Intermittent Strategic Cooperation of Two Selfish Agents on Graphs
Pith reviewed 2026-06-27 01:46 UTC · model grok-4.3
The pith
Two self-interested agents on graphs always have at least one stable joint strategy for intermittent cooperation.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
In the Intermittent Strategic Cooperation-Based Two-Agent Path Planning problem, stable cooperation between two agents must follow a highly constrained form. At least one pure Nash equilibrium exists in every instance, and all relevant equilibria can be enumerated in polynomial time.
What carries the argument
The characterization of Pure Nash Equilibrium joint strategies in the IC2PP game, which enforces that stable cooperation occurs only at specific constrained points along the agents' paths.
If this is right
- Stable intermittent cooperation is possible but must adhere to a highly constrained form.
- At least one pure Nash equilibrium exists for any graph instance.
- A polynomial-time algorithm can enumerate all relevant equilibria.
- Coordination mechanisms based on bargaining can select among multiple equilibria to improve outcomes.
Where Pith is reading between the lines
- If the model holds, real-world multi-agent navigation systems could use these equilibria to predict stable cooperation without enforcement.
- Extending the approach to more than two agents might reveal whether existence and efficient computation generalize.
- The constrained form of cooperation suggests that only certain graph structures allow beneficial teaming up.
Load-bearing premise
The interactions can be accurately captured as a finite two-player game where agents choose paths and cooperation points with payoffs as negative travel times.
What would settle it
A specific graph where two agents have targets such that no pure Nash equilibrium joint strategy exists despite the problem setup.
Figures

read the original abstract
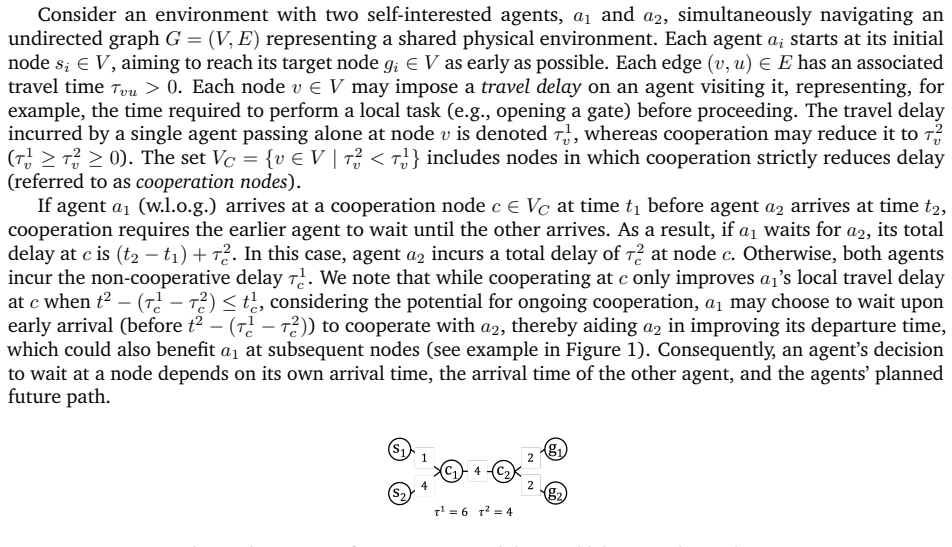
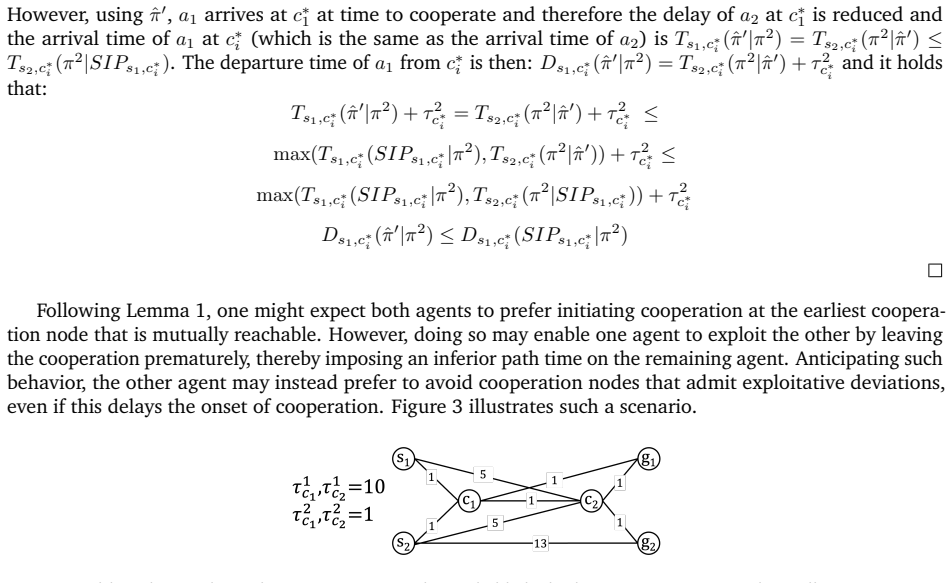
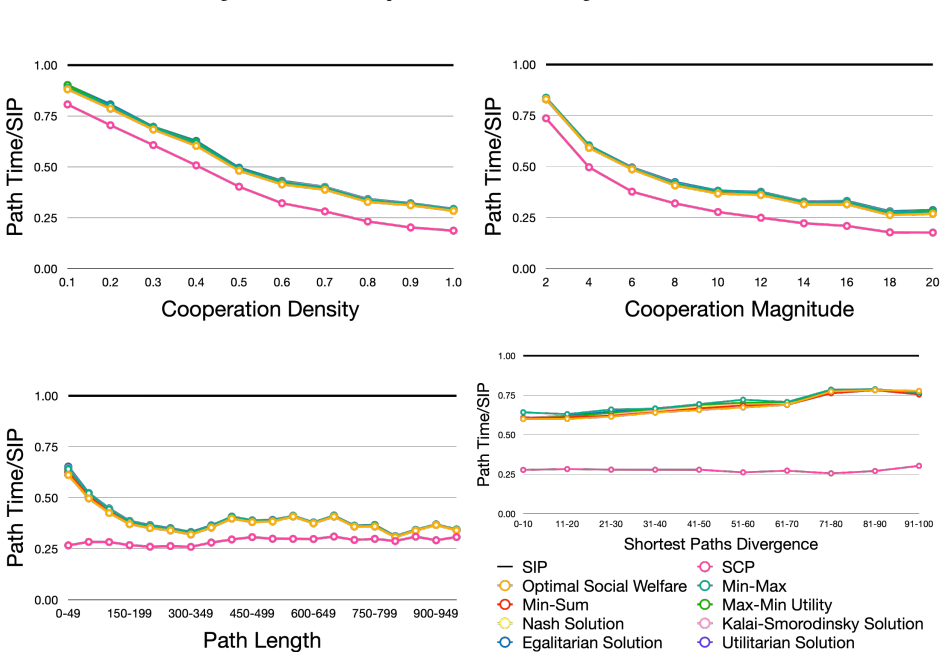
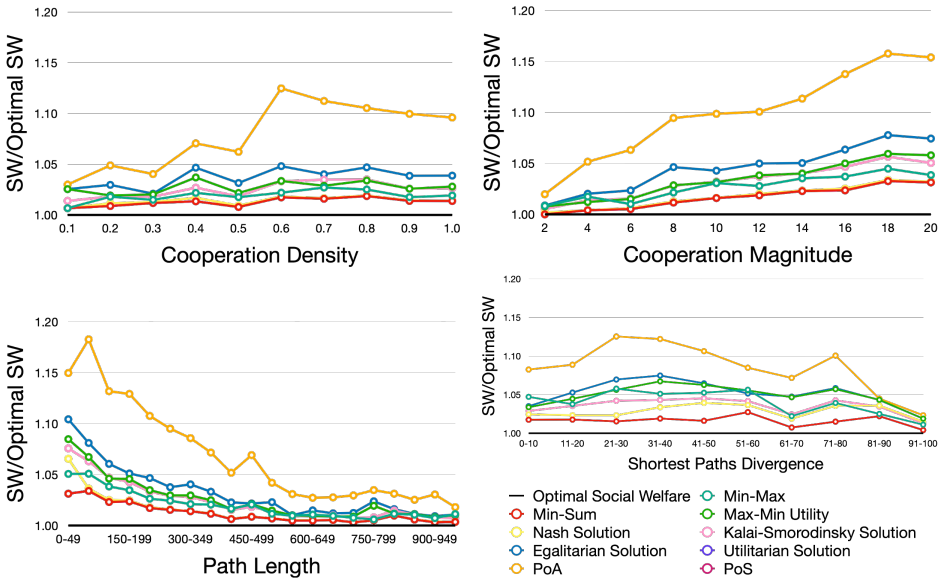
We study strategic space- and time-constrained cooperation between two self-interested agents through the Intermittent Strategic Cooperation-Based Two-Agent Path Planning (IC2PP) problem, a shortest-path game on graphs in which agents navigate toward individual targets while optionally cooperating at specific nodes to reduce their own travel times. Although such cooperation can strictly benefit both agents, it is strategically fragile: agents may deviate at any point along their paths. Modeled as a 2-player game, we characterize the structure of Pure Nash Equilibrium (PNE) joint strategies in IC2PP, and show that stable cooperation must follow a highly constrained form. We further prove that at least one PNE exists in every instance of IC2PP, and present a polynomial-time algorithm for enumerating all relevant PNEs. When multiple equilibria arise, we study coordination mechanisms based on bargaining-theoretic selection concepts and empirically compare equilibrium outcomes in terms of individual travel times and social welfare.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces the Intermittent Strategic Cooperation-Based Two-Agent Path Planning (IC2PP) problem as a shortest-path game on graphs in which two self-interested agents navigate to individual targets while optionally cooperating at specific nodes to reduce their travel times. Modeled as a 2-player game, the manuscript characterizes the structure of Pure Nash Equilibrium (PNE) joint strategies, asserts that stable cooperation must follow a highly constrained form, proves that at least one PNE exists in every instance, and presents a polynomial-time algorithm for enumerating all relevant PNEs. It further examines coordination mechanisms based on bargaining-theoretic selection concepts and provides empirical comparisons of equilibrium outcomes with respect to individual travel times and social welfare.
Significance. If the asserted PNE existence proof and polynomial-time enumeration algorithm are correct and the game is finite with well-defined payoffs, the work would supply a theoretical basis for computing stable cooperation in selfish multi-agent path planning on graphs. The constrained form of equilibria and the enumeration procedure could support mechanism design in robotics and transportation domains; the bargaining and empirical components add practical value by addressing equilibrium selection.
major comments (1)
- [Abstract] Abstract: the central claims that 'at least one PNE exists in every instance' and that a 'polynomial-time algorithm for enumerating all relevant PNEs' exists are stated without any derivation steps, strategy-space definition, payoff formalization, or algorithm description. No section, equation, or pseudocode is supplied against which to verify finiteness of the game, correctness of the existence argument, or polynomial runtime.
minor comments (1)
- [Abstract] Abstract: the term 'relevant PNEs' is used without definition or clarification of the selection criterion.
Simulated Author's Rebuttal
We thank the referee for their review. We address the single major comment below.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claims that 'at least one PNE exists in every instance' and that a 'polynomial-time algorithm for enumerating all relevant PNEs' exists are stated without any derivation steps, strategy-space definition, payoff formalization, or algorithm description. No section, equation, or pseudocode is supplied against which to verify finiteness of the game, correctness of the existence argument, or polynomial runtime.
Authors: Abstracts are concise summaries by design and do not include derivations, definitions, or pseudocode; those appear in the main text. The strategy space and payoffs are formalized in the problem formulation section. Finiteness follows from the finite action sets of both agents. The PNE existence result is stated and proved as a theorem in the equilibrium analysis section. The enumeration procedure, including its pseudocode and polynomial runtime bound, is given in the algorithms section. These elements in the body of the manuscript permit verification of the abstract claims. revision: no
Circularity Check
No significant circularity; derivation is self-contained game-theoretic modeling
full rationale
The abstract models IC2PP as a finite 2-player game with payoffs as negative travel times and claims a proof of PNE existence plus a polynomial enumeration algorithm. No equations, fitted parameters, or self-citations are supplied that reduce any claimed result to its own inputs by construction. The structure of PNEs and existence proof are presented as independent analysis of the defined game, consistent with standard non-cooperative game theory on graphs. No load-bearing step matches any enumerated circularity pattern.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption The interaction is modeled as a finite 2-player game with perfect information where agents choose paths and cooperation points.
invented entities (1)
-
IC2PP problem
no independent evidence
Reference graph
Works this paper leans on
-
[1]
The price of stability for network design with fair cost allocation.SIAM Journal on Computing, 38(4), 2008
Elliot Anshelevich, Anirban Dasgupta, Jon Kleinberg, Éva Tardos, Tom Wexler, and Tim Roughgarden. The price of stability for network design with fair cost allocation.SIAM Journal on Computing, 38(4), 2008
2008
-
[2]
Multiple mobile robot task and motion planning: A survey .ACM Computing Surveys, 55(10):1–35, 2023
Luke Antonyshyn, Jefferson Silveira, Sidney Givigi, and Joshua Marshall. Multiple mobile robot task and motion planning: A survey .ACM Computing Surveys, 55(10):1–35, 2023
2023
-
[3]
Dynamic coalition formation and the core.Journal of Economic Behavior & Organization, 49(3), 2002
Tone Arnold and Ulrich Schwalbe. Dynamic coalition formation and the core.Journal of Economic Behavior & Organization, 49(3), 2002
2002
-
[4]
Subjectivity and correlation in randomized strategies.Journal of mathematical Economics, 1(1), 1974
Robert J Aumann. Subjectivity and correlation in randomized strategies.Journal of mathematical Economics, 1(1), 1974
1974
-
[5]
Timed network games.Information and Computation, 290:104996, 2023
Guy Avni, Shibashis Guha, and Orna Kupferman. Timed network games.Information and Computation, 290:104996, 2023. ISSN 0890-5401. doi: https://doi.org/10.1016/j.ic.2022.104996. URL https: //www.sciencedirect.com/science/article/pii/S0890540122001511
-
[6]
Hedonic games
Haris Aziz and Rahul Savani. Hedonic games. InHandbook of Computational Social Choice. Cambridge University Press, 2016
2016
-
[7]
Computing desirable partitions in additively separable hedonic games.Artificial Intelligence, 195, 2013
Haris Aziz, Felix Brandt, and Hans Georg Seedig. Computing desirable partitions in additively separable hedonic games.Artificial Intelligence, 195, 2013
2013
-
[8]
Neighborhood stability in assign- ments on graphs.arXiv preprint arXiv:2407.05240, 2024
Haris Aziz, Grzegorz Lisowski, Mashbat Suzuki, and Jeremy Vollen. Neighborhood stability in assign- ments on graphs.arXiv preprint arXiv:2407.05240, 2024
arXiv 2024
-
[9]
Masoud Bashiri and Cody H. Fleming. A platoon-based intersection management system for autonomous vehicles. In2017 IEEE Intelligent Vehicles Symposium (IV), pages 667–672, 2017. doi: 10.1109/IVS. 2017.7995794
work page doi:10.1109/ivs 2017
-
[10]
Stable dinner party seating arrange- ments
Damien Berriaud, Andrei Constantinescu, and Roger Wattenhofer. Stable dinner party seating arrange- ments. InProc. of WINE, 2023
2023
-
[11]
PhD thesis, Politecnico di Torino, 2022
Andrea Bertolini.Decentralized algorithms for multi-agent pathfinding. PhD thesis, Politecnico di Torino, 2022
2022
-
[12]
Sharing rides with friends: A coalition formation algorithm for ridesharing
Filippo Bistaffa, Alessandro Farinelli, and Sarvapali Ramchurn. Sharing rides with friends: A coalition formation algorithm for ridesharing. InProc. of AAAI, 2015
2015
-
[13]
Hedonic seat arrangement problems.arXiv preprint arXiv:2002.10898, 2020
Hans L Bodlaender, Tesshu Hanaka, Lars Jaffke, Hirotaka Ono, Yota Otachi, and Tom C van der Zanden. Hedonic seat arrangement problems.arXiv preprint arXiv:2002.10898, 2020. 23
arXiv 2002
-
[14]
Multi-agent path finding with task assignment and supporting constraints
Caroline Bonhomme, Christophe Grand, Charles Lesire, Jean-Louis Dufour, and Christophe Guettier. Multi-agent path finding with task assignment and supporting constraints. InProc. of ECAI, 2024
2024
-
[15]
Coordinating resources in stackelberg security games.European Journal of Operational Research, 291(3), 2021
Víctor Bucarey , Carlos Casorrán, Martine Labbé, Fernando Ordoñez, and Oscar Figueroa. Coordinating resources in stackelberg security games.European Journal of Operational Research, 291(3), 2021
2021
-
[16]
Topological distance games.Theoretical Computer Science, 981, 2024
Martin Bullinger and Warut Suksompong. Topological distance games.Theoretical Computer Science, 981, 2024
2024
-
[17]
Interaction- aware game-theoretic motion planning for automated vehicles using bi-level optimization
Christoph Burger, Johannes Fischer, Frank Bieder, Ömer ¸ Sahin Ta¸ s, and Christoph Stiller. Interaction- aware game-theoretic motion planning for automated vehicles using bi-level optimization. InProc. of the International Conference on Intelligent Transportation Systems (ITSC), pages 3978–3985, 2022
2022
-
[18]
A distributed approach to autonomous intersec- tion management via multi-agent reinforcement learning, 2024
Matteo Cederle, Marco Fabris, and Gian Antonio Susto. A distributed approach to autonomous intersec- tion management via multi-agent reinforcement learning, 2024. URL https://arxiv.org/abs/2405. 08655
2024
-
[19]
Optimal seat arrangement: what are the hard and easy cases?arXiv preprint arXiv:2305.10381, 2023
Esra Ceylan, Jiehua Chen, and Sanjukta Roy. Optimal seat arrangement: what are the hard and easy cases?arXiv preprint arXiv:2305.10381, 2023
arXiv 2023
-
[20]
Dispatching through pricing: Modeling ride-sharing and designing dynamic prices
Mengjing Chen, Weiran Shen, Pingzhong Tang, and Song Zuo. Dispatching through pricing: Modeling ride-sharing and designing dynamic prices. InProc. of IJCAI, 2019
2019
-
[21]
Stackelberg security games: Computing the shortest-path equilibrium.Expert Systems with Applications, 42(8), 2015
Julio B Clempner and Alexander S Poznyak. Stackelberg security games: Computing the shortest-path equilibrium.Expert Systems with Applications, 42(8), 2015
2015
-
[22]
Collaborative urban trans- portation: Recent advances in theory and practice.European Journal of Operational Research, 273(3), 2019
Catherine Cleophas, Caitlin Cottrill, Jan Fabian Ehmke, and Kevin Tierney. Collaborative urban trans- portation: Recent advances in theory and practice.European Journal of Operational Research, 273(3), 2019
2019
-
[23]
Argyrios Deligkas, Eduard Eiben, Dušan Knop, and Šimon Schierreich. Individual rationality in topologi- cal distance games is surprisingly hard.arXiv preprint arXiv:2404.14128, 2024
arXiv 2024
-
[24]
A multiagent approach to autonomous intersection management.Journal of artificial intelligence research, 31, 2008
Kurt Dresner and Peter Stone. A multiagent approach to autonomous intersection management.Journal of artificial intelligence research, 31, 2008
2008
-
[25]
Florian Drews and Dennis Luxen. Multi-hop ride sharing.Proceedings of the International Symposium on Combinatorial Search, 4(1):71–79, 8 2021. doi: 10.1609/socs.v4i1.18279. URL https://ojs.aaai. org/index.php/SOCS/article/view/18279
-
[26]
Hedonic coalitions: Optimality and stability.Econometrica: Journal of the Econometric Society, 1980
Jacques H Dreze and Joseph Greenberg. Hedonic coalitions: Optimality and stability.Econometrica: Journal of the Econometric Society, 1980
1980
-
[27]
Existence and efficiency of equilibria for cost- sharing in generalized weighted congestion games.ACM Transactions on Economics and Computation (TEAC), 8(2), 2020
Martin Gairing, Kostas Kollias, and Grammateia Kotsialou. Existence and efficiency of equilibria for cost- sharing in generalized weighted congestion games.ACM Transactions on Economics and Computation (TEAC), 8(2), 2020
2020
-
[28]
Congestion games with capacitated resources.Theory of Computing Systems, 57(3), 2015
Laurent Gourves, Jérôme Monnot, Stefano Moretti, and Nguyen Kim Thang. Congestion games with capacitated resources.Theory of Computing Systems, 57(3), 2015
2015
-
[29]
Collaborative transportation with overlapping coalitions.European Journal of Operational Research, 271(1), 2018
Mario Guajardo, Mikael Rönnqvist, Patrik Flisberg, and Mikael Frisk. Collaborative transportation with overlapping coalitions.European Journal of Operational Research, 271(1), 2018
2018
-
[30]
Cost-sharing mechanisms for network design
Anupam Gupta, Aravind Srinivasan, and Éva Tardos. Cost-sharing mechanisms for network design. Algorithmica, 50(1):98–119, 2008
2008
-
[31]
Autonomous intersection management: Multi- intersection optimization
Matthew Hausknecht, Tsz-Chiu Au, and Peter Stone. Autonomous intersection management: Multi- intersection optimization. InProc. of IROS, 2011
2011
-
[32]
The effect of collusion in congestion games
Ara Hayrapetyan, Éva Tardos, and Tom Wexler. The effect of collusion in congestion games. InProc. of ACM STOC, 2006. 24
2006
-
[33]
Probabilistic physical search on general graphs: approximations and heuristics.Autonomous Agents and Multi-Agent Systems, 34(1), 2020
Noam Hazon and Mira Gonen. Probabilistic physical search on general graphs: approximations and heuristics.Autonomous Agents and Multi-Agent Systems, 34(1), 2020
2020
-
[34]
Collaborative multi agent physical search with probabilistic knowledge
Noam Hazon, Yonatan Aumann, and Sarit Kraus. Collaborative multi agent physical search with probabilistic knowledge. InProc. of IJCAI, 2009
2009
-
[35]
Physical search problems with probabilis- tic knowledge.Artificial Intelligence, 196, 2013
Noam Hazon, Yonatan Aumann, Sarit Kraus, and David Sarne. Physical search problems with probabilis- tic knowledge.Artificial Intelligence, 196, 2013
2013
-
[36]
Decentralized multi-agent path finding for uav traffic management
Florence Ho, Rúben Geraldes, Artur Gonçalves, Bastien Rigault, Benjamin Sportich, Daisuke Kubo, Marc Cavazza, and Helmut Prendinger. Decentralized multi-agent path finding for uav traffic management. IEEE Transactions on Intelligent Transportation Systems, 23(2), 2020
2020
-
[37]
Mirrokni, Heiko Röglin, and Shang-Hua Teng
Martin Hoefer, Vahab S. Mirrokni, Heiko Röglin, and Shang-Hua Teng. Competitive routing over time.Theoretical Computer Science, 412(39):5420–5432, 2011. ISSN 0304-3975. doi: https:// doi.org/10.1016/j.tcs.2011.05.055. URL https://www.sciencedirect.com/science/article/pii/ S0304397511004956
-
[38]
Dynamics in matching and coalition formation games with structural constraints.Artificial Intelligence, 262, 2018
Martin Hoefer, Daniel Vaz, and Lisa Wagner. Dynamics in matching and coalition formation games with structural constraints.Artificial Intelligence, 262, 2018
2018
-
[39]
Tictac: From transfer-incapable carpooling to transfer-allowed carpooling
Yunfei Hou, Xu Li, and Chunming Qiao. Tictac: From transfer-incapable carpooling to transfer-allowed carpooling. InProc. of GLOBECOM, 2012
2012
-
[40]
A survey of task allocation and load balancing in distributed systems.IEEE Transactions on Parallel and Distributed Systems, 27(2), 2015
Yichuan Jiang. A survey of task allocation and load balancing in distributed systems.IEEE Transactions on Parallel and Distributed Systems, 27(2), 2015
2015
-
[41]
Toward 6g-v2x: Edge-assisted platoon coordination for cooperative intersection control
Jozef Juraško, Lukáš Lovás, Rastislav Bencel, and Peter Trúchly . Toward 6g-v2x: Edge-assisted platoon coordination for cooperative intersection control. In2025 International Symposium ELMAR, pages 21–24,
-
[42]
doi: 10.1109/ELMAR66948.2025.11194002
-
[43]
Other solutions to nash’s bargaining problem.Econometrica, pages 513–518, 1975
Ehud Kalai and Meir Smorodinsky . Other solutions to nash’s bargaining problem.Econometrica, pages 513–518, 1975
1975
-
[44]
Simultaneous optimization of traffic signal control and vehicle platooning scheme based on connected and automated vehicle (cav) technology.IEEE Access, 2025
Jiwon Kang, Yongjun Choi, and Keemin Sohn. Simultaneous optimization of traffic signal control and vehicle platooning scheme based on connected and automated vehicle (cav) technology.IEEE Access, 2025
2025
-
[45]
Consideration of multiple objectives in horizontal cooperation with an application to transportation planning.IISE Transactions, 49(12), 2017
Alf Kimms and Igor Kozeletskyi. Consideration of multiple objectives in horizontal cooperation with an application to transportation planning.IISE Transactions, 49(12), 2017
2017
-
[46]
Klusch and A
M. Klusch and A. Gerber. Dynamic coalition formation among rational agents.IEEE Intelligent Systems, 17(3), 2002
2002
-
[47]
Worst-case equilibria
Elias Koutsoupias and Christos Papadimitriou. Worst-case equilibria. InProc. of STACS, 1999
1999
-
[48]
Multi-hypothesis interactions in game-theoretic motion planning
Forrest Laine, David Fridovich-Keil, Chih-Yuan Chiu, and Claire Tomlin. Multi-hypothesis interactions in game-theoretic motion planning. InProc. of IEEE International Conference on Robotics and Automation (ICRA), 2021
2021
-
[49]
Lucidgames: Online unscented inverse dynamic games for adaptive trajectory prediction and planning.IEEE Robotics and Automation Letters, 6 (3):5485–5492, 2021
Simon Le Cleac’h, Mac Schwager, and Zachary Manchester. Lucidgames: Online unscented inverse dynamic games for adaptive trajectory prediction and planning.IEEE Robotics and Automation Letters, 6 (3):5485–5492, 2021
2021
-
[50]
John Wiley & Sons, 2008
David Lewis.Convention: A philosophical study. John Wiley & Sons, 2008
2008
-
[51]
A review of path-planning approaches for multiple mobile robots.Machines, 10(9):773, 2022
Shiwei Lin, Ang Liu, Jianguo Wang, and Xiaoying Kong. A review of path-planning approaches for multiple mobile robots.Machines, 10(9):773, 2022
2022
-
[52]
John F et al. Nash. The bargaining problem.Econometrica, 18(2), 1950. 25
1950
-
[53]
Ramchurn, Maria Polukarov, Alessandro Farinelli, Cuong Truong, and Nicholas R
Sarvapali D. Ramchurn, Maria Polukarov, Alessandro Farinelli, Cuong Truong, and Nicholas R. Jennings. Coalition formation with spatial and temporal constraints. InProc. of AAMAS, 2010
2010
-
[54]
Ridesharing with driver location preferences.arXiv preprint arXiv:1905.13191, 2019
Duncan Rheingans-Yoo, Scott Duke Kominers, Hongyao Ma, and David C Parkes. Ridesharing with driver location preferences.arXiv preprint arXiv:1905.13191, 2019
arXiv 1905
-
[55]
Efficiency and fairness in team search with self-interested agents.Autonomous Agents and Multi-Agent Systems, 30, 2016
Igor Rochlin, Yonatan Aumann, David Sarne, and Luba Golosman. Efficiency and fairness in team search with self-interested agents.Autonomous Agents and Multi-Agent Systems, 30, 2016
2016
-
[56]
Multi-agent pathfinding: Definitions, variants, and benchmarks
Roni Stern, Nathan Sturtevant, Ariel Felner, Sven Koenig, Hang Ma, Thayne Walker, Jiaoyang Li, Dor Atzmon, Liron Cohen, TK Kumar, et al. Multi-agent pathfinding: Definitions, variants, and benchmarks. InProc. of SoCS, 2019
2019
-
[57]
Ad hoc autonomous agent teams: Collaboration without pre-coordination
Peter Stone, Gal Kaminka, Sarit Kraus, and Jeffrey Rosenschein. Ad hoc autonomous agent teams: Collaboration without pre-coordination. InProc. of AAAI, 2010
2010
-
[58]
Convention as correlated equilibrium.Erkenntnis, 42(1), 1995
Peter Vanderschraaf. Convention as correlated equilibrium.Erkenntnis, 42(1), 1995
1995
-
[59]
Congestion games: Optimization in competition
Berthold Vöcking and R Aachen. Congestion games: Optimization in competition. InACiD, 2006
2006
-
[60]
Game-theoretic planning for self-driving cars in multivehicle competitive scenarios.IEEE Transactions on Robotics, 37(4): 1313–1325, 2021
Mingyu Wang, Zijian Wang, John Talbot, J Christian Gerdes, and Mac Schwager. Game-theoretic planning for self-driving cars in multivehicle competitive scenarios.IEEE Transactions on Robotics, 37(4): 1313–1325, 2021
2021
-
[61]
Self-adaptation-based dynamic coalition formation in a distributed agent network: A mechanism and a brief survey .IEEE Transactions on Parallel and Distributed Systems, 24(5), 2013
Dayong Ye, Minjie Zhang, and Danny Sutanto. Self-adaptation-based dynamic coalition formation in a distributed agent network: A mechanism and a brief survey .IEEE Transactions on Parallel and Distributed Systems, 24(5), 2013
2013
-
[62]
An open loop stackelberg solution to optimal strategy for uav pursuit-evasion game.Aerospace Science and Technology, 129, 2022
Yiqun Zhang, Pengfei Zhang, Xiaodong Wang, Feng Song, Chaoyong Li, and Junhong Hao. An open loop stackelberg solution to optimal strategy for uav pursuit-evasion game.Aerospace Science and Technology, 129, 2022
2022
-
[63]
Zishuo Zhao, Xi Chen, Xuefeng Zhang, and Yuan Zhou. Dynamic car dispatching and pricing: Revenue and fairness for ridesharing platforms.arXiv preprint arXiv:2207.06318, 2022
arXiv 2022
-
[64]
Multi-agent cooperative transportation: Optimal and efficient task allocation and path finding
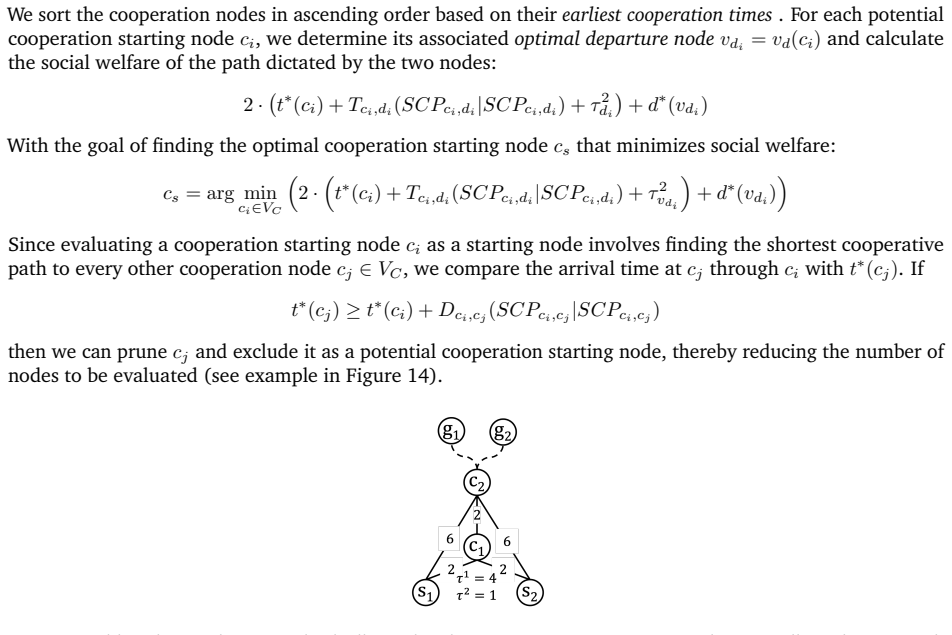
Ning Zhou, Nikolai WF Bode, and Edmund R Hunt. Multi-agent cooperative transportation: Optimal and efficient task allocation and path finding. 2026. A Best Response Algorithm Algorithm 5 identifies the best response strategy for agent a1, given a2’s pathπ. The algorithm begins by computing SIP s1 (the shortest independent paths from a1’s starting node to ...
2026
-
[65]
The shortest independent path froms i tog i. 27
-
[66]
Since a−i’s path to cs is non-cooperative (Condition 2, it follows that cs is the first cooperation node along π−i that ai can reach at a cooperation-relevant time
The path SIP si,c∗ 1 ◦π −i c∗ 1 ,d ◦SIP d,gi, where c∗ 1 is the first cooperation node along π−i that ai can reach at a cooperation-relevant time, anddis the optimal departure node fora i alongπ −i c∗ 1 ,gi Since(π 1, π2)is an ECJS, following Condition 5, it holds that: T(π i |π −i)≤T(SIP si,gi) We therefore examine the cooperation-assisted path SIP si,c∗...
-
[67]
IfT(π i(N C) si,cs )≤T(π −i(N C) s−i,cs ), thenT(SIP si,cs)≤T(π i(N C) si,cs )≤T(π −i(N C) s−i,cs )Thus: max(T(π i(N C) si,cs ), T(π −i(N C) s−i,cs )) = max(T(SIP si,cs), T(π −i(N C) s−i,cs )) =T(π −i(N C) s−i,cs ) Hence: T(π i|π−i) =T(π i∗ |π−i)
-
[68]
If T(π i(N C) si,cs )> T(π −i(N C) s−i,cs ), then, since π1(N C) s1,cs and π2(N C) s2,cs are Mutually-Robust Non-Cooperative Partial Paths, it follows thatπ i(N C) si,cs =SIP si,cs. Thus: max(T(π i(N C) si,cs ), T(π −i(N C) s−i,cs )) = max(T(SIP si,cs), T(π −i(N C) s−i,cs )) Hence: T(π i|π−i) =T(π i∗ |π−i) In both cases, ai’s pathπi serves as the best res...
-
[69]
(a) We assume, by contradiction, that the joint strategy (π1, π2) contains more than one cooperation segment
Condition 1: We consider both parts of Condition 1: (a) the agents cooperate along exactly one continuous cooperation segment, and (b) this cooperation segment is stable. (a) We assume, by contradiction, that the joint strategy (π1, π2) contains more than one cooperation segment. In that case, it can be expressed as: π1 =π 1 s1,cs1 ◦π C cs1 ,cd1 ◦π 1 cd1 ...
-
[70]
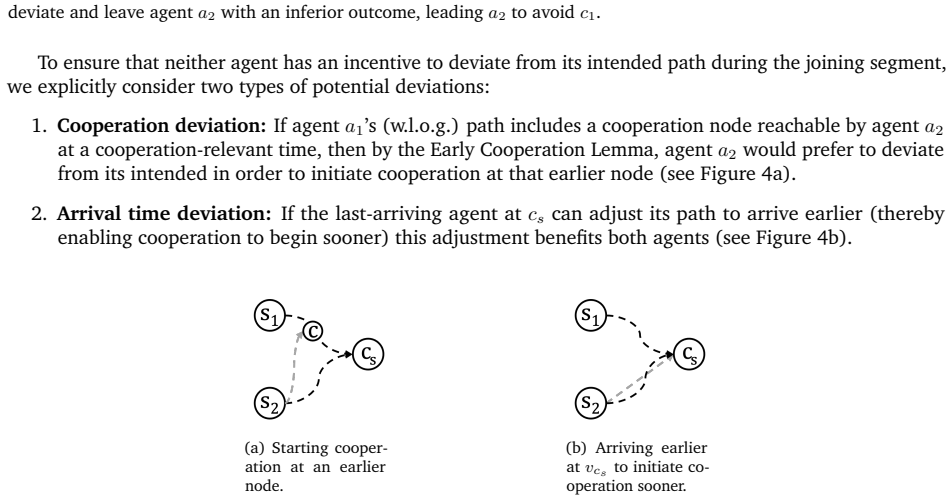
We consider two options: (a) The path of one of the agents, without loss of generality a2, to cs, π2 s2,cs, is not non-cooperative
Condition 2: We assume, by contradiction, that the paths of the two agents from their starting nodes to cs are notMutually-Robust Non-Cooperative Partial Paths. We consider two options: (a) The path of one of the agents, without loss of generality a2, to cs, π2 s2,cs, is not non-cooperative. In this case, there exists a cooperation node along this path, c...
-
[71]
This implies that: T(π 1 s1,cs ◦π 2 cs,cd′ ◦SIP cd′ ,g1 |π2)< T(SIP s1,cs ◦π 2 cs,cd ◦SIP cd,g1 |π2) =T(π 1, π2) which contradicts the assumption that(π 1, π2)is a PNE
Condition 3: We assume, by contradiction, that the optimal departure node for one of the agents, without loss of generalitya 1, along the other agent’s pathπ2 cs,g2 isc d′ ̸=c d. This implies that: T(π 1 s1,cs ◦π 2 cs,cd′ ◦SIP cd′ ,g1 |π2)< T(SIP s1,cs ◦π 2 cs,cd ◦SIP cd,g1 |π2) =T(π 1, π2) which contradicts the assumption that(π 1, π2)is a PNE. 29
-
[72]
Since (π1, π2) involves a single continuous cooperation segment (Condition 1), and cd is the cooperation departure node, the joint path(π 1 cd,g1 , π2 cd,g2)contains no cooperation
Condition 4: We assume, by contradiction, that for one of the agents, without loss of generality a1, the partial path π1 cd,g1 from the departure node cd to its target node g1 differs from the shortest independent path SIP cd,g1. Since (π1, π2) involves a single continuous cooperation segment (Condition 1), and cd is the cooperation departure node, the jo...
-
[73]
In this case, the independent shortest path fora 1 would be a better response to theπ 2 thanπ 1: T(SIP s1,g1 , π2)< T(π 1, π2)
Condition 5: We assume, by contradiction, that one of the agents, without loss of generality a1, prefers to take its independent path directly from its starting node to its target node, SIP s1,g1. In this case, the independent shortest path fora 1 would be a better response to theπ 2 thanπ 1: T(SIP s1,g1 , π2)< T(π 1, π2). This contradicts the assumption ...
-
[74]
that minimizes social welfare for two agents navigating a graph with m cooperation nodes. The algorithm starts by finding SIP s1 and SIP s2 (all shortest independent paths from the initial nodes to other graph nodes), and SIP g1 and SIP g2 (all shortest independent paths to the target nodes from other graph nodes) [lines 1-4]. These paths are then used to...
-
[75]
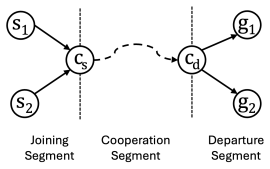
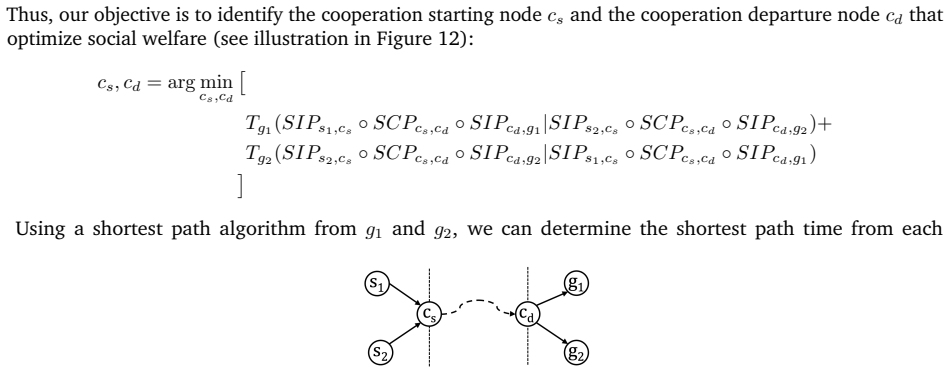
Cooperation Continuity:The joint strategy that optimizes social welfare through cooperation is one in which a1 and a2 independently follow the shortest paths to a cooperation starting node cs (SIP s1,cs , SIP s2,cs), cooperate along the joint shortest path to a cooperation departure node cd (SCP cs,cd), and then each independently follows the shortest pat...
-
[76]
Early Cooperation:If agents a1 and a2 can reach a cooperation nodec∈V C earlier through cooperation rather than individually, then c is not the first cooperation node in the joint strategy that optimizes social welfare. 34 Algorithm 6SOCIALWELFAREOPTIMALPATH(G, V C, s1, s2, g1, g2) 1:SIP s1 ←ALL SHORTEST PATHS FROM(G, τ 1, s1)▷Find shortest paths from sta...
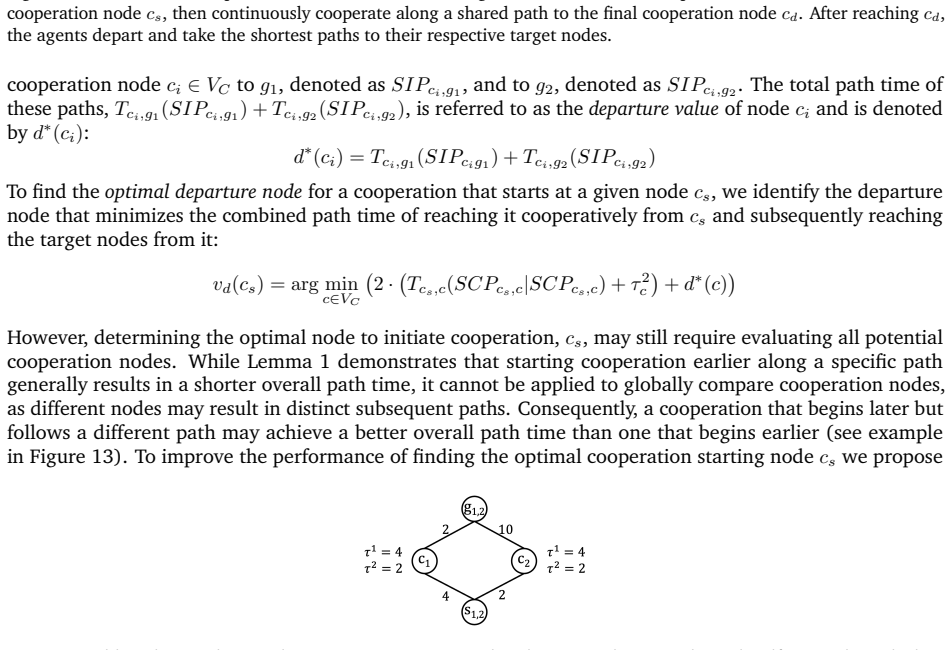
arXiv 1991
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.