Travel-time tomography from mean field game dynamics
Pith reviewed 2026-05-20 17:51 UTC · model grok-4.3
The pith
Mean field games recast travel-time tomography as an active inverse problem where population dynamics encode an unknown spatial cost field.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By placing the unknown environment inside the running cost of a mean field game, the equilibrium population density and momentum fields become observations that encode the cost field. The model unifies propagation, observation, and inversion in a single PDE-constrained optimization problem. The inverse problem differs from passive tomography because kinetic, congestion, and environmental terms are linked through local weights that vary in space and time. A two-stage numerical method that begins with a diffusion approximation and then refines with the full game dynamics recovers the cost field reliably in experiments even under noise and across different scene families.
What carries the argument
The mean field game system of coupled Hamilton-Jacobi-Bellman and Fokker-Planck equations, with the unknown spatial cost field entering the running cost and observations extracted from the resulting equilibrium density and flow fields.
If this is right
- The inverse problem differs structurally from passive tomography because kinetic, congestion, and environmental effects couple through space- and time-dependent local weights rather than fixed global coefficients.
- A two-stage inversion pipeline that initializes with diffusion and refines with the full mean field game achieves stable recovery of the cost field under noise.
- The framework applies to active tomography settings that arise in biological transport, vascular flow, and subsurface groundwater dynamics.
- Observations from multiple channels can be incorporated directly into the same PDE-constrained model.
Where Pith is reading between the lines
- The local-weight coupling mechanism might suggest new regularization strategies for other inverse problems that involve interacting agents.
- The same modeling strategy could be tested on real traffic or crowd data to check whether the recovered cost fields match independent measurements.
- Extending the game to time-varying cost fields would allow the framework to address environments that change during observation.
Load-bearing premise
Observations generated by the mean field game population dynamics encode the unknown spatial cost field in a recoverable way through the endogenous local-weight couplings.
What would settle it
Numerical tests in which the two-stage pipeline produces large reconstruction errors for the cost field once moderate noise is added or when applied to new multichannel scene families would falsify the claim of stable recovery.
Figures



read the original abstract
Travel-time tomography seeks to recover a hidden environment from external measurements generated by propagation through an anomalous region. Standard formulations treat propagation as passive, so the environment influences observations mainly by bending paths or changing travel times. Many collective systems do not operate in that regime: observed arrivals are shaped by strategic motion, congestion, and environmental costs. We formulate this active setting through mean field games, in which the unknown environment enters the running cost through a spatial cost field and observations are read from the resulting population dynamics. This yields three contributions. First, it places propagation, observation generation, and inversion within one PDE-constrained model. Second, it clarifies why the inverse problem differs structurally from passive tomography: kinetic, congestion, and environmental effects are coupled endogenously and appear through space- and time-dependent local weights rather than externally chosen global coefficients. Third, it introduces a two-stage inversion pipeline that combines diffusion-based initialization with full mean field game refinement, and numerical experiments show stable recovery under noise and across multichannel scene families. Taken together, these ingredients establish a foundational framework for a class of inverse problems in which data are generated by optimizing and interacting populations rather than by passive signals. The framework identifies the forward MFG model, admissible observation channels, structural mechanisms, and computational recovery route needed to study active tomography under collective dynamics. Such problems arise, among other settings, in biological transport, vascular flow, and subsurface groundwater dynamics.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript formulates active travel-time tomography via a mean field game (MFG) PDE-constrained model in which an unknown spatial cost field c(x) enters the agents' running cost and shapes the resulting population density, flux, and arrival-time observations through endogenous space- and time-dependent couplings of kinetic, congestion, and environmental effects. It contrasts this setting with passive tomography, proposes a two-stage inversion pipeline (diffusion initialization followed by full MFG refinement), and reports numerical experiments indicating stable recovery of c(x) under noise across multichannel scene families.
Significance. If the recoverability claim holds, the work supplies a coherent framework for inverse problems driven by optimizing and interacting populations rather than passive signals, with clear structural distinctions from classical tomography and potential applications in biological transport, vascular flow, and subsurface dynamics. The unified PDE-constrained formulation and the numerical demonstration of the two-stage pipeline under noise constitute concrete strengths.
major comments (2)
- [§3] §3 (Inverse Problem Formulation): the central claim that endogenous local weights permit stable inversion of the spatial cost field rests on the numerical behavior of the two-stage pipeline, yet no injectivity, uniqueness, or quantitative stability estimate is supplied for the forward map from c(x) to the chosen observation channels. Without such an argument the refinement stage may converge to spurious solutions when the true c(x) lies outside the convex hull of the training scenes.
- [§4] §4 (Numerical Experiments): while stable recovery under noise is reported, the manuscript provides no explicit error bars, convergence rates for the MFG solver, or ablation on the relative weighting of the multichannel observations; these omissions make it difficult to assess whether the observed stability is robust or tied to the specific scene families tested.
minor comments (2)
- The notation for the MFG Hamilton-Jacobi and Fokker-Planck equations is introduced late; defining all variables and the precise form of the local weights at the first appearance would improve readability.
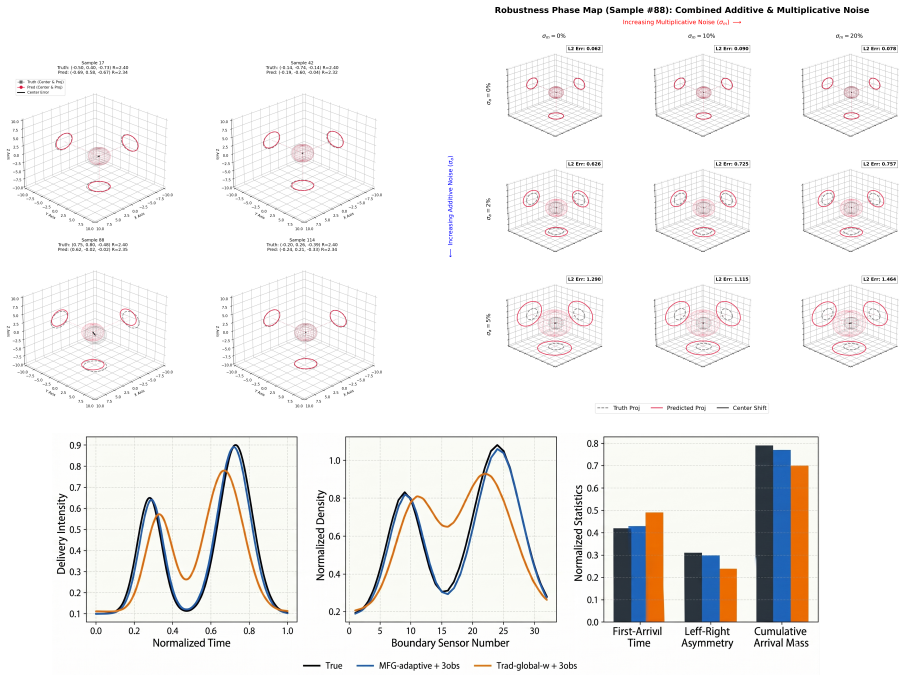
- Figure captions should explicitly state whether the displayed fields are ground truth, diffusion-initialized estimates, or final MFG-refined reconstructions.
Simulated Author's Rebuttal
We thank the referee for the careful reading and constructive comments on our manuscript. We address each major comment point by point below, indicating where revisions will be made and where we maintain the current scope of the work.
read point-by-point responses
-
Referee: [§3] §3 (Inverse Problem Formulation): the central claim that endogenous local weights permit stable inversion of the spatial cost field rests on the numerical behavior of the two-stage pipeline, yet no injectivity, uniqueness, or quantitative stability estimate is supplied for the forward map from c(x) to the chosen observation channels. Without such an argument the refinement stage may converge to spurious solutions when the true c(x) lies outside the convex hull of the training scenes.
Authors: We agree that no theoretical injectivity, uniqueness, or quantitative stability estimate is provided for the forward map. The manuscript's claim of stable recovery is explicitly supported by the numerical experiments in §4 rather than by analysis of the nonlinear inverse operator. Establishing such guarantees for the MFG-constrained map is a substantial open problem that lies outside the scope of this work, which centers on the PDE formulation of active tomography and a practical two-stage recovery method. We will revise the text in §3 to clarify that recoverability is demonstrated empirically for the tested multichannel scene families and noise levels, and to note the risk of spurious solutions for cost fields far from the training distribution while explaining how the diffusion initialization helps anchor the refinement stage in practice. revision: partial
-
Referee: [§4] §4 (Numerical Experiments): while stable recovery under noise is reported, the manuscript provides no explicit error bars, convergence rates for the MFG solver, or ablation on the relative weighting of the multichannel observations; these omissions make it difficult to assess whether the observed stability is robust or tied to the specific scene families tested.
Authors: We accept this observation. The revised manuscript will include explicit error bars on the reported recovery errors, document convergence behavior or iteration counts for the MFG solver, and add an ablation study on the relative weights of the multichannel observations to better quantify robustness across weighting choices and scene families. revision: yes
- Supplying a rigorous injectivity, uniqueness, or quantitative stability estimate for the forward map from c(x) to the observation channels, as this would require extensive new theoretical analysis beyond the modeling and numerical focus of the current manuscript.
Circularity Check
No circularity: new MFG forward model and two-stage pipeline are independent of fitted inputs
full rationale
The paper defines a PDE-constrained mean field game in which the spatial cost field enters the running cost as the unknown to be recovered, with observations read directly from the resulting population density, flux, and arrival-time channels. The two-stage inversion (diffusion initialization followed by MFG refinement) is introduced as a computational procedure whose stability is illustrated by numerical experiments on multichannel scenes; no equation or claim asserts that a derived quantity equals a previously fitted parameter or reduces to a self-citation by construction. The structural distinction from passive tomography is obtained by writing the endogenous local-weight coupling explicitly in the MFG system, which is a modeling choice rather than a tautological renaming or self-referential prediction. Consequently the derivation chain remains self-contained and does not collapse to its own inputs.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption The unknown environment enters the running cost of the mean field game and observations are generated by the resulting population dynamics.
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
The control α_t is chosen to minimize a cost functional of the form J(α)=E[∫(½|α_t|² + f(m_t) + ϕ(X_t)) dt + g(X_T)]
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
coupled Hamilton–Jacobi–Fokker–Planck system … two-stage inversion pipeline
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.