WISE: A Long-Horizon Agent in Minecraft with Why-Which Reasoning
Pith reviewed 2026-06-27 07:19 UTC · model grok-4.3
The pith
Causal event graphs let Minecraft agents recall past events reliably after viewpoint shifts and reorder subtasks opportunistically.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
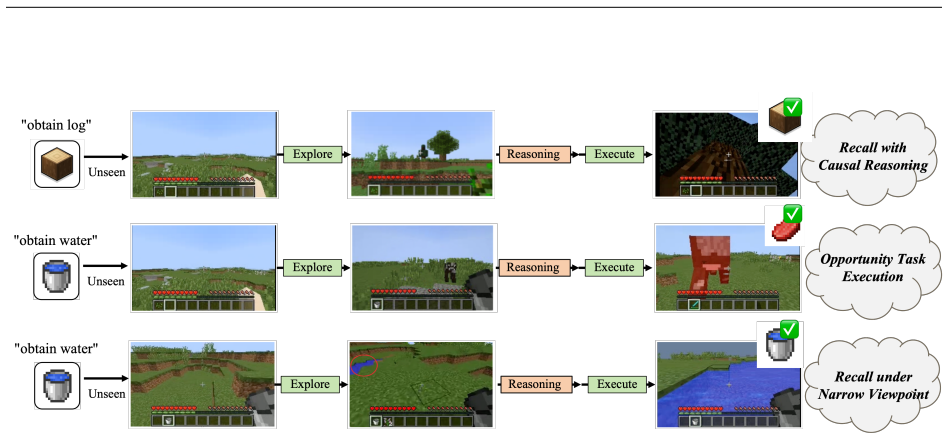
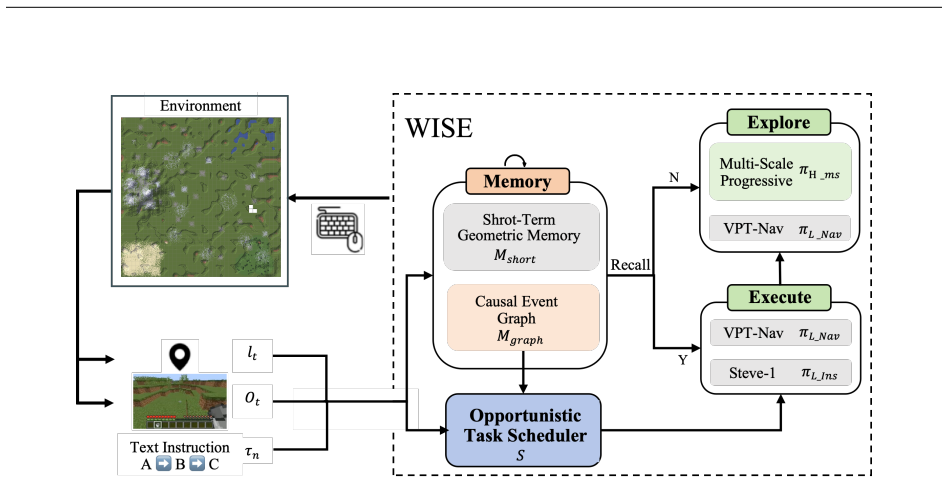
By embedding a Causal Event Graph in the low-level controller, WISE augments episodic memory with explicit causal structure that ties observations to task relevance, enabling robust recall under viewpoint changes and opportunistic task reordering that improves success and efficiency on long-horizon sparse tasks.
What carries the argument
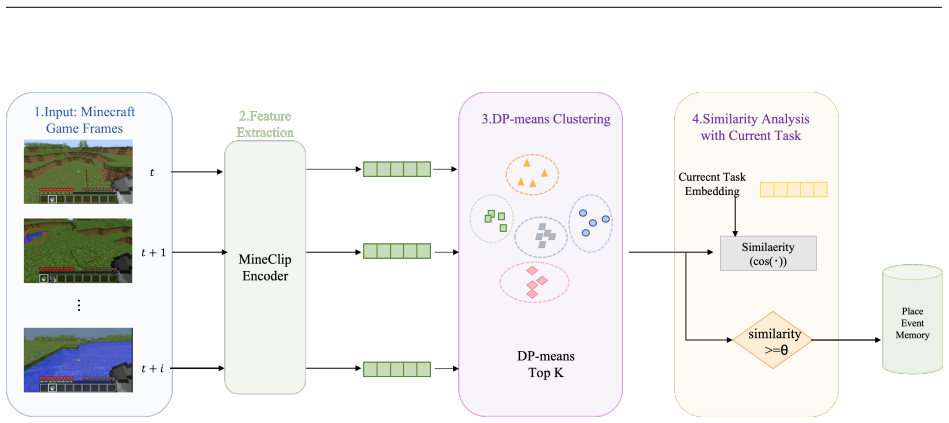
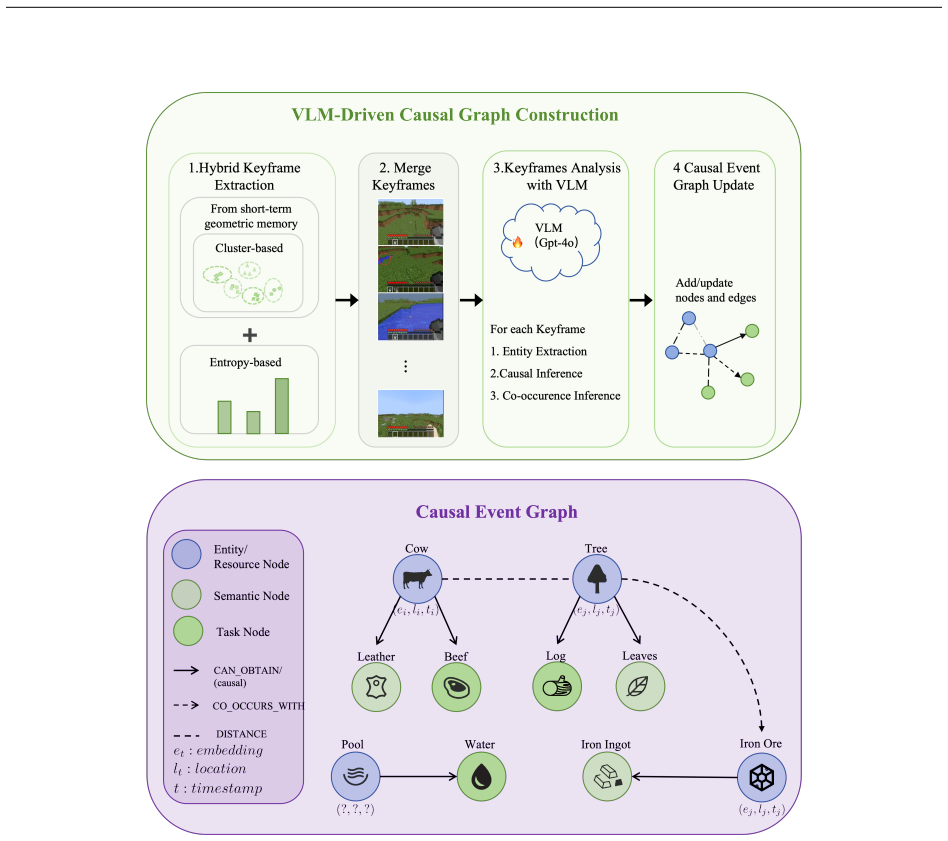
Causal Event Graph that augments episodic memory by explicitly linking each observation to its causal relevance for the current task, replacing feature-similarity retrieval.
If this is right
- Task success rates rise on long-horizon sparse-reward problems.
- Efficiency improves especially when the agent must make adaptive decisions mid-execution.
- Subtasks can be dynamically re-prioritized when causally relevant opportunities are detected.
- Multi-scale progressive exploration supplies more complete spatial observations for downstream reasoning.
Where Pith is reading between the lines
- The same causal-graph memory could reduce re-exploration costs in other partially observable environments.
- Separating why-which causal reasoning from basic what-where-when storage may scale to longer sequences than current similarity-based methods.
- Real-world robots that change viewpoint frequently might benefit from the same explicit causal tagging of events.
Load-bearing premise
The assumption that building explicit causal links from observations to task goals will produce reliable recall when the agent's viewpoint changes.
What would settle it
An ablation experiment that replaces the Causal Event Graph with feature-similarity retrieval and measures whether recall accuracy and overall task success drop under controlled viewpoint changes.
Figures
read the original abstract
Rapid advances have been made in developing general-purpose embodied agent in environments like Minecraft through the adoption of LLM-augmented hierarchical approaches. Despite their promise, low-level controllers often become performance bottlenecks due to repeated execution failures. We argue that a key limitation is not only the lack of episodic memory, but also the decoupling of \textit{what-where-when} memory from \textit{which-why} reasoning. To address this, we propose \textbf{WISE} (Which-Why Informed Semantic Explorer), a long-horizon agent framework with an enhanced low-level controller equipped with a Causal Event Graph that augments episodic memory with explicit causal structure linking observations to task relevance. Unlike prior work such as MrSteve, which relies on feature similarity for retrieval, WISE enables robust recall under viewpoint changes and supports opportunistic task reordering through causal reasoning. Building on this memory, we propose an Opportunistic Task Scheduler that dynamically re-prioritizes subtasks when causally relevant opportunities are detected. We further equip WISE with a multi-scale progressive exploration strategy to provide spatially comprehensive observations for downstream reasoning. Experiments show that WISE largely improves task success and efficiency on long-horizon sparse tasks, particularly in settings requiring adaptive decision-making.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes WISE, a hierarchical LLM-augmented agent for long-horizon Minecraft tasks. It augments the low-level controller with a Causal Event Graph that adds explicit causal structure to episodic memory (linking observations to task relevance), enabling robust recall under viewpoint changes and opportunistic reordering, in contrast to feature-similarity retrieval in prior work such as MrSteve. An Opportunistic Task Scheduler dynamically re-prioritizes subtasks on detecting causally relevant opportunities, and a multi-scale progressive exploration strategy supplies spatially comprehensive observations. The central claim is that these components produce large gains in task success and efficiency on long-horizon sparse-reward tasks, especially those requiring adaptive decision-making.
Significance. If the experimental claims hold, the explicit integration of causal structure into memory retrieval and scheduling would address a recognized bottleneck in current hierarchical embodied agents. The distinction between what-where-when memory and which-why reasoning, together with the proposed graph-based mechanism for viewpoint-invariant recall and reordering, offers a concrete direction for improving robustness in sparse, long-horizon settings.
major comments (2)
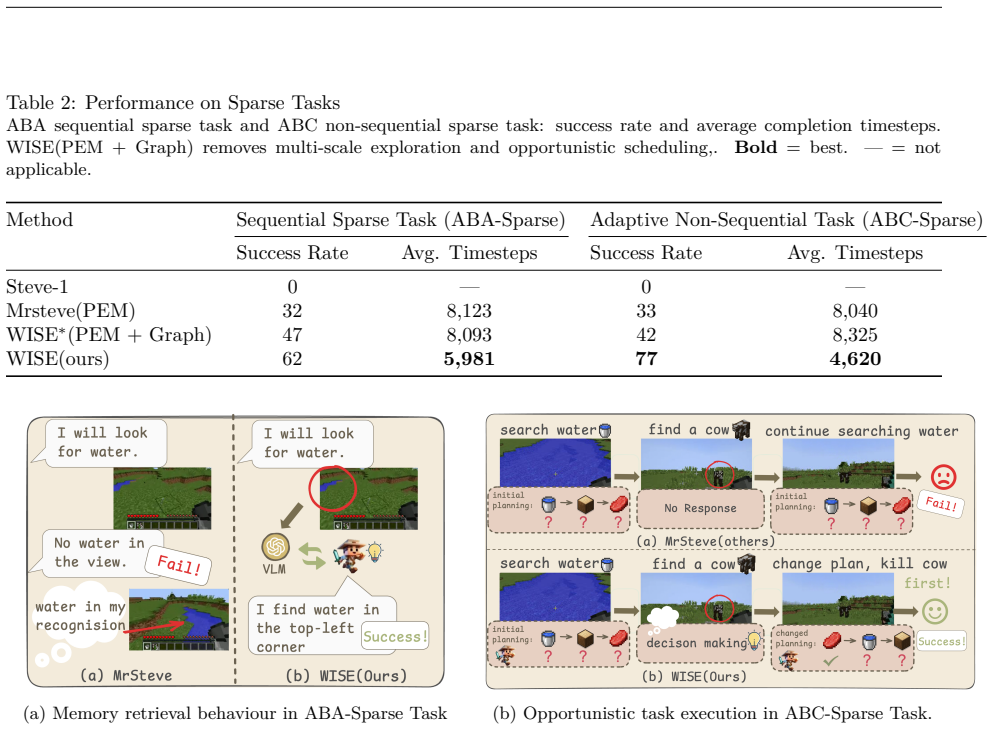
- [Abstract] Abstract: The assertion that 'Experiments show that WISE largely improves task success and efficiency' supplies no quantitative metrics (success rates, efficiency measures, number of trials, statistical significance), no baseline comparisons (e.g., vs. MrSteve), and no ablation isolating the Causal Event Graph from the multi-scale exploration component. This absence makes it impossible to evaluate whether the claimed mechanism produces the reported gains.
- [Abstract] Abstract / Method description: No details are given on how the Causal Event Graph is constructed, how causal links are inferred from observations, or how the graph is queried for recall and reordering. Without these, the central premise that the graph enables 'robust recall under viewpoint changes' and 'opportunistic task reordering' cannot be assessed.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback highlighting issues with the abstract. We agree that the abstract requires quantitative results and additional methodological details to better support the claims. We will revise the abstract accordingly while ensuring the full manuscript already contains the supporting details in the methods and experiments sections.
read point-by-point responses
-
Referee: [Abstract] Abstract: The assertion that 'Experiments show that WISE largely improves task success and efficiency' supplies no quantitative metrics (success rates, efficiency measures, number of trials, statistical significance), no baseline comparisons (e.g., vs. MrSteve), and no ablation isolating the Causal Event Graph from the multi-scale exploration component. This absence makes it impossible to evaluate whether the claimed mechanism produces the reported gains.
Authors: We agree that the abstract is currently qualitative and lacks specific metrics. The experiments section (Section 4) reports success rates, efficiency measures, comparisons to MrSteve, number of trials, and ablations isolating the Causal Event Graph. In the revision, we will condense key quantitative results, baseline comparisons, and ablation findings into the abstract for self-containment. revision: yes
-
Referee: [Abstract] Abstract / Method description: No details are given on how the Causal Event Graph is constructed, how causal links are inferred from observations, or how the graph is queried for recall and reordering. Without these, the central premise that the graph enables 'robust recall under viewpoint changes' and 'opportunistic task reordering' cannot be assessed.
Authors: The full manuscript details the Causal Event Graph construction, causal link inference, and querying in Sections 3.2 and 3.3. To address the concern about the abstract, we will add a concise description of these elements (e.g., how observations are linked to task relevance via causal edges and how viewpoint-invariant recall is achieved) to the revised abstract. revision: yes
Circularity Check
No circularity: proposal relies on design choices and external experiments, not self-referential reductions
full rationale
The manuscript describes a hierarchical agent architecture (WISE) that augments episodic memory via a Causal Event Graph and an Opportunistic Task Scheduler. No equations, fitted parameters, or quantitative derivations appear in the text. The central claims rest on experimental outcomes rather than any self-definitional loop, fitted-input prediction, or load-bearing self-citation. Contrast with MrSteve is presented as motivation for a new design choice, not as an imported uniqueness theorem or ansatz. The derivation chain is therefore self-contained against external benchmarks and receives the default non-finding.
Axiom & Free-Parameter Ledger
invented entities (1)
-
Causal Event Graph
no independent evidence
Reference graph
Works this paper leans on
-
[1]
arXiv e-prints , pages=
CraftAssist: A Framework for Dialogue-enabled Interactive Agents , author=. arXiv e-prints , pages=
-
[2]
arXiv preprint arXiv:2603.13131 , year=
Steve-Evolving: Open-World Embodied Self-Evolution via Fine-Grained Diagnosis and Dual-Track Knowledge Distillation , author=. arXiv preprint arXiv:2603.13131 , year=
-
[3]
International Conference on Machine Learning , pages=
LARM: Large Auto-Regressive Model for Long-Horizon Embodied Intelligence , author=. International Conference on Machine Learning , pages=. 2025 , organization=
2025
-
[4]
Proceedings of the Thirty-Fourth International Joint Conference on Artificial Intelligence , pages=
ODYSSEY: empowering minecraft agents with open-world skills , author=. Proceedings of the Thirty-Fourth International Joint Conference on Artificial Intelligence , pages=
-
[5]
Proceedings of the 28th International Joint Conference on Artificial Intelligence , pages=
MineRL: a large-scale dataset of minecraft demonstrations , author=. Proceedings of the 28th International Joint Conference on Artificial Intelligence , pages=
-
[6]
arXiv preprint arXiv:2406.11247 , year=
Steve series: Step-by-step construction of agent systems in minecraft , author=. arXiv preprint arXiv:2406.11247 , year=
-
[7]
Advances in Neural Information Processing Systems , volume=
Video pretraining (vpt): Learning to act by watching unlabeled online videos , author=. Advances in Neural Information Processing Systems , volume=
-
[8]
Advances in Neural Information Processing Systems , volume=
Steve-1: A generative model for text-to-behavior in minecraft , author=. Advances in Neural Information Processing Systems , volume=
-
[9]
The Thirteenth International Conference on Learning Representations , year=
MrSteve: Instruction-Following Agents in Minecraft with What-Where-When Memory , author=. The Thirteenth International Conference on Learning Representations , year=
-
[10]
Voyager: An Open-Ended Embodied Agent with Large Language Models , author=
-
[11]
2024 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) , pages=
Mp5: A multi-modal open-ended embodied system in minecraft via active perception , author=. 2024 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) , pages=. 2024 , organization=
2024
-
[12]
Skill Reinforcement Learning and Planning for Open-World Long-Horizon Tasks , author=
-
[13]
Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , pages=
Open-world multi-task control through goal-aware representation learning and adaptive horizon prediction , author=. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , pages=
-
[14]
IEEE Transactions on Pattern Analysis and Machine Intelligence , year=
Jarvis-1: Open-world multi-task agents with memory-augmented multimodal language models , author=. IEEE Transactions on Pattern Analysis and Machine Intelligence , year=
-
[15]
Advances in neural information processing systems , volume=
Optimus-1: Hybrid multimodal memory empowered agents excel in long-horizon tasks , author=. Advances in neural information processing systems , volume=
-
[16]
Transactions on Machine Learning Research , year=
Cognitive architectures for language agents , author=. Transactions on Machine Learning Research , year=
-
[17]
ADAM: An Embodied Causal Agent in Open-World Environments , author=
-
[18]
Transactions on Machine Learning Research , volume=
NovelCraft: A dataset for novelty detection and discovery in Open Worlds , author=. Transactions on Machine Learning Research , volume=
-
[19]
Proceedings of the 37th International Conference on Neural Information Processing Systems , pages=
Describe, explain, plan and select: interactive planning with large language models enables open-world multi-task agents , author=. Proceedings of the 37th International Conference on Neural Information Processing Systems , pages=
-
[20]
International Conference on Learning Representations , year=
Learning To Explore Using Active Neural SLAM , author=. International Conference on Learning Representations , year=
-
[21]
Proceedings of the IEEE/CVF conference on computer vision and pattern recognition , pages=
Neural topological slam for visual navigation , author=. Proceedings of the IEEE/CVF conference on computer vision and pattern recognition , pages=
-
[22]
Advances in Neural Information Processing Systems , volume=
Noveld: A simple yet effective exploration criterion , author=. Advances in Neural Information Processing Systems , volume=
-
[24]
Advances in Neural Information Processing Systems , volume=
Minedojo: Building open-ended embodied agents with internet-scale knowledge , author=. Advances in Neural Information Processing Systems , volume=
-
[25]
arXiv preprint arXiv:2305.17144 , year=
Ghost in the minecraft: Generally capable agents for open-world environments via large language models with text-based knowledge and memory , author=. arXiv preprint arXiv:2305.17144 , year=
-
[26]
arXiv preprint arXiv:2112.04907 , year=
Juewu-mc: Playing minecraft with sample-efficient hierarchical reinforcement learning , author=. arXiv preprint arXiv:2112.04907 , year=
-
[27]
International Conference on Machine Learning , pages=
Zero-shot task generalization with multi-task deep reinforcement learning , author=. International Conference on Machine Learning , pages=. 2017 , organization=
2017
-
[28]
Transactions on Machine Learning Research , year=
A Generalist Agent , author=. Transactions on Machine Learning Research , year=
-
[29]
The Twelfth International Conference on Learning Representations , year=
GROOT: Learning to Follow Instructions by Watching Gameplay Videos , author=. The Twelfth International Conference on Learning Representations , year=
-
[30]
Advances in neural information processing systems , volume=
Language models are few-shot learners , author=. Advances in neural information processing systems , volume=
-
[31]
arXiv preprint arXiv:2302.13971 , year=
Llama: Open and efficient foundation language models , author=. arXiv preprint arXiv:2302.13971 , year=
-
[32]
arXiv preprint arXiv:2303.08774 , year=
Gpt-4 technical report , author=. arXiv preprint arXiv:2303.08774 , year=
-
[33]
7th Annual Conference on Robot Learning , year=
Bootstrap Your Own Skills: Learning to Solve New Tasks with Large Language Model Guidance , author=. 7th Annual Conference on Robot Learning , year=
-
[34]
Proceedings of the IEEE/CVF international conference on computer vision , pages=
Llm-planner: Few-shot grounded planning for embodied agents with large language models , author=. Proceedings of the IEEE/CVF international conference on computer vision , pages=
-
[35]
arXiv preprint arXiv:2402.03610 , year=
Rap: Retrieval-augmented planning with contextual memory for multimodal llm agents , author=. arXiv preprint arXiv:2402.03610 , year=
-
[36]
Enhancing Agent Learning through World Dynamics Modeling
Sun, Zhiyuan and Shi, Haochen and C \^o t \'e , Marc-Alexandre and Berseth, Glen and Yuan, Xingdi and Liu, Bang. Enhancing Agent Learning through World Dynamics Modeling. Findings of the Association for Computational Linguistics: EMNLP 2024. 2024. doi:10.18653/v1/2024.findings-emnlp.202
-
[37]
Advances in Neural Information Processing Systems , volume=
Reflexion: Language agents with verbal reinforcement learning , author=. Advances in Neural Information Processing Systems , volume=
-
[38]
Uncertainty in Artificial Intelligence , pages=
Revisiting dp-means: fast scalable algorithms via parallelism and delayed cluster creation , author=. Uncertainty in Artificial Intelligence , pages=. 2022 , organization=
2022
-
[39]
Proceedings of the second international conference on Autonomous agents , pages=
Frontier-based exploration using multiple robots , author=. Proceedings of the second international conference on Autonomous agents , pages=
-
[40]
Advances in neural information processing systems , volume=
\# exploration: A study of count-based exploration for deep reinforcement learning , author=. Advances in neural information processing systems , volume=
-
[41]
Robotics: Science and Systems XX , year=
GOAT: GO to Any Thing , author=. Robotics: Science and Systems XX , year=
-
[42]
arXiv preprint arXiv:2403.12037 , year=
Minedreamer: Learning to follow instructions via chain-of-imagination for simulated-world control , author=. arXiv preprint arXiv:2403.12037 , year=
-
[43]
Journal of Guidance, Control, and Dynamics , volume=
Navigation path planning for autonomous aircraft: Voronoi diagram approach , author=. Journal of Guidance, Control, and Dynamics , volume=
-
[44]
FrontierNet: Learning Visual Cues to Explore , author=
Sun, Boyang and Chen, Hanzhi and Leutenegger, Stefan and Cadena, Cesar and Pollefeys, Marc and Blum, Hermann , journal=. FrontierNet: Learning Visual Cues to Explore , author=. IEEE Robotics and Automation Letters , year=
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.