Importance-Aware Semantic Segmentation with Efficient Pyramidal Context Network for Navigational Assistant Systems
Pith reviewed 2026-05-24 16:17 UTC · model grok-4.3
The pith
Redesigning loss to weight traffic elements by safety importance yields better segmentation for vehicles and navigation aids.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Conventional loss functions like cross entropy have not taken the different levels of importance of diverse traffic elements into consideration; we leverage and re-design an importance-aware loss function, throwing insightful hints on how importance of semantics are assigned for real-world applications, and extend ERF-PSPNet to BiERF-PSPNet which can yield high-quality segmentation maps with finer spatial details exceptionally suitable for autonomous vehicles.
What carries the argument
The importance-aware loss function that assigns hierarchical weights to semantic classes based on their safety relevance in traffic scenes, combined with the bidirectional pyramidal context processing in BiERF-PSPNet.
If this is right
- Segmentation outputs become more reliable for downstream navigation decisions that must prioritize collision avoidance over background accuracy.
- The same network family can be customized for both wearable pedestrian devices and vehicle-mounted cameras without major architectural overhaul.
- Insights from the loss re-design indicate how to assign semantic importance in other safety-critical vision tasks.
- Real-time performance is retained while spatial detail improves, supporting deployment on resource-limited platforms.
Where Pith is reading between the lines
- The weighting scheme could be tested on additional driving datasets to check if the importance hierarchy transfers without retraining the weights.
- Combining the loss with post-processing steps like conditional random fields might further sharpen boundaries around high-importance classes.
- If importance weights were made learnable rather than fixed, the method could adapt to new environments or sensor setups.
Load-bearing premise
Conventional cross-entropy loss has not accounted for hierarchical importance of traffic elements and a re-designed importance-aware loss will produce practically useful improvements without post-hoc tuning or dataset-specific adjustments.
What would settle it
Running the importance-aware loss versus standard cross-entropy on Cityscapes and measuring whether mean IoU on safety-critical classes such as person, rider, car, truck, bus, and train shows no consistent gain would falsify the central claim.
Figures






read the original abstract
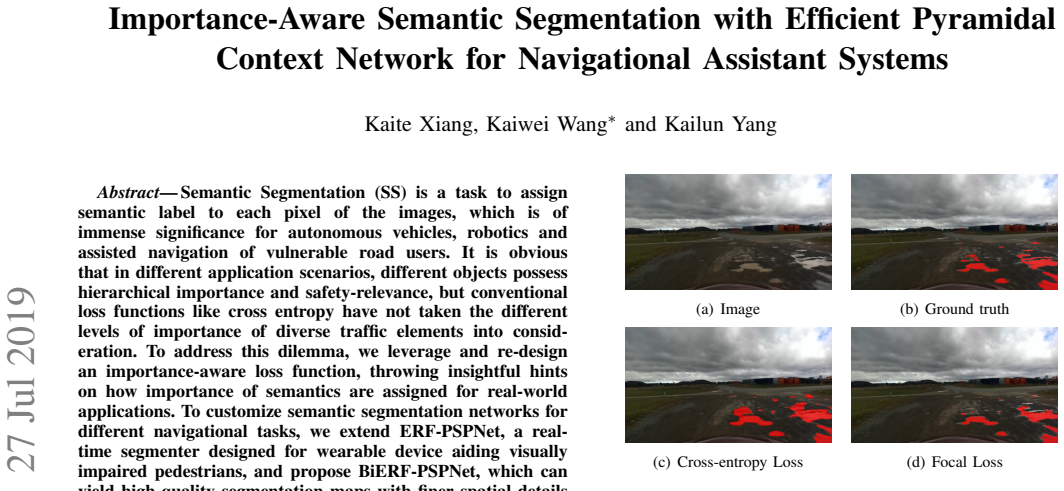
Semantic Segmentation (SS) is a task to assign semantic label to each pixel of the images, which is of immense significance for autonomous vehicles, robotics and assisted navigation of vulnerable road users. It is obvious that in different application scenarios, different objects possess hierarchical importance and safety-relevance, but conventional loss functions like cross entropy have not taken the different levels of importance of diverse traffic elements into consideration. To address this dilemma, we leverage and re-design an importance-aware loss function, throwing insightful hints on how importance of semantics are assigned for real-world applications. To customize semantic segmentation networks for different navigational tasks, we extend ERF-PSPNet, a real-time segmenter designed for wearable device aiding visually impaired pedestrians, and propose BiERF-PSPNet, which can yield high-quality segmentation maps with finer spatial details exceptionally suitable for autonomous vehicles. A comprehensive variety of experiments with these efficient pyramidal context networks on CamVid and Cityscapes datasets demonstrates the effectiveness of our proposal to support diverse navigational assistant systems.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims that conventional cross-entropy loss ignores hierarchical importance of traffic elements in navigational scenarios; it re-designs an importance-aware loss to address this and introduces BiERF-PSPNet (an extension of ERF-PSPNet) to produce higher-quality segmentation maps suitable for autonomous vehicles. Experiments on CamVid and Cityscapes are said to demonstrate the effectiveness of both the loss and the network for diverse navigational assistant systems.
Significance. If the importance-aware loss can be shown to yield generalizable gains via a transferable assignment rule rather than dataset-specific tuning, the work would address a practical limitation in loss design for safety-critical segmentation. The BiERF-PSPNet extension of a real-time architecture is a secondary but potentially useful contribution for wearable and vehicle applications.
major comments (2)
- [Abstract] Abstract: the central claim that the re-designed importance-aware loss 'throws insightful hints on how importance of semantics are assigned for real-world applications' and produces practically useful improvements is unsupported by any quantitative results, ablation studies, error analysis, or details on the loss redesign; this prevents verification that gains occur without post-hoc or dataset-specific adjustments.
- [Loss function section] Loss function (section describing importance-aware loss): if semantic importance weights are assigned via fixed safety heuristics tuned to CamVid/Cityscapes (e.g., elevated weight for pedestrians) without an explicit transferable assignment procedure, weight-sensitivity ablation, or cross-dataset transfer experiments, the generalization claim is at risk and the 'insightful hints' assertion does not hold.
minor comments (1)
- [Abstract] Abstract, final sentence: the phrasing 'throwing insightful hints' is imprecise and should be replaced with a clearer description of the contribution.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address each major comment below and will revise the paper to strengthen the presentation of results and clarify the loss design.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim that the re-designed importance-aware loss 'throws insightful hints on how importance of semantics are assigned for real-world applications' and produces practically useful improvements is unsupported by any quantitative results, ablation studies, error analysis, or details on the loss redesign; this prevents verification that gains occur without post-hoc or dataset-specific adjustments.
Authors: We agree that the abstract would benefit from more explicit quantitative support. The manuscript body reports mIoU improvements on both CamVid and Cityscapes when using the importance-aware loss versus standard cross-entropy, along with ablation comparisons of the network variants. In the revision we will update the abstract to cite these specific gains and point to the loss redesign details and ablations already present in Sections 3 and 4, enabling readers to verify the improvements without dataset-specific post-hoc tuning. revision: yes
-
Referee: [Loss function section] Loss function (section describing importance-aware loss): if semantic importance weights are assigned via fixed safety heuristics tuned to CamVid/Cityscapes (e.g., elevated weight for pedestrians) without an explicit transferable assignment procedure, weight-sensitivity ablation, or cross-dataset transfer experiments, the generalization claim is at risk and the 'insightful hints' assertion does not hold.
Authors: The weight assignment follows a safety-priority heuristic (higher weights for vulnerable road users and vehicles) that is stated as a general rule applicable to navigational scenarios rather than tuned per dataset. To strengthen the claim we will add an explicit description of the assignment procedure as a transferable safety-based rule and include a weight-sensitivity ablation showing robustness to moderate weight perturbations. Cross-dataset transfer experiments for the loss alone are not currently reported; the consistent gains across CamVid and Cityscapes provide supporting evidence, but we acknowledge this as a limitation that future work could address. revision: partial
Circularity Check
No circularity; derivation is self-contained with independent experiments
full rationale
The paper re-designs an importance-aware loss and extends ERF-PSPNet to BiERF-PSPNet, validated via experiments on CamVid and Cityscapes. No equations, fitted parameters renamed as predictions, or self-citation chains appear in the provided text that reduce the central claims to inputs by construction. The importance weighting is presented as a design choice supported by application-specific experiments rather than a self-referential definition or imported uniqueness theorem. This is the normal case of an empirical proposal with no detectable circular reduction.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Different objects possess hierarchical importance and safety-relevance in navigational scenarios.
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
we adapt and re-design an importance-aware loss function... categorize the classes into three importance groups... M1 and M2... IAL = I1 + (f1 +α)· I2 + (f2 +α)· (f3 +α)· I3
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
hierarchical importance... roadways and sidewalks... cars and pedestrians... sky and buildings
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
K. Yang, X. Hu, L. M. Bergasa, E. Romera, X. Huang, D. Sun, and K. Wang, “Can we pass beyond the field of view? panoramic annular semantic segmentation for real-world surrounding perception,” in 2019 IEEE Intelligent V ehicles Symposium (IV). IEEE, 2019, pp. 374–381
work page 2019
-
[2]
Fully convolutional networks for semantic segmentation,
J. Long, E. Shelhamer, and T. Darrell, “Fully convolutional networks for semantic segmentation,” in 2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). IEEE, 2015, pp. 3431–3440
work page 2015
-
[3]
Pyramid scene parsing network,
H. Zhao, J. Shi, X. Qi, X. Wang, and J. Jia, “Pyramid scene parsing network,” in 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR) . IEEE, 2017, pp. 6230–6239
work page 2017
-
[4]
L.-C. Chen, G. Papandreou, I. Kokkinos, K. Murphy, and A. L. Yuille, “Deeplab: Semantic image segmentation with deep convolutional nets, atrous convolution, and fully connected crfs,” IEEE transactions on pattern analysis and machine intelligence , vol. 40, no. 4, pp. 834– 848, 2018
work page 2018
-
[5]
Unifying terrain awareness through real-time semantic segmentation,
K. Yang, L. M. Bergasa, E. Romera, R. Cheng, T. Chen, and K. Wang, “Unifying terrain awareness through real-time semantic segmentation,” in 2018 IEEE Intelligent V ehicles Symposium (IV) . IEEE, 2018, pp. 1033–1038
work page 2018
-
[6]
Semantic perception of curbs beyond traversability for real-world navigation assistance systems,
K. Yang, L. M. Bergasa, E. Romera, D. Sun, K. Wang, and R. Barea, “Semantic perception of curbs beyond traversability for real-world navigation assistance systems,” in2018 IEEE International Conference on V ehicular Electronics and Safety (ICVES) . IEEE, 2018, pp. 1–7
work page 2018
-
[7]
Focal loss for dense object detection,
T.-Y . Lin, P. Goyal, R. Girshick, K. He, and P. Doll ´ar, “Focal loss for dense object detection,” in 2017 IEEE International Conference on Computer Vision (ICCV) . IEEE, 2017, pp. 2999–3007
work page 2017
-
[8]
Single image water hazard detection using fcn with reflection attention units,
X. Han, C. Nguyen, S. You, and J. Lu, “Single image water hazard detection using fcn with reflection attention units,” in Proceedings of the European Conference on Computer Vision (ECCV) , 2018, pp. 105–120
work page 2018
-
[9]
Importance-aware semantic seg- mentation for autonomous vehicles,
B. Chen, C. Gong, and J. Yang, “Importance-aware semantic seg- mentation for autonomous vehicles,” IEEE Transactions on Intelligent Transportation Systems, no. 99, pp. 1–12, 2018
work page 2018
-
[10]
Segmentation and recognition using structure from motion point clouds,
G. J. Brostow, J. Shotton, J. Fauqueur, and R. Cipolla, “Segmentation and recognition using structure from motion point clouds,” in Euro- pean conference on computer vision . Springer, 2008, pp. 44–57
work page 2008
-
[11]
The cityscapes dataset for semantic urban scene understanding,
M. Cordts, M. Omran, S. Ramos, T. Rehfeld, M. Enzweiler, R. Be- nenson, U. Franke, S. Roth, and B. Schiele, “The cityscapes dataset for semantic urban scene understanding,” in 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR) . IEEE, 2016, pp. 3213–3223
work page 2016
-
[12]
U-net: Convolutional networks for biomedical image segmentation,
O. Ronneberger, P. Fischer, and T. Brox, “U-net: Convolutional networks for biomedical image segmentation,” inInternational Confer- ence on Medical image computing and computer-assisted intervention . Springer, 2015, pp. 234–241
work page 2015
-
[13]
ENet: A Deep Neural Network Architecture for Real-Time Semantic Segmentation
A. Paszke, A. Chaurasia, S. Kim, and E. Culurciello, “Enet: A deep neural network architecture for real-time semantic segmentation,” arXiv preprint arXiv:1606.02147 , 2016
work page internal anchor Pith review Pith/arXiv arXiv 2016
-
[14]
Deep residual learning for image recognition,
K. He, X. Zhang, S. Ren, and J. Sun, “Deep residual learning for image recognition,” in 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR) . IEEE, 2016, pp. 770–778
work page 2016
-
[15]
Erfnet: Effi- cient residual factorized convnet for real-time semantic segmentation,
E. Romera, J. M. Alvarez, L. M. Bergasa, and R. Arroyo, “Erfnet: Effi- cient residual factorized convnet for real-time semantic segmentation,” IEEE Transactions on Intelligent Transportation Systems , vol. 19, no. 1, pp. 263–272, 2018
work page 2018
-
[16]
Bridging the day and night domain gap for semantic segmentation,
E. Romera, L. M. Bergasa, K. Yang, J. M. Alvarez, and R. Barea, “Bridging the day and night domain gap for semantic segmentation,” in 2019 IEEE Intelligent V ehicles Symposium (IV) . IEEE, 2019, pp. 1184–1190
work page 2019
-
[17]
Icnet for real-time semantic segmentation on high-resolution images,
H. Zhao, X. Qi, X. Shen, J. Shi, and J. Jia, “Icnet for real-time semantic segmentation on high-resolution images,” in Proceedings of the European Conference on Computer Vision (ECCV) , 2018, pp. 405– 420
work page 2018
-
[18]
Bisenet: Bilateral segmentation network for real-time semantic segmentation,
C. Yu, J. Wang, C. Peng, C. Gao, G. Yu, and N. Sang, “Bisenet: Bilateral segmentation network for real-time semantic segmentation,” in Proceedings of the European Conference on Computer Vision (ECCV), 2018, pp. 325–341
work page 2018
-
[19]
ContextNet: Exploring Context and Detail for Semantic Segmentation in Real-time
R. P. Poudel, U. Bonde, S. Liwicki, and C. Zach, “Contextnet: Exploring context and detail for semantic segmentation in real-time,” arXiv preprint arXiv:1805.04554 , 2018
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[20]
Not all pixels are equal: Difficulty-aware semantic segmentation via deep layer cascade,
X. Li, Z. Liu, P. Luo, C. C. Loy, and X. Tang, “Not all pixels are equal: Difficulty-aware semantic segmentation via deep layer cascade,” in 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). IEEE, 2017, pp. 6459–6468
work page 2017
-
[21]
Attribute-aware semantic segmentation of road scenes for understanding pedestrian orientations,
M. Sulistiyo, Y . Kawanishi, D. Deguchi, T. Hirayama, I. Ide, J. Zheng, and H. Mutase, “Attribute-aware semantic segmentation of road scenes for understanding pedestrian orientations,” in 2018 21st International Conference on Intelligent Transportation Systems (ITSC) . IEEE, 2018, pp. 2698–2703
work page 2018
-
[22]
Attention to scale: Scale-aware semantic image segmentation,
L.-C. Chen, Y . Yang, J. Wang, W. Xu, and A. L. Yuille, “Attention to scale: Scale-aware semantic image segmentation,” in 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR) . IEEE, 2016, pp. 3640–3649
work page 2016
-
[23]
Loss max-pooling for semantic image segmentation,
S. R. Bulo, G. Neuhold, and P. Kontschieder, “Loss max-pooling for semantic image segmentation,” in 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). IEEE, 2017, pp. 7082–7091
work page 2017
-
[24]
Application of Decision Rules for Handling Class Imbalance in Semantic Segmentation
R. Chan, M. Rottmann, F. H ¨uger, P. Schlicht, and H. Gottschalk, “Application of decision rules for handling class imbalance in semantic segmentation,” arXiv preprint arXiv:1901.08394 , 2019
work page internal anchor Pith review Pith/arXiv arXiv 1901
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.