Distributed Consensus for Multiple Lagrangian Systems with Parametric Uncertainties and External Disturbances Under Directed Graphs
Pith reviewed 2026-05-24 16:23 UTC · model grok-4.3
The pith
Lagrangian systems achieve weighted average consensus under directed graphs with an explicit equilibrium formula.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
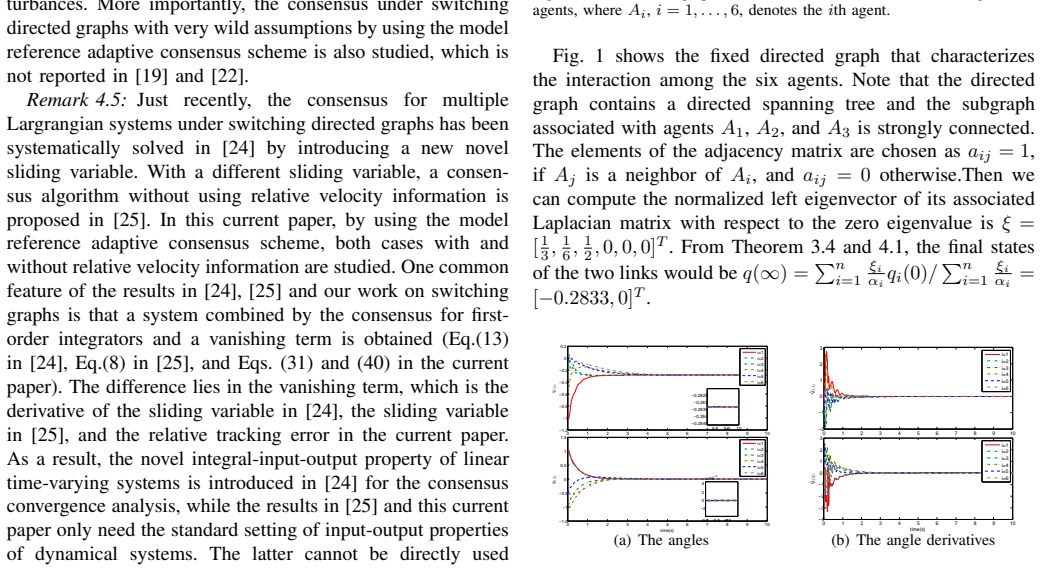
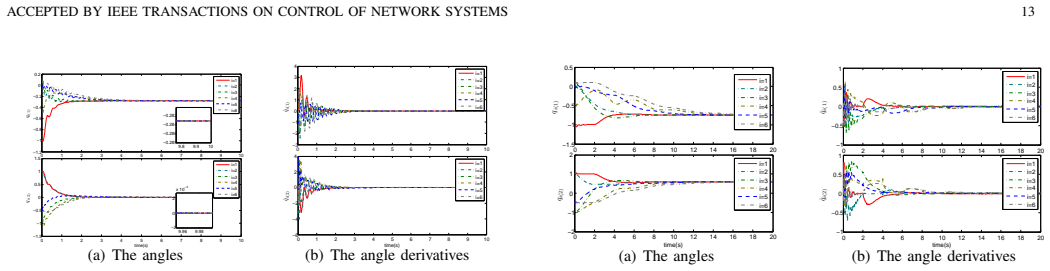
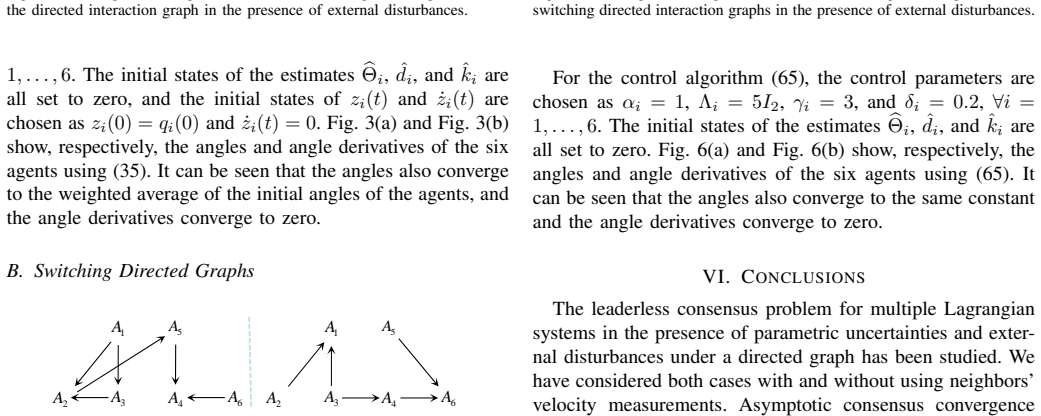
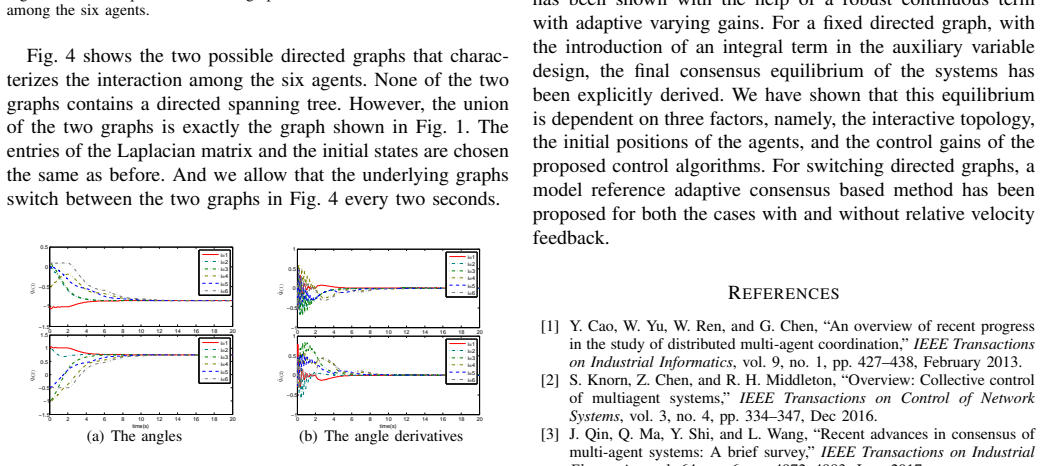
By introducing an integrate term in the auxiliary variable design, the final consensus equilibrium can be explicitly derived for the case of a fixed directed graph. The agents achieve weighted average consensus, where the final equilibrium depends on the interactive topology, the initial positions of the agents, and the control gains of the proposed control algorithm. For switching directed graphs, a model reference adaptive consensus based algorithm ensures leaderless consensus provided the infinite sequence of switching graphs is uniformly jointly connected. Similar algorithms without using neighbors' velocity information are also proposed.
What carries the argument
The auxiliary variable with an added integrate term that enables explicit equilibrium derivation, combined with robust continuous terms with adaptive varying gains to handle disturbances.
If this is right
- Agents reach asymptotic consensus without knowledge of disturbance bounds.
- The equilibrium position is a weighted average determined by graph, initials, and gains.
- Consensus holds for switching graphs under uniform joint connectivity.
- Algorithms work using only local neighbor information without common control gains.
- Versions exist that avoid needing neighbor velocity data.
Where Pith is reading between the lines
- If the graph connectivity condition is met only marginally, the convergence rate may slow significantly.
- The approach could extend to other Euler-Lagrange systems like manipulators in formation control tasks.
- Testing on physical robot platforms would verify robustness to real-world disturbances beyond simulations.
Load-bearing premise
The communication graph is either fixed and directed or the sequence of switching graphs is uniformly jointly connected.
What would settle it
A simulation or experiment where the graph is not connected and the agents fail to reach a common position, or where the observed equilibrium deviates from the predicted weighted average based on initials and gains.
Figures
read the original abstract
In this paper, we study the leaderless consensus problem for multiple Lagrangian systems in the presence of parametric uncertainties and external disturbances under directed graphs. For achieving asymptotic behavior, a robust continuous term with adaptive varying gains is added to alleviate the effects of the external disturbances with unknown bounds. In the case of a fixed directed graph, by introducing an integrate term in the auxiliary variable design, the final consensus equilibrium can be explicitly derived. We show that the agents achieve weighted average consensus, where the final equilibrium is dependent on three factors, namely, the interactive topology, the initial positions of the agents, and the control gains of the proposed control algorithm. In the case of switching directed graphs, a model reference adaptive consensus based algorithm is proposed such that the agents achieve leaderless consensus if the infinite sequence of switching graphs is uniformly jointly connected. Motivated by the fact that the relative velocity information is difficult to obtain accurately, we further propose a leaderless consensus algorithm with gain adaptation for multiple Lagrangian systems without using neighbors' velocity information. We also propose a model reference adaptive consensus based algorithm without using neighbors' velocity information for switching directed graphs. The proposed algorithms are distributed in the sense of using local information from its neighbors and using no comment control gains. Numerical simulations are performed to show the effectiveness of the proposed algorithms.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper studies leaderless consensus for multiple Lagrangian systems with parametric uncertainties and bounded external disturbances under directed graphs. For fixed graphs, an integral term is introduced in the auxiliary variable to explicitly derive a weighted-average consensus equilibrium that depends on the graph topology, agents' initial positions, and the local control gains. Robust adaptive terms with varying gains handle disturbances of unknown magnitude. For switching graphs, a model-reference adaptive algorithm is proposed under the assumption of uniform joint connectivity. Velocity-free variants are also developed for both fixed and switching cases. Effectiveness is illustrated via numerical simulations.
Significance. The explicit recovery of the consensus equilibrium via the integral augmentation for fixed directed graphs is a useful clarification, as the dependence on local gains is a direct and often under-emphasized consequence of such designs. The velocity-free extensions and the adaptive handling of unknown disturbance bounds address practical implementation issues common in Lagrangian multi-agent systems. If the Lyapunov arguments and equilibrium derivations are correct, the work strengthens the literature on robust distributed consensus under directed topologies.
minor comments (2)
- Abstract, line ~10: 'no comment control gains' appears to be a typographical error for 'no common control gains'.
- The abstract states the main results but provides no indication of the specific Lyapunov functions or gain-adaptation laws; the full manuscript should make these explicit in the theorems and proofs.
Simulated Author's Rebuttal
We thank the referee for the positive assessment of our manuscript and the recommendation of minor revision. The referee's summary correctly reflects the paper's contributions on leaderless consensus protocols for uncertain Lagrangian systems under directed graphs, including the explicit weighted-average equilibrium derivation, adaptive disturbance rejection, and velocity-free variants. No major comments were raised in the report.
Circularity Check
Derivation is self-contained with no circularity
full rationale
The paper derives consensus protocols for Lagrangian systems via standard Lyapunov stability analysis, adaptive terms for uncertainties, and an auxiliary integral for explicit equilibrium recovery under fixed directed graphs. These steps follow directly from the proposed control laws and conventional graph connectivity assumptions (spanning tree for fixed case, uniform joint connectivity for switching). No load-bearing self-citations, self-definitional reductions, fitted inputs renamed as predictions, or smuggled ansatzes are present; the weighted-average equilibrium dependence on topology, initials, and gains is an explicit outcome of the integral augmentation rather than a circular fit. The analysis is self-contained against external benchmarks in the multi-agent control literature.
Axiom & Free-Parameter Ledger
free parameters (1)
- control gains
axioms (1)
- domain assumption The communication graph is directed; for switching case the infinite sequence is uniformly jointly connected.
Reference graph
Works this paper leans on
-
[1]
An overview of recent progress in the study of distributed multi-agent coordination,
Y . Cao, W. Yu, W. Ren, and G. Chen, “An overview of recent progress in the study of distributed multi-agent coordination,” IEEE Transactions on Industrial Informatics , vol. 9, no. 1, pp. 427–438, February 2013
work page 2013
-
[2]
Overview: Collective control of multiagent systems,
S. Knorn, Z. Chen, and R. H. Middleton, “Overview: Collective control of multiagent systems,” IEEE Transactions on Control of Network Systems, vol. 3, no. 4, pp. 334–347, Dec 2016
work page 2016
-
[3]
Recent advances in consensus of multi-agent systems: A brief survey,
J. Qin, Q. Ma, Y . Shi, and L. Wang, “Recent advances in consensus of multi-agent systems: A brief survey,” IEEE Transactions on Industrial Electronics, vol. 64, no. 6, pp. 4972–4983, June 2017
work page 2017
-
[4]
A survey of multi-agent formation control,
K.-K. Oh, M.-C. Park, and H.-S. Ahn, “A survey of multi-agent formation control,” Automatica, vol. 53, no. 3, pp. 424–440, March 2015
work page 2015
-
[5]
Network topology and communication-computation tradeoffs in decentralized optimization,
A. Nedi ´c, A. Olshevsky, and M. G. Rabbat, “Network topology and communication-computation tradeoffs in decentralized optimization,” Proceedings of the IEEE , vol. 106, no. 5, pp. 953–976, May 2018
work page 2018
-
[6]
L. Scardovi, M. Arcak, and E. Sontag, “Synchronization of intercon- nected systems with applications to biochemical networks: An input- output approach,” IEEE Transactions on Automatic Control , vol. 55, no. 6, pp. 1367 –1379, June 2010
work page 2010
-
[7]
W. Chen, C. Wen, S. Hua, and C. Sun, “Distributed cooperative adap- tive identification and control for a group of continuous-time systems with a cooperative pe condition via consensus,” IEEE Transactions on Automatic Control, vol. 59, no. 1, pp. 91–106, January 2014. 14 ACCEPTED BY IEEE TRANSACTIONS ON CONTROL OF NETWORK SYSTEMS
work page 2014
-
[8]
Information consensus in multivehicle cooperative control,
W. Ren, R. W. Beard, and E. M. Atkins, “Information consensus in multivehicle cooperative control,” IEEE Control Systems Magazine , vol. 27, no. 2, pp. 71–82, April 2007
work page 2007
-
[9]
J. Mei, W. Ren, and J. Chen, “Distributed consensus of second-order multi-agent systems with heterogeneous unknown inertias and control gains under a directed graph,” IEEE Transactions on Automatic Control, vol. 61, no. 8, pp. 2019–2034, August 2016
work page 2019
-
[10]
K. Liu, Z. Ji, and W. Ren, “Necessary and sufficient conditions for consensus of second-order multiagent systems under directed topologies without global gain dependency,” IEEE Transactions on Cybernetics , vol. 47, no. 8, pp. 2089–2098, 2017
work page 2089
-
[11]
Synchronization in networks of identical linear systems,
L. Scardovi and R. Sepulchre, “Synchronization in networks of identical linear systems,” Automatica, vol. 45, no. 11, pp. 2557–2562, Novermeber 2009
work page 2009
-
[12]
Consensus of multi-agent systems and synchronization of complex networks: A unified viewpoint,
Z. Li, Z. Duan, G. Chen, and L. Huang, “Consensus of multi-agent systems and synchronization of complex networks: A unified viewpoint,” IEEE Transactions on Circutis and Systems-1: Regular papers , vol. 57, no. 1, pp. 213–224, January 2010
work page 2010
-
[13]
Z. Hou, L. Cheng, and M. Tan, “Decentralized robust adaptive control for the multiagent system consensus problem using neural networks,” IEEE Transactions on Systems, Man, and Cybernetics-Part B: Cyber- netics, vol. 39, no. 3, pp. 636–647, 2009
work page 2009
- [14]
-
[15]
Decentralized adaptive consensus control for multi-manipulator system with uncertain dynamics,
L. Cheng, Z. Hou, and M. Tan, “Decentralized adaptive consensus control for multi-manipulator system with uncertain dynamics,” in Proceedings of IEEE International Conference on Systems, Man, and Cybernetics, Singapore, 2008, pp. 2712–2717
work page 2008
-
[16]
Distributed leaderless consensus algorithms for networked Euler-Lagrange systems,
W. Ren, “Distributed leaderless consensus algorithms for networked Euler-Lagrange systems,” International Journal of Control , vol. 82, no. 11, pp. 2137–2149, 2009
work page 2009
-
[17]
E. Nuno, R. Ortega, L. Basanez, and D. Hill, “Synchronization of net- works of nonidentical Euler-Lagrange systems with uncertain parameters and communication delays,” IEEE Transactions on Automatic Control , vol. 56, no. 4, pp. 935–941, April 2011
work page 2011
-
[18]
J. Mei, W. Ren, and G. Ma, “Distributed containment control for Lagrangian networks with parametric uncertainties under a directed graph,” Automatica, vol. 48, no. 4, pp. 653–659, April 2012
work page 2012
-
[19]
J. Mei, W. Ren, J. Chen, and G. Ma, “Distributed adaptive coordination for multiple Lagrangian systems under a directed graph without using neighbors’ velocity information,” Automatica, vol. 49, no. 6, pp. 1723– 1731, 2013
work page 2013
-
[20]
Consensus of networked Euler-Lagrange systems under time-varying sampled-data control,
W. Zhang, Y . Tang, T. Huang, and A. V . Vasilakos, “Consensus of networked Euler-Lagrange systems under time-varying sampled-data control,” IEEE Transactions on Industrial Informatics , vol. 14, no. 2, pp. 535–544, Feb 2018
work page 2018
-
[21]
Adaptive consensus control for multiple Euler- Lagrange systems with external disturbance,
Y . Liu and Y . Jia, “Adaptive consensus control for multiple Euler- Lagrange systems with external disturbance,” International Journal of Control, Automation and Systems , vol. 15, no. 1, pp. 205– 211, 2017
work page 2017
-
[22]
Consensus of networked mechanical systems with communi- cation delays: A unified framework,
H. Wang, “Consensus of networked mechanical systems with communi- cation delays: A unified framework,” IEEE Transactions on Automatic Control, vol. 59, no. 6, pp. 1571–1576, 2014
work page 2014
-
[23]
Flocking of networked uncertain Euler-Lagrange systems on directed graphs,
——, “Flocking of networked uncertain Euler-Lagrange systems on directed graphs,” Automatica, vol. 49, no. 9, pp. 2774–2779, 2013
work page 2013
-
[24]
Dynamic feedback for consensus of networked Lagrangian systems with switching topology,
——, “Dynamic feedback for consensus of networked Lagrangian systems with switching topology,” in2017 Chinese Automation Congress (CAC), Oct 2017, pp. 1340–1345
work page 2017
-
[25]
Distributed consensus of euler-lagrange systems under switching directed graphs,
A. Abdessameud, “Distributed consensus of euler-lagrange systems under switching directed graphs,” in 2018 Annual American Control Conference (ACC), June 2018, pp. 56–61
work page 2018
-
[26]
Distributed model-independent consensus of Euler-Lagrange agents on directed networks,
M. Ye, B. D. Anderson, and C. Yu, “Distributed model-independent consensus of Euler-Lagrange agents on directed networks,” International Journal of Robust and Nonlinear Control , vol. 27, no. 14, pp. 2428– 2450
-
[27]
Weighted consensus for multiple Lagrangian systems under a directed graph,
J. Mei, “Weighted consensus for multiple Lagrangian systems under a directed graph,” in 2015 Chinese Automation Congress (CAC) , 2015, pp. 1064–1068
work page 2015
-
[28]
——, “Weighted consensus for multiple Lagrangian systems under a directed graph without using neighbors velocity measurements,” in Proceedings of the American Control Conference , Seattle, USA, May 24–May 26 2017, pp. 1353–1357
work page 2017
-
[29]
Semiautonomous control of multiple networked Lagrangian systems,
P. F. Hokayem, D. M. Stipanovic, and M. W. Spong, “Semiautonomous control of multiple networked Lagrangian systems,” International Jour- nal of Robust and Nonlinear Control , vol. 19, no. 18, pp. 2040–2055, 2009
work page 2040
-
[30]
Cooperative robot control and con- current synchronization of Lagrangian systems,
S.-J. Chung and J.-J. E. Slotine, “Cooperative robot control and con- current synchronization of Lagrangian systems,” IEEE Transactions on Robotics, vol. 25, no. 3, pp. 686–700, June 2009
work page 2009
-
[31]
Z. Meng, D. V . Dimarogonas, and K. H. Johansson, “Leader-follower coordinated tracking of multiple heterogeneous Lagrange systems using continuous control,” IEEE Transactions on Robotics , vol. 30, no. 3, pp. 739–745, June 2014
work page 2014
-
[32]
H. Cai and J. Huang, “The leader-following consensus for multiple uncertain Euler-Lagrange systems with an adaptive distributed observer,” IEEE Transactions on Automatic Control , vol. 61, no. 10, pp. 3152– 3157, Oct 2016
work page 2016
-
[33]
A. Abdessameud, A. Tayebi, and I. G. Polushin, “Leader-follower synchronization of Euler-Lagrange systems with time-varying leader trajectory and constrained discrete-time communication,” IEEE Trans- actions on Automatic Control, vol. 62, no. 5, pp. 2539–2545, May 2017
work page 2017
-
[34]
Distributed global output-feedback control for a class of Euler-Lagrange systems,
Q. Yang, H. Fang, J. Chen, Z. P. Jiang, and M. Cao, “Distributed global output-feedback control for a class of Euler-Lagrange systems,” IEEE Transactions on Automatic Control, vol. 62, no. 9, pp. 4855–4861, Sept 2017
work page 2017
-
[35]
Distributed tracking control of uncertain mechanical systems with velocity constraints,
C. Chen and W. Dong, “Distributed tracking control of uncertain mechanical systems with velocity constraints,” International Journal of Robust and Nonlinear Control , vol. 27, no. 17, pp. 3990–4012
-
[36]
Event-triggered algorithms for leader-follower consensus of networked Euler-Lagrange agents,
Q. Liu, M. Ye, J. Qin, and C. Yu, “Event-triggered algorithms for leader-follower consensus of networked Euler-Lagrange agents,” IEEE Transactions on Systems, Man, and Cybernetics: Systems , pp. 1–13, 2017
work page 2017
-
[37]
Distributed coordina- tion of multiple unknown Euler-Lagrange systems,
Z. Feng, G. Hu, W. Ren, W. E. Dixon, and J. Mei, “Distributed coordina- tion of multiple unknown Euler-Lagrange systems,” IEEE Transactions on Control of Network Systems , vol. 5, no. 1, pp. 55–66, March 2018
work page 2018
-
[38]
G. Chen, Y . Song, and Y . Guan, “Terminal sliding mode-based consensus tracking control for networked uncertain mechanical systems on di- graphs,” IEEE Transactions on Neural Networks and Learning Systems , vol. 29, no. 3, pp. 749–756, March 2018
work page 2018
-
[39]
J. R. Klotz, S. Obuz, Z. Kan, and W. E. Dixon, “Synchronization of uncertain Euler-Lagrange systems with uncertain time-varying commu- nication delays,” IEEE Transactions on Cybernetics , vol. 48, no. 2, pp. 807–817, Feb 2018
work page 2018
-
[40]
On synchronization and collision avoidance for mechanical systems,
N. Chopra, D. M. Stipanovic, and M. W. Spong, “On synchronization and collision avoidance for mechanical systems,” in Proceedings of the American Control Conference , Seattle, Washington, June 2008, pp. 3713–3718
work page 2008
-
[41]
Fully distributed flocking with a moving leader for Lagrange networks with parametric uncertainties,
S. Ghapani, J. Mei, W. Ren, and Y . Song, “Fully distributed flocking with a moving leader for Lagrange networks with parametric uncertainties,” Automatica, vol. 67, pp. 67 – 76, 2016
work page 2016
-
[42]
Distributed finite-time attitude contain- ment control for multiple rigid bodies,
Z. Meng, W. Ren, and Z. You, “Distributed finite-time attitude contain- ment control for multiple rigid bodies,” Automatica, vol. 46, no. 12, pp. 2092–2099, December 2010
work page 2092
-
[43]
J.-J. E. Slotine and W. Li, Applied Nonlinear Control . Englewood Cliffs, New Jersey: Prentice Hall, 1991
work page 1991
- [44]
-
[45]
A. Berman and R. J. Plemmons, Nonnegative Matrices in the Mathe- matical Sciences. New York: Academic Press, INC., 1979
work page 1979
-
[46]
Low-frequency learning and fast adaptation in model reference adaptive control,
T. Yucelen and W. Haddad, “Low-frequency learning and fast adaptation in model reference adaptive control,” IEEE Transactions on Automatic Control, vol. 58, no. 4, pp. 1080–1085, 2013
work page 2013
-
[47]
Model reference adaptive consensus for uncertain multi-agent systems under directed graphs,
J. Mei, “Model reference adaptive consensus for uncertain multi-agent systems under directed graphs,” in Proceedings of the IEEE Conference on Decision and Control , FL, USA, 2018, pp. 6198–6203
work page 2018
-
[48]
W. J. Rugh, Linear System Theory , 2nd ed. Englewood Cliffs, New Jersey: Prentice Hall, 1996. ACCEPTED BY IEEE TRANSACTIONS ON CONTROL OF NETWORK SYSTEMS 15 Jie Mei (M’14) received the B.S. degree in Informa- tion and Computing Science from Jilin University, Changchun, China, in 2007, and the Ph.D. degree in Control Science and Engineering from the Harbin...
work page 1996
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.