Context-Triggered Robust MPC for Temporal Logic Specifications
Pith reviewed 2026-07-03 19:07 UTC · model grok-4.3
The pith
The MPC value function serves as a reachability certificate for almost-sure satisfaction of context-dependent reach-avoid-stay objectives under bounded disturbances.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
For discrete-time linear systems subject to additive bounded disturbances, the value function of a suitably formulated robust MPC problem serves as a reachability certificate for the almost-sure satisfaction of reach-avoid-stay specifications; avoidance is enforced by the robust constraints inside the MPC, the stay requirement is met by switching to a local invariant controller, and convex duality produces equivalent deterministic convex quadratic or second-order cone programs.
What carries the argument
Switching architecture of robust MPC with local invariant controller, where the MPC value function acts as the reachability certificate for cRAS objectives.
If this is right
- The synthesized controller guarantees almost-sure satisfaction of the context-dependent reach-avoid-stay objectives.
- Avoidance is maintained at every step by the robust constraints inside the MPC optimization.
- The stay phase is enforced by switching to the local invariant controller once the target set is reached.
- The resulting optimization problems are convex quadratic or second-order cone programs for common geometric choices.
- The feasible region is strictly larger than that obtained from Lyapunov-based certificate methods on the same robot navigation task.
Where Pith is reading between the lines
- The same certificate-plus-duality structure could be tested on systems with parametric uncertainty if the robust constraints are adjusted accordingly.
- Because the architecture already supports online task reconfiguration, it may directly extend to multi-agent settings where contexts change asynchronously.
- The explicit separation of reach, avoid, and stay phases suggests a modular way to incorporate new temporal operators without redesigning the entire MPC layer.
Load-bearing premise
The certificate conditions for almost-sure satisfaction of RAS specifications remain valid for the linear systems and the prior reduction from context-triggered temporal logic to cRAS objectives continues to apply.
What would settle it
A concrete linear system and disturbance bound for which the MPC value function satisfies the certificate inequalities yet a closed-loop trajectory violates the reach-avoid-stay specification with positive probability.
Figures
read the original abstract
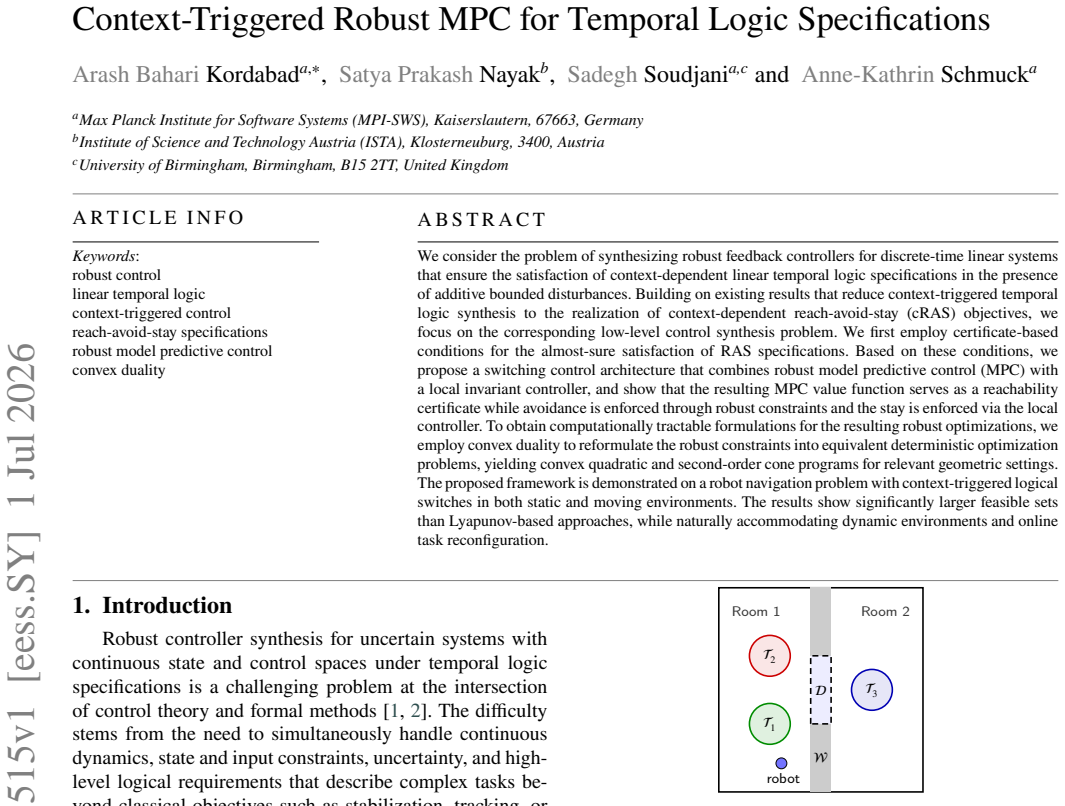
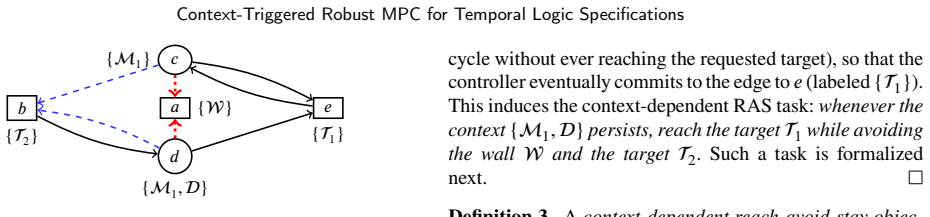
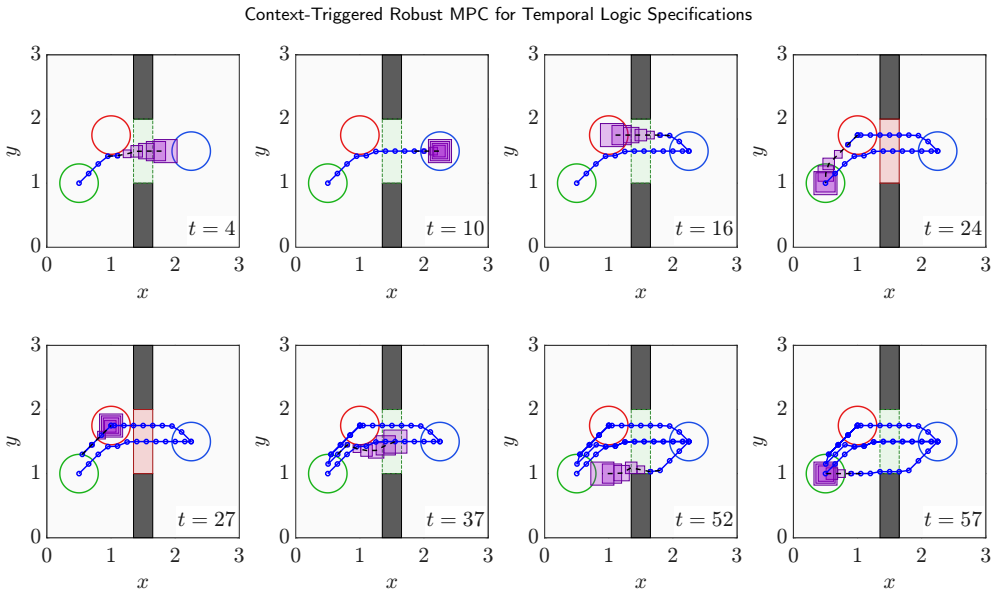
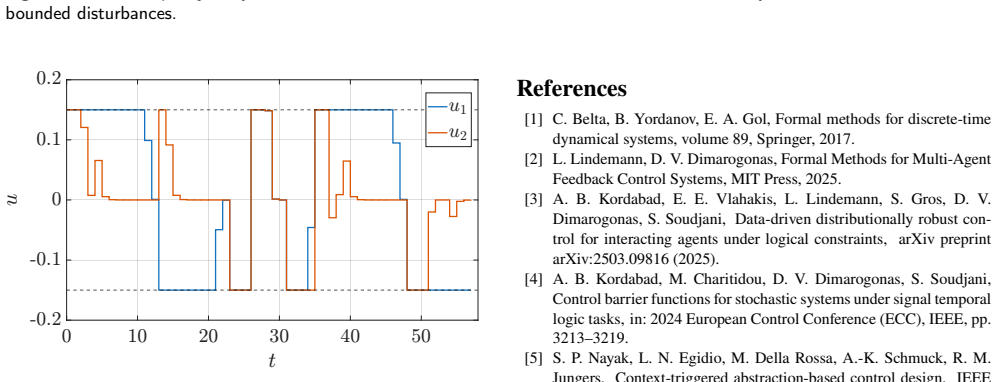
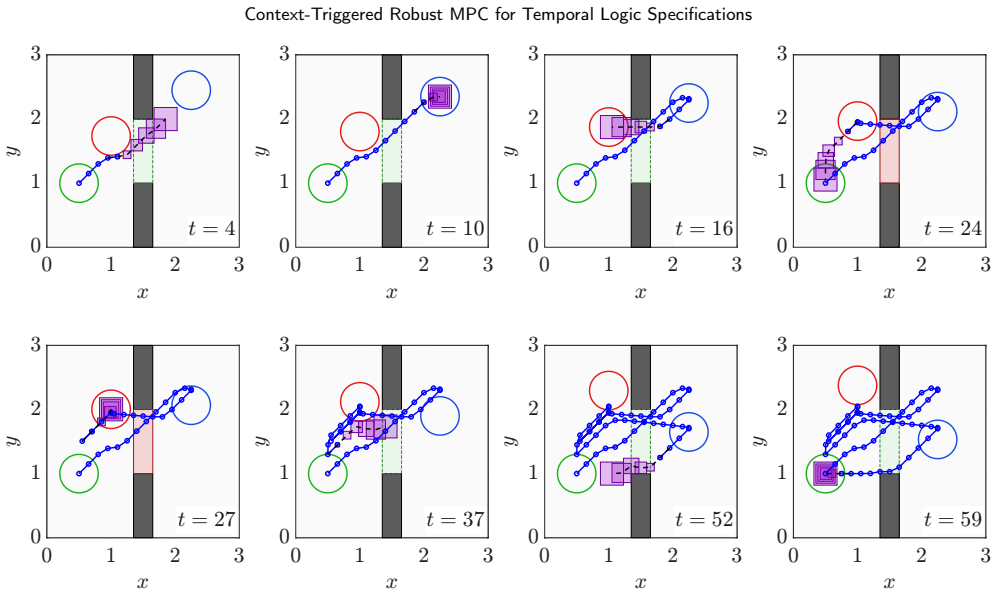
We consider the problem of synthesizing robust feedback controllers for discrete-time linear systems that ensure the satisfaction of context-dependent linear temporal logic specifications in the presence of additive bounded disturbances. Building on existing results that reduce context-triggered temporal logic synthesis to the realization of context-dependent reach-avoid-stay (cRAS) objectives, we focus on the corresponding low-level control synthesis problem. We first employ certificate-based conditions for the almost-sure satisfaction of RAS specifications. Based on these conditions, we propose a switching control architecture that combines robust model predictive control (MPC) with a local invariant controller, and show that the resulting MPC value function serves as a reachability certificate while avoidance is enforced through robust constraints and the stay is enforced via the local controller. To obtain computationally tractable formulations for the resulting robust optimizations, we employ convex duality to reformulate the robust constraints into equivalent deterministic optimization problems, yielding convex quadratic and second-order cone programs for relevant geometric settings. The proposed framework is demonstrated on a robot navigation problem with context-triggered logical switches in both static and moving environments. The results show significantly larger feasible sets than Lyapunov-based approaches, while naturally accommodating dynamic environments and online task reconfiguration.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript addresses synthesis of robust feedback controllers for discrete-time linear systems subject to additive bounded disturbances to satisfy context-dependent linear temporal logic specifications. Building on prior reductions of context-triggered TL synthesis to context-dependent reach-avoid-stay (cRAS) objectives, it employs certificate-based conditions for almost-sure RAS satisfaction, proposes a switching architecture combining robust MPC with a local invariant controller, establishes that the MPC value function serves as a reachability certificate, enforces avoidance via robust constraints and stay via the local controller, and applies convex duality to obtain equivalent deterministic QP and SOCP formulations. The approach is demonstrated on a robot navigation example with context-triggered switches in both static and moving environments, reporting larger feasible sets than Lyapunov-based methods while supporting dynamic environments and online reconfiguration.
Significance. If the certificate conditions, MPC-as-certificate argument, and duality reformulations are valid, the work offers a computationally tractable bridge between formal methods and robust MPC for uncertain linear systems. It improves feasible-set size over Lyapunov approaches and naturally handles context switches and moving obstacles, which could enable more flexible controller synthesis in robotics and autonomous systems.
minor comments (3)
- [Abstract] The abstract states that results show 'significantly larger feasible sets than Lyapunov-based approaches' but does not specify the quantitative metric or comparison table; a dedicated comparison subsection or table would strengthen the claim.
- Notation for the cRAS objectives and certificate functions is introduced without an explicit summary table relating symbols to their roles (e.g., value function V, robust constraint sets); adding such a table would improve readability.
- The robot navigation example mentions both static and moving environments but does not report computation times or solver details for the resulting QP/SOCP programs; including these would clarify practical tractability.
Simulated Author's Rebuttal
We thank the referee for the detailed summary and positive assessment of the manuscript. The recommendation for minor revision is noted. No specific major comments were provided in the report, so we have no points to address point-by-point at this stage. We will incorporate any minor suggestions during revision.
Circularity Check
No significant circularity detected
full rationale
The derivation relies on explicitly cited prior results for the TL-to-cRAS reduction and certificate conditions for almost-sure RAS satisfaction, but the paper's core technical steps—the switching architecture, the argument that the MPC value function serves as reachability certificate, robust-constraint enforcement of avoidance, local-controller enforcement of stay, and convex-duality reformulation to QP/SOCP—are developed independently inside the paper using standard robust-MPC and duality techniques. No step reduces by construction to a fitted input, self-definition, or load-bearing self-citation chain; the central claims retain independent content.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Certificate-based conditions exist for almost-sure satisfaction of RAS specifications in discrete-time linear systems
- domain assumption Context-triggered temporal logic synthesis reduces to context-dependent reach-avoid-stay objectives
Reference graph
Works this paper leans on
-
[1]
Belta, B
C. Belta, B. Yordanov, E. A. Gol, Formal methods for discrete-time dynamical systems, volume 89, Springer, 2017
2017
-
[2]
L.Lindemann,D.V.Dimarogonas,FormalMethodsforMulti-Agent Feedback Control Systems, MIT Press, 2025
2025
- [3]
-
[4]
A. B. Kordabad, M. Charitidou, D. V. Dimarogonas, S. Soudjani, Controlbarrierfunctionsforstochasticsystemsundersignaltemporal logictasks, in:2024EuropeanControlConference(ECC),IEEE,pp. 3213–3219
-
[5]
S. P. Nayak, L. N. Egidio, M. Della Rossa, A.-K. Schmuck, R. M. Jungers, Context-triggered abstraction-based control design, IEEE Open Journal of Control Systems 2 (2023) 277–296
2023
-
[6]
Nejati, S
A. Nejati, S. Prakash Nayak, A.-K. Schmuck, Context-triggered games for reactive synthesis over stochastic systems via control barrier certificates, in: Proceedings of the 27th ACM International Conference on Hybrid Systems: Computation and Control, pp. 1–12
-
[7]
A.Anand,S.P.Nayak,A.Schmuck,Synthesizingpermissivewinning strategy templates for parity games, in: C. Enea, A. Lal (Eds.), Computer Aided Verification - 35th International Conference, CAV 2023, Paris, France, July 17-22, 2023, Proceedings, Part I, Lecture Notes in Computer Science, Springer, 2023, pp. 436–458
2023
-
[8]
Anand, K
A. Anand, K. Mallik, S. P. Nayak, A.-K. Schmuck, Computing adequately permissive assumptions for synthesis, in: International Conference on Tools and Algorithms for the Construction and Anal- ysis of Systems, Springer, pp. 211–228
-
[9]
A. D. Ames, S. Coogan, M. Egerstedt, G. Notomista, K. Sreenath, P. Tabuada, Control barrier functions: Theory and applications, in: 2019 18th European control conference (ECC), Ieee, pp. 3420–3431
2019
-
[10]
Majumdar, V
R. Majumdar, V. Sathiyanarayana, S. Soudjani, Necessary and suffi- cient certificates for almost sure reachability, IEEE Control Systems Letters (2024). Bahari Kordabad et al.:Preprint submitted to ElsevierPage 12 of 14 Context-Triggered Robust MPC for Temporal Logic Specifications x0 1 2 3 y 0 1 2 3 t=4 x0 1 2 3 y 0 1 2 3 t=10 x0 1 2 3 y 0 1 2 3 t=16 x0 ...
2024
- [11]
-
[12]
A. B. Kordabad, R. Majumdar, S. Soudjani, Almost sure reach- ability in continuous-time stochastic systems, arXiv preprint arXiv:2605.03595 (2026)
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[13]
J. B. Rawlings, D. Q. Mayne, M. Diehl, Model predictive control: theory, computation, and design, volume 2, Nob Hill Publishing Madison, WI, 2017
2017
-
[14]
Langson, I
W. Langson, I. Chryssochoos, S. Raković, D. Q. Mayne, Robust modelpredictivecontrolusingtubes, Automatica40(2004)125–133
2004
-
[15]
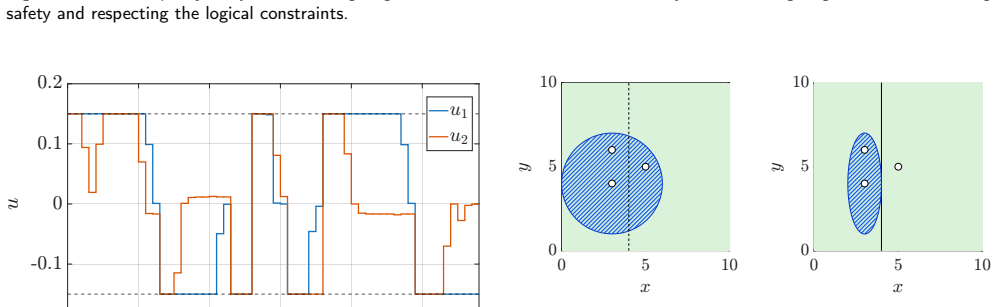
I.Batkovic,U.Rosolia,M.Zanon,P.Falcone, ArobustscenarioMPC approachforuncertainmulti-modalobstacles, IEEEControlSystems Letters 5 (2020) 947–952. x0 5 10 y 0 5 10 x0 5 10 y 0 5 10 Figure 7:Comparison of the feasible sets obtained with the proposed robust MPC approach (green region) and the control Lyapunov function-based approach of [5] (blue hatched regi...
2020
-
[16]
Tabuada, Verification and control of hybrid systems: a symbolic approach, Springer Science & Business Media, 2009
P. Tabuada, Verification and control of hybrid systems: a symbolic approach, Springer Science & Business Media, 2009
2009
-
[17]
M.Rungger,M.Zamani, SCOTS:Atoolforthesynthesisofsymbolic controllers, in: Proceedings of the 19th International Conference on Hybrid Systems: Computation and Control, HSCC ’16, ACM, New York, NY, USA, 2016, pp. 99–104
2016
-
[18]
O. L. Bulancea, P. Nilsson, N. Ozay, Nonuniform abstractions, re- finement and controller synthesis with novel BDD encodings, IFAC- PapersOnLine 51 (2018) 19–24
2018
-
[19]
K. Hsu, R. Majumdar, K. Mallik, A.-K. Schmuck, Multi-layered abstraction-based controller synthesis for continuous-time systems, in: HSCC’18, ACM, pp. 120–129
-
[20]
Khaled, M
M. Khaled, M. Zamani, pFaces: an acceleration ecosystem for symbolic control, in: HSCC’19, ACM, pp. 252–257
-
[21]
Y. Li, J. Liu, ROCS: A robustly complete control synthesis tool for nonlinear dynamical systems, in: HSCC’18, ACM, pp. 130–135. Bahari Kordabad et al.:Preprint submitted to ElsevierPage 13 of 14 Context-Triggered Robust MPC for Temporal Logic Specifications
-
[22]
Majumdar, K
R. Majumdar, K. Mallik, M. Rychlicki, A.-K. Schmuck, S. Soudjani, Aflexibletoolchainforsymbolicrabingamesunderfairandstochastic uncertainties, in: C. Enea, A. Lal (Eds.), Computer Aided Verifica- tion, Springer Nature Switzerland, Cham, 2023, pp. 3–15
2023
-
[23]
Belta, S
C. Belta, S. Sadraddini, Formal methods for control synthesis: An optimization perspective, Annual Review of Control, Robotics, and Autonomous Systems 2 (2019) 115–140
2019
-
[24]
Firouzmand, H
E. Firouzmand, H. A. Talebi, F. Abdollahi, Robust MPC-based abstraction for motion planning of a mobile robot, in: 2021 9th RSI International Conference on Robotics and Mechatronics (ICRoM), IEEE, pp. 485–490
2021
-
[25]
A.Nikou,C.K.Verginis,S.Heshmati-alamdari,D.V.Dimarogonas, Arobustnon-linearMPCframeworkforcontrolofunderwatervehicle manipulator systems under high-level tasks, IET Control Theory & Applications 15 (2021) 323–337
2021
-
[26]
S.Sadraddini,C.Belta, Robusttemporallogicmodelpredictivecon- trol, in: 2015 53rd Annual Allerton Conference on Communication, Control, and Computing (Allerton), IEEE, pp. 772–779
2015
-
[27]
Nejati, A.-K
A. Nejati, A.-K. Schmuck, Reactive synthesis of stochastic control systems: A mode-triggered safety barrier approach, in: 2024 IEEE 63rd Conference on Decision and Control (CDC), pp. 5225–5230
2024
-
[28]
Baier, J.-P.Katoen, Principles of Model Checking, MIT Press, 2008
C. Baier, J.-P.Katoen, Principles of Model Checking, MIT Press, 2008
2008
-
[29]
Demri, V
S. Demri, V. Goranko, M. Lange, Temporal Logics in Computer Science:Finite-StateSystems,CambridgeUniversityPress,USA,1st edition, 2016
2016
-
[30]
Finkbeiner, Synthesis of reactive systems., Dependable Software Systems Engineering 45 (2016) 72–98
B. Finkbeiner, Synthesis of reactive systems., Dependable Software Systems Engineering 45 (2016) 72–98
2016
-
[31]
Anand, S
A. Anand, S. P. Nayak, A. Schmuck, Strategy templates - robust certifiedinterfacesforinteractingsystems, in:S.Akshay,A.Niemetz, S. Sankaranarayanan (Eds.), Automated Technology for Verification and Analysis - 22nd International Symposium, ATVA 2024, Kyoto, Japan, October 21-25, 2024, Proceedings, Part I, Lecture Notes in Computer Science, Springer, 2024, ...
2024
-
[32]
Borwein, A
J. Borwein, A. Lewis, Convex Analysis and Nonlinear Optimization: Theoryand Examples, Springer, 2006
2006
-
[33]
Sion, On general minimax theorems, Pacific Journal of Mathe- matics 8 (1958) 171–176
M. Sion, On general minimax theorems, Pacific Journal of Mathe- matics 8 (1958) 171–176
1958
-
[34]
S. Boyd, L. Vandenberghe, Convex optimization, Cambridge univer- sity press, 2004
2004
-
[35]
Andersson, J
J. Andersson, J. Gillis, G. Horn, J. Rawlings, M. Diehl, CasADi—a software framework for nonlinear optimization and optimal control, Mathematical Programming Computation 11 (2018) 1–36. Bahari Kordabad et al.:Preprint submitted to ElsevierPage 14 of 14
2018
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.