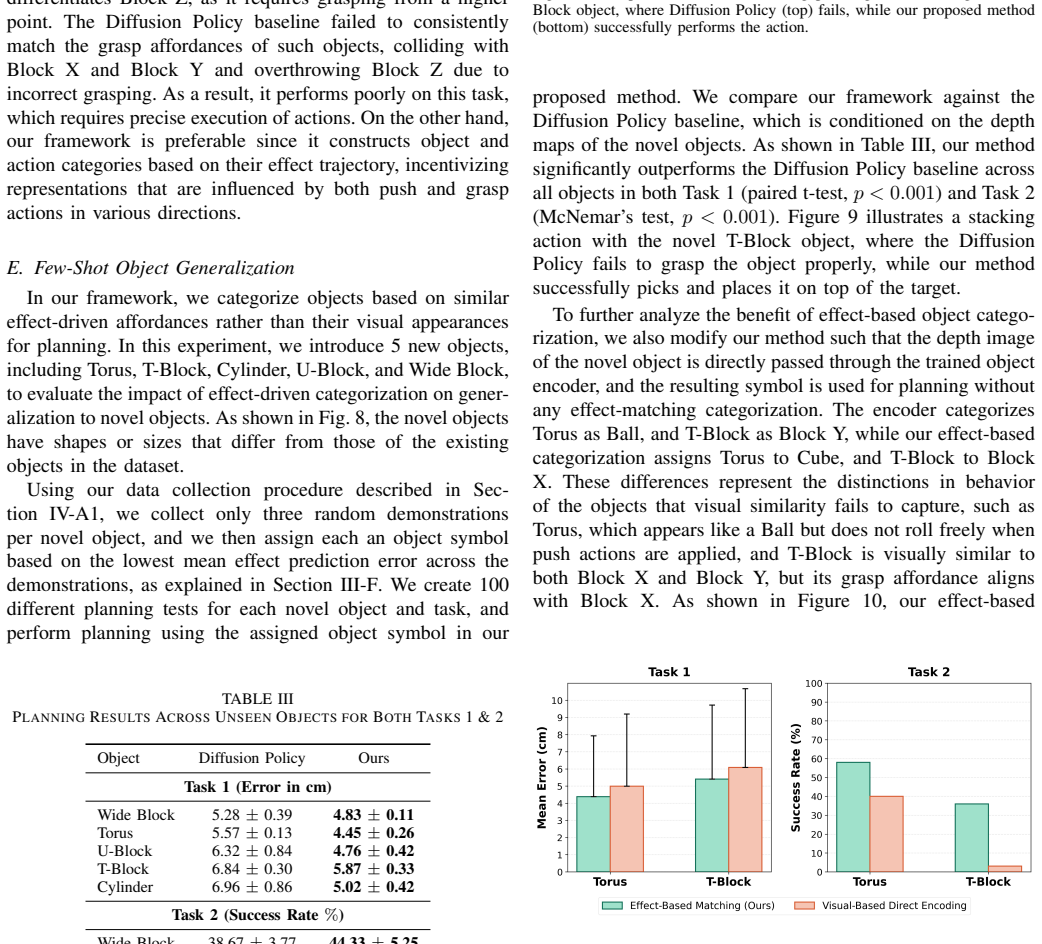
- [Experiments] Experiments section: the central claim that effect-based symbols generalize to novel objects rests on few-shot effect comparison, yet no quantitative bounds on prediction error (e.g., trajectory MSE or contact/force accuracy) are reported for out-of-distribution objects; without these, it is impossible to verify whether the observed planning-precision advantage is supported by accurate effect forecasts or by post-hoc selection.
- [Method] Method section (binary bottleneck description): the paper states that the binary codes are learned to predict multi-modal outcomes, but provides neither an ablation removing the bottleneck nor an analysis of code stability across random seeds; because the entire symbol-discovery and few-shot assignment pipeline depends on these codes, the absence of such controls leaves the load-bearing mechanism unverified.
minor comments (1)
- [Abstract] Abstract and introduction: the number of training objects, total interactions collected, and exact loss terms used to train the multi-modal predictor are not stated, making it difficult to assess data efficiency or reproducibility.
Simulated Author's Rebuttal
We thank the referee for the constructive comments on our manuscript. The feedback highlights key areas where additional evidence can strengthen the claims regarding generalization and the role of the binary bottleneck. We address each major comment below and commit to revisions that incorporate the requested analyses and metrics.
read point-by-point responses
-
Referee: [Experiments] Experiments section: the central claim that effect-based symbols generalize to novel objects rests on few-shot effect comparison, yet no quantitative bounds on prediction error (e.g., trajectory MSE or contact/force accuracy) are reported for out-of-distribution objects; without these, it is impossible to verify whether the observed planning-precision advantage is supported by accurate effect forecasts or by post-hoc selection.
Authors: We agree that reporting quantitative prediction error bounds for out-of-distribution objects is necessary to substantiate that the planning gains arise from accurate effect forecasts rather than other factors. In the revised manuscript, we will add trajectory MSE, contact accuracy, and force accuracy metrics specifically for novel objects in the experiments section, computed on the same interaction data used for few-shot categorization. revision: yes
-
Referee: [Method] Method section (binary bottleneck description): the paper states that the binary codes are learned to predict multi-modal outcomes, but provides neither an ablation removing the bottleneck nor an analysis of code stability across random seeds; because the entire symbol-discovery and few-shot assignment pipeline depends on these codes, the absence of such controls leaves the load-bearing mechanism unverified.
Authors: We acknowledge that an ablation study and stability analysis would better verify the binary bottleneck's contribution. In the revision, we will add an ablation comparing performance with and without the bottleneck layer, and report code stability (e.g., consistency of discovered symbols and downstream planning precision) across multiple random seeds in both the method and experiments sections. revision: yes
Circularity Check
No significant circularity detected
full rationale
The paper trains an end-to-end model with a binary bottleneck on random interaction data to predict multi-modal effects (motion, contact, force), then uses the resulting discrete symbols for planning and few-shot category assignment on novel objects via effect comparison. No quoted equations or steps reduce a claimed prediction or uniqueness result to a fitted parameter or self-citation by construction; the central performance claims rest on empirical outperformance against baselines rather than tautological redefinitions. The derivation chain is therefore self-contained.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Random interaction data collected on training objects contains sufficient information to learn binary codes that distinguish objects by behavior rather than appearance.
invented entities (1)
-
binary bottleneck layer
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Cognitive developmental robotics: A survey,
M. Asada, K. Hosoda, Y . Kuniyoshi, H. Ishiguro, T. Inui, Y . Yoshikawa, M. Ogino, and C. Yoshida, “Cognitive developmental robotics: A survey,”IEEE transactions on autonomous mental development, vol. 1, no. 1, pp. 12–34, 2009
2009
-
[2]
On the necessity of abstraction,
G. Konidaris, “On the necessity of abstraction,”Current opinion in behavioral sciences, vol. 29, pp. 1–7, 2019
2019
-
[3]
From skills to symbols: Learning symbolic representations for abstract high-level planning,
G. Konidaris, L. P. Kaelbling, and T. Lozano-Perez, “From skills to symbols: Learning symbolic representations for abstract high-level planning,”Journal of Artificial Intelligence Research, vol. 61, pp. 215– 289, 2018
2018
-
[4]
E. Ugur, A. Ahmetoglu, Y . Nagai, T. Taniguchi, M. Saveriano, and E. Oztop, “Neuro-symbolic robotics,” 2025, http://dx.doi.org/10.13140/ RG.2.2.25854.09283
-
[5]
Classical planning in deep latent space: Bridging the subsymbolic-symbolic boundary,
M. Asai and A. Fukunaga, “Classical planning in deep latent space: Bridging the subsymbolic-symbolic boundary,” inAAAI, vol. 32, no. 1, 2018
2018
-
[6]
Symbol grounding: a new look at an old idea,
R. Sun, “Symbol grounding: a new look at an old idea,”Philosophical Psychology, vol. 13, no. 2, pp. 149–172, 2000
2000
-
[7]
Development of knowledge of visual- tactual affordances of substance,
E. J. Gibson and A. S. Walker, “Development of knowledge of visual- tactual affordances of substance,”Child Development, vol. 55, no. 2, pp. 453–460, 1984
1984
-
[8]
Action alters shape categories,
L. B. Smith, “Action alters shape categories,”Cognitive Science, vol. 29, no. 4, pp. 665–679, 2005
2005
-
[9]
The theory of affordances,
J. J. Gibson, “The theory of affordances,” inPerceiving, Acting, and Knowing: Toward an Ecological Psychology, R. E. Shaw and J. Brans- ford, Eds. Hillsdale, NJ: Lawrence Erlbaum Associates, 1977, pp. 67–82
1977
-
[10]
Affordances in psychology, neuroscience, and robotics: A survey,
L. Jamone, E. Ugur, A. Cangelosi, L. Fadiga, A. Bernardino, J. Piater, and J. Santos-Victor, “Affordances in psychology, neuroscience, and robotics: A survey,”IEEE Transactions on Cognitive and Developmental Systems, vol. 10, no. 1, pp. 4–25, 2018
2018
-
[11]
Bottom-up learning of object categories, action effects and logical rules: From continuous manipulative exploration to symbolic planning,
E. Ugur and J. Piater, “Bottom-up learning of object categories, action effects and logical rules: From continuous manipulative exploration to symbolic planning,” in2015 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2015, pp. 2627–2633
2015
-
[12]
Deepsym: Deep symbol generation and rule learning for planning from unsu- pervised robot interaction,
A. Ahmetoglu, M. Y . Seker, J. Piater, E. Oztop, and E. Ugur, “Deepsym: Deep symbol generation and rule learning for planning from unsu- pervised robot interaction,”Journal of Artificial Intelligence Research, vol. 75, pp. 709–745, 2022
2022
-
[13]
Predictability-based curiosity- guided action symbol discovery,
B. Kilic, A. Ahmetoglu, and E. Ugur, “Predictability-based curiosity- guided action symbol discovery,” in2025 IEEE International Conference on Development and Learning (ICDL), 2025, pp. 1–6
2025
-
[14]
O 3Afford: One-shot 3d object-to- object affordance grounding for generalizable robotic manipulation,
T. Tian, X. Kang, and Y .-L. Kuo, “O 3Afford: One-shot 3d object-to- object affordance grounding for generalizable robotic manipulation,” in 9th Annual Conference on Robot Learning, 2025
2025
-
[15]
Where2explore: Few-shot affordance learning for unseen novel categories of articulated objects,
C. Ning, R. Wu, H. Lu, K. Mo, and H. Dong, “Where2explore: Few-shot affordance learning for unseen novel categories of articulated objects,” Advances in Neural Information Processing Systems, vol. 36, pp. 4585– 4596, 2023
2023
-
[16]
Diffusion policy: Visuomotor policy learning via action diffusion,
C. Chi, Z. Xu, S. Feng, E. Cousineau, Y . Du, B. Burchfiel, R. Tedrake, and S. Song, “Diffusion policy: Visuomotor policy learning via action diffusion,”The International Journal of Robotics Research, 2024
2024
-
[17]
Learning neural-symbolic descriptive planning models via cube-space priors: the voyage home (to strips),
M. Asai and C. Muise, “Learning neural-symbolic descriptive planning models via cube-space priors: the voyage home (to strips),” inProceed- ings of the Twenty-Ninth International Joint Conference on Artificial Intelligence, ser. IJCAI’20, 2021
2021
-
[18]
Classical planning in deep latent space,
M. Asai, H. Kajino, A. Fukunaga, and C. Muise, “Classical planning in deep latent space,”Journal of Artificial Intelligence Research, vol. 74, pp. 1599–1686, 2022
2022
-
[19]
Discovering predictive relational object symbols with symbolic attentive layers,
A. Ahmetoglu, B. Celik, E. Oztop, and E. Ugur, “Discovering predictive relational object symbols with symbolic attentive layers,”IEEE Robotics and Automation Letters, vol. 9, no. 2, pp. 1977–1984, 2024
1977
-
[20]
Symbolic manipulation planning with discovered object and relational predicates,
A. Ahmetoglu, E. Oztop, and E. Ugur, “Symbolic manipulation planning with discovered object and relational predicates,”IEEE Robotics and Automation Letters, 2025
2025
-
[21]
Object and relation centric representations for push effect prediction,
A. E. Tekden, A. Erdem, E. Erdem, T. Asfour, and E. Ugur, “Object and relation centric representations for push effect prediction,”Robotics and Autonomous Systems, vol. 174, p. 104632, 2024
2024
-
[22]
Multi-step planning with learned effects of partial action executions,
H. Aktas, U. Bozdogan, and E. Ugur, “Multi-step planning with learned effects of partial action executions,”Advanced Robotics, vol. 38, no. 8, pp. 562–576, 2024
2024
-
[23]
Search-based task planning with learned skill effect models for lifelong robotic manipulation,
J. Liang, M. Sharma, A. LaGrassa, S. Vats, S. Saxena, and O. Kroemer, “Search-based task planning with learned skill effect models for lifelong robotic manipulation,” in2022 International Conference on Robotics and Automation (ICRA). IEEE, 2022, pp. 6351–6357
2022
-
[24]
Planning in learned latent action spaces for generalizable legged locomotion,
T. Li, R. Calandra, D. Pathak, Y . Tian, F. Meier, and A. Rai, “Planning in learned latent action spaces for generalizable legged locomotion,”IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 2682–2689, 2021
2021
-
[25]
Multiobject graph affordance network: Goal- oriented planning through learned compound object affordances,
T. Girgin and E. U ˘gur, “Multiobject graph affordance network: Goal- oriented planning through learned compound object affordances,”IEEE Transactions on Cognitive and Developmental Systems, vol. 17, no. 4, pp. 847–858, 2024
2024
-
[26]
Few-shot neuro- symbolic imitation learning for long-horizon planning and acting,
P. Lorang, H. Lu, J. Huemer, P. Zips, and M. Scheutz, “Few-shot neuro- symbolic imitation learning for long-horizon planning and acting,” in 9th Annual Conference on Robot Learning, 2025. 10
2025
-
[27]
Adaafford: Learning to adapt manipulation affordance for 3d articulated objects via few-shot interactions,
Y . Wang, R. Wu, K. Mo, J. Ke, Q. Fan, L. J. Guibas, and H. Dong, “Adaafford: Learning to adapt manipulation affordance for 3d articulated objects via few-shot interactions,” inEuropean conference on computer vision. Springer, 2022, pp. 90–107
2022
-
[28]
Attention is all you need,
A. Vaswani, N. Shazeer, N. Parmar, J. Uszkoreit, L. Jones, A. N. Gomez, Ł. Kaiser, and I. Polosukhin, “Attention is all you need,”Advances in neural information processing systems, vol. 30, 2017
2017
-
[29]
The Concrete Distribution: A Continuous Relaxation of Discrete Random Variables
C. J. Maddison, A. Mnih, and Y . W. Teh, “The concrete distribution: A continuous relaxation of discrete random variables,”arXiv preprint arXiv:1611.00712, 2016
work page internal anchor Pith review Pith/arXiv arXiv 2016
-
[30]
Categorical Reparameterization with Gumbel-Softmax
E. Jang, S. Gu, and B. Poole, “Categorical reparameterization with gumbel-softmax,”arXiv preprint arXiv:1611.01144, 2016
work page internal anchor Pith review Pith/arXiv arXiv 2016
-
[31]
Auto-encoding variational bayes,
D. P. Kingma, M. Wellinget al., “Auto-encoding variational bayes,” 2013
2013
-
[32]
Infant grasp learning: a computational model,
E. Oztop, N. S. Bradley, and M. A. Arbib, “Infant grasp learning: a computational model,”Experimental Brain Research, vol. 158, no. 4, pp. 480–503, 2004
2004
-
[33]
Conditional neural movement primitives,
M. Y . Seker, M. Imre, J. Piater, and E. Ugur, “Conditional neural movement primitives,” inProceedings of Robotics: Science and Systems, FreiburgimBreisgau, Germany, June 2019
2019
-
[34]
Pybullet, a python module for physics simulation for games, robotics and machine learning,
E. Coumans and Y . Bai, “Pybullet, a python module for physics simulation for games, robotics and machine learning,” http://pybullet.org, 2016–2021
2016
-
[35]
Adam: A Method for Stochastic Optimization
D. P. Kingma and J. Ba, “Adam: A method for stochastic optimization,” arXiv preprint arXiv:1412.6980, 2014
work page internal anchor Pith review Pith/arXiv arXiv 2014
-
[36]
Note on the sampling error of the difference between correlated proportions or percentages,
Q. McNemar, “Note on the sampling error of the difference between correlated proportions or percentages,”Psychometrika, vol. 12, no. 2, pp. 153–157, 1947
1947
-
[37]
PDDL—the planning domain definition language,
D. McDermott, M. Ghallab, A. Howe, C. Knoblock, A. Ram, M. Veloso, D. Weld, and D. Wilkins, “PDDL—the planning domain definition language,” Yale Center for Computational Vision and Control, Technical Report TR-98-003, 1998
1998
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.