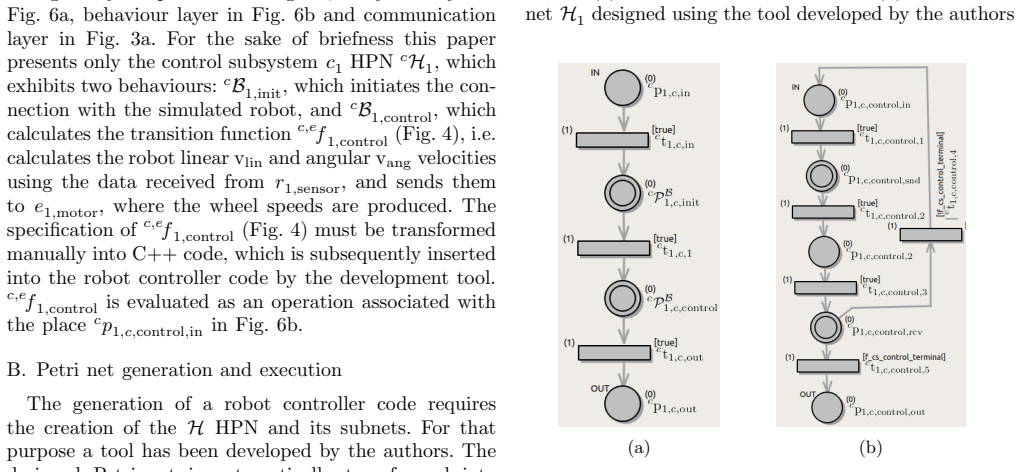
Methodology of Designing Multi-agent Robot Control Systems Utilising Hierarchical Petri Nets
Pith reviewed 2026-05-25 14:35 UTC · model grok-4.3
The pith
Robot systems are designed as five-layer hierarchical Petri nets that organize concurrent subsystems and enable automatic controller code generation.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
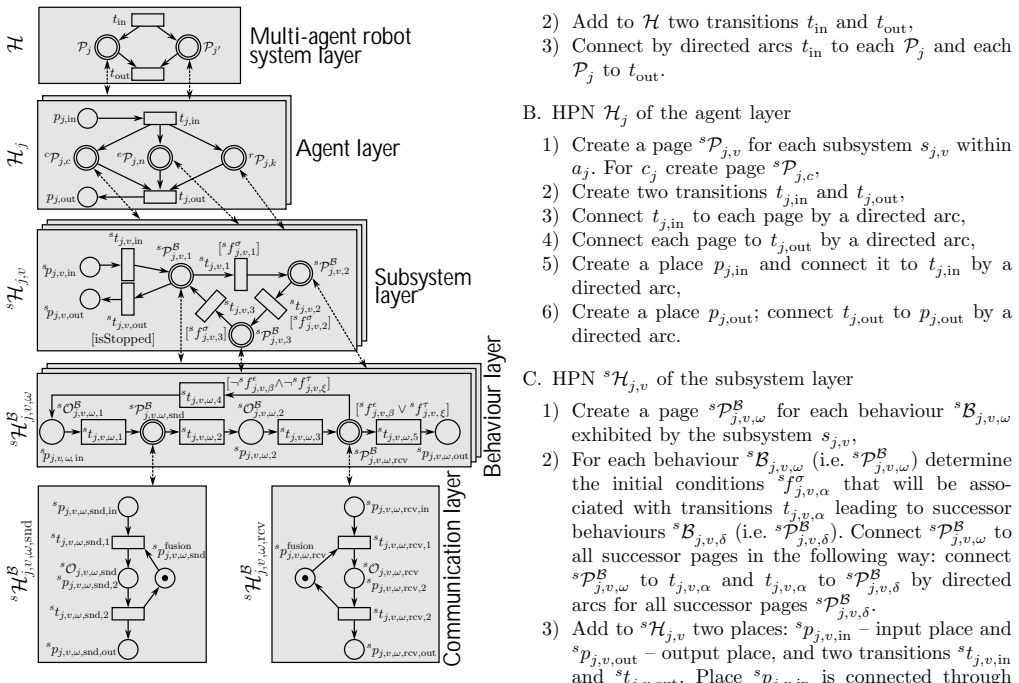
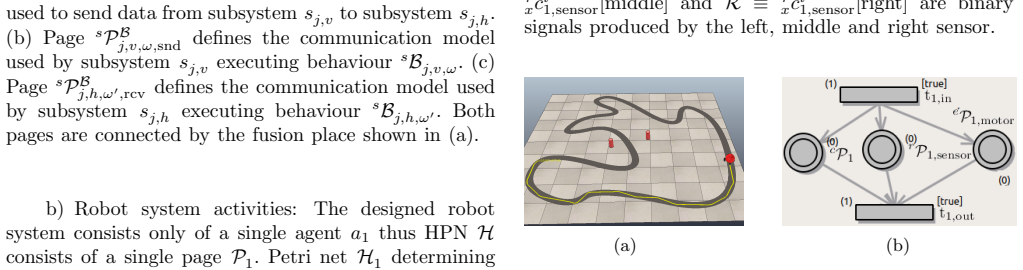
Activities of a robot system are represented by hierarchical Petri nets with conditions that are created by specifying five consecutive layers: the multi-agent robot system layer, the agent layer, the subsystem layer, the behaviour layer, and the communication layer. This decomposition organizes the development of a robot system in a systematic manner and introduces a comprehensive description of concurrently acting subsystems. A tool built on these considerations produces the nets and automatically generates the robot controller code, accelerating the implementation phase, as shown by the development of a controller for a rudimentary task.
What carries the argument
Hierarchical Petri nets with conditions built from five successive layers (multi-agent robot system, agent, subsystem, behaviour, communication) that model concurrent subsystem activities and support automatic code generation.
If this is right
- Development of robot systems follows a repeatable five-layer decomposition process.
- Communication between subsystems receives an explicit model rather than remaining an implementation detail.
- Controller code is produced directly from the Petri net description, shortening the coding stage.
- The same nets serve both as a design document and as input to automatic code generation.
Where Pith is reading between the lines
- The approach could be tested on tasks that require dynamic reconfiguration of subsystem interactions to see whether the fixed layer structure still suffices.
- Generated controllers might integrate more readily with formal verification tools that operate on Petri nets than controllers written by hand.
- The method could be applied to fleets of robots by treating the top layer as a collection of multiple embodied agents rather than a single robot.
Load-bearing premise
Specifying the five layers with hierarchical Petri nets with conditions is sufficient to capture all necessary behavior and to generate correct controller code automatically.
What would settle it
Run the tool on a multi-subsystem robot task with known concurrency requirements and check whether the generated code executes the concurrent behaviors without additional manual fixes or runtime errors.
Figures
read the original abstract
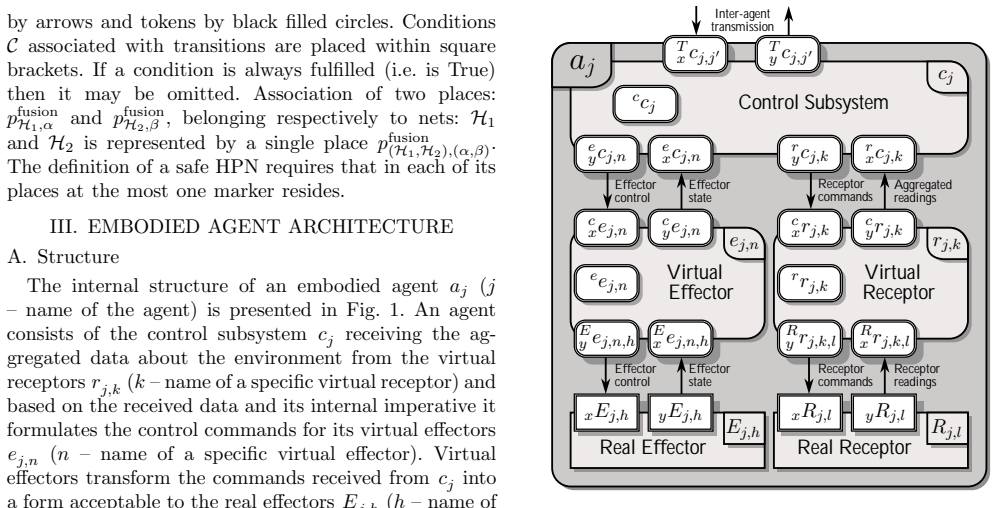
A robot system is designed as a set of embodied agents. An embodied agent is decomposed into cooperating subsystems. In our previous work activities of subsystems were defined by hierarchical finite state machines. With their states, activities were associated. In that approach communication between subsystems was treated as an implementation issue. This paper represents the activities of a robot system using hierarchical Petri nets with conditions. Such net is created by specifying consecutive layers: multi-agent robot system layer, agent layer, subsystem layer, behaviour layer and communication layer. This decomposition not only organizes in a systematic manner the development of a robot system but also introduces a comprehensive description of concurrently acting subsystems. Based on those theoretical considerations, a tool was created for producing hierarchical Petri nets defining the model of a robotic system and enabling automatic generation of the robot controller code, resulting in a significant acceleration of the implementation phase. The capabilities of the tool are presented by the development of a robot controller performing a rudimentary task.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a methodology for designing multi-agent robot control systems by representing activities via hierarchical Petri nets with conditions, decomposed into five layers (multi-agent robot system, agent, subsystem, behaviour, communication). This extends prior hierarchical finite state machine work by treating communication as part of the model. A tool is presented that generates the nets and automatically produces controller code, claimed to accelerate implementation; the approach is illustrated on a single rudimentary task.
Significance. If verified, the five-layer decomposition could offer a systematic organization for concurrent robot subsystems and the tool could reduce implementation effort. The explicit creation of a generation tool and its application to even a basic example constitute a concrete contribution toward practical use. However, the lack of any formal semantics or correctness argument for the generated code substantially reduces the assessed significance of the methodology.
major comments (2)
- [Abstract] Abstract: the claim that the tool 'enables automatic generation of the robot controller code' is load-bearing yet unsupported; no operational semantics are supplied for the hierarchical Petri nets with conditions, nor any argument that the generated code preserves concurrency or inter-subsystem synchronization properties of the nets.
- [tool and example description] The description of the tool and the rudimentary-task demonstration: the single example does not examine whether communication-layer transitions or concurrent subsystem synchronisation are correctly compiled, leaving the central claim that the layering 'introduces a comprehensive description of concurrently acting subsystems' unverified.
minor comments (1)
- The manuscript would benefit from an explicit diagram or small worked example showing how a condition is attached to a transition at the communication layer and how that maps to generated code.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback highlighting both the practical aspects of our methodology and the areas needing clarification. We respond to each major comment below.
read point-by-point responses
-
Referee: [Abstract] Abstract: the claim that the tool 'enables automatic generation of the robot controller code' is load-bearing yet unsupported; no operational semantics are supplied for the hierarchical Petri nets with conditions, nor any argument that the generated code preserves concurrency or inter-subsystem synchronization properties of the nets.
Authors: The manuscript describes a practical tool that performs code generation via structural translation from the five-layer hierarchical Petri net model to controller code, as implemented and shown in the tool and example sections. We agree that no operational semantics or formal preservation arguments are supplied. In revision we will expand the tool description to detail the generation mapping and its handling of concurrency and communication, while noting that a complete formal treatment lies beyond the current scope. revision: partial
-
Referee: [tool and example description] The description of the tool and the rudimentary-task demonstration: the single example does not examine whether communication-layer transitions or concurrent subsystem synchronisation are correctly compiled, leaving the central claim that the layering 'introduces a comprehensive description of concurrently acting subsystems' unverified.
Authors: The provided example illustrates the layer-by-layer construction for a basic task and the resulting generated code. We acknowledge that it does not explicitly verify compilation correctness for communication transitions or subsystem synchronisation. We will revise the manuscript to include additional discussion and, where feasible, annotations in the example showing how the tool maps these elements, thereby better supporting the claim of comprehensive concurrent description. revision: yes
- Formal operational semantics for the hierarchical Petri nets with conditions and proofs that generated code preserves concurrency and synchronization properties.
Circularity Check
Methodology paper introduces layered Petri net representation without circular derivation
full rationale
The paper presents a design methodology decomposing robot systems into five layers (multi-agent, agent, subsystem, behaviour, communication) using hierarchical Petri nets with conditions, extending prior FSM work. No equations, fitted parameters, predictions, or uniqueness theorems appear. The central claims concern organization of development and code generation acceleration via a tool, which are descriptive choices rather than reductions to inputs by construction. Self-citation to previous FSM work is mentioned but not load-bearing for any mathematical result. The derivation chain is self-contained as a representational proposal; no step reduces by definition or self-citation chain.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Such net is created by specifying consecutive layers: multi-agent robot system layer, agent layer, subsystem layer, behaviour layer and communication layer.
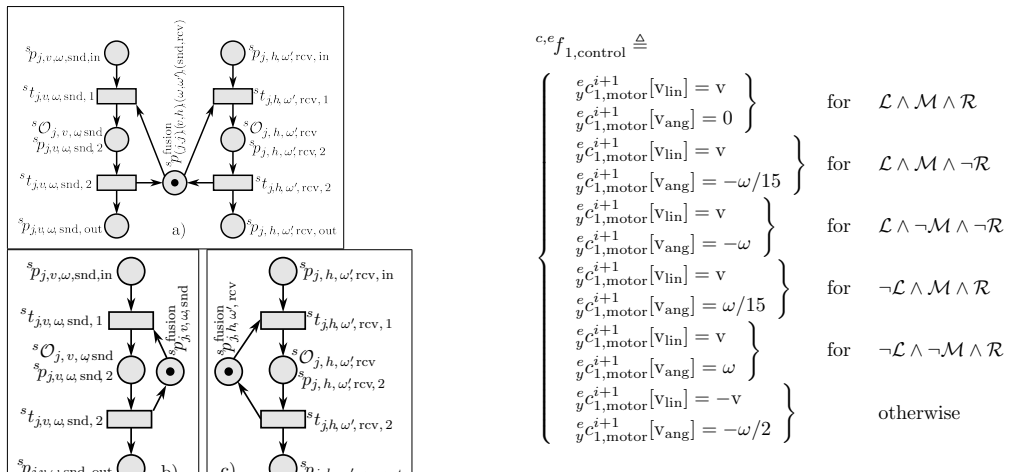
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
A tool was created for producing hierarchical Petri nets defining the model of a robotic system and enabling automatic generation of the robot controller code
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
D. Billington et al. Requirements Engineering via Non- monotonic Logics and State Diagrams. Berlin, Heidelberg, Springer Berlin Heidelberg 2011, pp. 121–135
work page 2011
-
[2]
I. Bluemke. Structural modelling with Petri nets. IFAC Proceedings Volumes, 1997, vol. 30, nr 1, pp. 63 – 68. IFAC Workshop on Manufacturing Systems: Modelling, Manage- ment and Control, Vienna, Austria, 3-5 February
work page 1997
-
[3]
R. A. Brooks. Intelligence without reason. Artificial intelli- gence: critical concepts, 1991, vol. 3, pp. 107–163
work page 1991
-
[4]
E. W. Dijkstra. A discipline of programming. (Prentice-Hall series in automatic computation). Englewood Cliffs: Prentice- Hall
- [5]
-
[6]
C. Girault, V. Rudiger. Petri Nets for Systems Engineering. Springer-Verlag Berlin Heidelberg New York 2003
work page 2003
- [7]
-
[8]
N. R. Jennings, K. Sycara, M. Wooldridge. A roadmap of agent research and development. Autonomous Agents and Multi-Agent Systems, Jan, 1998, vol. 1, nr 1, pp. 7–38
work page 1998
-
[9]
T. Kornuta, C. Zieliński. Robot control system design exem- plified by multi-camera visual servoing. Journal of Intelligent & Robotic Systems, 2013, Vol. 77, No. 3–4, pp. 499–524
work page 2013
-
[10]
J. Luo, H. Ni, M. Zhou. Control Program Design for Automated Guided Vehicle Systems via Petri Nets. IEEE Trans. on Systems, Man, and Cybernetics: Systems, 45(1), pp. 44-55, Jan 2015
work page 2015
-
[11]
D. Kortenkamp, R. Simmons. Robotic systems architectures and programming. In: Springer Handbook of Robotics Ed. O. Khatib, B. Siciliano, pp. 187–206. Springer 2008
work page 2008
-
[12]
L. Montano, F. J. Garc´ ıa, J. L. Villarroel. Using the time Petri net formalism for specification, validation, and code generation in robot-control applications. The International Journal of Robotics Research, 2000, vol. 19, nr 1, pp. 59–76
work page 2000
-
[13]
J. L. Peterson. Petri Net Theory and the Modeling of Systems. Prentice Hall 1981
work page 1981
-
[14]
R. Valk. Essential Features of Petri Nets. Berlin, Heidelberg, Springer Berlin Heidelberg 2003, pp. 9–28
work page 2003
-
[15]
W. Vogler. Modular construction and partial order semantics of Petri nets. 1992
work page 1992
-
[16]
The robot simulator VREP, http://www.coppeliarobotics.com/ accessed: 2018-09-12
work page 2018
-
[17]
M. C. Zhou, F. Dicesare, D. L. Rudolph. Design and Implementation of a Petri Net Based Supervisor for a Flexible Manufacturing System. Automatica, 28(6), pp. 1199-1208, 1992
work page 1992
-
[18]
C. Zieliński, M. Figat, R. Hexel. Communication Within Multi-FSM Based Robotic Systems. Journal of Intelligent & Robotic Systems, Jun, 2018
work page 2018
-
[19]
C. Zieliński, M. Figat, R. Hexel. Robotic Systems Implemen- tation Based on FSMs. In: Automation 2018. Proceedings Ed. R. Szewczyk, C. Zieliński, M. Kaliczyńska. Springer International Publishing, 2018, pp. 441–452
work page 2018
-
[20]
C. Zieliński, T. Winiarski. General specification of multi-robot control system structures. Bulletin of the Polish Academy of Sciences – Technical Sciences, 2010, Vol. 58, No. 1, pp. 15–28
work page 2010
-
[21]
C. Zieliński, M. Figat. Robot System Design Procedure Based on a Formal Specification. In: Recent Advances in Automa- tion, Robotics and Measuring Techniques. Proceedings Ed. R. Szewczyk, C. Zieliński, M. Kaliczyńska. Springer, 2016. vol. 440, series Advances in Intelligent Systems and Computing (AISC), pp. 511–522
work page 2016
-
[22]
C. Zieliński, T. Kornuta, T. Winiarski. A systematic method of designing control systems for service and field robots. In: 19- th IEEE International Conference on Methods and Models in Automation and Robotics, MMAR. Proceedings. IEEE, 2014, pp. 1–14
work page 2014
-
[23]
W. M. Zuberek, I. Bluemke. Hierarchies of place/transition refinements in Petri nets. In: Emerging Technologies and Factory Automation, 1996. EFTA ’96. Proceedings., 1996 IEEE Conference on. Proceedings, Nov, 1996. vol. 1, pp. 355– 360
work page 1996
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.