Optimal dynamical stabilization
Pith reviewed 2026-05-22 13:40 UTC · model grok-4.3
The pith
Dynamic stability requires return to original state only during discrete short durations within each period, selected by quantum-mechanical rules.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
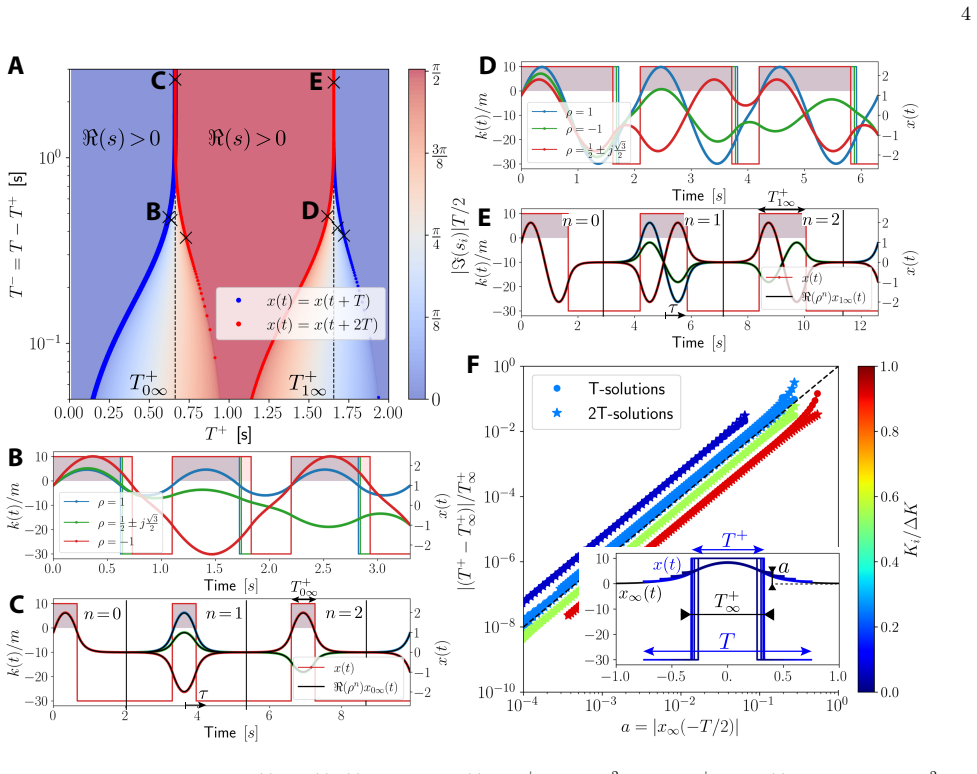
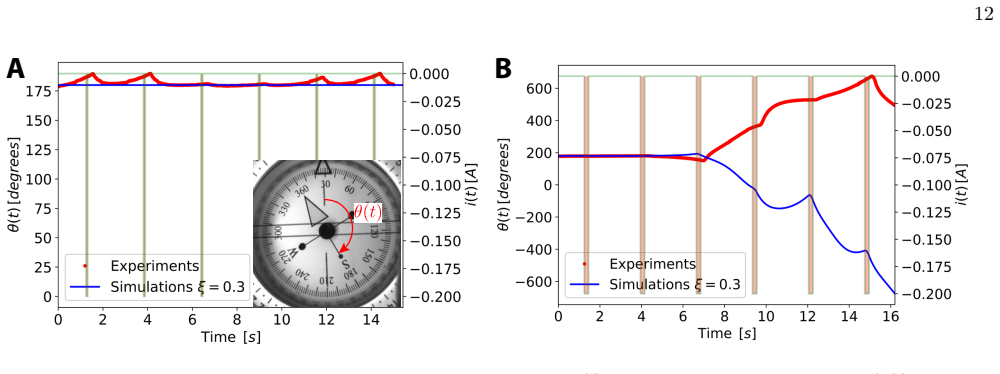
We show that the ability to return close to its original state only needs to be ensured over small but precisely defined durations within each period for the system to achieve dynamic stability. These precise durations form a discrete set, remarkably predicted by rules analogous to those of quantum mechanics. This framework is demonstrated for a linear mass-spring system with periodic stiffness variation and is applied to optimally trap the upside-down state of a compass in a time-varying magnetic field.
What carries the argument
The discrete set of short durations within each period of stiffness or field variation, whose locations are fixed by quantum-analogous selection rules and suffice to guarantee return to equilibrium for the periodically driven linear system.
If this is right
- The minimal amplitude of periodic stiffness variation needed for stability is determined solely by the lengths and placements of the discrete intervals.
- An inverted compass needle can be held in its unstable orientation using a magnetic field that varies only during the quantum-selected time windows.
- Control effort for other parametrically driven systems can be concentrated on these discrete intervals rather than applied continuously.
- The quantum analogy supplies a direct method to locate the stable durations without solving the full time-dependent stability problem.
Where Pith is reading between the lines
- Energy-efficient stabilization protocols in mechanical or electromagnetic systems could be designed by limiting active control to these brief windows.
- The same discrete selection principle may appear in other periodically forced systems such as chemical oscillators or population models.
- Physical experiments could measure the threshold stiffness amplitude at each predicted interval length to test the quantum-rule prediction directly.
- The underlying mechanism may be traceable to properties of Floquet multipliers for periodic coefficients, offering a mathematical route to generalize the result.
Load-bearing premise
The linear mass-spring system and the inverted compass can be treated with the same stability analysis that produces quantum-mechanical selection rules for the discrete durations without nonlinear corrections or post-hoc adjustments.
What would settle it
A simulation or experiment in which the mass-spring system or compass remains unstable when return-to-state is enforced exactly during the predicted discrete durations, or becomes stable when enforced outside those durations.
Figures





read the original abstract
Stability is a fundamental concept that refers to a system's ability to return close to its original state after disturbances. The minimal conditions for stability when system parameters vary in time, though common in physics, have been largely overlooked. Here, we study the minimal amount of periodic stiffness a linear mass-spring system requires to remain stable and apply our findings to optimally trap the upside-down state of a compass in a time-varying magnetic field. We show that the ability to return close to its original state only needs to be ensured over small but precisely defined durations within each period for the system to achieve dynamic stability. These precise durations form a discrete set, remarkably predicted by rules analogous to those of quantum mechanics. This unexpected connection opens new avenues for controlling dynamical systems.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript examines minimal conditions for dynamic stability under time-periodic parameter variation. For a linear mass-spring system it identifies the smallest periodic stiffness intervals sufficient for stability; these intervals form a discrete set whose locations are predicted by selection rules analogous to those of quantum mechanics. The same discrete durations are then applied to stabilize the inverted equilibrium of a compass whose orientation is controlled by a time-varying magnetic field.
Significance. If the central transfer from linear to nonlinear dynamics holds, the work supplies a concrete, low-effort protocol for optimal stabilization of parametrically driven systems and establishes an unexpected quantitative link between classical Floquet stability and quantum-like selection rules. Such a result would be of interest to the nonlinear-dynamics community and could motivate new control strategies for inverted pendula and related systems.
major comments (1)
- [Application to the inverted compass (section following the linear analysis)] The stability analysis and derivation of the discrete duration set are performed on the linear, time-periodic mass-spring system. The manuscript then asserts that the identical set stabilizes the inverted compass whose equation contains the nonlinear torque term proportional to sin θ. No explicit check (analytic continuation, numerical Floquet multiplier scan, or higher-order perturbation) is supplied showing that the predicted intervals remain stable once the nonlinear term is restored. This step is load-bearing for the headline claim that the QM-analogous durations work for both systems.
minor comments (2)
- [Linear mass-spring analysis] Notation for the periodic stiffness function and the precise definition of the 'small but precisely defined durations' should be introduced with an equation number in the linear-system section so that later references are unambiguous.
- [Abstract and introduction] The abstract states that the durations are 'remarkably predicted by rules analogous to those of quantum mechanics'; a one-sentence parenthetical in the main text clarifying whether the analogy arises from an exact mapping or from a formal similarity would help readers assess the strength of the claim.
Simulated Author's Rebuttal
We thank the referee for their careful reading of the manuscript and for highlighting the importance of explicitly verifying the extension from the linear mass-spring system to the nonlinear compass. We address the major comment below and have incorporated additional material to strengthen this aspect of the work.
read point-by-point responses
-
Referee: [Application to the inverted compass (section following the linear analysis)] The stability analysis and derivation of the discrete duration set are performed on the linear, time-periodic mass-spring system. The manuscript then asserts that the identical set stabilizes the inverted compass whose equation contains the nonlinear torque term proportional to sin θ. No explicit check (analytic continuation, numerical Floquet multiplier scan, or higher-order perturbation) is supplied showing that the predicted intervals remain stable once the nonlinear term is restored. This step is load-bearing for the headline claim that the QM-analogous durations work for both systems.
Authors: We agree that an explicit verification strengthens the central claim. In the original manuscript the compass application was motivated by the fact that near the inverted equilibrium the equation linearizes (sin θ ≈ θ − (θ − π)^3/6 + …), so the discrete intervals derived from the linear analysis remain relevant for small deviations. To make this rigorous we have now performed direct numerical time-stepping of the full nonlinear compass equation, applying the stiffness only during the predicted discrete intervals within each drive period. These integrations confirm that the inverted state (θ = π) is stabilized for the same set of durations, with trajectories returning close to equilibrium after perturbations of order 0.1 rad. We will add a dedicated subsection (or appendix) presenting the numerical protocol, representative trajectories, and a brief discussion of the range of validity. This revision directly addresses the referee’s concern without altering the core linear-analysis results. revision: yes
Circularity Check
No circularity: derivation from linear Floquet analysis to discrete durations is self-contained
full rationale
The paper first derives stability conditions for the linear time-periodic mass-spring system via standard Floquet theory on the Mathieu-like equation, obtaining explicit intervals for the durations where return-to-neighborhood is guaranteed. These intervals are then observed to satisfy a discrete selection rule that formally matches quantum-mechanical phase conditions. The mapping is presented as an emergent mathematical analogy rather than a fitted parameter or self-referential definition. The subsequent application to the inverted compass uses the same linear-derived durations as a candidate control law; while the nonlinear torque term introduces a correctness question, the derivation chain itself does not reduce any claimed prediction to its own inputs by construction, nor does it rely on load-bearing self-citations or smuggled ansatzes. The central result therefore remains independent of the target system.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption The mass-spring system and compass are accurately modeled as linear under periodic parameter variation
- ad hoc to paper Quantum-mechanical rules can be used analogously to predict the discrete stability durations in this classical system
Forward citations
Cited by 1 Pith paper
-
Wave-number lock-in in buckled elastic structures: an analogue to parametric instabilities
Compressed elastic strips with modulated height alternate between quasi-periodic and periodic buckling modes via wave-number lock-in, forming a static analogue to parametric instabilities.
Reference graph
Works this paper leans on
-
[1]
Also, assuming u+ > 0 and √ u+T ̸∈ 2πN∗, we can demonstrate we are in the normal case, i.e
than x(t) = −py(t)/|py(0)| and y(t) = px(t)/|py(0)| ∀t ∈ [0, T]. Also, assuming u+ > 0 and √ u+T ̸∈ 2πN∗, we can demonstrate we are in the normal case, i.e. p0 = −1, and there is no singular arc, i.e. u(t) is bang-bang. Thus, letting λ = 1 /|py(0)|, there is a unique optimal solution to Eqs.(A2)-(A3), with x(0) = x(T ) = 1 and y(0) = y(T ) = 0, such that ...
-
[2]
Optimal solution of the PMP When the period T becomes large, the optimal x(t) that minimize the quantity R T 0 u(t)dt exhibits some turn- pike properties: over long time T , “cheapest” trajectory is to approach the absolute minimumx(t) = y(t) = 0 and u(t) = u− as long as possible. But to fulfill the boundary conditions x(0) = x(T ) = 1 and y(0) = y(T ) = ...
-
[3]
Bound states of the stationary Schr¨ odinger equation We focus here on the linear equation ¨x(t) +u(t)x(t) = 0, where u(t) is the T -periodic modulation function with u(t) = u+ > 0 during T + and u(t) = u− < 0 during the rest of the period T − = T − T +. In the large T limit, the bounded solutions x(t) and the unknown duration T +, denoted x∞(τ) ans T + ∞...
-
[4]
The experiment consists in carefully orienting a com- pass along the main axis of two Helmholtz coils that are themselves collinear to the earth magnetic field. Doing so, the S −N axis of the compass is collinear to a uniform unidirectional magnetic field that is the sum of the earth magnetic field and a magnetic field eventually generated by a current i ...
-
[5]
A. Stephenson, Xx. on induced stability, The Lon- don, Edinburgh, and Dublin Philosophical Magazine and Journal of Science 15, 233 (1908)
work page 1908
-
[6]
Kapitsa, Pendulum with a vibrating suspension, Us- pekhi Fizicheskikh Nauk 44, 7 (1951)
P. Kapitsa, Pendulum with a vibrating suspension, Us- pekhi Fizicheskikh Nauk 44, 7 (1951)
work page 1951
-
[7]
L. D. Landau and E. M. Lifshitz, Mechanics, Vol. 1 (CUP Archive, 1960)
work page 1960
-
[8]
J. Bogdanoff and S. Citron, Experiments with an inverted pendulum subject to random parametric excitation, The Journal of the Acoustical Society of America 38, 447 (1965)
work page 1965
-
[9]
H. Smith and J. A. Blackburn, Experimental study of an inverted pendulum, American Journal of Physics 60, 909 (1992)
work page 1992
-
[10]
Acheson, Upside-down pendulums, Nature 366, 215 (1993)
D. Acheson, Upside-down pendulums, Nature 366, 215 (1993)
work page 1993
-
[11]
C. J. Richards, T. J. Smart, P. H. Jones, and D. Cubero, A microscopic kapitza pendulum, Scientific reports 8, 1 (2018)
work page 2018
- [12]
-
[13]
K. Kulikov, D. Anghel, A. Preda, M. Nashaat, M. Sameh, and Y. M. Shukrinov, Kapitza pendulum effects in a josephson junction coupled to a nanomagnet under ex- ternal periodic drive, Physical Review B 105, 094421 (2022)
work page 2022
-
[14]
W. Paul, Electromagnetic traps for charged and neutral particles, Reviews of modern physics 62, 531 (1990)
work page 1990
-
[15]
A. G. Marshall and C. L. Hendrickson, High-resolution mass spectrometers, Annu. Rev. Anal. Chem. 1, 579 (2008)
work page 2008
-
[16]
C. D. Bruzewicz, J. Chiaverini, R. McConnell, and J. M. Sage, Trapped-ion quantum computing: Progress and challenges, Applied Physics Reviews 6 (2019)
work page 2019
- [17]
-
[18]
S. Yin, E. Galiffi, and A. Al` u, Floquet metamaterials, ELight 2, 1 (2022)
work page 2022
-
[19]
Q. Wei, S. Kais, T. Yasuike, and D. Herschbach, Pendu- lar alignment and strong chemical binding are induced in helium dimer molecules by intense laser fields, Proceed- ings of the National Academy of Sciences 115, E9058 (2018)
work page 2018
-
[20]
A. Lazarus, Discrete dynamical stabilization of a natu- rally diverging mass in a harmonically time-varying po- tential, Physica D: Nonlinear Phenomena 386, 1 (2019)
work page 2019
-
[21]
A. A. Grandi, S. Proti` ere, and A. Lazarus, New physi- cal insights in dynamical stabilization: introducing peri- odically oscillating-diverging systems (pods), Nonlinear Dynamics 111, 12339 (2023)
work page 2023
-
[22]
D. E. Kirk, Optimal control theory: an introduction (Courier Corporation, 2004)
work page 2004
-
[23]
E. Tr´ elat, Optimal control and applications to aerospace: some results and challenges, Journal of Optimization Theory and Applications 154, 713 (2012)
work page 2012
-
[24]
E. T. Whittaker and G. N. Watson, A course of modern analysis (Cambridge university press, 1996)
work page 1996
-
[25]
J. A. Richards, Analysis of periodically time-varying sys- tems (Springer Science & Business Media, 2012)
work page 2012
-
[26]
A. Lazarus, C. Maurini, and S. Neukirch, Stability of discretize nonlinear elastic systems, in Extremely De- formable Structures, Vol. 562, edited by C. I. C. for Me- chanical Sciences (Springer, 2015) Chap. 1, pp. 1–53
work page 2015
-
[27]
E. Tr´ elat and A. Lazarus, A meaningful optimal con- trol problem in quantum and classical physics, Submitted (2025)
work page 2025
-
[28]
Messiah, Quantum mechanics (North-Holland, Ams- terdam, 1961)
A. Messiah, Quantum mechanics (North-Holland, Ams- terdam, 1961)
work page 1961
-
[29]
G. Floquet, Sur la th´ eorie des ´ equations diff´ erentielles lin´ eaires, inAnnales Scientifiques de l’Ecole Normale Su- perieure, Vol. 8 (1879) pp. 3–132
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.