Unifying Object-Centric World Models and Diffusion Policy: A Hierarchical Framework for Multi-Stage Robotic Tasks
Pith reviewed 2026-06-27 18:06 UTC · model grok-4.3
The pith
A hierarchical framework pairs an object-centric world model for subgoal planning with a diffusion policy for execution to handle multi-stage robotic tasks.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The paper claims that using an object-centric world model to optimize subgoals during runtime and feeding those subgoals to a diffusion policy for low-level control produces better results on multi-stage manipulation than either component alone or existing baselines.
What carries the argument
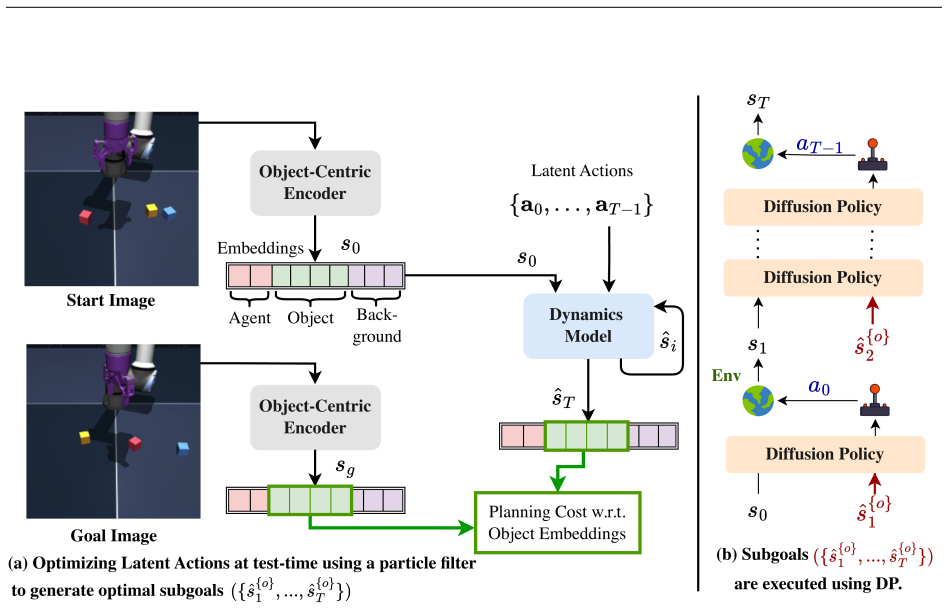
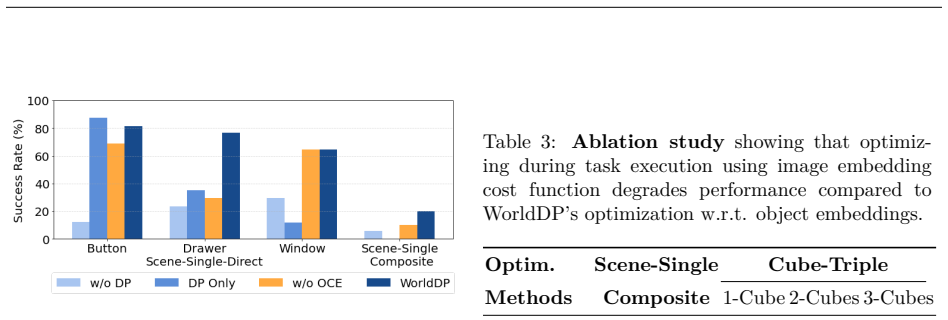
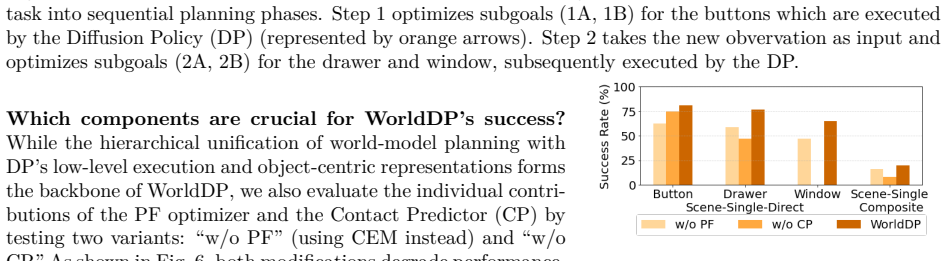
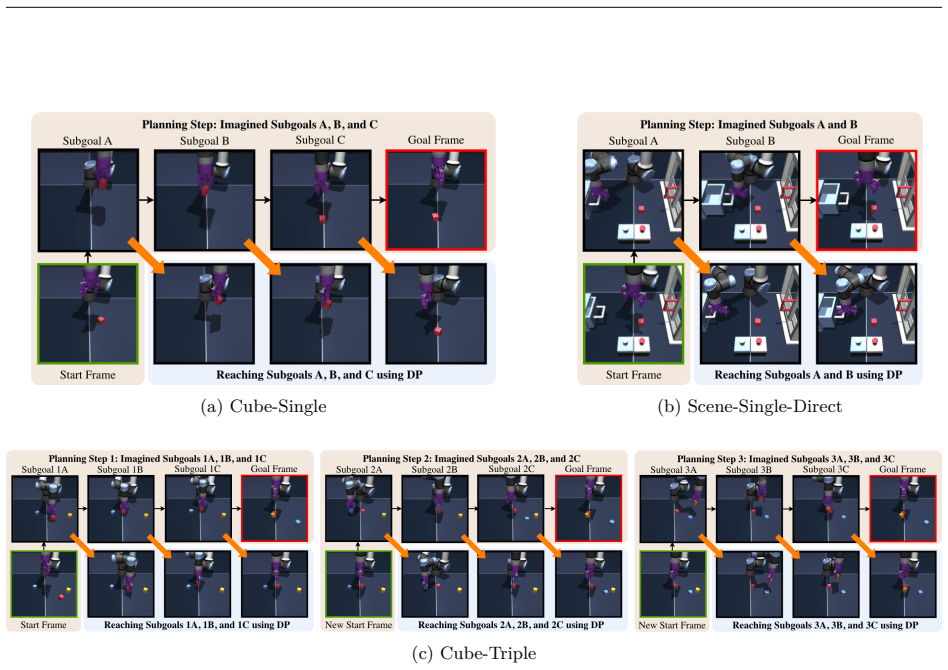
The hierarchical WorldDP structure, in which the high-level world model optimizes feasible subgoals via object-centric representations and the low-level diffusion policy reaches them.
If this is right
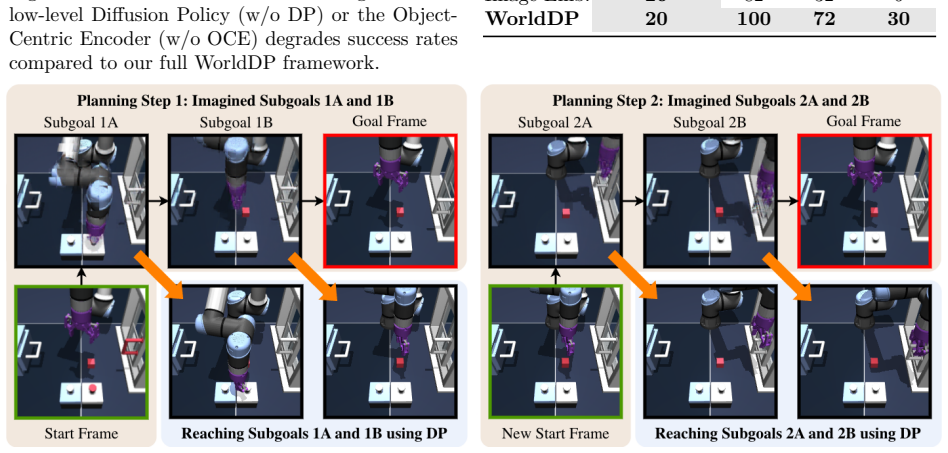
- The approach enables sequential planning with respect to each decoupled object rather than the entire environment.
- Coupling physically grounded planning from the world model with efficient execution from the diffusion policy improves multi-stage task success.
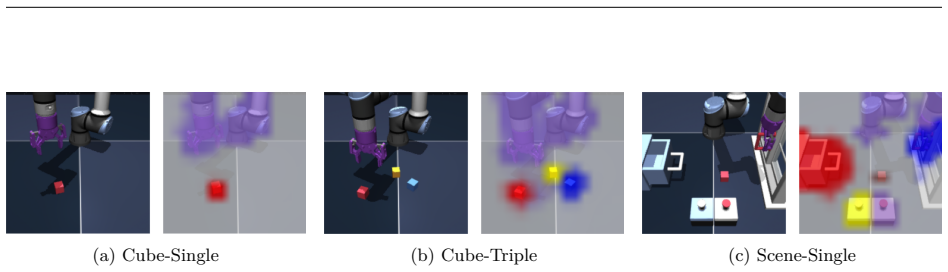
- Object-centric decoupling aids both dynamics learning and runtime subgoal selection in manipulation settings.
- The framework extends world-model MPC beyond single-stage reaching or grasping to full sequential tasks.
Where Pith is reading between the lines
- The same subgoal-planning pattern could be tested in non-robotic sequential control domains such as game playing or process scheduling.
- Replacing the diffusion policy with another low-level controller would isolate whether the performance gain comes mainly from the world-model layer.
- Running the same hierarchy on physical hardware rather than simulation would reveal whether the object-centric representations transfer without additional tuning.
Load-bearing premise
The high-level world model can optimize for feasible subgoals at runtime using object-centric representations that decouple environmental entities.
What would settle it
A direct comparison on the same multi-stage benchmarks where WorldDP shows no consistent advantage over the strongest single-stage baselines would falsify the performance claim.
Figures

read the original abstract
Visual world models have shown great potential in learning complex system dynamics. Recent advancements leverage these models as transition functions within Model Predictive Control (MPC) frameworks to solve various control tasks. When applied to robotics, however, they are limited to single-stage tasks such as reaching or grasping, and struggle with multi-stage ones that demand complex sequential planning. In this work, we introduce WorldDP, a world model framework designed for multi-stage robotic manipulation. Our hierarchical approach utilizes a high-level world model as a transition function to optimize for feasible subgoals during runtime, which are subsequently reached by a low-level Diffusion Policy. To further aid in learning dynamics and planning, we incorporate object-centric representations that decouple environmental entities and enable us to plan sequentially with respect to each. Evaluated across several robotics benchmarks, WorldDP consistently outperforms existing baselines, validating that coupling the world model's physically grounded planning with diffusion policy's efficient execution yields superior multi-stage performance.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces WorldDP, a hierarchical framework for multi-stage robotic manipulation. A high-level world model with object-centric representations serves as a transition function to optimize feasible subgoals at runtime; these subgoals are then executed by a low-level Diffusion Policy. The central claim is that this coupling of physically grounded planning and efficient execution yields consistent outperformance over baselines on robotics benchmarks.
Significance. If the empirical claims hold, the work could advance hierarchical model-based control in robotics by extending world models beyond single-stage tasks through object-centric sequential planning. The proposed unification addresses a recognized limitation in applying MPC-style world models to complex manipulation.
major comments (2)
- [Abstract] Abstract: the claim that WorldDP 'consistently outperforms existing baselines' supplies no metrics, baselines, error bars, dataset details, or ablation results, rendering the central empirical claim impossible to assess.
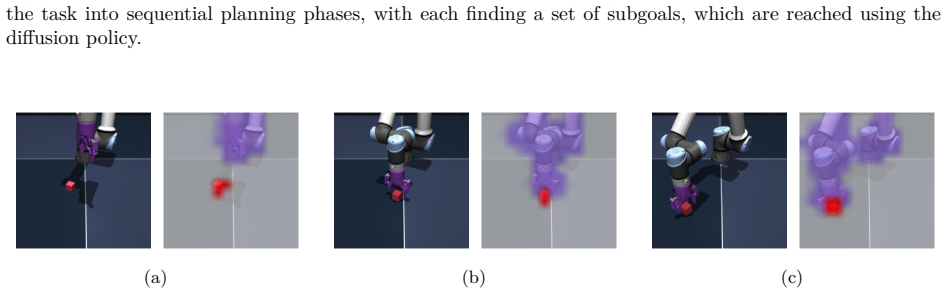
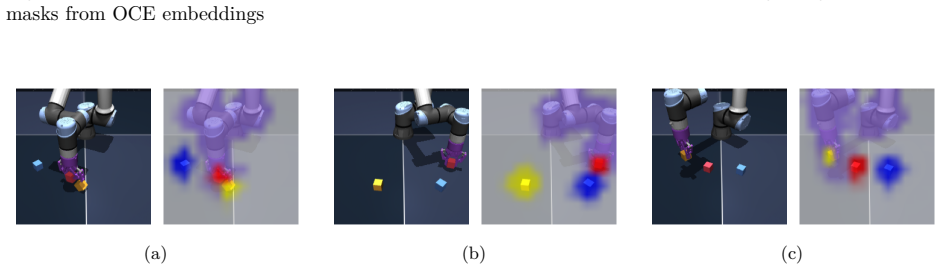
- [Abstract] Abstract: the assertion that object-centric representations 'decouple environmental entities and enable us to plan sequentially with respect to each' provides no mechanism (interaction terms, joint latent state, or constraint layer) to preserve subgoal feasibility under physical couplings between objects, which is load-bearing for multi-stage tasks such as assembly or stacking.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive comments. We address each major point below and will make revisions to strengthen the abstract and clarify key aspects of the framework.
read point-by-point responses
-
Referee: [Abstract] Abstract: the claim that WorldDP 'consistently outperforms existing baselines' supplies no metrics, baselines, error bars, dataset details, or ablation results, rendering the central empirical claim impossible to assess.
Authors: We agree that the abstract, as a high-level summary, omits specific quantitative details. The full manuscript reports these results in the experiments section, including success rates, baselines (e.g., standard diffusion policies and MPC variants), error bars across multiple seeds, and ablations on the hierarchical components. We will revise the abstract to incorporate concise key metrics and dataset references to make the empirical claims more self-contained. revision: yes
-
Referee: [Abstract] Abstract: the assertion that object-centric representations 'decouple environmental entities and enable us to plan sequentially with respect to each' provides no mechanism (interaction terms, joint latent state, or constraint layer) to preserve subgoal feasibility under physical couplings between objects, which is load-bearing for multi-stage tasks such as assembly or stacking.
Authors: The abstract statement summarizes the object-centric design, but the full paper details the mechanism in the high-level world model (Section 3), where object-centric latents are processed with explicit interaction terms in the transition function to model physical couplings and ensure feasible subgoals. We will add a short clarifying phrase to the abstract (and expand the introduction) to reference this interaction modeling, addressing the concern about physical feasibility in coupled tasks. revision: partial
Circularity Check
No circularity: empirical hierarchical framework without derivational reductions
full rationale
The paper describes WorldDP as a hierarchical system using a high-level world model for runtime subgoal optimization via object-centric representations, followed by low-level diffusion policy execution. No equations, derivations, fitted parameters renamed as predictions, or load-bearing self-citations appear in the provided text. All claims rest on empirical benchmark evaluations rather than any self-referential construction, making the approach self-contained.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Mido Assran, Adrien Bardes, David Fan, Quentin Garrido, Russell Howes, Matthew Muckley, Ammar Rizvi, Claire Roberts, Koustuv Sinha, Artem Zholus, et al. V-jepa 2: Self-supervised video models enable understanding, prediction and planning.arXiv preprint arXiv:2506.09985,
-
[2]
Adrien Bardes, Quentin Garrido, Jean Ponce, Xinlei Chen, Michael Rabbat, Yann LeCun, Mahmoud Assran, and Nicolas Ballas. Revisiting feature prediction for learning visual representations from video.arXiv preprint arXiv:2404.08471,
-
[3]
Gr00t n1: An open foundation model for generalist humanoid robots.arXiv preprint arXiv:2503.14734,
Johan Bjorck, Fernando Castañeda, Nikita Cherniadev, Xingye Da, Runyu Ding, Linxi Fan, Yu Fang, Dieter Fox, Fengyuan Hu, Spencer Huang, et al. Gr00t n1: An open foundation model for generalist humanoid robots.arXiv preprint arXiv:2503.14734,
-
[4]
Worldvla: Towards autoregressive action world model.arXiv preprint arXiv:2506.21539,
Jun Cen, Chaohui Yu, Hangjie Yuan, Yuming Jiang, Siteng Huang, Jiayan Guo, Xin Li, Yibing Song, Hao Luo, Fan Wang, et al. Worldvla: Towards autoregressive action world model.arXiv preprint arXiv:2506.21539,
-
[5]
Simple hierarchical planning with diffusion.arXiv preprint arXiv:2401.02644,
Chang Chen, Fei Deng, Kenji Kawaguchi, Caglar Gulcehre, and Sungjin Ahn. Simple hierarchical planning with diffusion.arXiv preprint arXiv:2401.02644,
-
[6]
Jinwoo Choi, Sang-Hyun Lee, and Seung-Woo Seo. Chain-of-goals hierarchical policy for long-horizon offline goal-conditioned rl.arXiv preprint arXiv:2602.03389,
-
[7]
Jonathan Collu, Riccardo Majellaro, Aske Plaat, and Thomas M Moerland. Slot structured world models. arXiv preprint arXiv:2402.03326,
-
[8]
13 Tal Daniel and Aviv Tamar. Unsupervised image representation learning with deep latent particles.arXiv preprint arXiv:2205.15821,
-
[9]
Tal Daniel, Carl Qi, Dan Haramati, Amir Zadeh, Chuan Li, Aviv Tamar, Deepak Pathak, and David Held. Latent particle world models: Self-supervised object-centric stochastic dynamics modeling.arXiv preprint arXiv:2603.04553,
-
[10]
Kuan Fang, Yuke Zhu, Animesh Garg, Silvio Savarese, and Li Fei-Fei. Dynamics learning with cascaded variational inference for multi-step manipulation.arXiv preprint arXiv:1910.13395,
arXiv 1910
-
[11]
World models can leverage human videos for dexterous manipulation.arXiv preprint arXiv:2512.13644,
Raktim Gautam Goswami, Amir Bar, David Fan, Tsung-Yen Yang, Gaoyue Zhou, Prashanth Krishnamurthy, Michael Rabbat, Farshad Khorrami, and Yann LeCun. World models can leverage human videos for dexterous manipulation.arXiv preprint arXiv:2512.13644,
-
[12]
World models.arXiv preprint arXiv:1803.10122, 2(3):440,
David Ha and Jürgen Schmidhuber. World models.arXiv preprint arXiv:1803.10122, 2(3):440,
-
[13]
Td-mpc2: Scalable, robust world models for continuous control
Nick Hansen, Hao Su, and Xiaolong Wang. Td-mpc2: Scalable, robust world models for continuous control. InInternational Conference on Learning Representations, volume 2024, pp. 47376–47405,
2024
-
[14]
Dan Haramati, Carl Qi, Tal Daniel, Amy Zhang, Aviv Tamar, and George Konidaris. Hierarchical entity- centric reinforcement learning with factored subgoal diffusion.arXiv preprint arXiv:2602.02722,
-
[15]
World model for robot learning: A comprehensive survey.arXiv preprint arXiv:2605.00080,
Bohan Hou, Gen Li, Jindou Jia, Tuo An, Xinying Guo, Sicong Leng, Haoran Geng, Yanjie Ze, Tatsuya Harada, Philip Torr, et al. World model for robot learning: A comprehensive survey.arXiv preprint arXiv:2605.00080,
-
[16]
Openvla: An open-source vision-language- action model.arXiv preprint arXiv:2406.09246,
Moo Jin Kim, Karl Pertsch, Siddharth Karamcheti, Ted Xiao, Ashwin Balakrishna, Suraj Nair, Rafael Rafailov, Ethan Foster, Grace Lam, Pannag Sanketi, et al. Openvla: An open-source vision-language- action model.arXiv preprint arXiv:2406.09246,
-
[17]
A path towards autonomous machine intelligence version 0.9
Yann LeCun. A path towards autonomous machine intelligence version 0.9. 2, 2022-06-27.Open Review, 62 (1):1–62,
2022
-
[18]
Decoupled weight decay regularization.arXiv preprint arXiv:1711.05101,
Ilya Loshchilov and Frank Hutter. Decoupled weight decay regularization.arXiv preprint arXiv:1711.05101,
-
[19]
Lucas Maes, Quentin Le Lidec, Dan Haramati, Nassim Massaudi, Damien Scieur, Yann LeCun, and Randall Balestriero. stable-worldmodel-v1: Reproducible world modeling research and evaluation.arXiv preprint arXiv:2602.08968, 2026a. Lucas Maes, Quentin Le Lidec, Damien Scieur, Yann LeCun, and Randall Balestriero. Leworldmodel: Stable end-to-end joint-embedding ...
-
[20]
Malte Mosbach, Jan Niklas Ewertz, Angel Villar-Corrales, and Sven Behnke. Sold: Slot object-centric latent dynamics models for relational manipulation learning from pixels.arXiv preprint arXiv:2410.08822,
-
[21]
Dinov2: Learning robust visual features without supervision.arXiv preprint arXiv:2304.07193,
Maxime Oquab, Timothée Darcet, Théo Moutakanni, Huy Vo, Marc Szafraniec, Vasil Khalidov, Pierre Fernandez, Daniel Haziza, Francisco Massa, Alaaeldin El-Nouby, et al. Dinov2: Learning robust visual features without supervision.arXiv preprint arXiv:2304.07193,
-
[22]
Ogbench: Benchmarking offline goal- conditioned rl
Seohong Park, Kevin Frans, Benjamin Eysenbach, and Sergey Levine. Ogbench: Benchmarking offline goal- conditioned rl. InInternational Conference on Learning Representations, volume 2025, pp. 94937–94982,
2025
-
[23]
Physical Intelligence, Kevin Black, Noah Brown, James Darpinian, Karan Dhabalia, Danny Driess, Adnan Esmail, Michael Equi, Chelsea Finn, Niccolo Fusai, et al. pi0.5: a vision-language-action model with open-world generalization.arXiv preprint arXiv:2504.16054,
-
[24]
Parallel stochastic gradient-based planning for world models.arXiv preprint arXiv:2602.00475,
Michael Psenka, Michael Rabbat, Aditi Krishnapriyan, Yann LeCun, and Amir Bar. Parallel stochastic gradient-based planning for world models.arXiv preprint arXiv:2602.00475,
-
[25]
Ec-diffuser: Multi-object manipulation via entity-centric behavior generation
Carl Qi, Dan Haramati, Tal Daniel, Aviv Tamar, and Amy Zhang. Ec-diffuser: Multi-object manipulation via entity-centric behavior generation. InInternational Conference on Learning Representations, volume 2025, pp. 74835–74858,
2025
-
[26]
Sam 2: Segment anything in images and videos
Nikhila Ravi, Valentin Gabeur, Yuan-Ting Hu, Ronghang Hu, Chaitanya Ryali, Tengyu Ma, Haitham Khedr, Roman Rädle, Chloe Rolland, Laura Gustafson, et al. Sam 2: Segment anything in images and videos. In International Conference on Learning Representations, volume 2025, pp. 28085–28128,
2025
-
[27]
Basile Terver, Tsung-Yen Yang, Jean Ponce, Adrien Bardes, and Yann LeCun. What drives success in physical planning with joint-embedding predictive world models?arXiv preprint arXiv:2512.24497,
-
[28]
Ziyi Wu, Nikita Dvornik, Klaus Greff, Thomas Kipf, and Animesh Garg. Slotformer: Unsupervised visual dynamics simulation with object-centric models.arXiv preprint arXiv:2210.05861,
-
[29]
World action models are zero-shot policies.arXiv preprint arXiv:2602.15922,
Seonghyeon Ye, Yunhao Ge, Kaiyuan Zheng, Shenyuan Gao, Sihyun Yu, George Kurian, Suneel Indupuru, You Liang Tan, Chuning Zhu, Jiannan Xiang, et al. World action models are zero-shot policies.arXiv preprint arXiv:2602.15922,
-
[30]
Hierarchical planning with latent world models
15 Wancong Zhang, Basile Terver, Artem Zholus, Soham Chitnis, Harsh Sutaria, Mido Assran, Randall Balestriero, Amir Bar, Adrien Bardes, Yann LeCun, et al. Hierarchical planning with latent world models. arXiv preprint arXiv:2604.03208,
-
[31]
Gaoyue Zhou, Hengkai Pan, Yann LeCun, and Lerrel Pinto. Dino-wm: World models on pre-trained visual features enable zero-shot planning.arXiv preprint arXiv:2411.04983,
-
[32]
Table 4: Hyperparameter configurations for the Object-Centric Encoder
with an initial learning rate of10−3, which is decayed to10−6via a one-cycle learning rate scheduler with cosine annealing (Smith & Topin, 2019). Table 4: Hyperparameter configurations for the Object-Centric Encoder. Slot Corrector Slot Decoder Dataset Num Slots Slot Dim. Num. iter. Hidden Dim. Layers Hidden Dim. Cube-Single 3 64 3 128 3 384 Cube-Triple 5...
2019
-
[33]
A.3 Diffusion Policy
with an initial learning rate of10−4, which is decayed to10−7via a one-cycle learning rate scheduler with cosine annealing (Smith & Topin, 2019). A.3 Diffusion Policy. Apart from the input dimension, which scales with the slot dimension and the number of slots, all other parameters of the diffusion policy transformer remain constant across datasets. Speci...
2019
-
[34]
A.4 Contact Predictor The contact predictor consists of two linear layers separated by a SiLU activation function (Elfwing et al., 2018)
with an initial learning rate of10−4and a weight decay of10−6. A.4 Contact Predictor The contact predictor consists of two linear layers separated by a SiLU activation function (Elfwing et al., 2018). It takes the mean of the DINOv2 patch-level representations as input and outputs a vector corre- sponding to the number of manipulable objects in the enviro...
2018
-
[35]
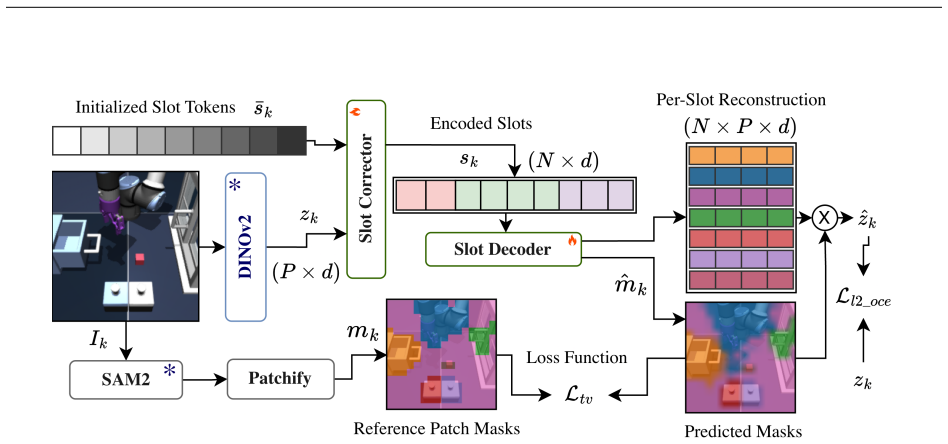
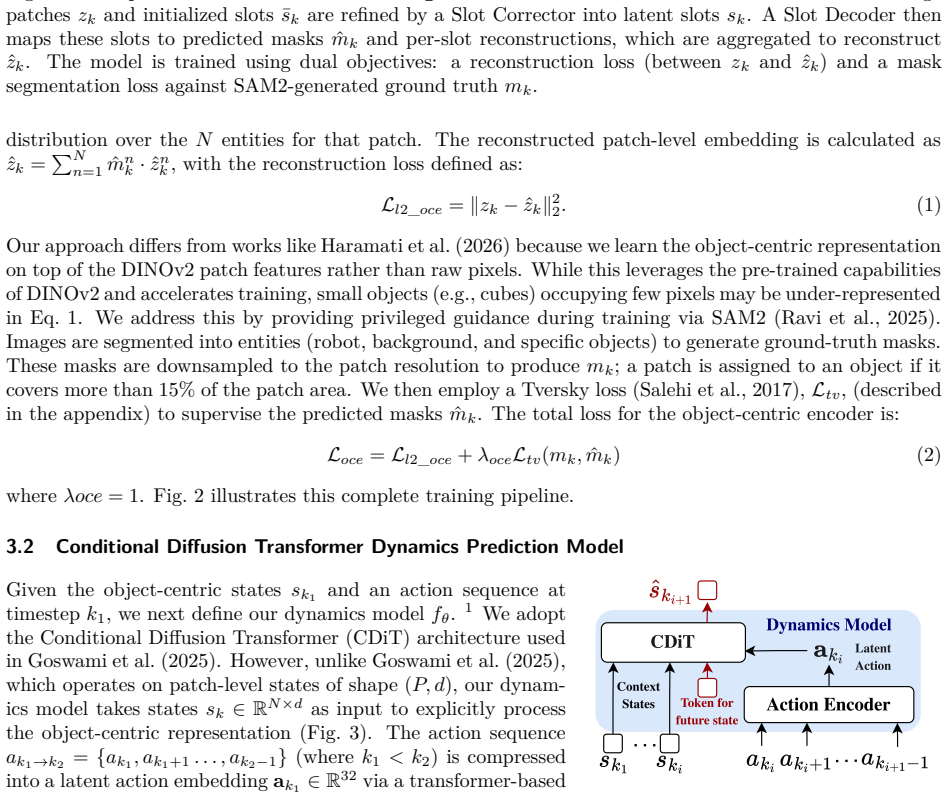
B Tversky Loss As described in Section 3.1, to supervise predicted masks during object-centric encoder training, we employ the Tversky loss function (Salehi et al., 2017)
with an initial learning rate of10−3, which decays to10−6via a one-cycle learning rate scheduler with cosine annealing (Smith & Topin, 2019). B Tversky Loss As described in Section 3.1, to supervise predicted masks during object-centric encoder training, we employ the Tversky loss function (Salehi et al., 2017). Given predicted (ˆmk) and ground-truth (mk)...
2019
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.