Rate-Aware Quantum-Inspired Trajectory Learning for Interference-Limited Multi-UAV Networks
Pith reviewed 2026-06-25 19:53 UTC · model grok-4.3
The pith
The RA-QAGC scheme raises total throughput to 59.4 Mbps and priority-user throughput to 23.9 Mbps in interference-limited multi-UAV networks by combining rate-aware graph abstraction with decentralized reinforcement learning.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
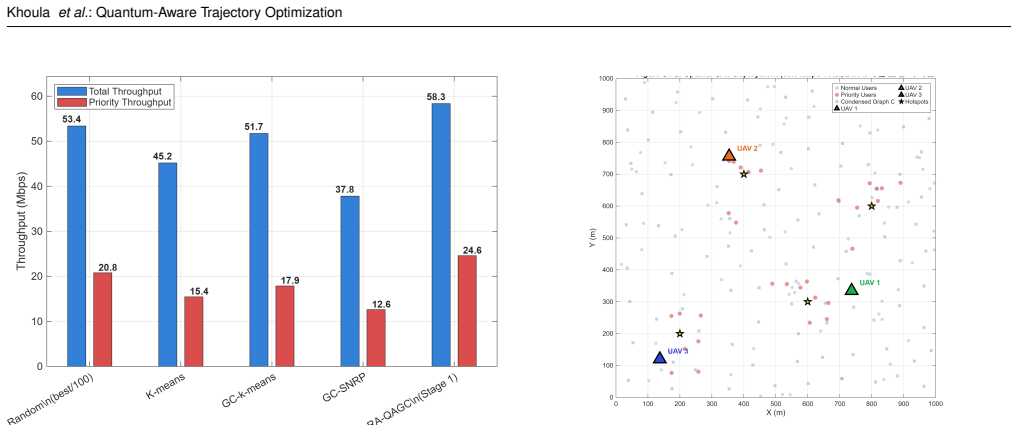
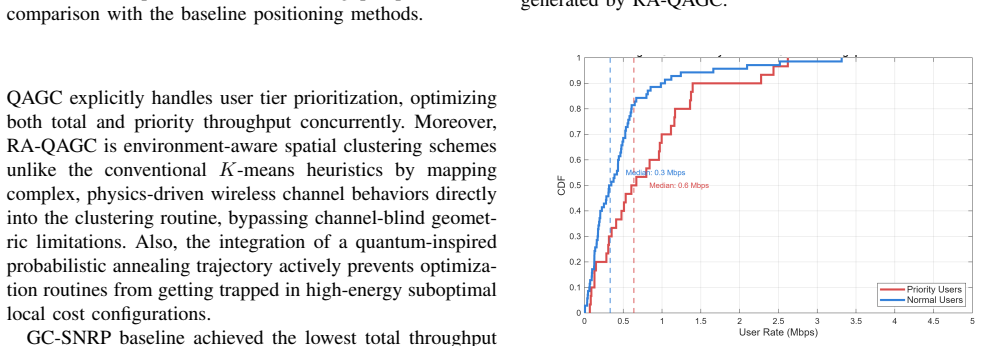
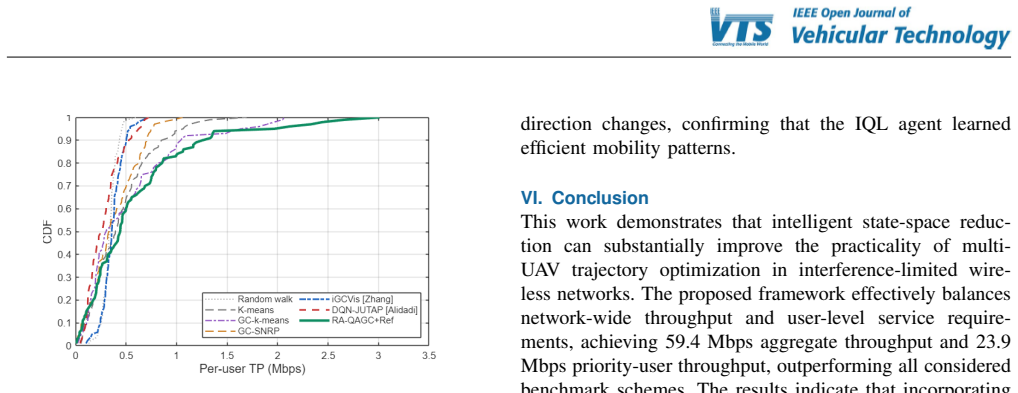
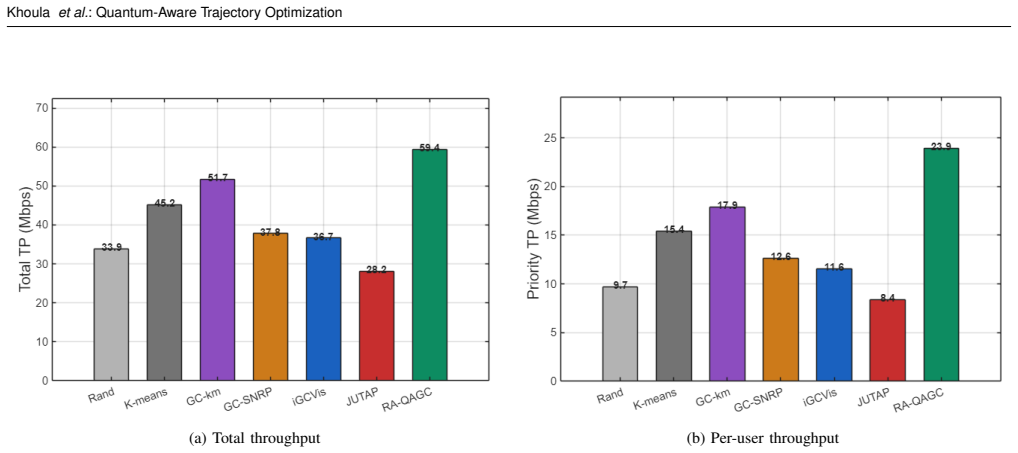
The Rate-Aware Quantum-Annealed Graph Condensation (RA-QAGC) scheme identifies high-throughput locations through rate-aware graph abstraction and guides UAV trajectories toward those regions using decentralized reinforcement learning; this balances overall network capacity while preserving quality-of-service requirements, producing simulation results of 59.4 Mbps total throughput and 23.9 Mbps priority-user throughput that exceed baseline schemes by roughly 15 percent and 34 percent.
What carries the argument
Rate-Aware Quantum-Annealed Graph Condensation (RA-QAGC), which condenses the interference-limited state into a rate-aware graph and applies decentralized reinforcement learning to adapt trajectories toward throughput-optimal regions.
If this is right
- UAV fleets can coordinate trajectories in real time despite large search spaces created by interference.
- Network capacity becomes balanced while priority users continue to receive elevated quality of service.
- Throughput gains of approximately 15 percent overall and 34 percent for priority users are attainable over existing methods.
- Decentralized learning removes the need for a single central optimizer in multi-UAV coordination.
Where Pith is reading between the lines
- The same condensation step could reduce computation when planning paths for other fleets of mobile transmitters such as ground vehicles.
- Decentralized updates may allow the method to tolerate partial loss of communication links between UAVs.
- Testing the scheme with time-varying user locations would reveal whether the graph abstraction must be recomputed at higher frequency.
Load-bearing premise
The simulation environment and interference model used to generate the reported throughput numbers accurately capture the dynamics and constraints of real-world multi-UAV deployments.
What would settle it
Running the RA-QAGC algorithm on physical UAV hardware in a real interference-limited setting and checking whether measured throughputs reach or exceed the simulated values of 59.4 Mbps total and 23.9 Mbps for priority users.
Figures
read the original abstract
Unmanned aerial vehicle (UAV) can provide on-demand, high-capacity connectivity in disaster and normal situation. However, it faces a challenge of curse of dimensionality in trajectory optimization, where interference-limited environments and vast search spaces make real-time coordination computationally expensive. To overcome this challenge, we propose the Rate-Aware Quantum-Annealed Graph Condensation (RA-QAGC) scheme, which combines rate-aware graph abstraction with decentralized reinforcement learning to enable scalable, interference-aware UAV coordination. By identifying high throughput locations and guiding UAV trajectory adaptation toward throughput-optimal regions, RA-QAGC effectively balances network capacity by maintaining quality-of-service (QoS) requirements. Simulation results demonstrate the proposal outperformed over existing schemes by achieving 59.4 Mbps total throughput and 23.9 Mbps priority-user throughput, representing gains of approximately 15% and 34%, respectively, over the baseline schemes.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes the Rate-Aware Quantum-Annealed Graph Condensation (RA-QAGC) scheme, which integrates rate-aware graph abstraction with decentralized reinforcement learning for scalable trajectory optimization in interference-limited multi-UAV networks. The approach aims to address the curse of dimensionality by identifying high-throughput locations and guiding UAV trajectories accordingly while maintaining QoS. The central claim is that simulations show RA-QAGC achieving 59.4 Mbps total throughput and 23.9 Mbps for priority users, representing approximately 15% and 34% improvements over baseline schemes.
Significance. Should the simulation-based performance claims prove reproducible and the underlying interference model hold under real-world conditions, this work could contribute to practical methods for real-time UAV coordination in dense networks. It combines quantum annealing concepts with graph condensation and RL, potentially offering efficiency gains in high-dimensional optimization problems common in wireless networks. However, without detailed methods, its significance relative to prior art in quantum-inspired optimization or multi-agent RL for UAVs cannot be fully evaluated.
major comments (1)
- [Abstract] The abstract reports specific numerical results (59.4 Mbps total throughput, 23.9 Mbps priority-user throughput, 15% and 34% gains) from simulations but provides no details on the simulation environment, including number of UAVs, deployment area, path-loss model, transmit powers, bandwidth, noise parameters, or how the quantum annealing is approximated classically. It also lacks algorithm pseudocode, baseline descriptions, or error bars. This absence renders the central performance claim unverifiable and prevents assessment of whether the gains are robust or sensitive to modeling assumptions.
minor comments (1)
- [Abstract] The phrasing 'the proposal outperformed over existing schemes' is grammatically awkward and should be revised for clarity (e.g., 'outperformed existing schemes').
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on the abstract. We address the single major comment below.
read point-by-point responses
-
Referee: [Abstract] The abstract reports specific numerical results (59.4 Mbps total throughput, 23.9 Mbps priority-user throughput, 15% and 34% gains) from simulations but provides no details on the simulation environment, including number of UAVs, deployment area, path-loss model, transmit powers, bandwidth, noise parameters, or how the quantum annealing is approximated classically. It also lacks algorithm pseudocode, baseline descriptions, or error bars. This absence renders the central performance claim unverifiable and prevents assessment of whether the gains are robust or sensitive to modeling assumptions.
Authors: We acknowledge the referee's point that the abstract, in its current form, is concise and does not embed the full simulation parameters. The manuscript body (Sections III and IV) provides these details: 10 UAVs deployed over a 500 m × 500 m area, 3GPP urban path-loss model with 20 dBm transmit power, 20 MHz bandwidth, -174 dBm/Hz noise density, and classical approximation of quantum annealing via simulated annealing (detailed in Section II-C with pseudocode in Algorithm 1). Baselines are defined in Section IV-B, and all throughput results include standard deviation error bars over 100 Monte Carlo trials. We will revise the abstract to add one sentence summarizing the key setup parameters and explicitly state that full methods appear in the body. This addresses verifiability while respecting abstract length limits. revision: yes
Circularity Check
No circularity: simulation results are independent empirical claims
full rationale
The paper presents RA-QAGC as a proposed scheme combining rate-aware graph abstraction with decentralized RL for UAV coordination. The central performance numbers (59.4 Mbps total throughput, 23.9 Mbps priority throughput, 15%/34% gains) are reported directly as simulation outputs. No derivation chain, equations, fitted parameters renamed as predictions, or self-citations are visible in the provided text that would reduce these results to inputs by construction. The claims remain self-contained empirical validation without load-bearing circular steps.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Emerging trends in UA Vs: From placement, semantic communications to generative AI for mission-critical networks,
Z. Kaleem, F. A. Orakzai, W. Ishaq, K. Latif, J. Zhao, and A. Ja- malipour, “Emerging trends in UA Vs: From placement, semantic communications to generative AI for mission-critical networks,”IEEE Transactions on Consumer Electronics, vol. 71, no. 3, pp. 7412–7438, 2025
2025
-
[2]
A survey on uav control with multi-agent reinforcement learning,
C. C. Ekechi, T. Elfouly, A. Alouani, and T. M. Khattab, “A survey on uav control with multi-agent reinforcement learning,”Drones,
-
[3]
Available: https://api.semanticscholar.org/CorpusID: 280142119
[Online]. Available: https://api.semanticscholar.org/CorpusID: 280142119
-
[4]
Generalized multiagent reinforcement learning for coverage path planning in unknown, dynamic, and haz- ardous environments,
A. Henshall and S. Karaman, “Generalized multiagent reinforcement learning for coverage path planning in unknown, dynamic, and haz- ardous environments,”AIAA SCITECH 2024 Forum, 2024. [Online]. Available: https://api.semanticscholar.org/CorpusID:267343711
2024
-
[5]
Scalability bottlenecks in multi-agent reinforcement learning systems,
K. Gogineni, P. Wei, T. Lan, and G. Venkataramani, “Scalability bottlenecks in multi-agent reinforcement learning systems,”ArXiv, vol. abs/2302.05007, 2023. [Online]. Available: https://api.semanticscholar. org/CorpusID:256808299
arXiv 2023
-
[6]
Dqn-based joint uav trajectory and association planning in ntn-assisted networks,
A. A. Shamsabadi, C. Mwaba, T. Nugent, J. Gao, P. Madoery, H. Yanikomeroglu, and S. Pal, “Dqn-based joint uav trajectory and association planning in ntn-assisted networks,”arXiv preprint arXiv:2603.22127, 2026
arXiv 2026
-
[7]
Path planning with multiple uavs considering the sensing range and improved k-means clustering in wsns,
S. Kim and J. Park, “Path planning with multiple uavs considering the sensing range and improved k-means clustering in wsns,”Aerospace, vol. 10, no. 11, p. 939, 2023
2023
-
[8]
Joint resource and trajectory op- timization for energy efficiency maximization in uav-based networks,
T. V . Tung, T. T. An, and B. M. Lee, “Joint resource and trajectory op- timization for energy efficiency maximization in uav-based networks,” Mathematics, vol. 10, no. 20, p. 3840, 2022
2022
-
[9]
Joint optimization of trajectory and resource allocation for multi-uav-enabled wireless-powered communication networks,
C. Kim, H.-H. Choi, and K. Lee, “Joint optimization of trajectory and resource allocation for multi-uav-enabled wireless-powered communication networks,”IEEE Transactions on Communications, vol. 72, pp. 5752–5764, 2024. [Online]. Available: https://api. semanticscholar.org/CorpusID:268789122
2024
-
[10]
Phase and 3-D placement optimization for rate enhancement in ris-assisted UA V networks,
M. Misbah, Z. Kaleem, W. Khalid, C. Yuen, and A. Jamalipour, “Phase and 3-D placement optimization for rate enhancement in ris-assisted UA V networks,”IEEE Wireless Communications Letters, vol. 12, no. 7, pp. 1135–1138, 2023
2023
-
[11]
Quantum annealing for complex optimization in satellite communication systems,
T. Q. Dinh, S. H. Dau, E. Lagunas, S. Chatzinotas, D. N. Nguyen, and D. T. Hoang, “Quantum annealing for complex optimization in satellite communication systems,”IEEE Internet of VOLUME 00, 2026 7 Khoulaet al.: Quantum-Aware T rajectory Optimization (a) Total throughput (b) Per-user throughput FIGURE 5: Throughput performance comparison of the proposed RA...
2026
-
[12]
Quantum-annealing-based sum rate maximization for multi-uav-aided wireless networks,
S.-G. Jeong, P. D. A. Duc, Q. V . Do, D.-I. Noh, N. X. Tung, T. V . Chien, Q.-V . Pham, M. Hasegawa, H. Sekiya, and W. J. Hwang, “Quantum-annealing-based sum rate maximization for multi-uav-aided wireless networks,”IEEE Internet of Things Journal, vol. 12, pp. 21 225–21 239, 2025. [Online]. Available: https://api.semanticscholar.org/CorpusID:276580836
2025
-
[13]
Non-iterative optimization of trajectory and radio resource for aerial network,
H. Lyu, J. Jang, H. Lee, and H. J. Yang, “Non-iterative optimization of trajectory and radio resource for aerial network,”IEEE Transactions on Wireless Communications, vol. 24, pp. 1555–1567, 2024. [Online]. Available: https://api.semanticscholar.org/CorpusID:269502522
2024
-
[14]
Path planning for cellular- connected UA V: A DRL solution with quantum-inspired experience replay,
Y . Li, A. H. Aghvami, and D. Dong, “Path planning for cellular- connected UA V: A DRL solution with quantum-inspired experience replay,”IEEE Transactions on Wireless Communications, vol. 21, no. 10, pp. 7897–7912, 2022
2022
-
[15]
Layerwise quantum deep reinforcement learning for joint optimization of UA V trajectory and resource allocation,
Silvirianti, B. Narottama, and S. Y . Shin, “Layerwise quantum deep reinforcement learning for joint optimization of UA V trajectory and resource allocation,”IEEE Internet of Things Journal, vol. 11, no. 1, pp. 430–443, 2024
2024
-
[16]
Quantum-driven state-reduction for reliable UA V trajectory optimiza- tion in low-altitude networks,
Z. Kaleem, M. Afaq, C. Yuen, O. A. Dobre, and J. M. Cioffi, “Quantum-driven state-reduction for reliable UA V trajectory optimiza- tion in low-altitude networks,”IEEE Wireless Communications Letters, pp. 1–1, 2026
2026
-
[17]
Cooperative trajectory design of multiple uav base stations with heterogeneous graph neural networks,
X. Zhang, H. Zhao, J. Wei, C. c. Yan, J. Xiong, and X. Liu, “Cooperative trajectory design of multiple uav base stations with heterogeneous graph neural networks,”IEEE Transactions on Wireless Communications, vol. 22, no. 3, pp. 1495–1508, 2023. Khoula Khalidreceived Engineering Degree in Computer Programming and Specific Applications from the National Sc...
2023
-
[18]
de- gree in Computer Science, specializing in Artifi- cial Intelligence, at the National School of Ap- plied Sciences of Kenitra (ENSA-K), Morocco
Currently, she is pursuing her Ph.D. de- gree in Computer Science, specializing in Artifi- cial Intelligence, at the National School of Ap- plied Sciences of Kenitra (ENSA-K), Morocco. Her research interests include wireless communications, Unmanned Aerial Vehicles (UA Vs), and advanced computational intelligence. Specifically, her work focuses on vehicle...
2026
-
[19]
in Electron- ics Engineering from Hanyang University, and Inha University, South Korea in 2010 and 2016, respectively
He received MS and Ph.D. in Electron- ics Engineering from Hanyang University, and Inha University, South Korea in 2010 and 2016, respectively. Dr. Zeeshan consecutively received the National Research Productivity Award (RPA) awards from the Pakistan Council of Science and Technology (PSCT) in 2017 and 2018. We won the Runner-up Award in the National Hack...
2010
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.