Embodied Opinion Dynamics for Safety-Critical Motion Control in Dynamic Environments
Pith reviewed 2026-06-27 05:46 UTC · model grok-4.3
The pith
Embedding nonlinear opinion dynamics in vehicle kinematics lets an ego vehicle adaptively merge or stay safe under uncertainty.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
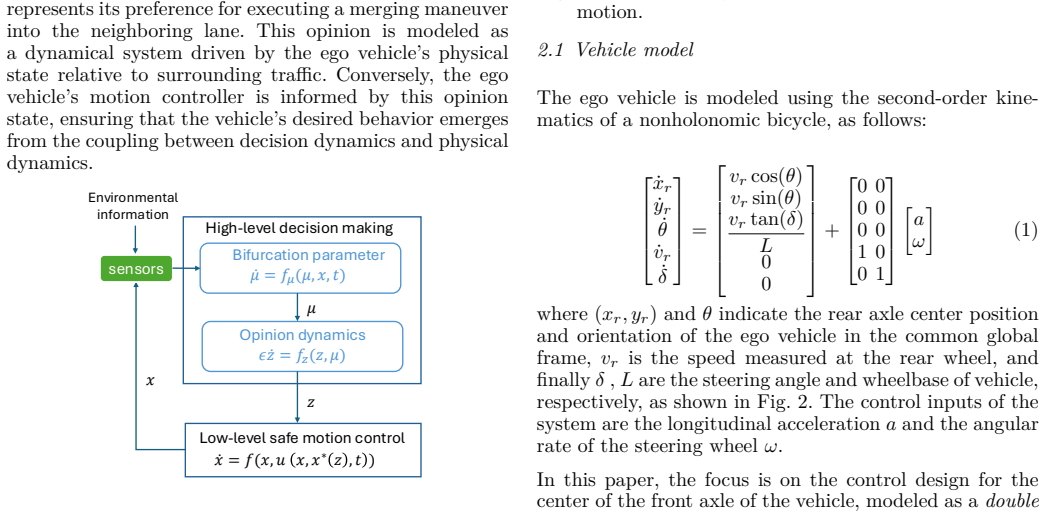
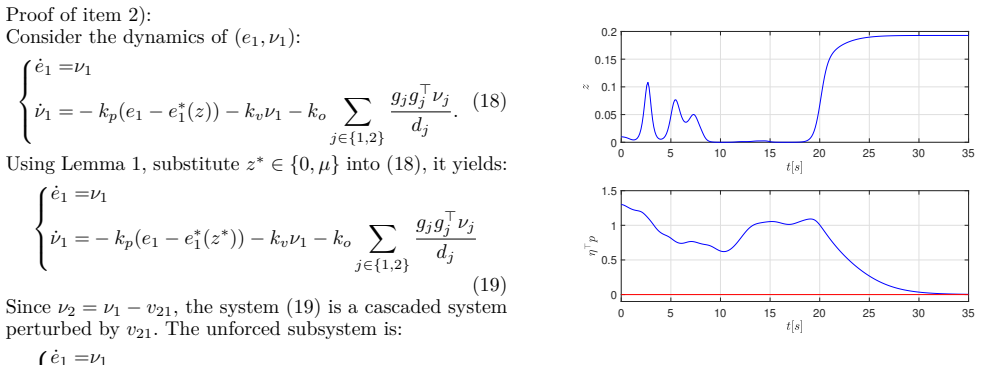
The framework embeds nonlinear opinion dynamics within the dynamical sensorimotor layers governed by second-order nonholonomic bicycle kinematics. This construction enables the ego vehicle to adaptively select and execute merging versus non-merging behaviors in response to changing environmental conditions while providing formal safety guarantees together with equilibrium and stability analyses of the closed-loop system.
What carries the argument
Nonlinear opinion dynamics embedded within the dynamical sensorimotor layers governed by second-order nonholonomic bicycle kinematics; it supplies the adaptive decision signal while the kinematic model enforces physically realizable motion.
If this is right
- The ego vehicle selects merging or non-merging actions adaptively as environmental conditions change.
- Formal safety guarantees hold for the closed-loop system under the stated interaction uncertainty.
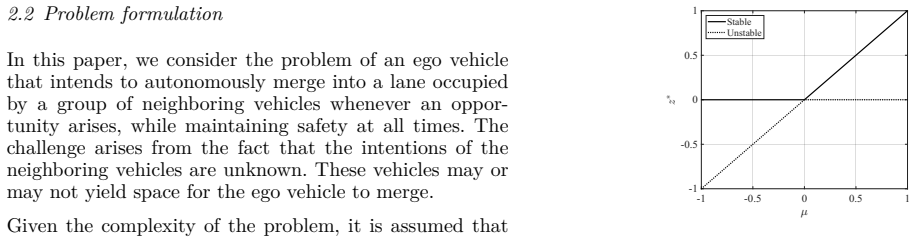
- Equilibrium points and stability properties of the combined opinion-motion dynamics can be characterized analytically.
- Numerical simulations confirm that the approach produces effective merging behavior across varying neighbor intentions.
Where Pith is reading between the lines
- The same embedding technique could be tested in other interactive maneuvers such as lane changing or intersection crossing.
- Stability margins derived for the closed-loop system might be used to tune opinion dynamics parameters before deployment.
- The approach suggests a route for combining continuous opinion updating with discrete high-level planners in larger autonomy stacks.
Load-bearing premise
That nonlinear opinion dynamics can be embedded within the dynamical sensorimotor layers governed by second-order nonholonomic bicycle kinematics while still allowing formal safety guarantees to be derived for the closed-loop system.
What would settle it
A concrete simulation or experiment in which the closed-loop trajectory produced by the embedded opinion dynamics collides with another agent or violates a stated safety constraint.
Figures
read the original abstract
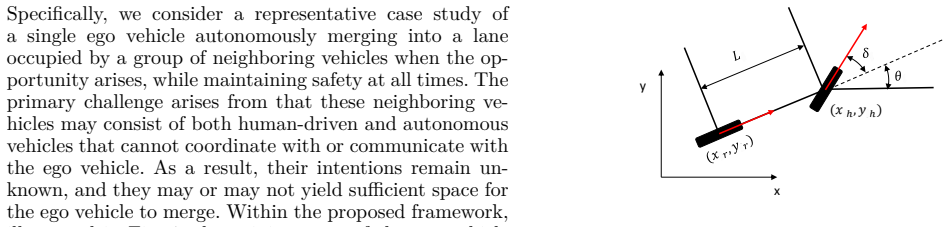
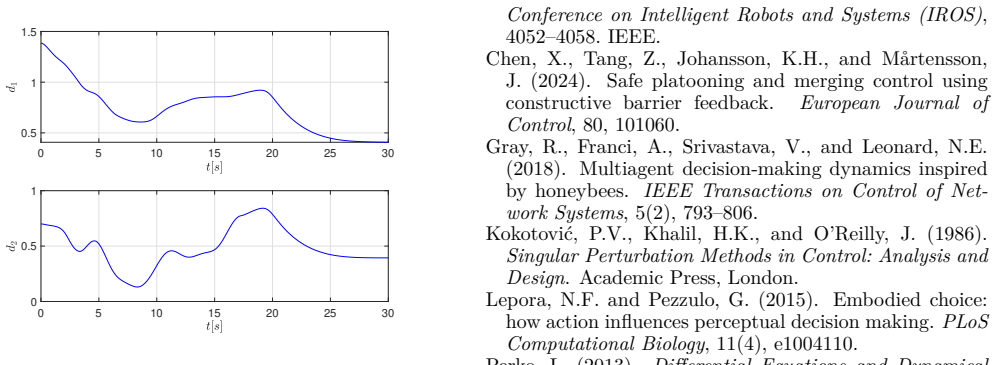
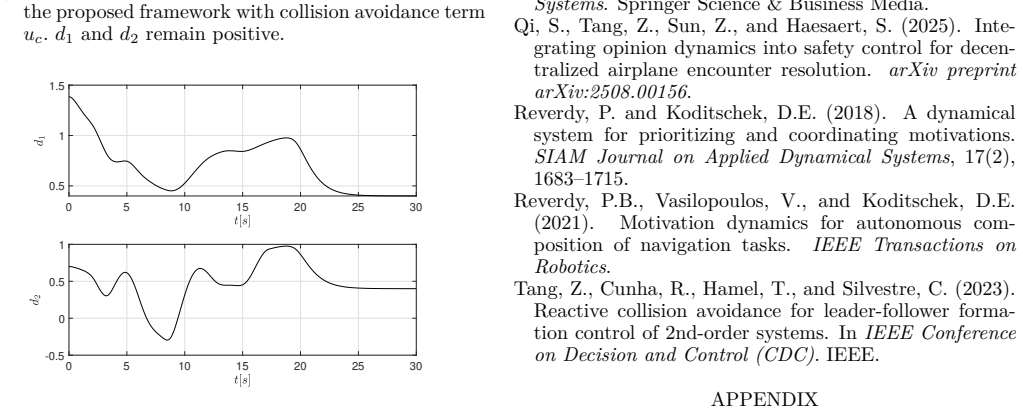
This paper proposes a novel adaptive control framework that embeds nonlinear opinion dynamics within the dynamical sensorimotor layers of an automated vehicle governed by second-order nonholonomic bicycle kinematics. The framework enables an ego vehicle to perform adaptive decision-making and achieve safe motion control under interaction uncertainty with non-cooperative neighboring agents. We consider a representative case study in which an ego vehicle autonomously attempts to merge into a lane occupied by human-driven or automated vehicles whose intentions are unknown. Within the proposed framework, the ego vehicle adaptively selects and executes merging versus non-merging behaviors in response to changing environmental conditions. Formal safety guarantees, as well as equilibrium and stability analyses of the closed-loop system, are provided. Numerical simulations further demonstrate the effectiveness of the proposed approach.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a novel adaptive control framework embedding nonlinear opinion dynamics into the second-order nonholonomic bicycle kinematics of an ego vehicle. This enables adaptive selection between merging and non-merging behaviors in lane-merging scenarios with non-cooperative agents of unknown intentions. The work claims formal safety guarantees for the closed-loop system along with equilibrium and stability analyses, supported by numerical simulations.
Significance. If the embedding of opinion dynamics into the kinematic model preserves the ability to certify safety for the full closed-loop system (kinematic plus opinion states), the framework could provide a useful approach to integrating decision-making with low-level control under interaction uncertainty. The explicit equilibrium and stability analyses would be a strength if they rigorously close the loop without unstated boundedness assumptions.
major comments (2)
- [Abstract and safety guarantees section] Abstract and the section presenting formal safety guarantees: the central claim requires that nonlinear opinion dynamics can be coupled into the bicycle model while still allowing formal safety certificates (e.g., via control barrier functions or similar) to be derived for the full closed-loop system; the manuscript does not make explicit how the proofs account for the opinion vector field without hidden Lipschitz or boundedness assumptions on the opinion dynamics.
- [Equilibrium and stability analyses] The equilibrium and stability analyses: these must explicitly include the opinion states in the closed-loop vector field to support the stability claims; it is unclear whether the analyses treat the opinion dynamics as fully coupled or rely on exogenous-input assumptions that would not hold under the embedding.
minor comments (1)
- [Abstract] The abstract could more precisely indicate the specific safety certificate method (e.g., CBF, ISS, or Lyapunov) used for the closed-loop system.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on the integration of nonlinear opinion dynamics with the nonholonomic kinematics and the requirements for explicit safety and stability arguments. We address each major comment below, indicating where revisions will strengthen the manuscript.
read point-by-point responses
-
Referee: Abstract and the section presenting formal safety guarantees: the central claim requires that nonlinear opinion dynamics can be coupled into the bicycle model while still allowing formal safety certificates (e.g., via control barrier functions or similar) to be derived for the full closed-loop system; the manuscript does not make explicit how the proofs account for the opinion vector field without hidden Lipschitz or boundedness assumptions on the opinion dynamics.
Authors: We agree that the safety section would benefit from greater explicitness regarding the opinion vector field. The nonlinear opinion dynamics are constructed to be Lipschitz continuous with bounded trajectories by design (see the model in Section III), and the CBF-based safety proofs in Section IV are stated for the augmented state that includes both kinematic and opinion variables. To eliminate any ambiguity, we will add a supporting lemma in the revised safety guarantees section that derives the Lipschitz constant and uniform boundedness of the opinion dynamics over the compact set induced by the barrier function, confirming that the CBF conditions hold without additional assumptions. revision: yes
-
Referee: The equilibrium and stability analyses: these must explicitly include the opinion states in the closed-loop vector field to support the stability claims; it is unclear whether the analyses treat the opinion dynamics as fully coupled or rely on exogenous-input assumptions that would not hold under the embedding.
Authors: The equilibrium and stability results treat the system as fully coupled: the closed-loop vector field is the concatenation of the second-order bicycle kinematics (with control input depending on the opinion state) and the opinion dynamics themselves. No exogenous-input treatment is employed. To make this fully transparent, the revised manuscript will explicitly write the augmented closed-loop vector field at the beginning of the equilibrium analysis subsection and include the corresponding Jacobian matrix for the combined kinematic-opinion state in the local stability argument. revision: yes
Circularity Check
No significant circularity detected
full rationale
The paper introduces a novel adaptive control framework by embedding nonlinear opinion dynamics into second-order nonholonomic bicycle kinematics, then derives formal safety guarantees along with equilibrium and stability analyses for the closed-loop system. No load-bearing steps reduce to self-definition, fitted inputs renamed as predictions, or self-citation chains; the central claims rest on the embedding and subsequent analysis rather than circular reduction to inputs. The derivation chain is self-contained against external benchmarks with no quoted evidence of the enumerated circularity patterns.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Vehicle motion obeys second-order nonholonomic bicycle kinematics.
Reference graph
Works this paper leans on
-
[1]
2007 46th IEEE Conference on Decision and Control , pages=
Control of directed formations with a leader-first follower structure , author=. 2007 46th IEEE Conference on Decision and Control , pages=. 2007 , organization=
2007
-
[2]
IEEE Control Systems Magazine , volume=
Rigid graph control architectures for autonomous formations , author=. IEEE Control Systems Magazine , volume=. 2008 , publisher=
2008
-
[3]
Adami, T.M. and Zhu, J.J. , booktitle=. 6DOF flight control of fixed-wing aircraft by Trajectory Linearization , year=. doi:10.1109/ACC.2011.5991521 , ISSN=
-
[4]
Dynamic Games and Applications , volume=
Opinion dynamics and learning in social networks , author=. Dynamic Games and Applications , volume=. 2011 , publisher=
2011
-
[5]
and Shafique, K
Ahsan, M. and Shafique, K. and Bin Mansoor, A. and Mushtaq, M. , booktitle=. Performance comparison of two altitude-control algorithms for a fixed-wing UAV , year=
-
[6]
Aerospace Industries Association (AIA) , title =
-
[7]
Micaelli and C
A. Micaelli and C. Samson , title =
-
[8]
2013 , issn =
Modelling the location and consequences of aircraft accidents , journal =. 2013 , issn =
2013
-
[9]
Ascending Technologies , author =
-
[10]
Autonomous Robots , volume=
Collision avoidance for aerial vehicles in multi-agent scenarios , author=. Autonomous Robots , volume=. 2015 , publisher=
2015
-
[11]
The International Journal of Robotics Research , volume=
Sensor-based reactive navigation in unknown convex sphere worlds , author=. The International Journal of Robotics Research , volume=. 2019 , publisher=
2019
-
[12]
Swarm Intelligence , pages=
Analysis and control of agreement and disagreement opinion cascades , author=. Swarm Intelligence , pages=. 2021 , publisher=
2021
-
[13]
2024 European Control Conference (ECC) , pages=
Threshold decision-making dynamics adaptive to physical constraints and changing environment , author=. 2024 European Control Conference (ECC) , pages=. 2024 , organization=
2024
-
[14]
IEEE Control Systems Letters , year=
Spatially-invariant opinion dynamics on the circle , author=. IEEE Control Systems Letters , year=
-
[15]
Barron, J. L. and Fleet, D. J. and Beauchemin, S. S. , title =. International Journal of Computer Vision , year =
-
[16]
1998 , publisher=
The Flight Dynamics: The Equations , author=. 1998 , publisher=
1998
-
[17]
and Hamel, T
Bertrand, S. and Hamel, T. and Piet-Lahanier, H. , title =. European Control Conference (ECC) , address =
-
[18]
Blake and Griffiths, Stephen R
Barber, D. Blake and Griffiths, Stephen R. and McLain, Timothy W. and Beard, Randal W. , Doi =. Autonomous Landing of Miniature Aerial Vehicles , Volume =. Journal of Aerospace Computing, Information, and Communication , Month =
-
[19]
and Chaumette, F
Bourquardez, O. and Chaumette, F. , booktitle=. Visual servoing of an airplane for auto-landing , year=
-
[20]
IEEE Transactions on Systems, Man, and Cybernetics, Part C (Applications and Reviews) , volume=
A comprehensive survey of multiagent reinforcement learning , author=. IEEE Transactions on Systems, Man, and Cybernetics, Part C (Applications and Reviews) , volume=. 2008 , publisher=
2008
-
[21]
Beyeler, Antoine and Zufferey, Jean-Christophe and Floreano, Dario , pages=. Autonomous Robots , volume=. 2009 , issn=. doi:10.1007/s10514-009-9139-6 , title=
-
[22]
Beyeler, Antoine and Zufferey, Jean-Christophe and Floreano, Dario , booktitle =
-
[23]
Systems & Control Letters , volume=
Distributed control of triangular formations with angle-only constraints , author=. Systems & Control Letters , volume=. 2010 , publisher=
2010
-
[24]
IFAC Proceedings Volumes , volume=
A very relaxed control law for bearing-only triangular formation control , author=. IFAC Proceedings Volumes , volume=. 2011 , publisher=
2011
-
[25]
Batista, P. and Silvestre, C. and Oliveira, P. , journal=. Sensor-Based Globally Asymptotically Stable Filters for Attitude Estimation: Analysis, Design, and Performance Evaluation , year=. doi:10.1109/TAC.2012.2187142 , ISSN=
-
[26]
Control Engineering Practice , volume =
Globally exponentially stable cascade observers for attitude estimation , author =. Control Engineering Practice , volume =. 2012 , issn =. doi:http://dx.doi.org/10.1016/j.conengprac.2011.10.005 , keywords =
-
[27]
Bourquardez, O. and Mahony, R. and Guenard, N. and Chaumette, F. and Hamel, T. and Eck, L. , journal=. Image-Based Visual Servo Control of the Translation Kinematics of a Quadrotor Aerial Vehicle , year=. doi:10.1109/TRO.2008.2011419 , ISSN=
-
[28]
Current Biology , volume=
Optic flow cues guide flight in birds , author=. Current Biology , volume=. 2011 , publisher=
2011
-
[29]
Sylvain Bertrand and Nicolas Gu\'. A hierarchical controller for miniature \ VTOL\ UAVs: Design and stability analysis using singular perturbation theory , journal =. 2011 , issn =. doi:http://dx.doi.org/10.1016/j.conengprac.2011.05.008 , url =
-
[30]
IEEE Transactions on Automatic Control , volume=
Cooperative control design for time-varying formations of multi-agent systems , author=. IEEE Transactions on Automatic Control , volume=. 2014 , publisher=
2014
-
[31]
Science Robotics , volume=
Implicit coordination for 3D underwater collective behaviors in a fish-inspired robot swarm , author=. Science Robotics , volume=. 2021 , publisher=
2021
-
[32]
IEEE Transactions on Automatic Control , volume=
Nonlinear opinion dynamics with tunable sensitivity , author=. IEEE Transactions on Automatic Control , volume=. 2022 , publisher=
2022
-
[33]
Campbell, R. D. , title =. 1994 , isbn =
1994
-
[34]
Corke, P.I. and Good, M.C. , journal=. Dynamic effects in visual closed-loop systems , year=. doi:10.1109/70.538973 , ISSN=
-
[35]
James V. Carroll. Vulnerability Assessment of the U.S. Transportation Infrastructure that Relies on the Global Positioning System. Journal of Navigation. 2003. doi:10.1017/S0373463303002273
-
[36]
Chaumette, F. and Hutchinson, S. , journal=. Visual servo control. I. Basic approaches , year=. doi:10.1109/MRA.2006.250573 , ISSN=
-
[37]
Chaumette, F. and Hutchinson, S. , journal=. Visual servo control. II. Advanced approaches [Tutorial] , year=. doi:10.1109/MRA.2007.339609 , ISSN=
-
[38]
2008 47th IEEE Conference on Decision and Control , pages=
Control of acyclic formations of mobile autonomous agents , author=. 2008 47th IEEE Conference on Decision and Control , pages=. 2008 , organization=
2008
-
[39]
Proceedings of the 32nd Chinese Control Conference , pages=
Consensus-based cooperative source localization of multi-agent systems , author=. Proceedings of the 32nd Chinese Control Conference , pages=. 2013 , organization=
2013
-
[40]
Journal of Intelligent & Robotic Systems , volume=
Path planning for multi-UAV formation , author=. Journal of Intelligent & Robotic Systems , volume=. 2015 , publisher=
2015
-
[41]
Nonlinear Analysis: Real World Applications , volume=
Sharp conditions to avoid collisions in singular Cucker--Smale interactions , author=. Nonlinear Analysis: Real World Applications , volume=. 2017 , publisher=
2017
-
[42]
2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , pages=
Proactive opinion-driven robot navigation around human movers , author=. 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , pages=. 2023 , organization=
2023
-
[43]
European Journal of Control , volume=
Safe platooning and merging control using constructive barrier feedback , author=. European Journal of Control , volume=. 2024 , publisher=
2024
-
[44]
Automatica , volume=
A feedback stabilization and collision avoidance scheme for multiple independent non-point agents , author=. Automatica , volume=. 2006 , publisher=
2006
-
[45]
Journal of guidance, control, and dynamics , volume=
Vision-based tracking and motion estimation for moving targets using unmanned air vehicles , author=. Journal of guidance, control, and dynamics , volume=
-
[46]
Systems & Control Letters , volume=
A continuous time linear adaptive source localization algorithm, robust to persistent drift , author=. Systems & Control Letters , volume=. 2009 , publisher=
2009
-
[47]
IEEE Transactions on Automatic Control , volume=
Localization and circumnavigation of a slowly moving target using bearing measurements , author=. IEEE Transactions on Automatic Control , volume=. 2014 , publisher=
2014
-
[48]
IEEE Transactions on Control Systems Technology , volume=
Time-varying formation control for unmanned aerial vehicles: Theories and applications , author=. IEEE Transactions on Control Systems Technology , volume=. 2015 , publisher=
2015
-
[49]
IEEE Transactions on Automatic Control , volume=
Time-varying formation tracking for linear multiagent systems with multiple leaders , author=. IEEE Transactions on Automatic Control , volume=. 2017 , publisher=
2017
-
[50]
Automatica , volume=
Target localization and enclosing control for networked mobile agents with bearing measurements , author=. Automatica , volume=. 2020 , publisher=
2020
-
[51]
42nd IEEE International Conference on Decision and Control , volume=
Sensor and network topologies of formations with direction, bearing, and angle information between agents , author=. 42nd IEEE International Conference on Decision and Control , volume=. 2003 , organization=
2003
-
[52]
Turkish Journal of Electrical Engineering & Computer Sciences , volume=
Using angle of arrival (bearing) information for localization in robot networks , author=. Turkish Journal of Electrical Engineering & Computer Sciences , volume=. 2007 , publisher=
2007
-
[53]
International Journal of Control , volume=
Formation shape control based on bearing rigidity , author=. International Journal of Control , volume=. 2012 , publisher=
2012
-
[54]
and Dzul, A
Espinoza, T. and Dzul, A. and Garcia, L. and Parada, R. , booktitle=. Nonlinear Controllers Applied to Fixed-Wing UAV , year=
-
[55]
National Aeronautics and Space Administration , year=
NASA Aviation Safety Program Conference on Human Performance Modeling of Approach and Landing with Augmented Displays , author=. National Aeronautics and Space Administration , year=
-
[56]
Nature , volume=
Science, technology and the future of small autonomous drones , author=. Nature , volume=. 2015 , publisher=
2015
-
[57]
Guenard, N. and Hamel, T. and Mahony, R. , journal=. A Practical Visual Servo Control for an Unmanned Aerial Vehicle , year=. doi:10.1109/TRO.2008.916666 , ISSN=
-
[58]
and Hamel, T
Guenardt, N. and Hamel, T. and Moreau V. , title =. 2005 International Conference on Control and Automation (ICCA2005) , pages =. 2005 , address =
2005
-
[59]
IEEE signal processing magazine , volume=
Localization via ultra-wideband radios: a look at positioning aspects for future sensor networks , author=. IEEE signal processing magazine , volume=. 2005 , publisher=
2005
-
[60]
, booktitle=
Ghanadan, R. , booktitle=. Nonlinear control system design via dynamic order reduction , year=
-
[61]
Gangloff, J.A. and de Mathelin, M.F. , journal=. Visual servoing of a 6-DOF manipulator for unknown 3-d profile following , year=. doi:10.1109/TRA.2002.802201 , ISSN=
-
[62]
IFAC-PapersOnLine , volume=
New pose estimation scheme in perspective vision system during civil aircraft landing , author=. IFAC-PapersOnLine , volume=. 2015 , publisher=
2015
-
[63]
Robotics and Automation (ICRA), 2010 IEEE International Conference on , pages=
Homography-based visual servoing of an aircraft for automatic approach and landing , author=. Robotics and Automation (ICRA), 2010 IEEE International Conference on , pages=. 2010 , organization=
2010
-
[64]
IEEE Access , volume=
Obstacle detection and collision avoidance for a UAV with complementary low-cost sensors , author=. IEEE Access , volume=. 2015 , publisher=
2015
-
[65]
IEEE Transactions on Control of Network Systems , volume=
Multiagent decision-making dynamics inspired by honeybees , author=. IEEE Transactions on Control of Network Systems , volume=. 2018 , publisher=
2018
-
[66]
IEEE Transactions on Automatic Control , volume=
On passivity, reinforcement learning, and higher order learning in multiagent finite games , author=. IEEE Transactions on Automatic Control , volume=. 2020 , publisher=
2020
-
[67]
Hutchinson, S. and Hager, G.D. and Corke, P.I. , journal=. A tutorial on visual servo control , year=. doi:10.1109/70.538972 , ISSN=
-
[68]
Hamel, T. and Mahony, R. , journal=. Visual servoing of an under-actuated dynamic rigid-body system: an image-based approach , year=. doi:10.1109/TRA.2002.999647 , ISSN=
-
[69]
AIAA conference on guidance, navigation and control , year=
Pitch-altitude control and terrain following based on bio-inspired visuomotor convergence , author=. AIAA conference on guidance, navigation and control , year=
-
[70]
International Journal of Robust and Nonlinear Control: IFAC-Affiliated Journal , volume=
Directed graphs for the analysis of rigidity and persistence in autonomous agent systems , author=. International Journal of Robust and Nonlinear Control: IFAC-Affiliated Journal , volume=. 2007 , publisher=
2007
-
[71]
Hoffmann and Haomiao Huang and Steven L
Gabriel M. Hoffmann and Haomiao Huang and Steven L. Wasl and Er Claire J. Tomlin , title =. In Proc. of the AIAA Guidance, Navigation, and Control Conference , year =
-
[72]
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , year=
Hovering flight and vertical landing control of a VTOL Unmanned Aerial Vehicle using optical flow , author=. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , year=
-
[73]
IEEE Transactions on Robotics , title=
H\'. IEEE Transactions on Robotics , title=. 2012 , month=. doi:10.1109/TRO.2011.2163435 , ISSN=
-
[74]
49th IEEE Conference on Decision and Control (CDC) , pages=
Obstacle avoidance for teleoperated underactuated aerial vehicles using telemetric measurements , author=. 49th IEEE Conference on Decision and Control (CDC) , pages=. 2010 , organization=
2010
-
[75]
and Yuji Igarashi and Fujita, M
Hatanaka, T. and Yuji Igarashi and Fujita, M. and Spong, M.W. , journal=. Passivity-Based Pose Synchronization in Three Dimensions , year=. doi:10.1109/TAC.2011.2166668 , ISSN=
-
[76]
Honegger, D. and Meier, L. and Tanskanen, P. and Pollefeys, M. , booktitle=. An open source and open hardware embedded metric optical flow CMOS camera for indoor and outdoor applications , year=. doi:10.1109/ICRA.2013.6630805 , ISSN=
-
[77]
Automatica , volume=
Position estimation from direction or range measurements , author=. Automatica , volume=. 2017 , publisher=
2017
-
[78]
IEEE Transactions on Automatic Control , volume=
Integrated relative localization and leader--follower formation control , author=. IEEE Transactions on Automatic Control , volume=. 2018 , publisher=
2018
-
[79]
and Marconi, L
Isidori, A. and Marconi, L. and Serrani, A. , title =. 2003 , isbn =
2003
-
[80]
Advanced Intelligent Mechatronics (AIM), 2015 IEEE International Conference on , pages=
Vision-based control of a flying robot without linear velocity measurements , author=. Advanced Intelligent Mechatronics (AIM), 2015 IEEE International Conference on , pages=. 2015 , organization=
2015
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.