SC-MFJ: A Simple Haptic Quality Metric for Medical Image Segmentation
Pith reviewed 2026-06-28 02:37 UTC · model grok-4.3
The pith
SC-MFJ reveals that Gaussian post-processing improves haptic quality of segmentations by a factor of 147 over raw binary outputs, a gap missed by Dice and HD95.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
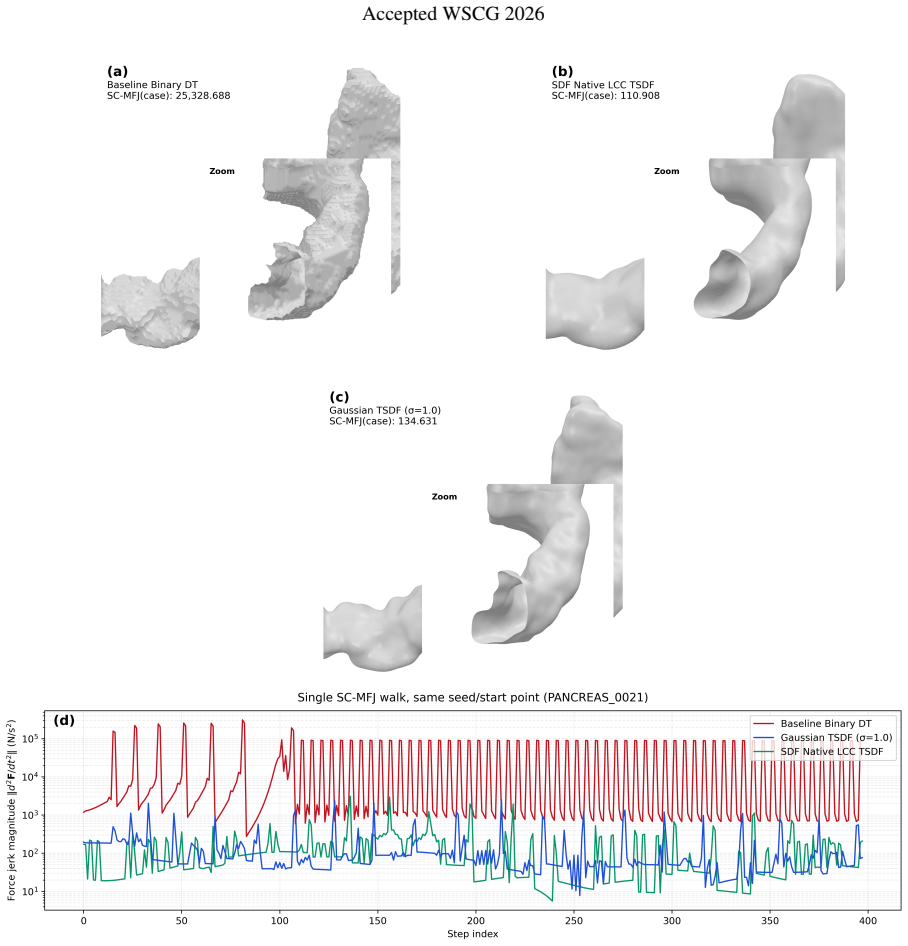
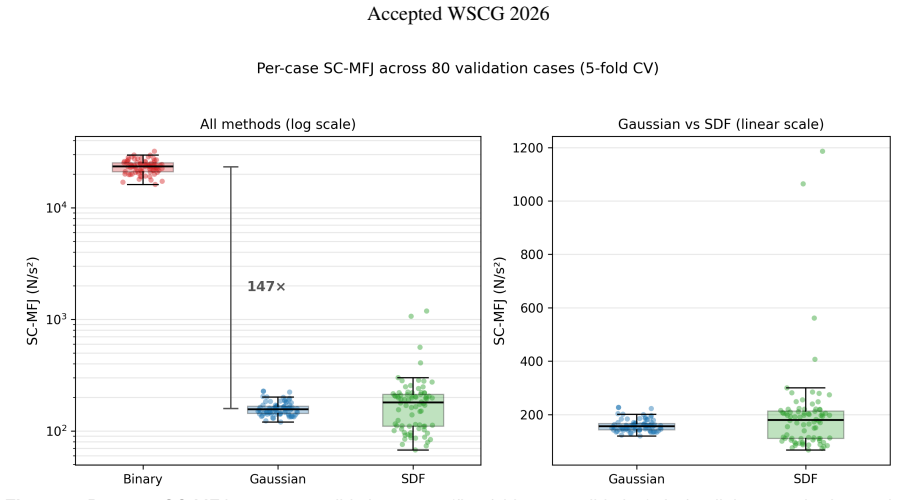
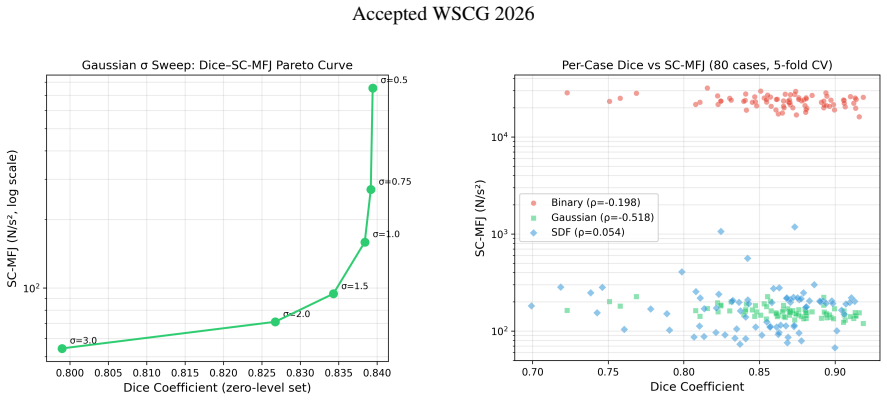
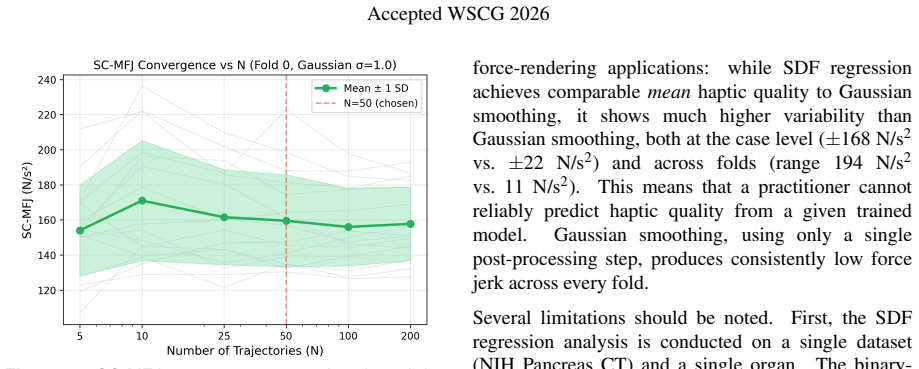
The central discovery is that SC-MFJ, which computes mean force jerk from surface-constrained virtual stylus walks, shows a 147x reduction in jerk for Gaussian-smoothed pancreas segmentations compared to binary outputs across 80 cases, while Dice and HD95 remain insensitive to this difference. On the LiTS liver dataset the gap increases to 189x, and Gaussian smoothing produces lower variability than SDF regression.
What carries the argument
Surface-Constrained Mean Force Jerk (SC-MFJ), which samples the segmented surface with short virtual stylus walks and averages the jerk of computed contact forces.
If this is right
- Simple Gaussian post-processing can deliver markedly better haptic quality than raw binary segmentations for surgical simulation.
- SC-MFJ can detect haptic deficiencies that standard geometric metrics like Dice and HD95 fail to identify.
- Learned SDF regression, while requiring retraining, does not consistently outperform Gaussian smoothing in haptic consistency.
- The findings hold across different organs, as confirmed on the liver dataset with an even larger improvement factor.
Where Pith is reading between the lines
- Segmentation pipelines for haptic applications could benefit from incorporating surface smoothness checks using SC-MFJ during validation.
- Future work might explore using SC-MFJ as an additional training objective to optimize segmentations directly for low force jerk.
- Since the metric runs in about one minute per case, it could be adopted as a standard quality control step in clinical simulation development.
Load-bearing premise
The computed contact forces from virtual stylus walks on the segmented surface accurately reflect the haptic experience in real surgical simulations.
What would settle it
An experiment that measures actual force profiles using a physical haptic device on 3D printed versions of the segmented organs and checks if the jerk values match those predicted by SC-MFJ; significant discrepancy would falsify the metric's relevance.
Figures
read the original abstract
Standard segmentation metrics such as Dice and Hausdorff distance measure geometric overlap but say nothing about whether a segmented surface is suitable for haptic rendering in surgical simulation. We propose SC-MFJ (Surface-Constrained Mean Force Jerk), a simple, inexpensive metric that samples a segmented organ surface with many short virtual stylus walks and measures how jerky the resulting contact forces are. The metric is computed from existing segmentation outputs and uses roughly one minute of CPU time per case. We evaluate three pancreas CT segmentation approaches-binary nnU-Net output, Gaussian-smoothed output, and learned signed distance function (SDF) regression-across 80 cases in five-fold cross-validation. SC-MFJ reveals a 147x gap in haptic quality between the raw binary baseline and simple Gaussian post-processing, a difference entirely invisible to Dice and HD95. It also shows that learned SDF regression, despite requiring full model retraining, produces more variable haptic quality than Gaussian smoothing, with a case-level standard deviation of 168 N/s2 compared with 22 N/s2 for Gaussian. A second evaluation on the LiTS liver dataset (131 cases) confirms the generality of these findings: the binary-to-Gaussian gap widens to 189x, and Gaussian smoothing again produces consistently low force jerk across all folds. Our results suggest that for haptic simulation applications, a one-line post-processing step may be sufficient, and that a cheap metric like SC-MFJ can flag problems that geometric metrics miss.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes SC-MFJ, a metric that samples segmented organ surfaces with short virtual stylus walks and computes mean force jerk to quantify suitability for haptic rendering in surgical simulation. On 80 pancreas CT cases it reports a 147x reduction in force jerk from Gaussian post-processing of nnU-Net binary outputs versus raw binary (invisible to Dice/HD95), with learned SDF regression showing higher case-level variability (std 168 vs 22 N/s²); the pattern is confirmed on 131 LiTS liver cases with a 189x gap. The metric is presented as inexpensive (~1 min CPU per case) and computed from existing outputs.
Significance. If the simulated jerk statistics prove predictive of real haptic feedback, SC-MFJ would fill a genuine gap left by geometric metrics for simulation-oriented segmentation. The computational simplicity and consistent behavior across two datasets are strengths; the work also correctly notes that a trivial post-processing step can dominate more complex learned alternatives on this axis.
major comments (2)
- [§3] §3: The contact-force model, stylus trajectory sampling, and jerk aggregation are defined without calibration to any physical haptic device (e.g., measured forces on a Phantom or Omega interface) or correlation with surgeon perception ratings of the same surfaces; this assumption is load-bearing for the central claim that the 147×/189× numerical gap constitutes a difference in 'haptic quality' rather than an artifact of the chosen simulation.
- [Evaluation sections] Evaluation sections (pancreas and LiTS): no statistical significance tests, confidence intervals, or ablation on sampling density/length are reported for the headline force-jerk ratios, leaving open whether the reported gaps are robust to reasonable variations in the virtual-stylus parameters.
minor comments (2)
- [Abstract, §3] Abstract and §3: the precise definition of 'mean force jerk' (units, aggregation over walks, handling of contact discontinuities) should be stated explicitly rather than summarized.
- The manuscript would benefit from a short limitations paragraph acknowledging that SC-MFJ currently measures a simulation proxy rather than validated perceptual quality.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address the two major comments point-by-point below and will revise the manuscript to incorporate clarifications and additional analyses where feasible.
read point-by-point responses
-
Referee: [§3] §3: The contact-force model, stylus trajectory sampling, and jerk aggregation are defined without calibration to any physical haptic device (e.g., measured forces on a Phantom or Omega interface) or correlation with surgeon perception ratings of the same surfaces; this assumption is load-bearing for the central claim that the 147×/189× numerical gap constitutes a difference in 'haptic quality' rather than an artifact of the chosen simulation.
Authors: We agree this is a substantive limitation. SC-MFJ is a simulation-derived proxy that quantifies jerk under a specific contact-force model; without device calibration or perceptual studies, the 147×/189× gaps demonstrate differences in simulated force smoothness rather than proven real-world haptic quality. We will revise the methods and discussion sections to state this assumption explicitly, frame SC-MFJ as a comparative screening tool, and list empirical validation against physical interfaces and surgeon ratings as required future work. The metric's value for exposing post-processing effects invisible to Dice/HD remains intact under the simulation. revision: partial
-
Referee: [Evaluation sections] Evaluation sections (pancreas and LiTS): no statistical significance tests, confidence intervals, or ablation on sampling density/length are reported for the headline force-jerk ratios, leaving open whether the reported gaps are robust to reasonable variations in the virtual-stylus parameters.
Authors: We accept this criticism. The revised manuscript will report bootstrap 95% confidence intervals on the mean force-jerk values and ratios for both datasets. We will also add paired statistical tests (e.g., Wilcoxon signed-rank) across the 80 pancreas and 131 liver cases to assess whether the observed gaps are significant. Finally, we will include a parameter ablation varying stylus walk length and sampling density to confirm the headline ratios are stable under reasonable perturbations of the virtual-stylus settings. revision: yes
Circularity Check
No significant circularity; metric defined and evaluated independently
full rationale
The paper introduces SC-MFJ as an explicit computational procedure (surface sampling via virtual stylus walks, contact force model, mean jerk aggregation) applied to existing segmentation outputs. Evaluations on pancreas CT (80 cases, 5-fold CV) and LiTS (131 cases) are direct applications of this definition to external data, with comparisons to Dice/HD95 also computed independently. No parameters are fitted to the target results and then relabeled as predictions, no self-citations are invoked as load-bearing uniqueness theorems, and no ansatz or renaming reduces the central claim to its inputs by construction. The derivation chain is self-contained against the stated external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Jerk is a suitable measure of haptic quality
Reference graph
Works this paper leans on
-
[1]
The Liver Tumor Segmentation Benchmark (LiTS)
Bilic, P., Christ, P., Li, H.B., Vorontsov, E., et al. The Liver Tumor Segmentation Benchmark (LiTS). Medical Image Analysis, 84, p.102680, 2023
2023
-
[2]
High-fidelity haptic and visual rendering for patient-specific simulation of temporal bone surgery
Chan, S., Li, P., Locketz, G., Salisbury, K., and Blevins, N.H. High-fidelity haptic and visual rendering for patient-specific simulation of temporal bone surgery. Computer Assisted Surgery, 21(1), pp.85--101, 2016
2016
-
[3]
and Brown, J.M
Colgate, J.E. and Brown, J.M. Factors affecting the Z-width of a haptic display. In Proc.\ IEEE Int.\ Conf.\ Robotics and Automation (ICRA), pp.3205--3210, 1994
1994
-
[4]
On the development of objective metrics for surgical skills evaluation based on tool motion
Estrada, S., O'Malley, M.K., Duran, C., Schulz, D.G., and Bismuth, J. On the development of objective metrics for surgical skills evaluation based on tool motion. In Proc.\ IEEE Int.\ Conf.\ Systems, Man, and Cybernetics, pp.3144--3149, 2014
2014
-
[5]
and Hogan, N
Flash, T. and Hogan, N. The coordination of arm movements: An experimentally confirmed mathematical model. Journal of Neuroscience, 5(7), pp.1688--1703, 1985
1985
-
[6]
Optimized image-based soft tissue deformation algorithms for visualization of haptic needle insertion
Fortmeier, D., Mastmeyer, A., and Handels, H. Optimized image-based soft tissue deformation algorithms for visualization of haptic needle insertion. Studies in Health Technology and Informatics, 184, pp.136--140, 2013
2013
-
[7]
nnU-Net: a self-configuring method for deep learning-based biomedical image segmentation
Isensee, F., Jaeger, P.F., Kohl, S.A.A., Petersen, J., and Maier-Hein, K.H. nnU-Net: a self-configuring method for deep learning-based biomedical image segmentation. Nature Methods, 18(2), pp.203--211, 2021
2021
-
[8]
and Otaduy, M.A
Lin, M.C. and Otaduy, M.A. Haptic Rendering: Foundations, Algorithms, and Applications. A K Peters, 2008
2008
-
[9]
and Cline, H.E
Lorensen, W.E. and Cline, H.E. Marching Cubes: A high resolution 3D surface construction algorithm. ACM SIGGRAPH Computer Graphics, 21(4), pp.163--169, 1987
1987
-
[10]
How distance transform maps boost segmentation CNNs: An empirical study
Ma, J., Wei, Z., Zhang, Y., Wang, Y., et al. How distance transform maps boost segmentation CNNs: An empirical study. In Proc.\ Medical Imaging with Deep Learning (MIDL), pp.479--492, 2020
2020
-
[11]
Metrics reloaded: recommendations for image analysis validation
Maier-Hein, L., Reinke, A., Godau, P., Tizabi, M.D., et al. Metrics reloaded: recommendations for image analysis validation. Nature Methods, 21(2), pp.195--212, 2024
2024
-
[12]
Anisotropic diffusion for direct haptic volume rendering in lumbar puncture simulation
Mastmeyer, A., Fortmeier, D., and Handels, H. Anisotropic diffusion for direct haptic volume rendering in lumbar puncture simulation. In Proc.\ Bildverarbeitung f\" u r die Medizin (BVM) , pp.286--291, 2012
2012
-
[13]
Ray-casting-based evaluation framework for needle insertion force feedback algorithms
Mastmeyer, A., Hecht, T., Fortmeier, D., and Handels, H. Ray-casting-based evaluation framework for needle insertion force feedback algorithms. In Proc.\ Bildverarbeitung f\" u r die Medizin (BVM) , pp.3--8, 2013
2013
-
[14]
Clinically applicable segmentation of head and neck anatomy for radiotherapy: deep learning algorithm development and validation study
Nikolov, S., Blackwell, S., Zverovitch, A., Mendes, R., et al. Clinically applicable segmentation of head and neck anatomy for radiotherapy: deep learning algorithm development and validation study. Journal of Medical Internet Research, 23(7), p.e26151, 2021
2021
-
[15]
o , F., Olsson, P., Malmberg, F., Carlbom, I.B., and Nystr\
Nysj\" o , F., Olsson, P., Malmberg, F., Carlbom, I.B., and Nystr\" o m, I. Using anti-aliased signed distance fields for generating surgical guides and plates from CT images. Journal of WSCG, 25(1), pp.11--20, 2017
2017
-
[16]
Comparison of algorithms for haptic interaction with isosurfaces extracted from volumetric datasets
Rizzi, S.H., Luciano, C.J., and Banerjee, P. Comparison of algorithms for haptic interaction with isosurfaces extracted from volumetric datasets. ASME J.\ Comput.\ Inf.\ Sci.\ Eng., 12(2), p.021004, 2012
2012
-
[17]
DeepOrgan: Multi-level deep convolutional networks for automated pancreas segmentation
Roth, H.R., Lu, L., Farag, A., Shin, H.-C., Liu, J., Turkbey, E.B., and Summers, R.M. DeepOrgan: Multi-level deep convolutional networks for automated pancreas segmentation. In Proc.\ MICCAI, pp.556--564, 2015
2015
-
[18]
Measuring hand movement for suturing skill assessment: A simulation-based study
Shayan, A.M., Singh, S., Gao, J., et al. Measuring hand movement for suturing skill assessment: A simulation-based study. Surgery, 174(5), pp.1184--1192, 2023
2023
-
[19]
clDice---A novel topology-preserving loss function for tubular structure segmentation
Shit, S., Paetzold, J.C., Sekuboyina, A., et al. clDice---A novel topology-preserving loss function for tubular structure segmentation. In Proc.\ IEEE/CVF Conf.\ Computer Vision and Pattern Recognition (CVPR), pp.16560--16569, 2021
2021
-
[20]
Shape-aware organ segmentation by predicting signed distance maps
Xue, Y., Tang, H., Qiao, Z., et al. Shape-aware organ segmentation by predicting signed distance maps. In Proc.\ AAAI Conference on Artificial Intelligence, pp.12565--12572, 2020
2020
-
[21]
StEik: Stabilizing the optimization of neural signed distance functions and finer shape representation
Yang, H., Sun, Y., Sundaramoorthi, G., and Yezzi, A. StEik: Stabilizing the optimization of neural signed distance functions and finer shape representation. In Advances in Neural Information Processing Systems (NeurIPS), pp.13993--14004, 2023
2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.