What Uncertainties Do We Need for Dynamical Systems?
Pith reviewed 2026-06-27 10:18 UTC · model grok-4.3
The pith
Dynamical systems require distinguishing aleatoric from epistemic uncertainty with task-specific objectives.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
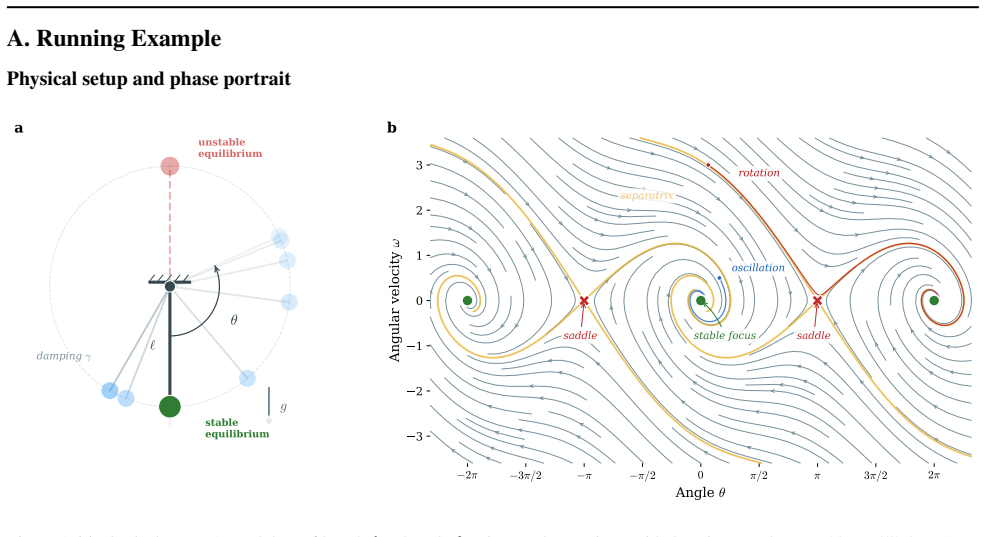
The paper claims that uncertainty modeling for dynamical systems must address multiple sources that fall into aleatoric or epistemic categories, and that the objectives of uncertainty representation and quantification are not fixed but depend on the concrete task, including forecasting, system identification, and control.
What carries the argument
The aleatoric-epistemic uncertainty distinction, separating irreducible randomness from reducible ignorance, applied to sources arising in dynamical systems.
If this is right
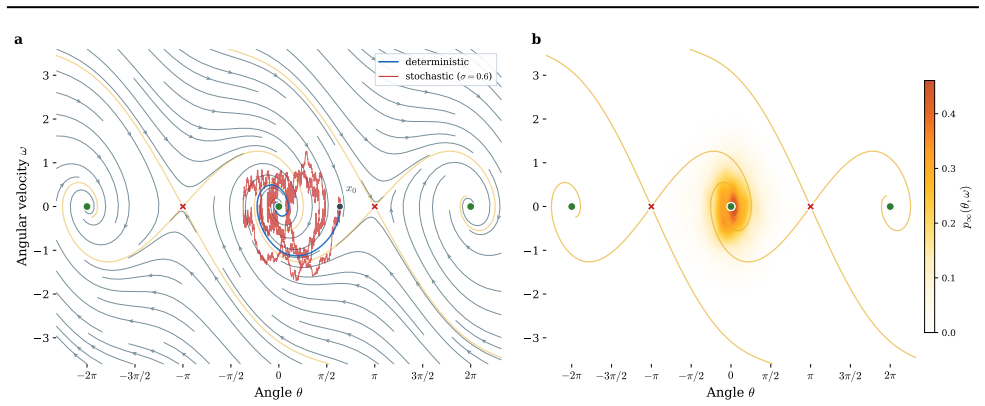
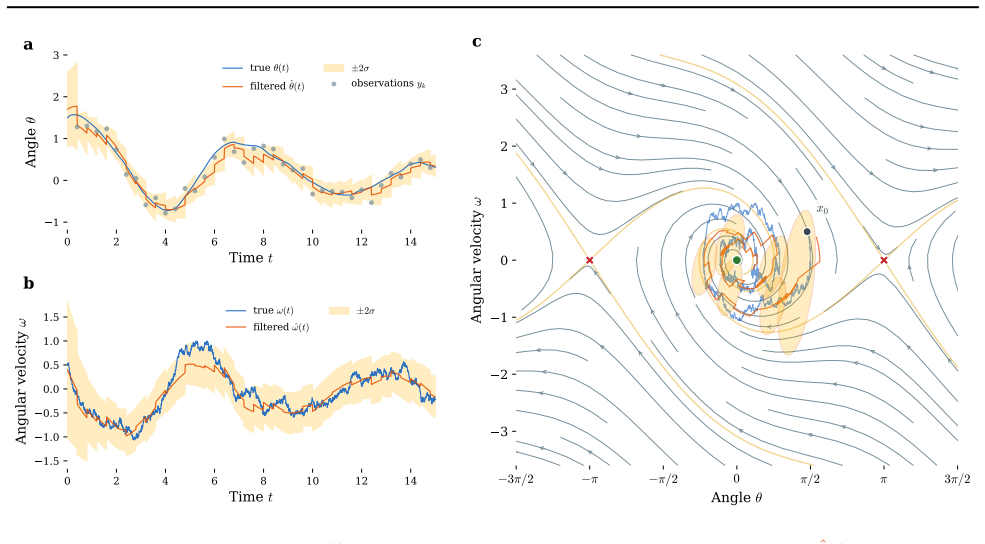
- Prediction tasks require joint quantification of both uncertainty types to produce calibrated trajectory forecasts.
- Control tasks can leverage epistemic uncertainty for exploration or robustness while treating aleatoric uncertainty as a safety constraint.
- System identification primarily targets reduction of epistemic uncertainty through targeted data collection.
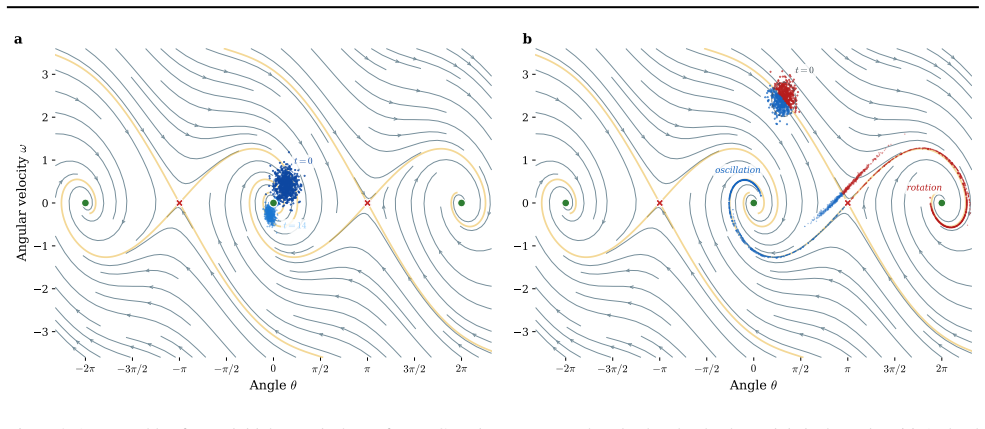
- Generative modeling of system trajectories must capture aleatoric variability to reproduce observed stochasticity.
Where Pith is reading between the lines
- The same distinction may prove useful in related sequential domains such as reinforcement learning or video prediction.
- Empirical benchmarks could measure performance drops when uncertainty types are misclassified in dynamical tasks.
- Hybrid tasks combining prediction and control might benefit from uncertainty representations that adapt their emphasis dynamically.
Load-bearing premise
The aleatoric-epistemic distinction developed for supervised learning transfers to dynamical systems without needing substantial new formal definitions or task-specific redefinitions.
What would settle it
A concrete dynamical system example in which uncertainty sources cannot be classified as aleatoric or epistemic, or in which all tasks share identical uncertainty representation objectives.
Figures
read the original abstract
The distinction between aleatoric and epistemic uncertainty has received considerable attention in machine learning research, mainly in the context of supervised learning but also in other settings such as generative modeling. In this paper, we offer a machine learning perspective on uncertainty modeling for dynamical systems, which has been studied much less so far. In particular, we ask: what uncertainties do we need for dynamical systems? We discuss sources of uncertainty, clarify their nature (aleatoric or epistemic), and consider how the objectives of representing and quantifying uncertainty vary across different tasks.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper offers a machine learning perspective on uncertainty modeling for dynamical systems. It discusses sources of uncertainty, classifies them as aleatoric or epistemic, and examines how the objectives of representing and quantifying uncertainty vary across different tasks.
Significance. As a discussion piece, the work provides an organizing lens for an area that has received less attention than supervised learning. Its value lies in clarifying distinctions and task-specific objectives rather than new theorems, experiments, or quantitative claims; this framing could help structure future research on uncertainty in dynamical systems if the classification proves useful.
Simulated Author's Rebuttal
We thank the referee for their positive summary, recognition of the paper's value as a discussion piece, and recommendation to accept. We appreciate the framing of the work as providing an organizing lens for uncertainty in dynamical systems.
Circularity Check
No significant circularity
full rationale
This is a purely discursive discussion paper with no derivations, equations, fitted parameters, predictions, or quantitative claims. The central content is a qualitative classification of uncertainty sources in dynamical systems using the aleatoric/epistemic distinction as an organizing lens. No load-bearing step reduces to a self-definition, fitted input renamed as prediction, or self-citation chain. The work is self-contained as conceptual analysis and receives the default non-circularity finding.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
˚Astr¨om, K. J. and Murray, R. (2021).Feedback systems: an introduction for scientists and engineers. Princeton University Press. Bansal, S., Chen, M., Herbert, S., and Tomlin, C. J. (2017). Hamilton-Jacobi reachability: A brief overview and re- cent advances. In2017 IEEE 56th Annual Conference on Decision and Control (CDC), pages 2242–2253. IEEE. Bi, K.,...
2021
-
[2]
Bonnet, B., Cipriani, C., Fornasier, M., and Huang, H. (2023). A measure theoretical approach to the mean-field maximum principle for training NeurODEs.Nonlinear Analysis, 227:113161. Brunton, S. L., Proctor, J. L., and Kutz, J. N. (2016a). Dis- covering governing equations from data by sparse identi- fication of nonlinear dynamical systems.Proceedings of...
2023
-
[3]
Dandekar, R., Chung, K., Dixit, V ., Tarek, M., Garcia- Valadez, A., Vemula, K. V ., and Rackauckas, C. (2020). Bayesian neural ordinary differential equations.arXiv preprint arXiv:2012.07244. Deisenroth, M. and Rasmussen, C. E. (2011). PILCO: A model-based and data-efficient approach to policy search. InProceedings of the 28th International Conference on...
arXiv 2020
-
[4]
B., and Rasmussen, C
Frigola, R., Lindsten, F., Sch¨on, T. B., and Rasmussen, C. E. (2013). Bayesian inference and learning in Gaussian pro- cess state-space models with particle MCMC.Advances in Neural Information Processing Systems,
2013
-
[5]
Gneiting, T. and Katzfuss, M. (2014). Probabilistic fore- casting.Annual Review of Statistics and Its Application, 1(1):125–151. Gordon, N. J., Salmond, D. J., and Smith, A. F. (1993). Novel approach to nonlinear/non-Gaussian Bayesian state estimation. InIEE proceedings F (radar and signal pro- cessing), volume 140, pages 107–113. IET. Gruber, C., Schenk,...
arXiv 2014
-
[6]
Haber, E
OpenRe- view.net. Haber, E. and Ruthotto, L. (2017). Stable architectures for deep neural networks.Inverse Problems, 34(1):014004. Hewing, L., Wabersich, K. P., Menner, M., and Zeilinger, M. N. (2020). Learning-based model predictive control: Toward safe learning in control.Annual Review of Con- trol, Robotics, and Autonomous Systems, 3(1):269–296. H¨ulle...
2017
-
[7]
7 Jazwinski, A. H. (2007).Stochastic processes and filtering theory. Courier Corporation. Kalman, R. E. (1960). A new approach to linear filtering and prediction problems.Journal of Basic Engineering, 82(1):35–45. Karniadakis, G. E., Kevrekidis, I. G., Lu, L., Perdikaris, P., Wang, S., and Yang, L. (2021). Physics-informed machine learning.Nature Reviews ...
2007
-
[8]
Kidger, P., Foster, J., Li, X
PMLR. Kidger, P., Foster, J., Li, X. C., and Lyons, T. (2021b). Effi- cient and accurate gradients for neural SDEs.Advances in Neural Information Processing Systems, 34:18747– 18761. Kohl, G., Chen, L.-W., and Thuerey, N. (2026). Bench- marking autoregressive conditional diffusion models for turbulent flow simulation.Neural Networks, 199:108641. Kovachki,...
2026
-
[9]
Krishnan, R. G., Shalit, U., and Sontag, D. (2015). Deep Kalman filters.arXiv preprint arXiv:1511.05121. Li, Q., Chen, L., Tai, C., and E, W. (2018). Maximum principle based algorithms for deep learning.Journal of Machine Learning Research, 18(165):1–29. Li, X., Wong, T.-K. L., Chen, R. T., and Duvenaud, D. (2020). Scalable gradients for stochastic differ...
Pith/arXiv arXiv 2015
-
[10]
Revay, M., Wang, R., and Manchester, I. R. (2024). Recur- rent equilibrium networks: Flexible dynamic models with guaranteed stability and robustness.IEEE Transactions on Automatic Control, 69(5):2855–2870. Risken, H. (1984).The Fokker-Planck Equation: Methods of Solution and Applications, volume 18 ofSpringer Series in Synergetics. Springer-Verlag, Berli...
2024
-
[11]
Sutton, R
Cambridge University Press. Sutton, R. S. and Barto, A. G. (1998).Reinforcement learn- ing: An introduction, volume
1998
-
[12]
Teschl, G
MIT Press Cambridge. Teschl, G. (2012).Ordinary differential equations and dy- namical systems, volume
2012
-
[13]
American Mathematical Soc. Tzen, B. and Raginsky, M. (2019). Neural stochastic dif- ferential equations: Deep latent Gaussian models in the diffusion limit.arXiv preprint arXiv:1905.09883. Walley, P. (1991).Statistical Reasoning with Imprecise Probabilities. Chapman and Hall. Wang, K., Cuzzolin, F., Shariatmadar, K., Moens, D., and Hallez, H. (2025). Cred...
arXiv 2019
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.