Gauge Freedom Optimization for Truncation Error Reduction in Inertial Navigation
Pith reviewed 2026-06-27 02:23 UTC · model grok-4.3
The pith
The u-space methodology generalizes gauge freedom to reduce truncation error in inertial navigation without knowing the forcing function analytically.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The u-space methodology generalizes the gauge freedom in the variation of parameters technique to systems with unknown forcing functions, with the optimal gauge derived in closed form for second-order systems and in closed and empirical form for first-order systems, yielding consistent truncation error reduction across Monte Carlo simulations and a real-world inertial navigation dataset.
What carries the argument
The u-space methodology, a novel state mapping that generalizes gauge freedom optimization to unknown forcing functions while preserving dynamics.
If this is right
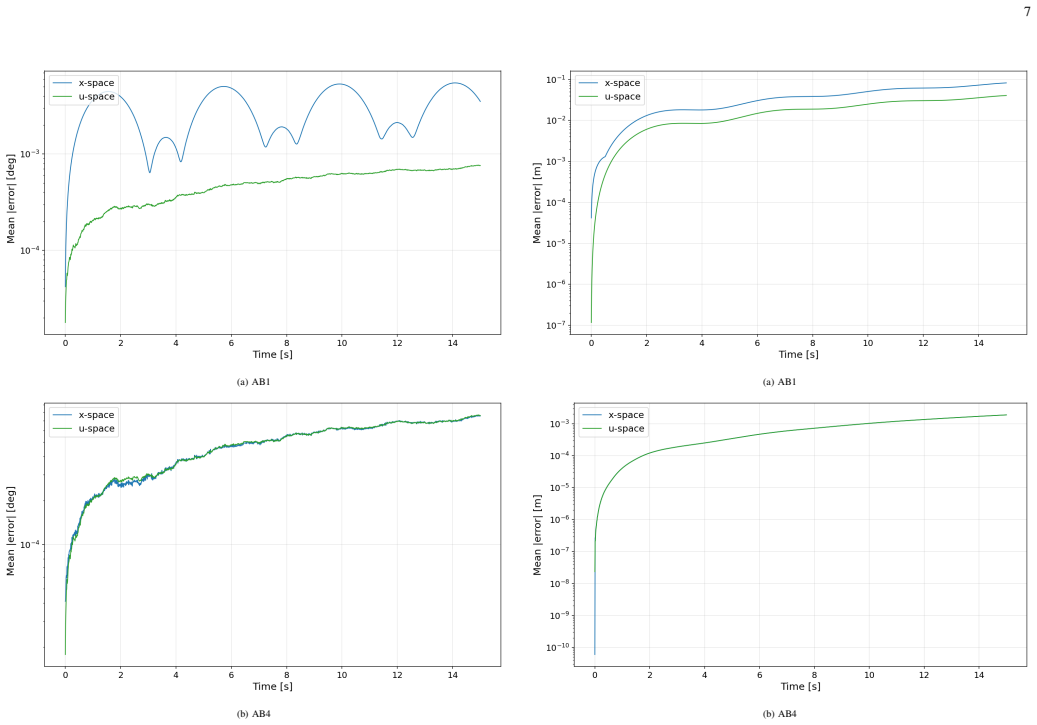
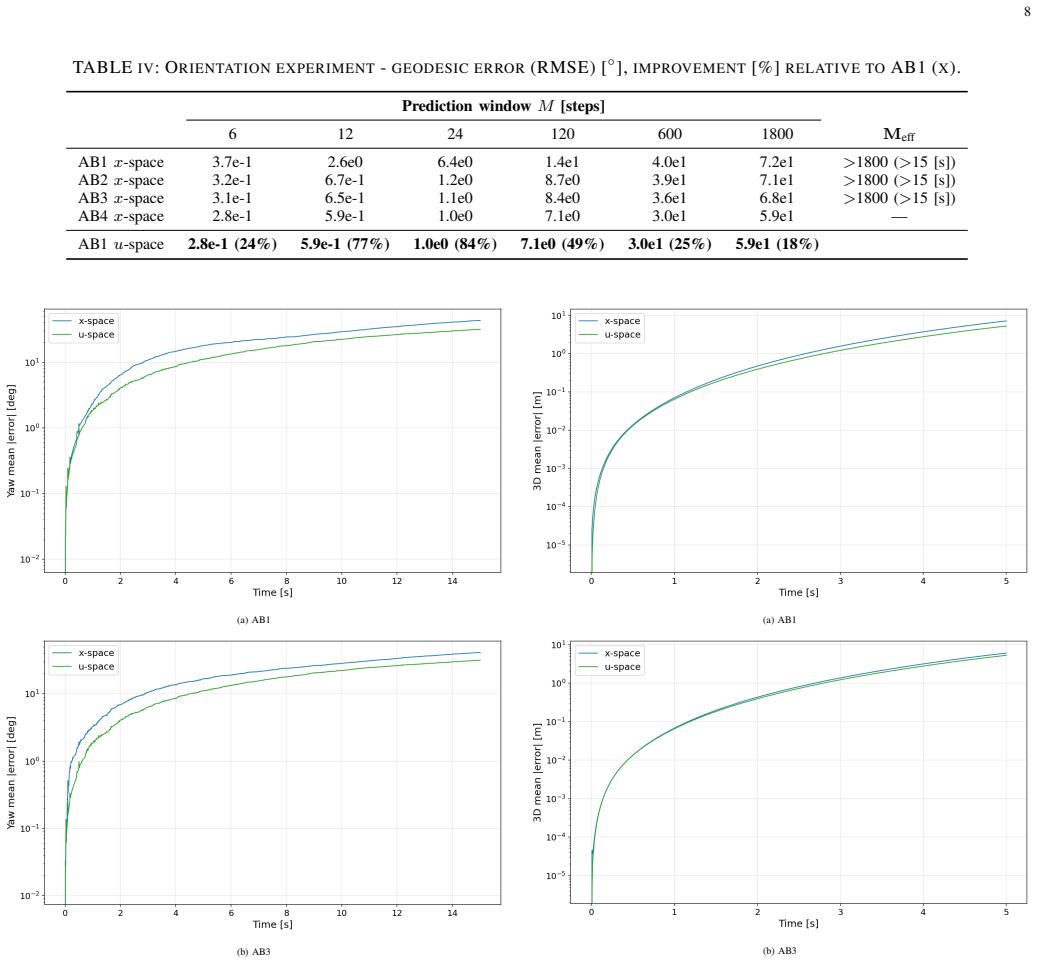
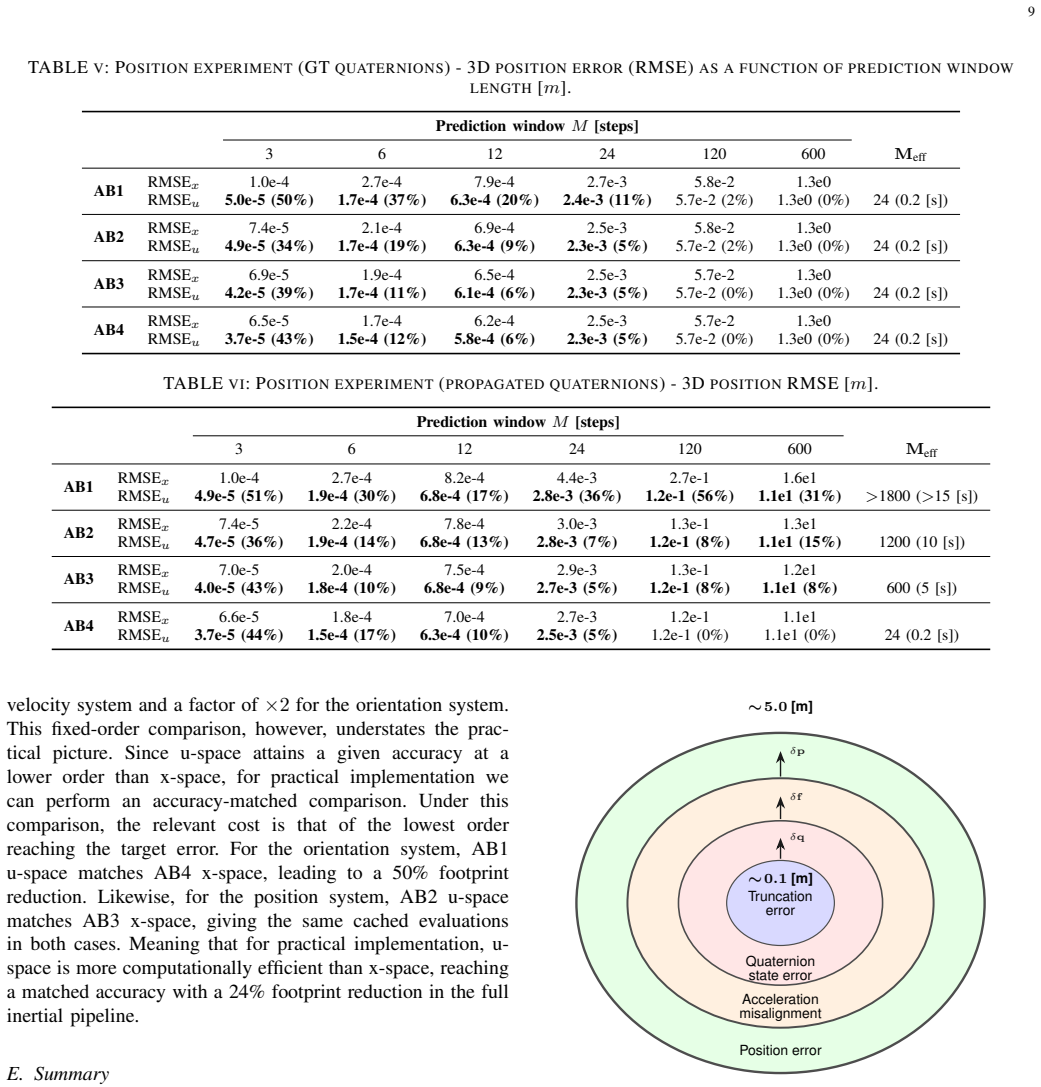
- Consistent truncation error reduction is achieved across four forcing functions, five sensor grades, and four Adams-Bashforth orders in Monte Carlo simulations.
- Largest gains are observed in the full inertial mechanization pipeline.
- The approach is applicable to high-grade inertial systems where truncation error is a larger part of the error budget and to aided low-cost systems with short propagation intervals.
Where Pith is reading between the lines
- Similar state mappings could be developed for other classes of differential equations in engineering applications beyond navigation.
- The method might enable the use of lower-order integrators to achieve accuracy levels previously requiring higher orders.
- Real-time implementation could adapt the gauge choice based on sensor data characteristics.
Load-bearing premise
That a state mapping exists which allows the optimal gauge to be computed without any analytical knowledge of the forcing function while preserving the underlying dynamics and without introducing new instabilities or bias in the integrated states.
What would settle it
If the u-space derived optimal gauge fails to reduce truncation error comparably to the analytical gauge on a system where the forcing function is known, or if it introduces bias in the integrated states on real inertial data.
Figures
read the original abstract
Numerical integration plays a central role in inertial navigation systems, where sensor measurements are propagated through time to obtain orientation, velocity, and position states. The accuracy of this propagation depends on the numerical integrator type, order and step-size. Prior work showed that for second-order systems with known forcing functions, the gauge freedom in the variation of parameters technique can be exploited to reduce truncation error without modifying the integrator. However, this approach requires analytical knowledge of the forcing function, limiting its applicability in real-world systems. To address this limitation we propose the u-space methodology, a novel state mapping that generalizes the gauge freedom to systems with unknown forcing functions. The optimal gauge is derived in closed form for second-order systems and in both closed and empirical form for first-order systems. The proposed approach was evaluated through Monte Carlo simulations across four forcing functions, five sensor grades, and four Adams-Bashforth orders, as well as on a real-world inertial navigation dataset. Results show consistent error reduction across all tested conditions, with the largest gains observed in the full inertial mechanization pipeline, making the approach applicable to high-grade inertial systems, where truncation error constitutes a larger share of the error budget, and to aided low-cost systems with high-rate updates, where propagation spans only short inter-update intervals.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims that the u-space methodology generalizes the gauge freedom in the variation of parameters technique to inertial navigation systems with unknown forcing functions. The optimal gauge is derived in closed form for second-order systems and in both closed and empirical forms for first-order systems. Monte Carlo simulations across four forcing functions, five sensor grades, and four Adams-Bashforth orders, together with evaluation on a real-world inertial navigation dataset, are reported to show consistent truncation error reduction, with the largest gains in the full inertial mechanization pipeline.
Significance. If the u-space mapping is shown to exactly preserve the original dynamics without reference to forcing statistics and without introducing bias or instability, the approach would address a practical limitation of prior gauge-optimization methods and could be useful for reducing truncation error in both high-grade INS and short-interval aided low-cost systems. The breadth of the Monte Carlo conditions and the inclusion of real data provide empirical support for the claimed error reductions.
major comments (2)
- [u-space derivation / methods] The load-bearing step is the construction of the u-space state mapping (methods/derivation section). The manuscript must explicitly show that this mapping (a) encodes the gauge freedom without any dependence on the forcing function, (b) leaves the underlying differential equation unchanged, and (c) produces no additional instability or systematic bias in the integrated states. The skeptic concern that any hidden dependence on forcing statistics would invalidate the “unknown forcing” generalization remains unaddressed until this equivalence is demonstrated analytically or via a direct trajectory comparison.
- [first-order empirical gauge] For the empirical gauge form in first-order systems, the free parameter(s) must be shown to be determined independently of the evaluation data. If the empirical form is obtained by fitting on the same Monte Carlo or real-world trajectories used to claim improvement, the reported error reductions risk circularity; the paper should report separate fitting and test sets or a parameter-free justification.
minor comments (2)
- [Abstract] The abstract states that closed-form expressions exist but does not display them; adding the explicit optimal-gauge formulas (even in a compact form) would make the central contribution immediately verifiable.
- [Figures / Tables] Figure captions and table headers should explicitly state the error metric (e.g., position RMSE, attitude error) and the exact conditions (forcing function, sensor grade, integrator order) for each plotted or tabulated result.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on the u-space methodology. We address each major comment below, providing clarifications from the manuscript and proposing targeted revisions to strengthen the presentation of the derivation and empirical gauge selection.
read point-by-point responses
-
Referee: [u-space derivation / methods] The load-bearing step is the construction of the u-space state mapping (methods/derivation section). The manuscript must explicitly show that this mapping (a) encodes the gauge freedom without any dependence on the forcing function, (b) leaves the underlying differential equation unchanged, and (c) produces no additional instability or systematic bias in the integrated states. The skeptic concern that any hidden dependence on forcing statistics would invalidate the “unknown forcing” generalization remains unaddressed until this equivalence is demonstrated analytically or via a direct trajectory comparison.
Authors: The u-space mapping is constructed in the methods section by reparameterizing the state vector to incorporate the gauge parameter as a free variable in the variation-of-parameters framework, with the transformation defined solely through the homogeneous solution basis and without reference to any particular forcing function. This ensures (a) independence from forcing statistics. Because the mapping is a linear state transformation that leaves the original second- or first-order differential operator invariant, the underlying equation remains unchanged (b). We will add an explicit analytical equivalence proof together with side-by-side trajectory comparisons (original versus u-space) across the four forcing functions already used in the Monte Carlo study; these comparisons will quantify any residual bias or instability, which the existing error-reduction results suggest are absent. revision: yes
-
Referee: [first-order empirical gauge] For the empirical gauge form in first-order systems, the free parameter(s) must be shown to be determined independently of the evaluation data. If the empirical form is obtained by fitting on the same Monte Carlo or real-world trajectories used to claim improvement, the reported error reductions risk circularity; the paper should report separate fitting and test sets or a parameter-free justification.
Authors: The empirical gauge for first-order systems is obtained by minimizing a truncation-error bound derived from the local truncation-error expression of the Adams-Bashforth integrator; the optimization depends only on the integrator coefficients and the assumed form of the gauge function, not on any particular trajectory. To eliminate any appearance of circularity we will document that the empirical parameters were fitted on an independent collection of synthetic trajectories (distinct from both the Monte Carlo test set and the real-world dataset) and will report the fitting and evaluation partitions explicitly. revision: yes
Circularity Check
No circularity: u-space mapping and gauge derivation presented as independent of evaluation data
full rationale
The abstract describes a novel state mapping that generalizes prior gauge freedom results to unknown forcing functions, with optimal gauges derived in closed form (second-order) or closed/empirical form (first-order). Evaluation via Monte Carlo simulations across multiple forcing functions, sensor grades, and integrator orders plus a real-world dataset is presented strictly as validation of error reduction. No equations, self-citations, or statements in the provided text indicate that the mapping or gauge derivations are constructed from or fitted to the same data used for the reported improvements, nor do they reduce the central claim to a renaming or self-referential definition. The derivation chain therefore remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
free parameters (1)
- empirical gauge parameter(s) for first-order systems
axioms (1)
- domain assumption A state mapping (u-space) exists that allows gauge optimization without analytical knowledge of the forcing function while exactly preserving the original second-order dynamics.
invented entities (1)
-
u-space state mapping
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Ogata,Modern Control Engineering
K. Ogata,Modern Control Engineering. Prentice hall, 2010
2010
-
[2]
The Calculation of Robot Dynamics Using Articulated-body Inertias,
R. Featherstone, “The Calculation of Robot Dynamics Using Articulated-body Inertias,”The International Journal of Robotics Re- search, vol. 2, no. 1, pp. 13–30, 1983
1983
-
[3]
Ordinary Differential Equation- based MIMO Signal Detection,
A. Nakai-Kasai and T. Wadayama, “Ordinary Differential Equation- based MIMO Signal Detection,”IEEE Transactions on Signal Pro- cessing, vol. 72, pp. 4147–4162, 2024
2024
-
[4]
Computer
L. Verlet, “Computer ”Experiments” on Classical Fluids. I. Thermody- namical Properties of Lennard-Jones Molecules,”Physical Review, vol. 159, no. 1, p. 98, 1967
1967
-
[5]
Validation and Performance Evaluation of a Simulink Inertial Navigation System Simulator,
R. Giroux, B. Leach, R. Landry Jr, and R. Gourdeau, “Validation and Performance Evaluation of a Simulink Inertial Navigation System Simulator,”Canadian Aeronautics and Space Journal, vol. 49, no. 4, pp. 149–161, 2003
2003
-
[6]
IMUNet: Efficient Regres- sion Architecture for Inertial IMU Navigation and Positioning,
B. Zeinali, H. Zanddizari, and M. J. Chang, “IMUNet: Efficient Regres- sion Architecture for Inertial IMU Navigation and Positioning,”IEEE Transactions on Instrumentation and Measurement, vol. 73, pp. 1–13, 2024
2024
-
[7]
Deep-learning-assisted Inertial Dead Reckoning and Fusion,
D. Hurwitz, N. Cohen, and I. Klein, “Deep-learning-assisted Inertial Dead Reckoning and Fusion,”IEEE Transactions on Instrumentation and Measurement, vol. 74, pp. 1–9, 2024
2024
-
[8]
J. C. Butcher,Numerical Methods for Ordinary Differential Equations. John Wiley & Sons, 2016
2016
-
[9]
Iserles,A First Course in the Numerical Analysis of Differential Equations
A. Iserles,A First Course in the Numerical Analysis of Differential Equations. Cambridge University Press, 2009, no. 44
2009
-
[10]
A Family of Embedded Runge-Kutta Formulae,
J. R. Dormand and P. J. Prince, “A Family of Embedded Runge-Kutta Formulae,”Journal of Computational and Applied Mathematics, vol. 6, no. 1, pp. 19–26, 1980
1980
-
[11]
Bashforth and J
F. Bashforth and J. C. Adams,An Attempt to Test the Theories of Capillary Action by Comparing the Theoretical and Measured Forms of Drops of Fluid. University Press, 1883
-
[12]
Titterton,Strapdown Inertial Navigation Technology
D. Titterton,Strapdown Inertial Navigation Technology. The Institution of Engineering and Technology, 2004
2004
-
[13]
Convergence and Stability in the Numerical Integration of Ordinary Differential Equations,
G. Dahlquist, “Convergence and Stability in the Numerical Integration of Ordinary Differential Equations,”Mathematica Scandinavica, pp. 33– 53, 1956
1956
-
[14]
Autonomous Navigation Systems in GPS-denied Envir- onments: A Review of Techniques and Applications,
S. Alghamdi, S. Alahmari, S. Yonbawi, K. Alsaleem, F. Ateeq, and F. Almushir, “Autonomous Navigation Systems in GPS-denied Envir- onments: A Review of Techniques and Applications,” in2025 11th International Conference on Automation, Robotics, and Applications (ICARA). IEEE, 2025, pp. 290–299
2025
-
[15]
Nonlinearity-aware ZUPT- aided Pedestrian Inertial Navigation Based on Cubature Kalman Filter in Urban Canyons,
R. Xu, S. Chen, S. Bai, and W. Wen, “Nonlinearity-aware ZUPT- aided Pedestrian Inertial Navigation Based on Cubature Kalman Filter in Urban Canyons,”IEEE Transactions on Instrumentation and Meas- urement, vol. 73, pp. 1–15, 2024
2024
-
[16]
The Approximate Arithmetical Solution by Finite Differences of Physical Problems Involving Differential Equations, with an Application to the Stresses in a Masonry Dam,
L. F. Richardson, “The Approximate Arithmetical Solution by Finite Differences of Physical Problems Involving Differential Equations, with an Application to the Stresses in a Masonry Dam,”Philosophical Transactions of the Royal Society of London. Series A, Containing Papers of a Mathematical or Physical Character, vol. 210, no. 459- 470, pp. 307–357, 1911
1911
-
[17]
Simplified Numerical Integration,
W. Romberg, “Simplified Numerical Integration,”Norske Vid. Selsk. Forh., vol. 28, pp. 30–36, 1955
1955
-
[18]
Adaptive Stepsize Control for Extrapolation Semi-implicit Multistep ODE Solvers,
D. Butusov, “Adaptive Stepsize Control for Extrapolation Semi-implicit Multistep ODE Solvers,”Mathematics, vol. 9, no. 9, p. 950, 2021
2021
-
[19]
Symplectic Integrators for Hamiltonian Problems: an Overview,
J. M. Sanz-Serna, “Symplectic Integrators for Hamiltonian Problems: an Overview,”Acta Numerica, vol. 1, pp. 243–286, 1992
1992
-
[20]
Numerical Aspects of Inertial Navigation,
M. Papez and P. Pivonka, “Numerical Aspects of Inertial Navigation,” IFAC Proceedings Volumes, vol. 46, no. 28, pp. 262–267, 2013
2013
-
[21]
IMU Hand Calibration for Low-cost MEMS Inertial Sensors,
H. Al Jlailaty, A. Celik, M. M. Mansour, and A. M. Eltawil, “IMU Hand Calibration for Low-cost MEMS Inertial Sensors,”IEEE Transactions on Instrumentation and Measurement, vol. 72, pp. 1–16, 2023
2023
-
[22]
Exponential Integrators,
M. Hochbruck and A. Ostermann, “Exponential Integrators,”Acta Nu- merica, vol. 19, pp. 209–286, 2010
2010
-
[23]
The Magnus Expansion and Some of Its Applications,
S. Blanes, F. Casas, J.-A. Oteo, and J. Ros, “The Magnus Expansion and Some of Its Applications,”Physics Reports, vol. 470, no. 5-6, pp. 151–238, 2009
2009
-
[24]
Mitigating the Integration Error in Numerical Simulations of Newtonian Systems,
P. Gurfil and I. Klein, “Mitigating the Integration Error in Numerical Simulations of Newtonian Systems,”International Journal for Numer- ical Methods in Engineering, vol. 68, no. 2, pp. 267–297, 2006
2006
-
[25]
Stabilizing the Explicit Euler Integration of Stiff and Undamped Linear Systems,
——, “Stabilizing the Explicit Euler Integration of Stiff and Undamped Linear Systems,”Journal of Guidance, Control, and Dynamics, vol. 30, no. 6, pp. 1659–1667, 2007
2007
-
[26]
W. E. Boyce, R. C. DiPrima, and D. B. Meade,Elementary Differential Equations and Boundary Value Problems. John Wiley & Sons, 2021
2021
-
[27]
Tenenbaum and H
M. Tenenbaum and H. Pollard,Ordinary Differential Equations: an Elementary Textbook for Students of Mathematics, Engineering, and the Sciences. Courier Corporation, 1985
1985
-
[28]
E. A. Coddington, N. Levinson, and T. Teichmann,Theory of Ordinary Differential Equations. American Institute of Physics, 1956
1956
-
[29]
Farrell,Aided Navigation: GPS with High Rate Sensors
J. Farrell,Aided Navigation: GPS with High Rate Sensors. McGraw- Hill, Inc., 2008
2008
-
[30]
P. D. Groves,Principles of GNSS Inertial and Multi-Sensor Integrated Navigation Systems - GNSS Technology and Applications. Norwood, MA, USA: Artech House, 2015
2015
-
[31]
Multiple and Gyro-free Inertial Datasets,
Z. Yampolsky, Y . Stolero, N. Pri-Hadash, D. Solodar, S. Massas, I. Savin, and I. Klein, “Multiple and Gyro-free Inertial Datasets,”Scientific Data, vol. 11, no. 1, p. 1080, 2024
2024
-
[32]
Xsens DOT,
“Xsens DOT,” https://www.movella.com/products/wearables/movella-d ot, [Accessed Jun. 15, 2026]
2026
-
[33]
Inertial Labs,
“Inertial Labs,” https://inertiallabs.com/products/mru-ws-motion-refer ence-units-and-wave-sensors/, [Accessed Jun. 15, 2026]
2026
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.