Safe, Fluent and Acceptable Motion Generation and Execution for Human--Robot Interaction in Manufacturing Environments
Pith reviewed 2026-06-27 18:13 UTC · model grok-4.3
The pith
Model predictive control can generate four distinct robot behaviors whose differences change how acceptable humans find the system in shared manufacturing spaces.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Integrating social-aware motion control into robotic systems through an MPC framework that produces four distinct behaviors allows safety guarantees to be combined with interaction quality, and a user study confirms that these behavioral differences measurably alter the perceived social acceptability of the robot among non-expert participants.
What carries the argument
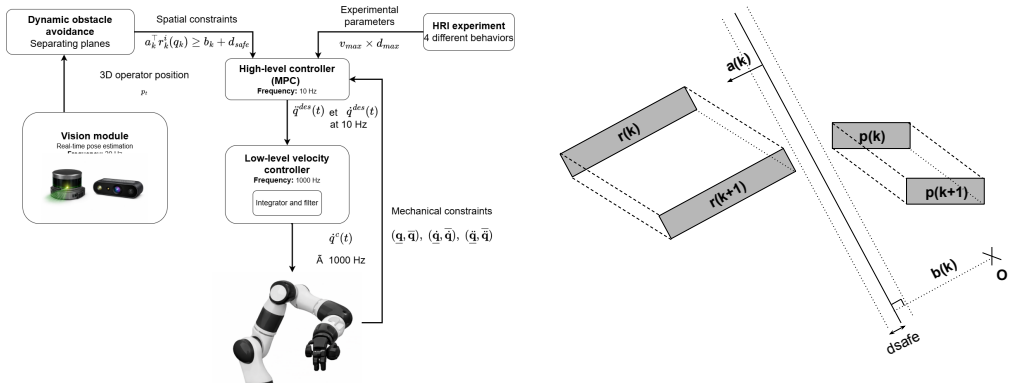
Model Predictive Control (MPC) framework that varies motion parameters to generate four distinct socially-informed robot behaviors while maintaining safety constraints.
If this is right
- Robot motion can simultaneously satisfy physical safety constraints and improve human comfort and fluency.
- Social acceptability becomes a controllable output of the motion planner rather than an after-the-fact property.
- Manufacturing cells can be tuned for higher operator acceptance without sacrificing collision-free operation.
- Designers gain a concrete method to trade off between different social qualities such as predictability and smoothness.
Where Pith is reading between the lines
- The same MPC structure could be extended to adapt behaviors online based on real-time human feedback signals.
- Results may generalize to other close-proximity tasks such as collaborative assembly or logistics if the motion parameters remain the dominant factors.
- If acceptability differences persist across cultures or expertise levels, the four behaviors could serve as standardized test cases for future social robotics studies.
Load-bearing premise
The four MPC-generated behaviors are meaningfully distinct to human observers and the user study with non-experts supplies an unbiased measure of social acceptability.
What would settle it
A replication of the user study that finds no statistically significant difference in acceptability ratings across the four behaviors would falsify the claim that behavior variation affects perceived social acceptability.
Figures
read the original abstract
Robots operating in human environments must not only ensure physical safety but also exhibit behaviors that are understandable, fluent, and acceptable to human partners. This paper investigates motion generation strategies that combine safety guarantees with interaction quality considerations, such as motion smoothness and human comfort. While the design of robots capable of ensuring safety in shared human-robot environments has enabled closer and more advanced forms of interaction, these new proximity-based tasks require moving beyond purely technical considerations. In particular, robot behavior must also be addressed from psycho-cognitive and social perspectives. In this context, we argue for the relevance of integrating social-aware motion control into robotic systems. First, we identify the motion parameters that influence human perception and operator experience. Then, we implement a Model Predictive Control (MPC) framework that generates four distinct socially-informed robot behaviors. Finally, we conduct a user study to evaluate and validate these behaviors and assess their social impact on non-expert participants. The results demonstrate that variations in robot behavior significantly affect the perceived social acceptability of the system. These findings highlight the importance of incorporating human-centered considerations into motion generation strategies for robots operating in shared environments.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
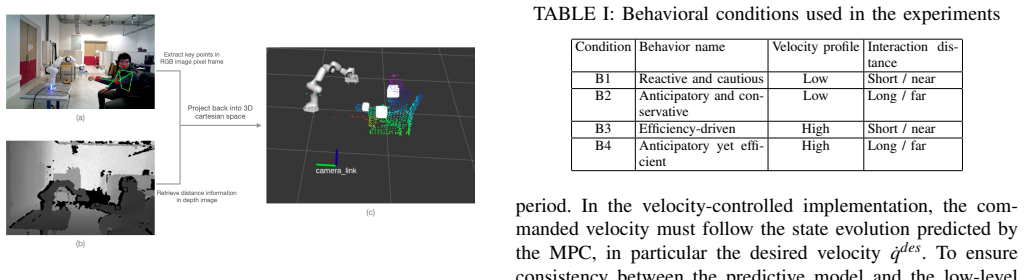
Summary. The paper identifies motion parameters (smoothness, comfort) that influence human perception in HRI, implements an MPC framework to generate four distinct socially-informed robot behaviors for manufacturing tasks, and reports a user study with non-expert participants whose results indicate that behavior variations significantly affect perceived social acceptability.
Significance. If the central result holds after addressing controls and reporting gaps, the work would provide concrete evidence that psycho-cognitive factors can be integrated into safety-constrained motion planners, strengthening the case for human-centered design in shared workspaces.
major comments (2)
- [Abstract / User Study] Abstract and user-study section: the claim that 'variations in robot behavior significantly affect the perceived social acceptability' is asserted without any description of the MPC cost functions, the four behavior parameterizations, the experimental protocol (including how trajectories were generated or matched), statistical tests, or participant data; this prevents verification that the evidence supports the headline result.
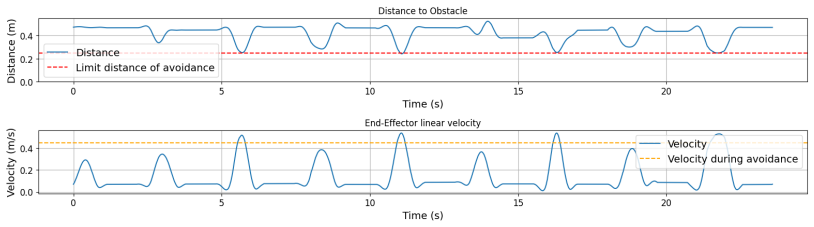
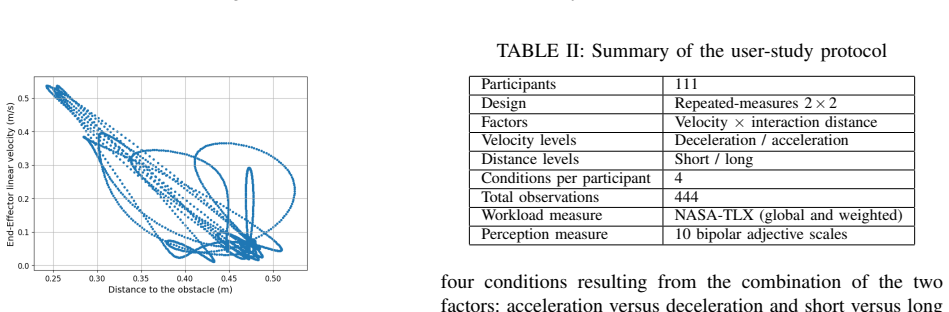
- [User Study] User-study design: the four MPC behaviors are not shown to have been matched on non-social kinematic quantities (duration, average velocity, total displacement); without such matching or explicit reporting, acceptability differences could be driven by these uncontrolled factors rather than the intended social parameters (smoothness, comfort).
minor comments (1)
- [MPC Framework] Notation for the MPC formulation and behavior parameters is not introduced with sufficient precision for reproducibility.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on the abstract and user-study design. We will revise the manuscript to provide the requested details and address the potential confounds.
read point-by-point responses
-
Referee: [Abstract / User Study] Abstract and user-study section: the claim that 'variations in robot behavior significantly affect the perceived social acceptability' is asserted without any description of the MPC cost functions, the four behavior parameterizations, the experimental protocol (including how trajectories were generated or matched), statistical tests, or participant data; this prevents verification that the evidence supports the headline result.
Authors: We agree the abstract is too concise to stand alone and will expand it to briefly describe the MPC cost functions, the four behavior parameterizations (differing in weights on smoothness and comfort terms), the experimental protocol, statistical tests used, and participant information. The full manuscript already contains these elements in Sections 3–5; the revision will make the abstract self-contained and add explicit cross-references so readers can verify the headline claim. revision: yes
-
Referee: [User Study] User-study design: the four MPC behaviors are not shown to have been matched on non-social kinematic quantities (duration, average velocity, total displacement); without such matching or explicit reporting, acceptability differences could be driven by these uncontrolled factors rather than the intended social parameters (smoothness, comfort).
Authors: This is a valid methodological concern. The four behaviors share the same start/goal positions and task constraints but were not explicitly matched on duration, velocity, or displacement. In the revision we will report these kinematic quantities for each behavior, either by adding a table or by re-optimizing the MPC weights to achieve closer matching where feasible, and will discuss any residual differences as a limitation or covariate in the analysis. revision: yes
Circularity Check
No circularity: empirical user study with no self-referential derivations
full rationale
The paper's chain consists of identifying motion parameters from perception, implementing an MPC controller to generate four behaviors, and running a user study to measure acceptability. No equations, fitted parameters renamed as predictions, or self-citation load-bearing steps appear in the provided text. The central result (behavior variations affect acceptability) rests on the external user-study data rather than reducing to its own inputs by construction. This is the normal case of a self-contained empirical robotics paper.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
The dlr lightweight robot: design and control concepts for robots in human environments,
A. Albu-Sch ¨affer, S. Haddadin, C. Ott, A. Stemmer, T. Wimb ¨ock, and G. Hirzinger, “The dlr lightweight robot: design and control concepts for robots in human environments,”Industrial Robot: an international journal, vol. 34, no. 5, pp. 376–385, 2007
2007
-
[2]
Human arm motion prediction for collision avoidance in a shared workspace,
P. Zheng, P.-B. Wieber, J. Baber, and O. Aycard, “Human arm motion prediction for collision avoidance in a shared workspace,”Sensors journal, 2022
2022
-
[3]
Online optimal motion gener- ation with guaranteed safety in shared workspace,
P. Zheng, P.-B. Wieber, and O. Aycard, “Online optimal motion gener- ation with guaranteed safety in shared workspace,” inICRA, 2020
2020
-
[4]
Safe human–robot collaboration for industrial settings: a survey,
W. Li, Y . Hu, Y . Zhou, and D. T. Pham, “Safe human–robot collaboration for industrial settings: a survey,”Journal of Intelligent Manufacturing, vol. 35, no. 5, pp. 2235–2261, 2024
2024
-
[5]
Safe physical HRI: Toward a unified treatment of speed and separation monitoring together with power and force limiting,
P. Svarny, M. Tesar, J. K. Behrens, and M. Hoffmann, “Safe physical HRI: Toward a unified treatment of speed and separation monitoring together with power and force limiting,” in2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Nov 2019, pp. 7580–7587
2019
-
[6]
Evaluating fluency in human–robot collaboration,
G. Hoffman, “Evaluating fluency in human–robot collaboration,”IEEE Transactions on Human-Machine Systems, vol. 49, no. 3, pp. 209–218, 2019
2019
-
[7]
A survey of methods for safe human–robot interaction,
P. A. Lasota, T. Fong, and J. A. Shah, “A survey of methods for safe human–robot interaction,”Foundations and Trends in Robotics, vol. 5, no. 4, pp. 261–349, 2017
2017
-
[8]
A human- aware mobile robot motion planner,
E. A. Sisbot, L. F. Marin-Urias, R. Alami, and T. Simeon, “A human- aware mobile robot motion planner,”IEEE Transactions on Robotics, vol. 23, no. 5, pp. 874–883, 2007
2007
-
[9]
Workspace overlap and cognitive load in human–robot collaboration,
S. e. a. Howell, “Workspace overlap and cognitive load in human–robot collaboration,”IEEE Transactions on Human-Machine Systems, 2019
2019
-
[10]
Legibility and predictability of robot motion,
A. D. Dragan, K. C. T. Lee, and S. S. Srinivasa, “Legibility and predictability of robot motion,” inProceedings of the 8th ACM/IEEE International Conference on Human-Robot Interaction (HRI), 2013, pp. 301–308
2013
-
[11]
Provably safe navigation for mobile robots with limited field-of-views in dynamic environments,
S. Bouraine, T. Fraichard, and H. Salhi, “Provably safe navigation for mobile robots with limited field-of-views in dynamic environments,” Autonomous Robots, vol. 32, no. 3, pp. 267–283, 2012
2012
-
[12]
Openpose: realtime multi-person 2d pose estimation using part affinity fields,
Z. Cao, G. Hidalgo, T. Simon, S.-E. Wei, and Y . Sheikh, “Openpose: realtime multi-person 2d pose estimation using part affinity fields,”IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 43, no. 1, pp. 172–186, 2019
2019
-
[13]
MediaPipe: A Framework for Building Perception Pipelines
C. Lugaresi, J. Tang, H. Nash, C. McClanahan, E. Uboweja, M. Hays, F. Zhang, C.-L. Chang, M. G. Yong, J. Leeet al., “Mediapipe: A framework for building perception pipelines,”arXiv preprint arXiv:1906.08172, 2019
work page internal anchor Pith review Pith/arXiv arXiv 1906
-
[14]
Point clouds with color: A simple open library for matching rgb and depth pixels from an uncalibrated stereo pair,
J. Nowak, P. Fraisse, A. Cherubini, and J.-P. Daures, “Point clouds with color: A simple open library for matching rgb and depth pixels from an uncalibrated stereo pair,” in2021 IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems (MFI). IEEE, 2021, pp. 1–7
2021
-
[15]
Effects of robot motion characteristics on human perception,
M. e. a. Story, “Effects of robot motion characteristics on human perception,”International Journal of Social Robotics, 2018
2018
-
[16]
Human-robot collaborative systems,
T. e. a. Arai, “Human-robot collaborative systems,”IEEE Transactions on Industrial Electronics, 2010
2010
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.