Modular Anthropomorphic Hand Design via Multi-Parameter Finger Benchmarking and Selection
Pith reviewed 2026-06-27 09:44 UTC · model grok-4.3
The pith
Benchmarking isolated fingers with multiple metrics and integrating the best ones modularly improves performance in a teleoperated anthropomorphic hand.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Creating a modular robotic hand platform allows different finger prototypes to be tested in isolation with a set of quantitative benchmarks and then integrated into the complete teleoperated hand, demonstrating that the selected fingers deliver performance improvements across multiple tasks.
What carries the argument
The modular finger integration platform that supports rapid swapping of finger prototypes, paired with multi-parameter benchmarking that evaluates joint, bone, skin, and sensor variations using both mechanism and task metrics.
If this is right
- Finger-level design choices can be refined systematically before full-hand assembly.
- Performance gains appear in multi-object grasping when optimized fingers are used.
- Precision tasks such as light-bulb screwing show improvement after modular integration.
- The quantitative link between component metrics and hand-level outcomes enables targeted iteration.
Where Pith is reading between the lines
- The same modular screening approach could be applied to other robotic limbs or grippers where isolated testing is feasible.
- If integration effects prove small, designers might rely more on finger-only tests and reduce full-system simulation costs.
- Extending the benchmarks to include dynamic interactions between multiple fingers could further strengthen the method.
Load-bearing premise
Metrics measured on isolated fingers will continue to predict and improve performance once those fingers are placed inside the assembled hand, without new interactions or embodiment effects changing the results.
What would settle it
A finger design that scores highest on the isolated benchmarks produces no gain, or produces worse results, when tested in the integrated hand on the same tasks.
Figures

read the original abstract
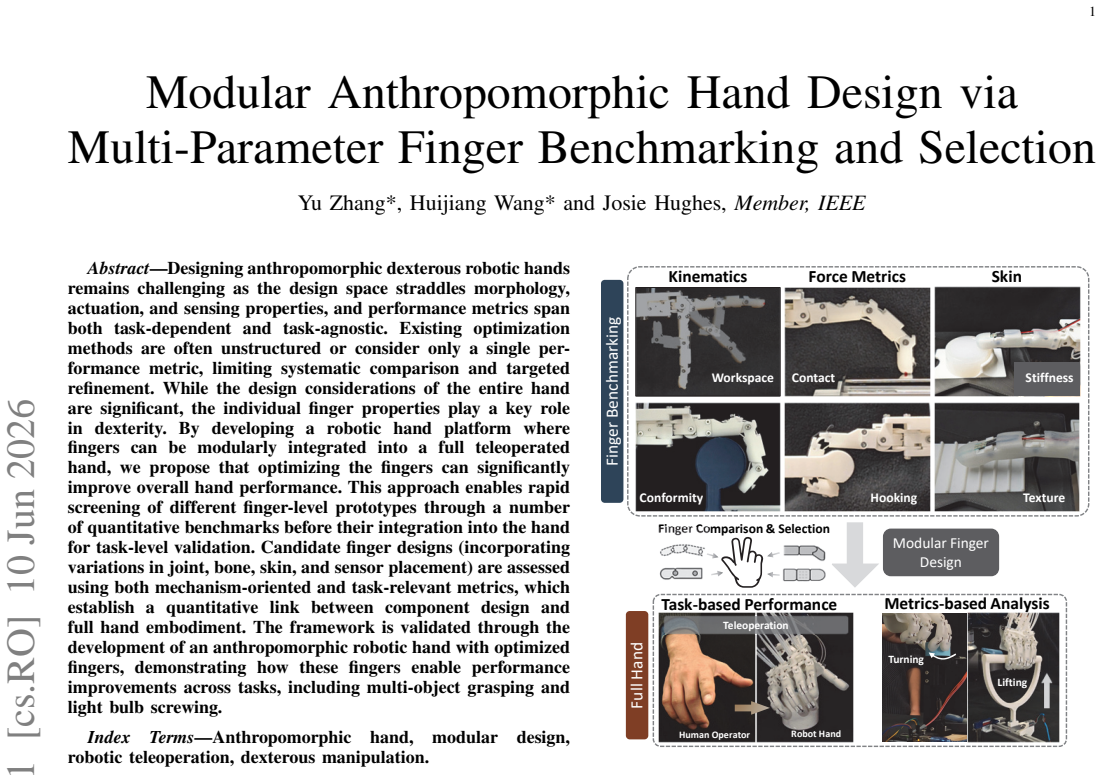
Designing anthropomorphic dexterous robotic hands remains challenging as the design space straddles morphology, actuation, and sensing properties, and performance metrics span both task-dependent and task-agnostic. Existing optimization methods are often unstructured or consider only a single performance metric, limiting systematic comparison and targeted refinement. While the design considerations of the entire hand are significant, the individual finger properties play a key role in dexterity. By developing a robotic hand platform where fingers can be modularly integrated into a full teleoperated hand, we propose that optimizing the fingers can significantly improve overall hand performance. This approach enables rapid screening of different finger-level prototypes through a number of quantitative benchmarks before their integration into the hand for task-level validation. Candidate finger designs (incorporating variations in joint, bone, skin, and sensor placement) are assessed using both mechanism-oriented and task-relevant metrics, which establish a quantitative link between component design and full hand embodiment. The framework is validated through the development of an anthropomorphic robotic hand with optimized fingers, demonstrating how these fingers enable performance improvements across tasks, including multi-object grasping and light bulb screwing.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a modular platform for anthropomorphic robotic hand design in which candidate fingers (varying in joint, bone, skin, and sensor placement) are screened via multi-parameter benchmarks that combine mechanism-oriented and task-relevant metrics; the selected fingers are then integrated into a teleoperated hand, with the claim that this yields measurable performance gains on tasks such as multi-object grasping and light-bulb screwing.
Significance. If the finger-level metrics are shown to correlate with full-hand task outcomes, the approach would supply a more structured alternative to unstructured whole-hand optimization, potentially accelerating targeted refinement of dexterity while reducing the cost of full-system iteration.
major comments (2)
- [Abstract] Abstract: the validation statement that the optimized fingers “enable performance improvements” is unsupported by any quantitative results, baselines, error bars, or exclusion criteria, so the data-to-claim link cannot be evaluated.
- [Abstract] Abstract / validation description: no data or analysis is supplied showing that the relative ranking produced by the isolated-finger benchmarks survives modular integration; unmodeled effects (tendon compliance, inter-finger collisions, palm contact forces) could dominate, rendering the screening step non-predictive.
minor comments (1)
- [Abstract] Abstract: the phrase “a number of quantitative benchmarks” is used without enumerating the specific metrics or the procedure that establishes the quantitative link between component design and full-hand embodiment.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on the abstract and the strength of the validation claims. We address the major comments point-by-point below and will revise the manuscript accordingly.
read point-by-point responses
-
Referee: [Abstract] Abstract: the validation statement that the optimized fingers “enable performance improvements” is unsupported by any quantitative results, baselines, error bars, or exclusion criteria, so the data-to-claim link cannot be evaluated.
Authors: We agree that the abstract should be more precise and data-driven. The full manuscript reports quantitative task results (grasping success rates, completion times) with baselines and variability measures in the experimental sections. We will revise the abstract to explicitly include key metrics, baselines, and error information so the claim is directly supported by the presented data. revision: yes
-
Referee: [Abstract] Abstract / validation description: no data or analysis is supplied showing that the relative ranking produced by the isolated-finger benchmarks survives modular integration; unmodeled effects (tendon compliance, inter-finger collisions, palm contact forces) could dominate, rendering the screening step non-predictive.
Authors: The manuscript demonstrates measurable hand-level improvements after integration and states that the finger benchmarks establish a quantitative link to full-hand embodiment. However, we acknowledge that an explicit correlation analysis between isolated-finger rankings and integrated-hand outcomes is not detailed. We will add a concise comparison or discussion of ranking preservation (or the impact of unmodeled effects) in the revised version to address this concern directly. revision: yes
Circularity Check
No circularity; empirical benchmarking and task validation are independent
full rationale
The paper presents an empirical workflow: candidate fingers are screened via mechanism-oriented and task-relevant metrics at the isolated-finger level, then integrated into a teleoperated hand and evaluated on separate full-hand tasks (multi-object grasping, light-bulb screwing). No equations, fitted parameters, or self-citations are described that would make the reported task improvements equivalent to the finger benchmarks by construction. The validation step uses distinct performance measures on the assembled system, rendering the derivation self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Individual finger properties play a key role in overall hand dexterity
Reference graph
Works this paper leans on
-
[1]
A hand-centric classification of human and robot dexterous manipulation,
I. M. Bullock, R. R. Ma, and A. M. Dollar, “A hand-centric classification of human and robot dexterous manipulation,”IEEE transactions on Haptics, vol. 6, no. 2, pp. 129–144, 2012
2012
-
[2]
A benchmark of dexterity for anthropomorphic robotic hands,
D. Liconti, Y . Zhou, Y . Toshimitsu, R. Hinchet, and R. K. Katzschmann, “A benchmark of dexterity for anthropomorphic robotic hands,”arXiv preprint arXiv:2604.09294, 2026
Pith/arXiv arXiv 2026
-
[3]
A scalable, durable, and efficient embodiment of adaptive synergies: The pisa/iit softhand mark iii,
G. Milazzo, G. Grioli, A. Bicchi, and M. Giuseppe Catalano, “A scalable, durable, and efficient embodiment of adaptive synergies: The pisa/iit softhand mark iii,”IEEE/ASME Transactions on Mechatronics, pp. 1– 11, 2026
2026
-
[4]
Human-like dexterous manipulation for anthropomorphic five-fingered hands: A review,
Y . Huang, D. Fan, H. Duan, D. Yan, W. Qi, J. Sun, Q. Liu, and P. Wang, “Human-like dexterous manipulation for anthropomorphic five-fingered hands: A review,”Biomimetic Intelligence and Robotics, vol. 5, no. 1, p. 100212, 2025
2025
-
[5]
Rbo hand 3: A platform for soft dexterous manipulation,
S. Puhlmann, J. Harris, and O. Brock, “Rbo hand 3: A platform for soft dexterous manipulation,”IEEE Transactions on Robotics, vol. 38, no. 6, pp. 3434–3449, 2022
2022
-
[6]
Critical review on the relationship between design variables and performance of dexterous hands: a quantitative analysis,
L. Jiang, C. Fu, Y . Liang, Y . Jin, and H. Wang, “Critical review on the relationship between design variables and performance of dexterous hands: a quantitative analysis,”Frontiers in Neurorobotics, vol. 18, p. 1513458, 2025
2025
-
[7]
Do robots really need anthropomorphic hands?–a comparison of human and robotic hands,
A. Fabisch, W. Z. E. Amri, C. Singh, and N. Navarro-Guerrero, “Do robots really need anthropomorphic hands?–a comparison of human and robotic hands,”arXiv preprint arXiv:2508.05415, 2025
Pith/arXiv arXiv 2025
-
[8]
Integrated linkage-driven dexterous anthropomor- phic robotic hand,
U. Kim, D. Jung, H. Jeong, J. Park, H.-M. Jung, J. Cheong, H. R. Choi, H. Do, and C. Park, “Integrated linkage-driven dexterous anthropomor- phic robotic hand,”Nature communications, vol. 12, no. 1, p. 7177, 2021
2021
-
[9]
Versatile adhesive skin enhances robotic interactions with the environment,
C. Linghu, Y . Liu, X. Yang, Z. Chen, J. Feng, Y . Zhang, Y . Li, Z. Zhao, Y .-J. Seo, J. Liet al., “Versatile adhesive skin enhances robotic interactions with the environment,”Science Advances, vol. 11, no. 3, p. eadt4765, 2025
2025
-
[10]
Humanoid finger with rigid-flexible-soft structure,
B. Lyu, H. Xiao, Q. Meng, J. Wu, Y . Wang, J. She, and E. F. Fukushima, “Humanoid finger with rigid-flexible-soft structure,”Nature Communications, vol. 16, no. 1, p. 9905, 2025
2025
-
[11]
An active palm enhances dexterity of soft robotic in-hand manipulation,
C. B. Teeple, G. R. Kim, M. A. Graule, and R. J. Wood, “An active palm enhances dexterity of soft robotic in-hand manipulation,” in2021 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2021, pp. 11 790–11 796
2021
-
[12]
Human–robot cooperative piano playing with learning-based real-time music accompaniment,
H. Wang, X. Zhang, and F. Iida, “Human–robot cooperative piano playing with learning-based real-time music accompaniment,”IEEE Transactions on Robotics, vol. 40, pp. 4650–4669, 2024
2024
-
[13]
The folding hand: Anthropomorphic robotic hands with a compact reconfigurable humanoid palm design,
Q. Lu, J. Zou, and Z. Gan, “The folding hand: Anthropomorphic robotic hands with a compact reconfigurable humanoid palm design,”IEEE Robotics and Automation Letters, 2025
2025
-
[14]
A low-cost and modular, 20-dof anthropomorphic robotic hand: Design, actuation and modeling,
Z. Xu, V . Kumar, and E. Todorov, “A low-cost and modular, 20-dof anthropomorphic robotic hand: Design, actuation and modeling,” in 2013 13th IEEE-RAS International Conference on Humanoid Robots (Humanoids). IEEE, 2013, pp. 368–375
2013
-
[15]
Finite element analysis and design optimization of a pneumatically actuating silicone module for robotic surgery applications,
Y . Elsayed, A. Vincensi, C. Lekakou, T. Geng, C. Saaj, T. Ranzani, M. Cianchetti, and A. Menciassi, “Finite element analysis and design optimization of a pneumatically actuating silicone module for robotic surgery applications,”Soft robotics, vol. 1, no. 4, pp. 255–262, 2014
2014
-
[16]
Topology optimized design, fabrication, and characterization of a soft cable-driven gripper,
F. Chen, W. Xu, H. Zhang, Y . Wang, J. Cao, M. Y . Wang, H. Ren, J. Zhu, and Y . Zhang, “Topology optimized design, fabrication, and characterization of a soft cable-driven gripper,”IEEE Robotics and Automation Letters, vol. 3, no. 3, pp. 2463–2470, 2018
2018
-
[17]
Automated co-design of soft hand morphology and control strategy for grasping,
R. Deimel, P. Irmisch, V . Wall, and O. Brock, “Automated co-design of soft hand morphology and control strategy for grasping,” in2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2017, pp. 1213–1218
2017
-
[18]
Optimal design of a motor-driven three-finger soft robotic gripper,
C.-H. Liu, F.-M. Chung, Y . Chen, C.-H. Chiu, and T.-L. Chen, “Optimal design of a motor-driven three-finger soft robotic gripper,”IEEE/ASME Transactions On Mechatronics, vol. 25, no. 4, pp. 1830–1840, 2020
2020
-
[19]
De- signing anthropomorphic soft hands through interaction,
P. Mannam, K. Shaw, D. Bauer, J. Oh, D. Pathak, and N. Pollard, “De- signing anthropomorphic soft hands through interaction,” in2023 IEEE- RAS 22nd International Conference on Humanoid Robots (Humanoids). IEEE, 2023, pp. 1–8
2023
-
[20]
The thumb: Guidelines for a robotic design,
M. Chalon, M. Grebenstein, T. Wimb ¨ock, and G. Hirzinger, “The thumb: Guidelines for a robotic design,” in2010 IEEE/RSJ international conference on intelligent robots and systems. IEEE, 2010, pp. 5886– 5893
2010
-
[21]
Benchmarking protocols for evaluating grasp strength, 14 grasp cycle time, finger strength, and finger repeatability of robot end- effectors,
J. Falco, D. Hemphill, K. Kimble, E. Messina, A. Norton, R. Ropelato, and H. Yanco, “Benchmarking protocols for evaluating grasp strength, 14 grasp cycle time, finger strength, and finger repeatability of robot end- effectors,”IEEE robotics and automation letters, vol. 5, no. 2, pp. 644– 651, 2020
2020
-
[22]
Benchmarking in manipulation research: The ycb object and model set and benchmarking protocols,
B. Calli, A. Walsman, A. Singh, S. Srinivasa, P. Abbeel, and A. M. Dol- lar, “Benchmarking in manipulation research: The ycb object and model set and benchmarking protocols,”arXiv preprint arXiv:1502.03143, 2015
Pith/arXiv arXiv 2015
-
[23]
Benchmarking protocols for evaluating small parts robotic assembly systems,
K. Kimble, K. Van Wyk, J. Falco, E. Messina, Y . Sun, M. Shibata, W. Uemura, and Y . Yokokohji, “Benchmarking protocols for evaluating small parts robotic assembly systems,”IEEE robotics and automation letters, vol. 5, no. 2, pp. 883–889, 2020
2020
-
[24]
Benchmarking in-hand manipulation,
S. Cruciani, B. Sundaralingam, K. Hang, V . Kumar, T. Hermans, and D. Kragic, “Benchmarking in-hand manipulation,”IEEE Robotics and Automation Letters, vol. 5, no. 2, pp. 588–595, 2020
2020
-
[25]
An open-source anthropomorphic robot hand system: Hri hand,
H. Park and D. Kim, “An open-source anthropomorphic robot hand system: Hri hand,”HardwareX, vol. 7, p. e00100, 2020
2020
-
[26]
A modular, open-source 3d printed underactuated hand,
R. R. Ma, L. U. Odhner, and A. M. Dollar, “A modular, open-source 3d printed underactuated hand,” in2013 IEEE International Conference on Robotics and Automation. IEEE, 2013, pp. 2737–2743
2013
-
[27]
Spatially distributed biomimetic compliance enables robust anthropomorphic robotic manipulation,
K. Junge and J. Hughes, “Spatially distributed biomimetic compliance enables robust anthropomorphic robotic manipulation,”Communications Engineering, vol. 4, no. 1, p. 76, 2025
2025
-
[28]
Robotic hand: A review on linkage-driven finger mechanisms of prosthetic hands and evaluation of the performance criteria,
S. R. Kashef, S. Amini, and A. Akbarzadeh, “Robotic hand: A review on linkage-driven finger mechanisms of prosthetic hands and evaluation of the performance criteria,”Mechanism and Machine Theory, vol. 145, p. 103677, 2020
2020
-
[29]
Enhancement of finger motion range with compliant anthropomorphic joint design,
U. C ¸ ulha and F. Iida, “Enhancement of finger motion range with compliant anthropomorphic joint design,”Bioinspiration & biomimetics, vol. 11, no. 2, p. 026001, 2016
2016
-
[30]
Tactile softhand-a: 3d-printed, tactile, highly underactuated, anthropomorphic robot hand with an antagonistic tendon mechanism,
H. Li, C. J. Ford, C. Lu, Y . Lin, M. Bianchi, M. G. Catalano, E. Pso- mopoulou, and N. F. Lepora, “Tactile softhand-a: 3d-printed, tactile, highly underactuated, anthropomorphic robot hand with an antagonistic tendon mechanism,”The International Journal of Robotics Research, p. 02783649251379516, 2024
2024
-
[31]
Tactile sensing for dexter- ous in-hand manipulation in robotics—a review,
H. Yousef, M. Boukallel, and K. Althoefer, “Tactile sensing for dexter- ous in-hand manipulation in robotics—a review,”Sensors and Actuators A: physical, vol. 167, no. 2, pp. 171–187, 2011
2011
-
[32]
In-hand object recognition via texture properties with robotic hands, artificial skin, and novel tactile descriptors,
M. Kaboli, R. Walker, G. Chenget al., “In-hand object recognition via texture properties with robotic hands, artificial skin, and novel tactile descriptors,” in2015 IEEE-RAS 15th International Conference on Humanoid Robots (Humanoids). IEEE, 2015, pp. 1155–1160
2015
-
[33]
Design of a flexible tactile sensor for classification of rigid and deformable objects,
A. Drimus, G. Kootstra, A. Bilberg, and D. Kragic, “Design of a flexible tactile sensor for classification of rigid and deformable objects,”Robotics and Autonomous Systems, vol. 62, no. 1, pp. 3–15, 2014
2014
-
[34]
A soft skin with self- decoupled three-axis force-sensing taxels,
Y . Yan, A. Zermane, J. Pan, and A. Kheddar, “A soft skin with self- decoupled three-axis force-sensing taxels,”Nature Machine Intelligence, vol. 6, no. 11, pp. 1284–1295, 2024
2024
-
[35]
Adapt-teleop: robotic hand with human matched embodiment enables dexterous teleoperated manipulation,
K. Junge and J. Hughes, “Adapt-teleop: robotic hand with human matched embodiment enables dexterous teleoperated manipulation,”npj Robotics, vol. 3, no. 1, p. 31, 2025
2025
-
[36]
Learning dexterous manipulation for a soft robotic hand from human demonstrations,
A. Gupta, C. Eppner, S. Levine, and P. Abbeel, “Learning dexterous manipulation for a soft robotic hand from human demonstrations,” in 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2016, pp. 3786–3793
2016
-
[37]
Bench- marking planar rotation capabilities of robot hands with fingers,
J. Morrow, J. Campbell, R. Balasubramanian, and C. Grimm, “Bench- marking planar rotation capabilities of robot hands with fingers,” in2023 20th International Conference on Ubiquitous Robots (UR). IEEE, 2023, pp. 559–565
2023
-
[38]
Clinical test of apposition and counter-apposition of the thumb,
A. Kapandji, “Clinical test of apposition and counter-apposition of the thumb,”Annales de chirurgie de la main: organe officiel des societes de chirurgie de la main, vol. 5, no. 1, pp. 67–73, 1986
1986
-
[39]
Design, fabrication and control of soft robots,
D. Rus and M. T. Tolley, “Design, fabrication and control of soft robots,” Nature, vol. 521, no. 7553, pp. 467–475, 2015
2015
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.