Solution space path planning for supporting en-route air traffic control
Pith reviewed 2026-07-02 19:29 UTC · model grok-4.3
The pith
A solution-space algorithm using vertex search nodes and zone-based conflict detection generates conflict-free paths for en-route air traffic control in milliseconds.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
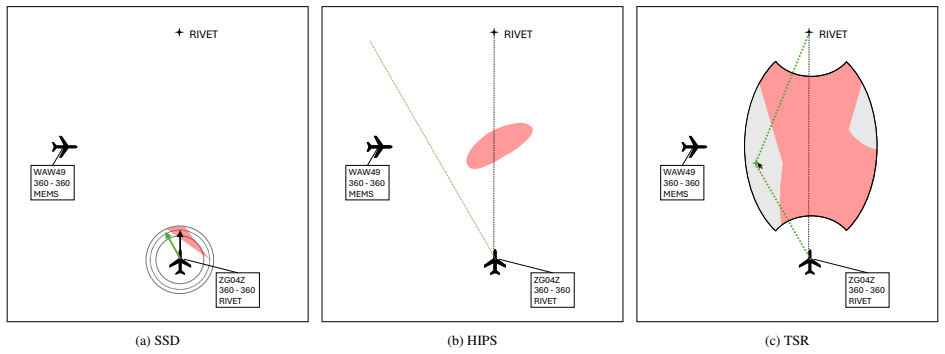
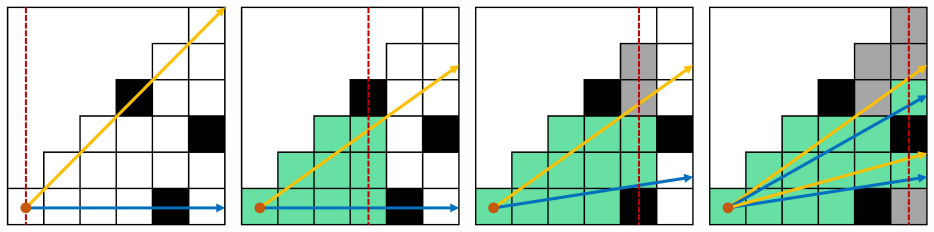
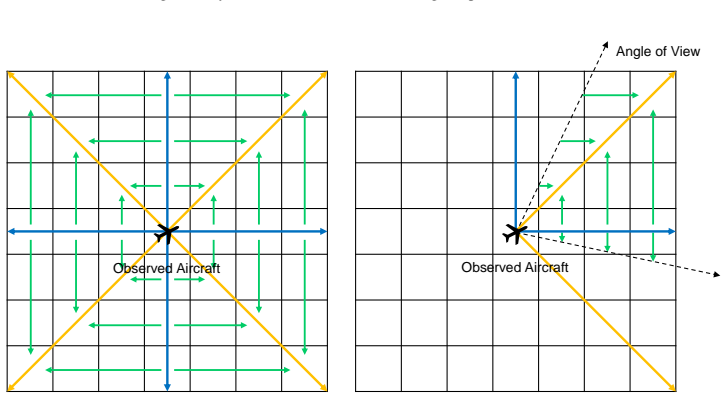
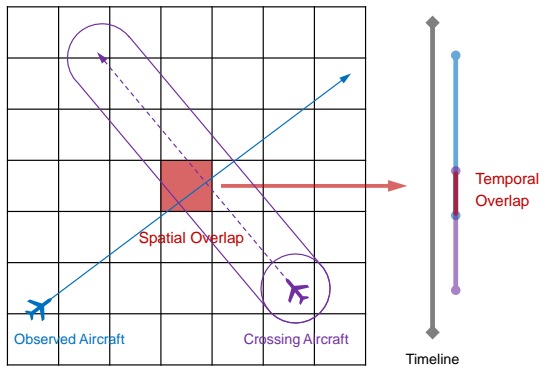
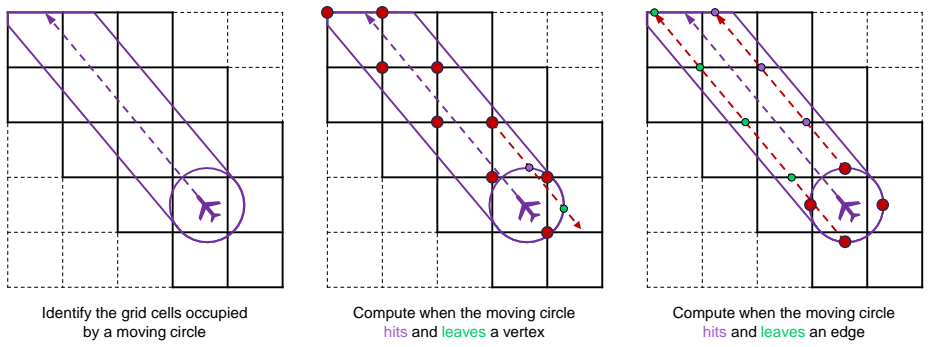
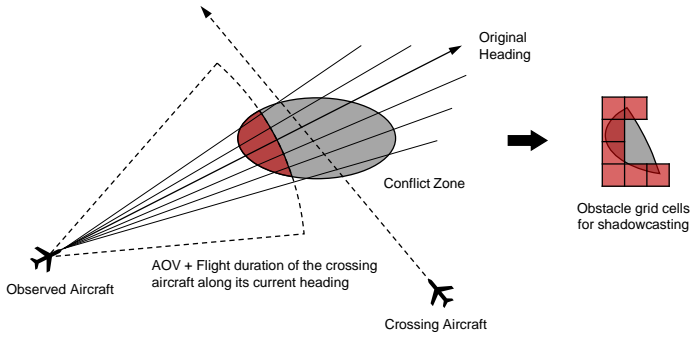
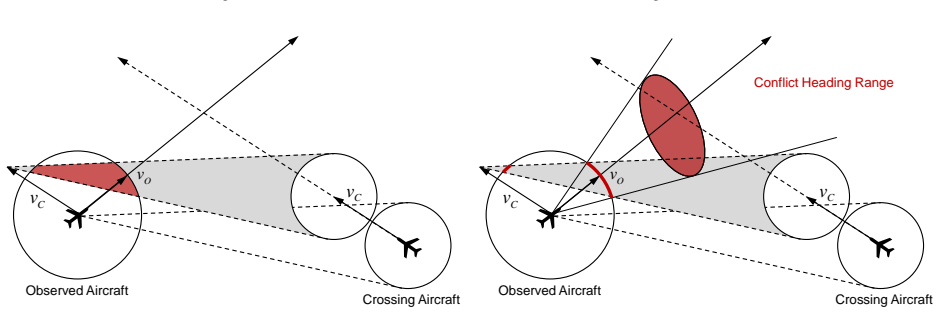
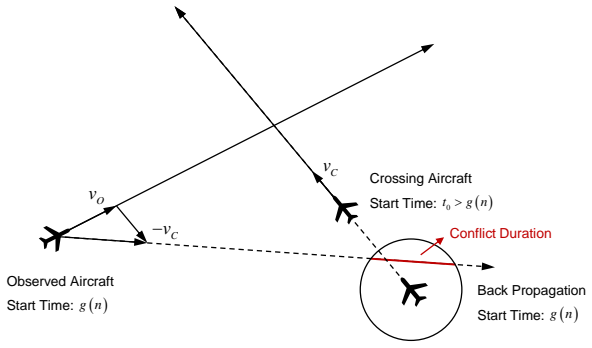
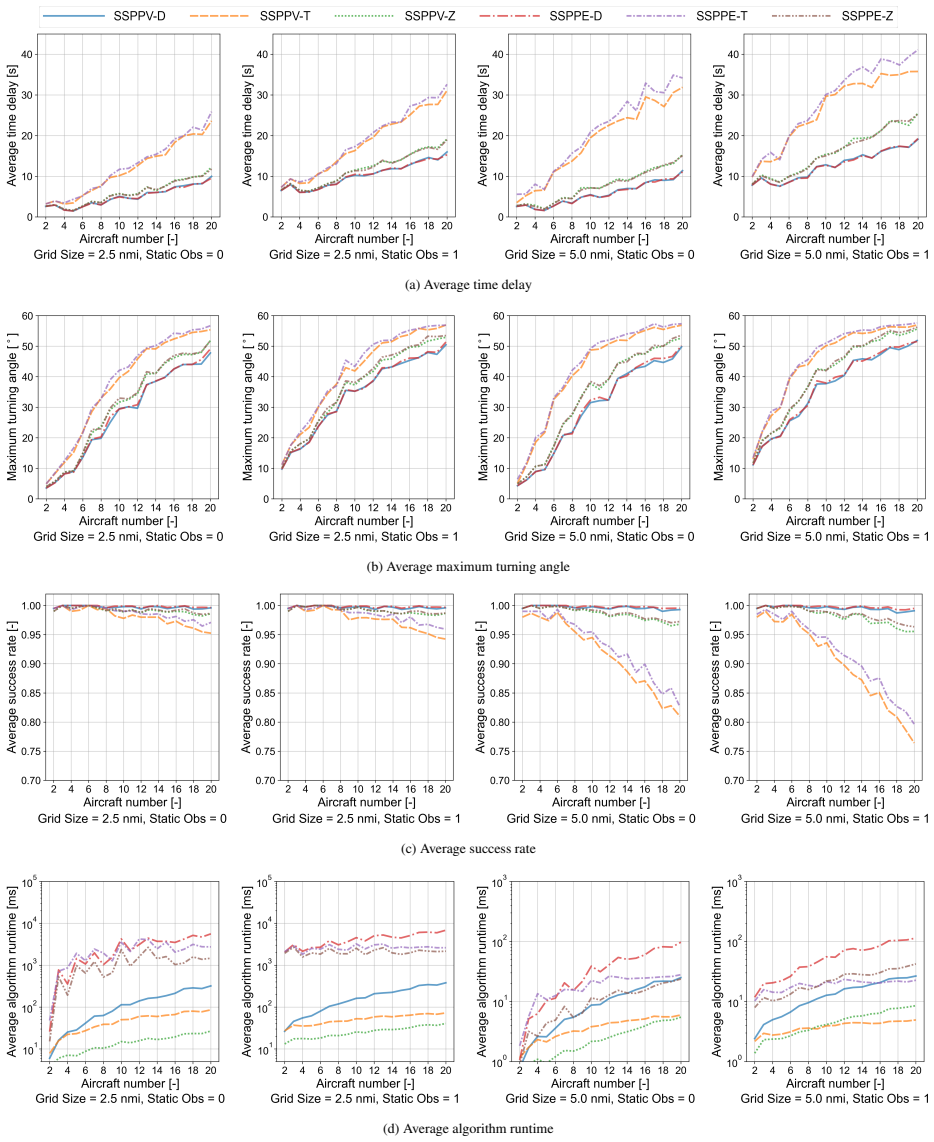
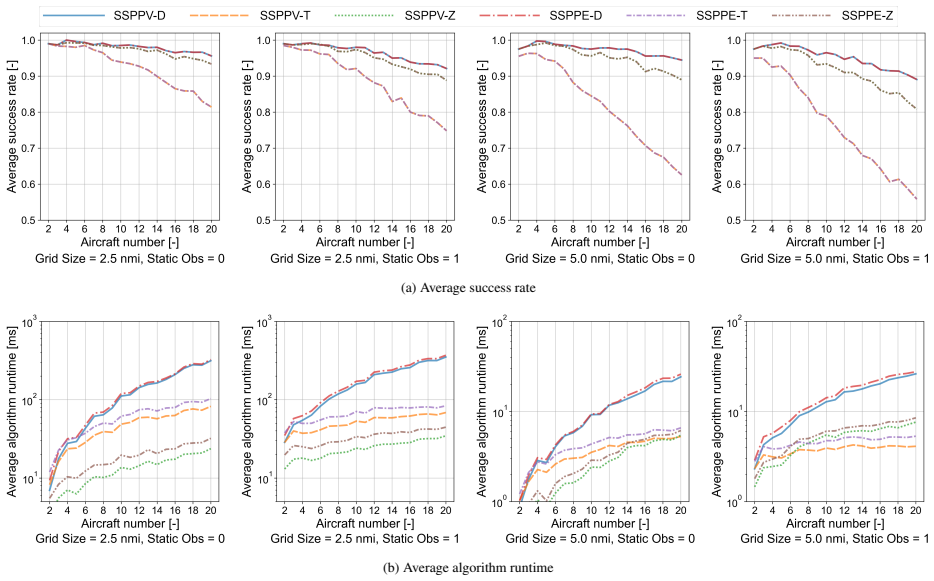
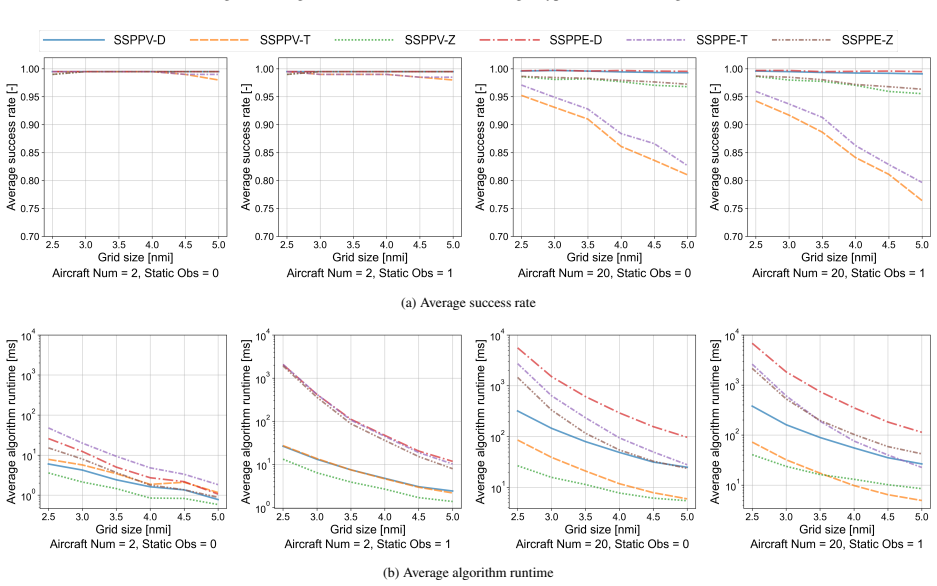
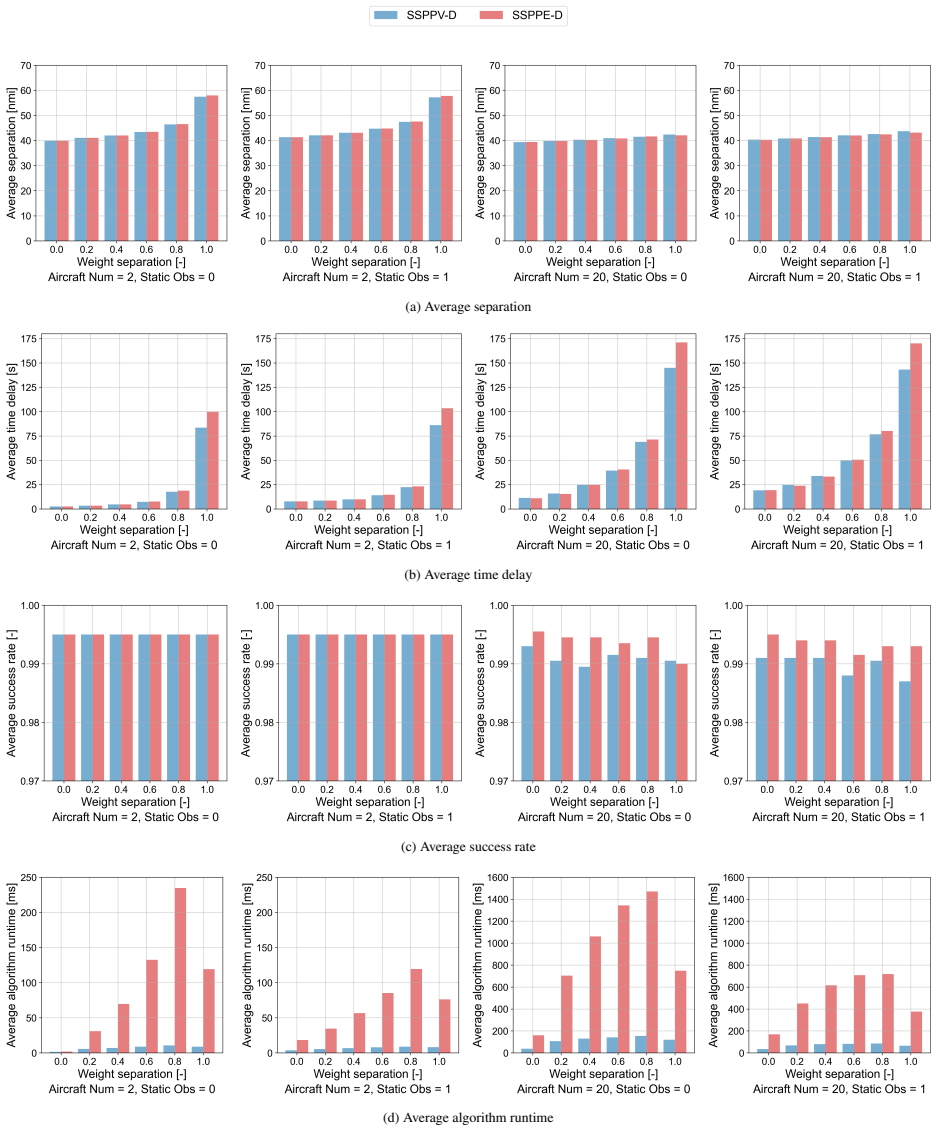
The algorithm integrates distance-based, time-interval-based, and zone-based conflict detection within a solution-space path planning framework. Vertex-based (SSPPV) and edge-based (SSPPE) search nodes are introduced to generate conflict-free paths that respect separation standards, maneuverability limits, and waypoint minimization. In scenarios modeled on the Delta sector of the Maastricht Upper Area Control Centre using a 5 nmi grid, SSPPV with zone-based detection computes paths averaging 3.69 milliseconds.
What carries the argument
Solution-space path planning (SSPP) framework that exposes all feasible safe actions and accommodates shifting optimization goals through intent-based conflict detection.
If this is right
- SSPPV with zone-based detection achieves the best performance in computational speed.
- Average computation time is 3.69 ms in operational-relevant scenarios.
- The method supports interpretability by showing all feasible paths.
- It handles operational constraints like separation standards and routing practicality.
Where Pith is reading between the lines
- Controllers could use the exposed solution space to quickly evaluate options under time pressure.
- Integration with existing displays might improve adoption of automated path suggestions.
- Extending the grid resolution or adding more dynamic elements could test robustness beyond the fixed 5 nmi setup.
Load-bearing premise
The simulated scenarios based on the MUAC Delta sector with a fixed 5 nmi grid and the three conflict detection methods represent the full range of operational constraints and dynamic conditions in real en-route airspace.
What would settle it
Running the algorithm on real-time traffic data from the Maastricht Upper Area Control Centre where it produces a path that violates separation minima under actual controller interventions.
Figures
read the original abstract
As technology advances, many path-planning algorithms have been proposed for Air Traffic Management, yet their operational adoption in tactical control remains limited, revealing a misalignment between algorithmic design priorities and air traffic controllers' needs. This underscores the need for decision-support solutions that are inherently interpretable, computationally efficient, and explicitly designed for human use. Focusing on this design challenge, this study develops a conflict-free path-planning algorithm for en-route Air Traffic Control (ATC) designed to be compatible with two guiding considerations: (1) the interpretability and flexibility offered by solution-space displays, which motivate constructing an algorithm that exposes all feasible safe actions and accommodates shifting optimization goals; and (2) the decision logic controllers naturally apply when enforcing operational constraints, such as separation standards, maneuverability limits, waypoint minimization, and routing practicality. Centered on these principles, the algorithm integrates three intent-based conflict detection methods -- distance-based, time-interval-based, and zone-based -- within a solution-space framework to identify conflict-free paths in computationally efficient ways. Additionally, vertex-based and edge-based search nodes are proposed for solution space path planning (SSPP), resulting in two variants -- SSPPV and SSPPE, respectively, which are evaluated in terms of computational speed and solution quality. Empirical results show that SSPPV paired with zone-based conflict detection achieves the best performance, computing paths in 3.69 ms on average in operational-relevant scenarios based on the Delta sector of the Maastricht Upper Area Control Centre (MUAC) using a 5 nmi grid.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper develops a solution-space path planning (SSPP) algorithm for en-route ATC that integrates three intent-based conflict detectors (distance-based, time-interval-based, zone-based) inside a framework exposing feasible actions. It introduces vertex-based (SSPPV) and edge-based (SSPPE) search variants and reports that SSPPV paired with zone-based detection yields the best speed-quality trade-off, averaging 3.69 ms per path on simulated MUAC Delta-sector traffic using a fixed 5 nmi grid.
Significance. If the performance claims are substantiated with proper controls, the work could advance interpretable, controller-aligned decision support tools that explicitly respect separation standards, maneuverability limits, and waypoint minimization. The emphasis on solution-space displays and alignment with operational decision logic is a constructive contribution to ATM path-planning literature.
major comments (2)
- [Experimental results] Experimental results section (and abstract): the headline claim that SSPPV + zone-based detection 'achieves the best performance' at 3.69 ms average is presented without any description of baselines, solution-quality metric definition, statistical tests, error bars, or scenario-generation rules. This absence makes the central empirical assertion unverifiable from the reported text.
- [Evaluation setup] Scenario description and evaluation setup: all reported timings and quality figures rest on a single fixed 5 nmi discretization of the MUAC Delta sector with static intent assumptions. No analysis is given of how this grid choice or static-intent model affects missed conflicts, re-planning frequency, or non-grid-aligned maneuvers, leaving the operational relevance of the 3.69 ms figure dependent on untested scenario assumptions.
Simulated Author's Rebuttal
We thank the referee for the constructive comments highlighting the need for greater transparency in our experimental claims and setup. We agree that the current manuscript requires expansion to make the performance assertions verifiable and to better justify the evaluation assumptions. Below we respond point-by-point to the major comments and indicate the revisions we will undertake.
read point-by-point responses
-
Referee: [Experimental results] Experimental results section (and abstract): the headline claim that SSPPV + zone-based detection 'achieves the best performance' at 3.69 ms average is presented without any description of baselines, solution-quality metric definition, statistical tests, error bars, or scenario-generation rules. This absence makes the central empirical assertion unverifiable from the reported text.
Authors: We accept this observation. The manuscript will be revised to include explicit baseline comparisons (A* with Euclidean heuristic and a sampling-based RRT variant adapted to the solution-space constraints), a precise definition of solution quality (primary: number of waypoints; secondary: total path length, both subject to zero-conflict verification), mean and standard-deviation statistics over 500 Monte-Carlo runs with error bars, and a description of scenario generation drawn from 24 hours of MUAC Delta traffic logs with randomized but realistic intent vectors. The abstract will be updated to reflect these additions. These changes will be incorporated in the next version. revision: yes
-
Referee: [Evaluation setup] Scenario description and evaluation setup: all reported timings and quality figures rest on a single fixed 5 nmi discretization of the MUAC Delta sector with static intent assumptions. No analysis is given of how this grid choice or static-intent model affects missed conflicts, re-planning frequency, or non-grid-aligned maneuvers, leaving the operational relevance of the 3.69 ms figure dependent on untested scenario assumptions.
Authors: We agree that a single-grid, static-intent evaluation limits demonstrated robustness. The revised manuscript will add a sensitivity study varying grid resolution (3 nmi, 5 nmi, 7 nmi) and reporting effects on missed conflicts and re-planning frequency under the same traffic sample. We will also include a short discussion of the static-intent assumption, noting that it matches the tactical horizon considered and that dynamic re-planning is triggered on intent updates; a quantitative assessment of non-grid-aligned maneuvers will be added by measuring the fraction of solutions that require post-processing interpolation. Full dynamic-intent Monte-Carlo experiments are beyond the scope of the present work but will be flagged as future research. revision: partial
Circularity Check
No significant circularity; empirical evaluation on external scenarios
full rationale
The paper proposes SSPPV/SSPPE variants integrating three intent-based conflict detectors within a solution-space framework, motivated by operational interpretability needs, then reports direct runtime and quality measurements (e.g., 3.69 ms average) on simulated MUAC Delta sector scenarios using a fixed 5 nmi grid. No load-bearing step reduces a claimed result to a fitted parameter, self-citation chain, or definitional equivalence; the performance figures are measured outputs on independently constructed test cases rather than predictions derived from the algorithm's own inputs. This matches the default non-circular case of an algorithmic proposal with external empirical validation.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
SESAR, Automation in Air Tra ffic Management, Technical Report, SESAR Joint Undertaking, 2020
2020
-
[2]
URL: https://www.sesarju.eu/masterplan
SESAR, European ATM master plan, Technical Report, SESAR Joint Undertaking, 2025. URL: https://www.sesarju.eu/masterplan
2025
-
[3]
URL: https://www.easa.europa.eu/en/downloads/137919/en
EASA, Artificial Intelligence Roadmap 2.0: A human-centric approach to AI in aviation, Technical Report, European Union Aviation Safety Agency, 2023. URL: https://www.easa.europa.eu/en/downloads/137919/en
2023
-
[4]
Y . Zou, C. Borst, Investigating transparency needs for supervising unmanned air tra ffic management systems, in: 13th SESAR Innovation Days, 2023, pp. 1–9
2023
-
[5]
M. R. Endsley, Supporting human-AI teams: Transparency, explainability, and situation awareness, Computers in Human Behavior 140 (2023) 107574
2023
-
[6]
Westin, C
C. Westin, C. Borst, B. Hilburn, Strategic conformance: Overcoming acceptance issues of decision aiding automation?, IEEE Transactions on Human-Machine Systems 46 (2015) 41–52
2015
-
[7]
A. Barredo Arrieta, N. D ´ıaz-Rodr´ıguez, J. Del Ser, A. Bennetot, S. Tabik, A. Barbado, S. Garcia, S. Gil-Lopez, D. Molina, R. Benjamins, R. Chatila, F. Herrera, Explainable artificial intelligence (XAI): Concepts, taxonomies, opportunities and challenges toward responsible AI, Information Fusion 58 (2020) 82–115. doi:https://doi.org/10.1016/j.inffus.2019.12.012
-
[8]
D. Gunning, D. Aha, DARPA’s explainable artificial intelligence (XAI) program, AI Magazine 40 (2019) 44–58. doi: 10.1609/aimag. v40i2.2850
-
[9]
Y . Zou, C. Borst, Algorithmic transparency in path planning: A visual approach to enhancing human understanding, International Journal of Human-Computer Studies 203 (2025) 103573. doi:10.1016/j.ijhcs.2025.103573
-
[10]
A. Bhat, A. Raychowdhury, Non-uniform interpolation in integrated gradients for low-latency explainable-ai, in: 2023 IEEE International Symposium on Circuits and Systems (ISCAS), IEEE, 2023, pp. 1–5. 34
2023
-
[11]
Rasmussen, K
J. Rasmussen, K. J. Vicente, Coping with human errors through system design: implications for ecological interface design, International Journal of Man-machine Studies 31 (1989) 517–534
1989
-
[12]
K. J. Vicente, J. Rasmussen, The ecology of human-machine systems ii: Mediating direct-perception in complex work domains, Ecological Psychology 2 (1990) 207–249
1990
-
[13]
K. J. Vicente, J. Rasmussen, Ecological interface design: Theoretical foundations, IEEE Transactions on Systems, Man, and Cybernetics 22 (1992) 589–606
1992
-
[14]
M. M. van Paassen, C. Borst, J. Ellerbroek, M. Mulder, J. M. Flach, Ecological interface design for vehicle locomotion control, IEEE Transactions on Human-Machine Systems 48 (2018) 541–555
2018
-
[15]
Klomp, R
R. Klomp, R. Riegman, C. Borst, M. Mulder, M. Van Paassen, Solution space concept: Human-machine interface for 4D trajectory man- agement, in: Proceedings of the Thirteenth USA /Europe Air Traffic Management Research and Development Seminar (ATM2019), Vienna, Austria, 2019, pp. 17–21
2019
-
[16]
C. Borst, J. M. Flach, J. Ellerbroek, Beyond ecological interface design: Lessons from concerns and misconceptions, IEEE Transactions on Human-Machine Systems 45 (2015) 164–175. doi:10.1109/THMS.2014.2364984
-
[17]
Mulder, C
M. Mulder, C. Borst, M. M. van Paassen, Improving operator situation awareness through ecological interfaces: Lessons from aviation, in: 1st International Conference on Computer-Human Interaction Research and Applications, CHIRA 2017, Springer, 2019, pp. 20–44
2017
-
[18]
Westin, C
C. Westin, C. Borst, E. Kampen, T. M. Nunes, S. Boonsong, B. Hilburn, M. Cocchioni, S. Bonelli, Personalized and transparent AI support for ATC conflict detection and resolution: an empirical study, Proceedings of the 12th SESAR Innovation Days, Budapest, Hungary (2022) 5–8
2022
-
[19]
W. Dai, B. Pang, K. H. Low, Conflict-free four-dimensional path planning for urban air mobility considering airspace occupancy, Aerospace Science and Technology 119 (2021) 107154
2021
-
[20]
Y . Chen, M. Hu, L. Yang, Autonomous planning of optimal four-dimensional trajectory for real-time en-route airspace operation with solution space visualisation, Transportation Research Part C: Emerging Technologies 140 (2022) 103701
2022
-
[21]
Y . Chen, Y . Xu, L. Yang, M. Hu, In-flight fast conflict-free trajectory re-planning considering UA V position uncertainty and energy consump- tion, Transportation Research Part C: Emerging Technologies 171 (2025) 104988
2025
-
[22]
Bergstr ¨om, FOV using recursive shadowcasting, http://www.roguebasin.com/index.php?title=FOV_using_recursive_ shadowcasting, 2001
B. Bergstr ¨om, FOV using recursive shadowcasting, http://www.roguebasin.com/index.php?title=FOV_using_recursive_ shadowcasting, 2001. Accessed on Aug. 2nd, 2025
2001
-
[23]
Milazzo, Roguelike vision algorithms, https://www.adammil.net/blog/v125_Roguelike_Vision_Algorithms.html, 2014
A. Milazzo, Roguelike vision algorithms, https://www.adammil.net/blog/v125_Roguelike_Vision_Algorithms.html, 2014. Ac- cessed on Aug. 2nd, 2025
2014
-
[24]
Daniel, A
K. Daniel, A. Nash, S. Koenig, A. Felner, Theta*: Any-angle path planning on grids, J. Artif. Int. Res. 39 (2010) 533–579
2010
-
[25]
Yakovlev, A
K. Yakovlev, A. Andreychuk, Towards time-optimal any-angle path planning with dynamic obstacles, in: Proceedings of the International Conference on Automated Planning and Scheduling, volume 31, 2021, pp. 405–414
2021
-
[26]
P. E. Hart, N. J. Nilsson, B. Raphael, A formal basis for the heuristic determination of minimum cost paths, IEEE Transactions on Systems Science and Cybernetics 4 (1968) 100–107. doi:10.1109/TSSC.1968.300136
-
[27]
Davoodi, Bi-objective path planning using deterministic algorithms, Robotics and Autonomous Systems 93 (2017) 105–115
M. Davoodi, Bi-objective path planning using deterministic algorithms, Robotics and Autonomous Systems 93 (2017) 105–115
2017
-
[28]
D. T. ¨Ozt¨urk, M. K ¨oksalan, Biobjective route planning of an unmanned air vehicle in continuous space, Transportation Research Part B: Methodological 168 (2023) 151–169
2023
-
[29]
URL: https: //www.eurocontrol.int/article/lord-adds-speed-and-flexibility-decisions-maastricht-controllers , accessed on Jun
EUROCONTROL, LORD adds speed and flexibility to decisions for Maastricht controllers, Skyway (2024) 54–56. URL: https: //www.eurocontrol.int/article/lord-adds-speed-and-flexibility-decisions-maastricht-controllers , accessed on Jun. 18th, 2025
2024
-
[30]
W. Lyu, C. Borst, M. R. van Paassen, M. Mulder, How do visualization choices a ffect human decision-making? a case study in air tra ffic control, in: 2025 IEEE International Conference on Systems, Man, and Cybernetics (SMC), IEEE, 2025, pp. 7109–7114. doi: 10.1109/ SMC58881.2025.11343058
-
[31]
P. Fiorini, Z. Shiller, Motion planning in dynamic environments using velocity obstacles, The International Journal of Robotics Research 17 35 (1998) 760–772. doi:10.1177/027836499801700706
-
[32]
Wilkie, J
D. Wilkie, J. Van Den Berg, D. Manocha, Generalized velocity obstacles, in: 2009 IEEE /RSJ International Conference on Intelligent Robots and Systems, IEEE, 2009, pp. 5573–5578
2009
-
[33]
Vesentini, R
F. Vesentini, R. Muradore, P. Fiorini, A survey on velocity obstacle paradigm, Robotics and Autonomous Systems 174 (2024) 104645
2024
-
[34]
G. A. M. Velasco, C. Borst, M. M. van Paassen, M. Mulder, Solution space decision support for reducing controller workload in route merging task, Journal of Aircraft 58 (2021) 125–137. doi:10.2514/1.C035852
-
[35]
C. Borst, R. M. Visser, M. M. van Paassen, M. Mulder, Exploring short-term training e ffects of ecological interfaces: A case study in air traffic control, IEEE Transactions on Human-Machine Systems 49 (2019) 623–632. doi:10.1109/THMS.2019.2919742
-
[36]
C. Borst, V . A. Bijsterbosch, M. M. van Paassen, M. Mulder, Ecological interface design: supporting fault diagnosis of automated advice in a supervisory air traffic control task, Cognition, Technology & Work 19 (2017) 545–560. doi:10.1007/s10111-017-0438-y
-
[37]
Mecki ff, P
C. Mecki ff, P. Gibbs, Phare highly interactive problem solver, EEC Re (1994)
1994
-
[38]
B. J. van Marwijk, C. Borst, M. Mulder, M. Mulder, M. M. van Paassen, Supporting 4D trajectory revisions on the flight deck: Design of a human-machine interface, The International Journal of Aviation Psychology 21 (2011) 35–61
2011
-
[39]
Van Paassen, C
M. Van Paassen, C. Borst, R. Klomp, M. Mulder, P. van Leeuwen, M. Mooij, Designing for shared cognition in air tra ffic management, Journal of Aerospace Operations 2 (2013) 39–51
2013
-
[40]
Klomp, C
R. Klomp, C. Borst, R. van Paassen, M. Mulder, Expertise level, control strategies, and robustness in future air traffic control decision aiding, IEEE Transactions on Human-Machine Systems 46 (2015) 255–266
2015
-
[41]
S. B. Van Dam, M. Mulder, M. Van Paassen, Ecological interface design of a tactical airborne separation assistance tool, IEEE Transactions on Systems, Man, and Cybernetics-Part A: Systems and Humans 38 (2008) 1221–1233
2008
-
[42]
SESAR, AI in ATM: transparency, explainability, conformance, situation awareness and trust, Technical Report, SESAR Joint Undertaking,
-
[43]
URL: http://mahaloproject.eu/wp-content/uploads/2022/12/Sesar-white-paper.pdf
2022
-
[44]
Siegwart, I
R. Siegwart, I. R. Nourbakhsh, D. Scaramuzza, Introduction to autonomous mobile robots, MIT press, 2011
2011
-
[45]
B. Shen, M. A. Cheema, D. D. Harabor, P. J. Stuckey, Fast optimal and bounded suboptimal euclidean pathfinding, Artificial Intelligence 302 (2022) 103624
2022
-
[46]
J. Li, C. Yu, Z. Zhang, Z. Sheng, Z. Yan, X. Wu, W. Zhou, Y . Xie, J. Huang, Improved a-star path planning algorithm in obstacle avoidance for the fixed-wing aircraft, Electronics 12 (2023) 5047
2023
-
[47]
Almozel, E
A. Almozel, E. M. Feron, S. I. Saber, C. Cloiseau, K. Vanderventer, Safe trajectory planning for safety critical drone delivery, in: AIAA Aviation 2023 Forum, 2023, p. 3547
2023
-
[48]
P. Yap, N. Burch, R. Holte, J. Schae ffer, Block A*: Database-driven search with applications in any-angle path-planning, Proceedings of the AAAI Conference on Artificial Intelligence 25 (2011) 120–125. doi:10.1609/aaai.v25i1.7813
-
[49]
Harabor, A
D. Harabor, A. Grastien, D. ¨Oz, V . Aksakalli, Optimal any-angle pathfinding in practice, J. Artif. Int. Res. 56 (2016) 89–118
2016
-
[50]
Rivera, C
N. Rivera, C. Hern ´andez, N. Hormaz´abal, J. A. Baier, The 2k neighborhoods for grid path planning, Journal of Artificial Intelligence Research 67 (2020) 81–113
2020
-
[51]
S. R. Bassolillo, G. Raspaolo, L. Blasi, E. D’Amato, I. Notaro, Path planning for fixed-wing unmanned aerial vehicles: An integrated approach with theta* and clothoids, Drones 8 (2024) 62
2024
-
[52]
D. Silver, Cooperative pathfinding, Proceedings of the AAAI Conference on Artificial Intelligence and Interactive Digital Entertainment 1 (2005) 117–122. doi:10.1609/aiide.v1i1.18726
-
[53]
Vemula, K
A. Vemula, K. Muelling, J. Oh, Path planning in dynamic environments with adaptive dimensionality, in: Proceedings of the International Symposium on Combinatorial Search, volume 7, 2016, pp. 107–115
2016
-
[54]
Phillips, M
M. Phillips, M. Likhachev, SIPP: Safe interval path planning for dynamic environments, in: 2011 IEEE International Conference on Robotics and Automation, IEEE, 2011, pp. 5628–5635
2011
-
[55]
von der Burg, A
M. von der Burg, A. Sharpanskykh, Multi-agent planning for autonomous airport surface movement operations, SESAR Innovation Days 2023 (2023). 36
2023
-
[56]
Yakovlev, A
K. Yakovlev, A. Andreychuk, Any-angle pathfinding for multiple agents based on SIPP algorithm, in: Proceedings of the International Conference on Automated Planning and Scheduling, volume 27, 2017, pp. 586–594
2017
-
[57]
Y . Zou, C. Borst, Zeta*-SIPP: Improved time-optimal any-angle safe-interval path planning, in: Proceedings of the 33rd International Joint Conference on Artificial Intelligence, 2024, pp. 6823–6830. doi:10.24963/ijcai.2024/754
-
[58]
Andreychuk, K
A. Andreychuk, K. Yakovlev, P. Surynek, D. Atzmon, R. Stern, Multi-agent pathfinding with continuous time, Artificial Intelligence 305 (2022) 103662
2022
-
[59]
Yakovlev, A
K. Yakovlev, A. Andreychuk, R. Stern, Optimal and bounded suboptimal any-angle multi-agent pathfinding, in: 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), IEEE, 2024, pp. 7996–8001
2024
-
[60]
Sharon, R
G. Sharon, R. Stern, A. Felner, N. R. Sturtevant, Conflict-based search for optimal multi-agent pathfinding, Artificial Intelligence 219 (2015) 40–66
2015
-
[61]
J. Wang, W. Chi, C. Li, C. Wang, M. Q.-H. Meng, Neural RRT*: Learning-based optimal path planning, IEEE Transactions on Automation Science and Engineering 17 (2020) 1748–1758
2020
-
[62]
Kirilenko, A
D. Kirilenko, A. Andreychuk, A. I. Panov, K. Yakovlev, Generative models for grid-based and image-based pathfinding, Artificial Intelligence 338 (2025) 104238
2025
-
[63]
Accessed on Jul
EASA, Machine learning application approval, https://www.easa.europa.eu/en/research-projects/ machine-learning-application-approval , 2024. Accessed on Jul. 2nd, 2025
2024
-
[64]
M. Herman, Towards Explainable Automation for Air Tra ffic Control Using Deep Q-learning from Demonstrations and Reward Decomposi- tion, Master’s thesis, Delft University of Technology, Faculty of Aerospace Engineering, 2021
2021
-
[65]
Juozapaitis, A
Z. Juozapaitis, A. Koul, A. Fern, M. Erwig, F. Doshi-Velez, Explainable reinforcement learning via reward decomposition, in: IJCAI /ECAI Workshop on Explainable Artificial Intelligence, 2019
2019
-
[66]
Papadopoulos, A
G. Papadopoulos, A. Bastas, G. A. V ouros, I. Crook, N. Andrienko, G. Andrienko, J. M. Cordero, Deep reinforcement learning in service of air traffic controllers to resolve tactical conflicts, Expert Systems with Applications 236 (2024) 121234
2024
-
[67]
Y . Zou, C. Borst, Towards a unified taxonomy for algorithmic transparency: insights from uncrewed air tra ffic management, Cognition, Technology & Work 28 (2026) 229–255
2026
-
[68]
Manzinger, C
S. Manzinger, C. Pek, M. Altho ff, Using reachable sets for trajectory planning of automated vehicles, IEEE Transactions on Intelligent Vehicles 6 (2020) 232–248
2020
-
[69]
J. E. Bresenham, Algorithm for computer control of a digital plotter, in: Seminal graphics: pioneering e fforts that shaped the field, 1998, pp. 1–6
1998
-
[70]
Wu, An e fficient antialiasing technique, ACM Siggraph Computer Graphics 25 (1991) 143–152
X. Wu, An e fficient antialiasing technique, ACM Siggraph Computer Graphics 25 (1991) 143–152
1991
-
[71]
Y . Zou, H. Zhang, G. Zhong, H. Liu, D. Feng, Collision probability estimation for small unmanned aircraft systems, Reliability Engineering & System Safety 213 (2021) 107619
2021
-
[72]
Jardin, Grid-based strategic air tra ffic conflict detection, in: AIAA Guidance, Navigation, and Control Conference and Exhibit, 2005, p
M. Jardin, Grid-based strategic air tra ffic conflict detection, in: AIAA Guidance, Navigation, and Control Conference and Exhibit, 2005, p. 5826
2005
-
[73]
Koeners, M
J. Koeners, M. de Vries, Conflict resolution support for air tra ffic control based on solution spaces: Design and implementation, in: 2008 IEEE/AIAA 27th Digital Avionics Systems Conference, IEEE, 2008, pp. 3–C
2008
-
[74]
G. A. M. Velasco, C. Borst, J. Ellerbroek, M. Van Paassen, M. Mulder, The use of intent information in conflict detection and resolution models based on dynamic velocity obstacles, IEEE Transactions on Intelligent Transportation Systems 16 (2015) 2297–2302
2015
-
[75]
Idris, R
H. Idris, R. Vivona, J.-L. Garcia-Chico, D. Wing, Distributed tra ffic complexity management by preserving trajectory flexibility, in: 2007 IEEE/AIAA 26th Digital Avionics Systems Conference, IEEE, 2007, pp. 3–B
2007
-
[76]
Idris, T
H. Idris, T. El-Wakil, D. Wing, Trajectory planning by preserving flexibility: metrics and analysis, in: AIAA Guidance, Navigation and Control Conference and Exhibit, 2008, p. 7406
2008
-
[77]
Whelan, E ffective analysis of reaction time data, The Psychological Record 58 (2008) 475–482
R. Whelan, E ffective analysis of reaction time data, The Psychological Record 58 (2008) 475–482. 37
2008
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.