On the Effect of Pulse Shaping Filters in Zak-OTFS Waveform for Radar Sensing
Pith reviewed 2026-06-29 00:50 UTC · model grok-4.3
The pith
Zak-OTFS radar with sinc and Gaussian-sinc filters offers superior target resolution when using interference mitigation receivers.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
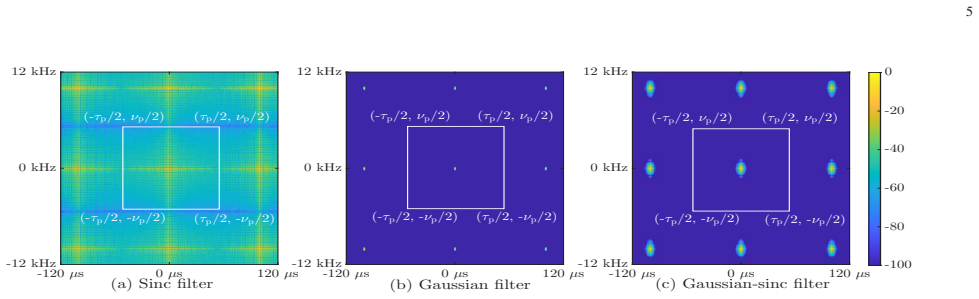
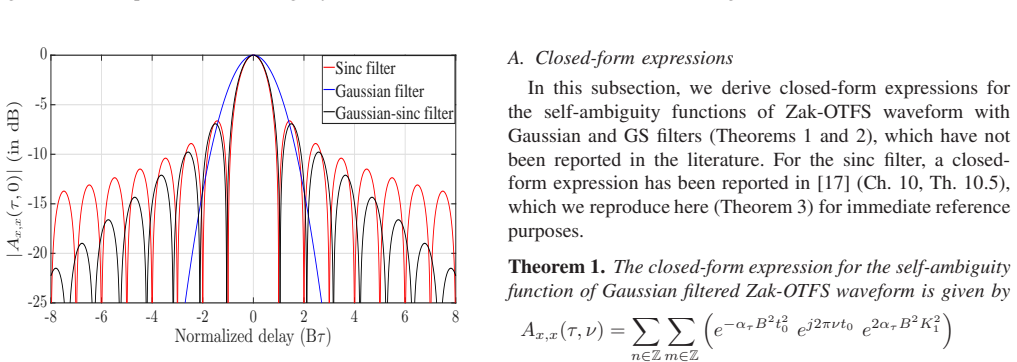
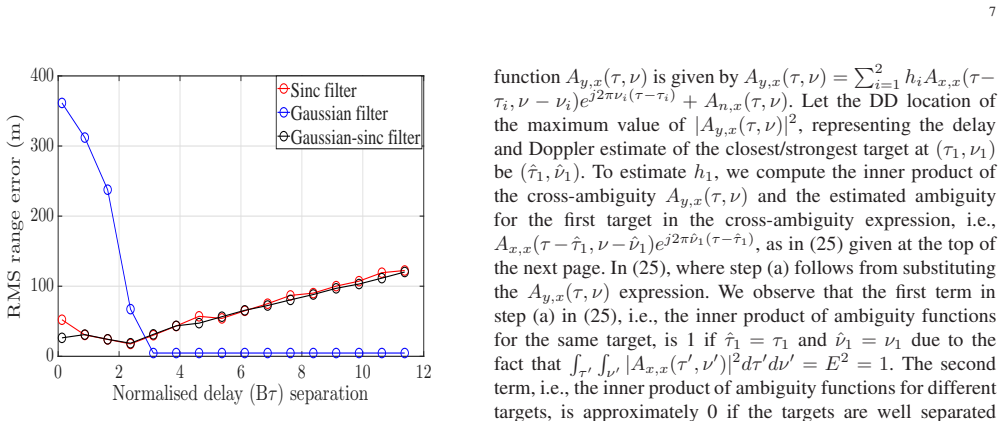
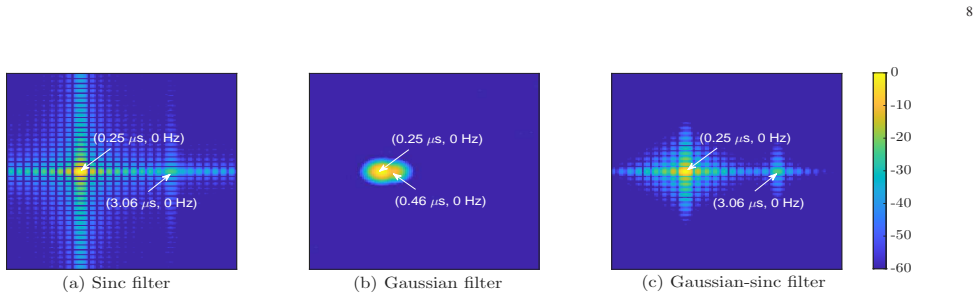
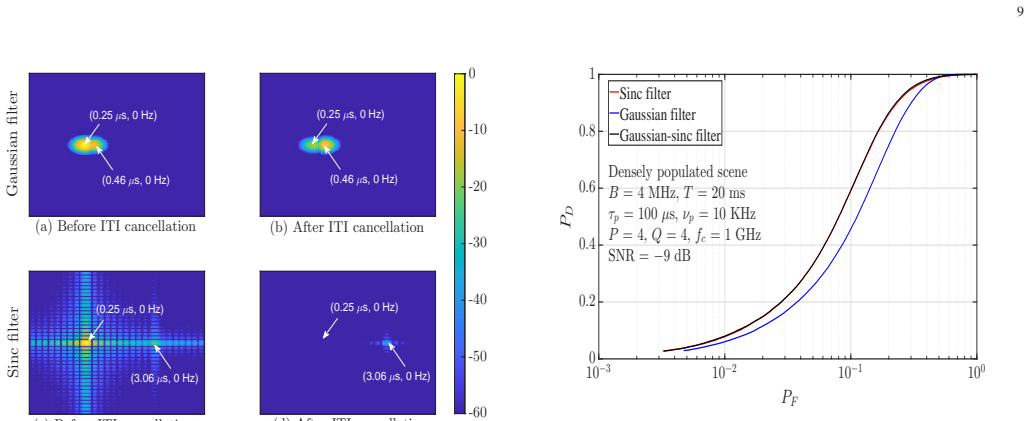
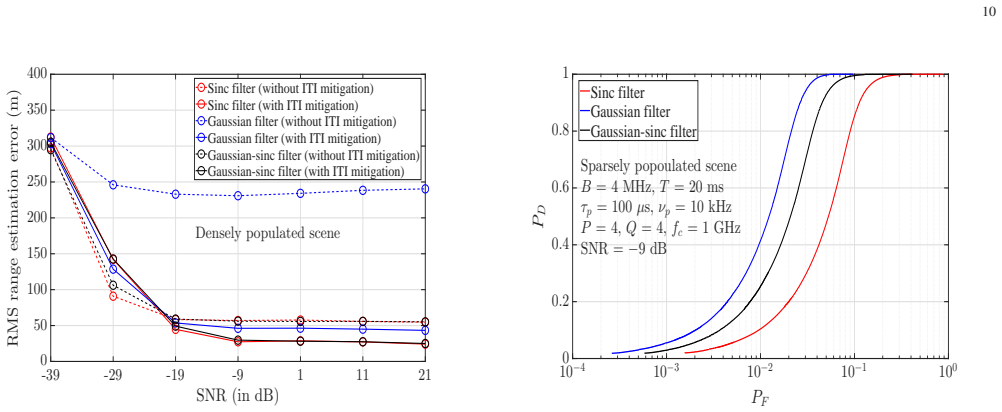
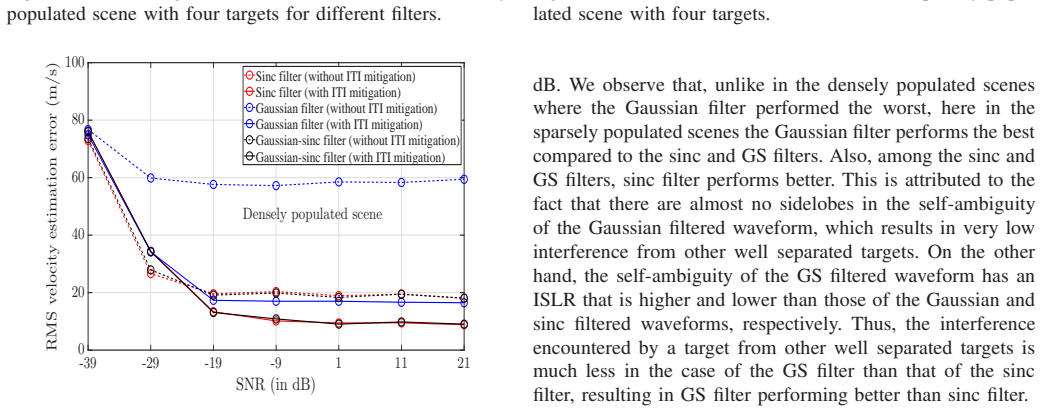
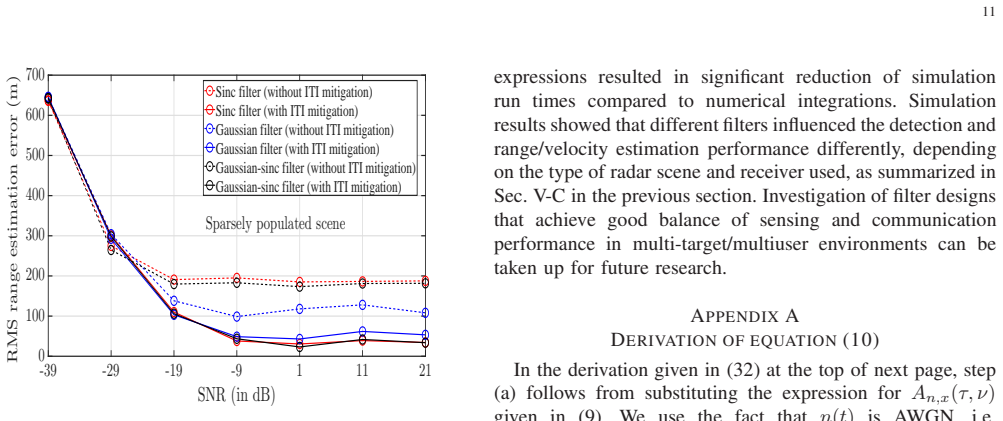
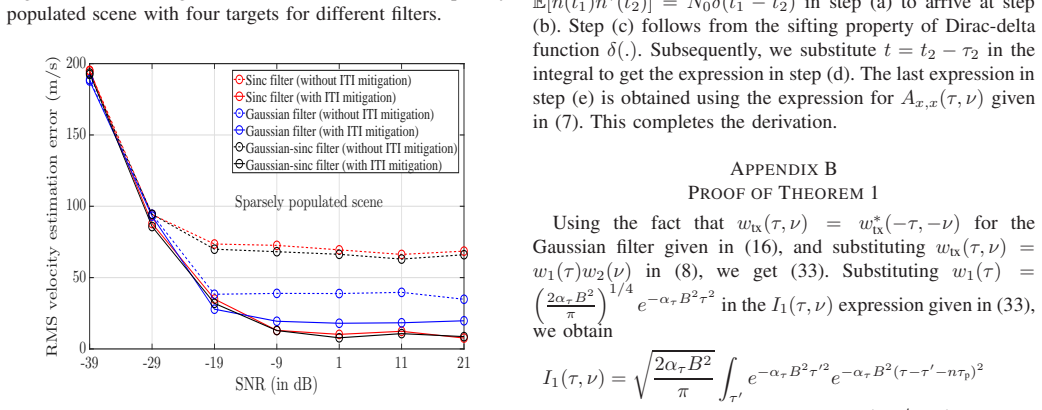
Closed-form expressions for the self-ambiguity functions of Zak-OTFS waveforms with sinc and GS filters are derived. The ambiguity functions of these filtered waveforms exhibit narrow main lobes that enhance resolvability in densely populated target scenes for peak-detection receivers, whereas the Gaussian filtered waveform's low sidelobes suit sparsely populated scenes. With inter-target interference mitigation at the receiver, sinc and GS filters outperform the Gaussian filter in both scene types.
What carries the argument
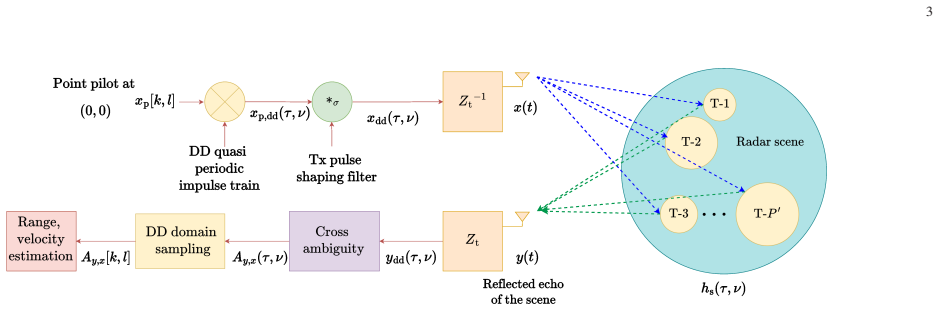
Self-ambiguity function of the Zak-OTFS waveform under different pulse shaping filters (sinc, GS, Gaussian), which governs the resolvability and detection of multiple targets.
If this is right
- Sinc and GS filters enable better performance in dense target scenes with basic receivers due to narrow main lobes.
- Gaussian filter provides advantages in sparse scenes with low sidelobes for basic receivers.
- Sinc and GS filters achieve superior results in both dense and sparse scenes when inter-target interference mitigation is applied.
Where Pith is reading between the lines
- Filter selection in Zak-OTFS radar may need to account for the specific receiver architecture employed.
- The derived expressions allow analytical comparison of filter performance for given target densities.
- The filter comparison approach could guide waveform design choices in related sensing modulations.
Load-bearing premise
The derived closed-form self-ambiguity expressions for the sinc and GS filters reflect actual system behavior without significant unaccounted effects from hardware imperfections or channel propagation.
What would settle it
Experimental measurement of the ambiguity function using a Zak-OTFS radar prototype with sinc, GS, and Gaussian filters, checking if the sidelobe and mainlobe characteristics match the analytical predictions in the presence of real hardware and propagation.
Figures
read the original abstract
In radar sensing, the self-ambiguity function of the probing waveform plays a crucial role in the resolvability and detection of multiple targets. In the recent Zak-OTFS based radar literature, Gaussian pulse shaping filter has been considered, and it has been shown to offer better range/velocity estimation performance compared to the traditional chirp waveform in scenes with multiple targets. While the self-ambiguity function with Gaussian filter has very low side lobes, its main lobe is wide which compromises resolvability and performance. Motivated by this, we seek filters with better ambiguity characteristics. Specifically, we explore two other known filters, namely, sinc and Gaussian-sinc (GS) filters, and demonstrate that these filters offer better performance compared to Gaussian filter under different scenarios and receiver processing. Towards demonstrating this, we derive closed-form expressions for the self-ambiguity functions of Zak-OTFS waveform with sinc and GS filters. The ambiguity functions of sinc and GS filtered waveforms have narrow main lobes, resulting in better resolvability in scenes with densely populated targets for the basic peak-detection based receiver. The ambiguity function of Gaussian filtered waveform has very low sidelobes, resulting in better performance in sparsely populated scenes. When a receiver with inter-target interference mitigation is used, the sinc and GS filters perform better in both dense and sparsely populated scenes compared to Gaussian filter.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript derives closed-form expressions for the self-ambiguity functions of Zak-OTFS radar waveforms when using sinc and Gaussian-sinc (GS) pulse-shaping filters, and compares their properties to the previously studied Gaussian filter. It claims that the narrower main lobes of the sinc and GS ambiguity functions improve resolvability in densely populated target scenes for a basic peak-detection receiver, while the Gaussian filter's low sidelobes are advantageous in sparse scenes; with an inter-target interference mitigation receiver, sinc and GS are asserted to outperform Gaussian in both dense and sparse scenes.
Significance. The closed-form self-ambiguity derivations for the additional filters constitute a concrete analytical contribution to the Zak-OTFS radar literature. If the claimed performance ordering is confirmed by end-to-end verification, the work would supply a practical guideline for filter selection that improves multi-target detection metrics.
major comments (1)
- [Abstract] Abstract (performance claims paragraph): the assertion that 'when a receiver with inter-target interference mitigation is used, the sinc and GS filters perform better in both dense and sparsely populated scenes compared to Gaussian filter' is load-bearing for the central contribution, yet the manuscript provides no explicit end-to-end simulation that incorporates the discrete Zak-OTFS modulator, finite-length pulses, or the mitigation processing step to confirm that the main-lobe-width ordering survives these non-ideal effects.
minor comments (1)
- The abstract states that closed-form expressions are derived but does not indicate the section or equation numbers where the full derivations, any accompanying error bounds, or the simulation parameters (SNR, target densities, mitigation algorithm details) appear.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. The major comment highlights a valid gap in verification for the performance claims involving the inter-target interference mitigation receiver. We address this point directly below.
read point-by-point responses
-
Referee: [Abstract] Abstract (performance claims paragraph): the assertion that 'when a receiver with inter-target interference mitigation is used, the sinc and GS filters perform better in both dense and sparsely populated scenes compared to Gaussian filter' is load-bearing for the central contribution, yet the manuscript provides no explicit end-to-end simulation that incorporates the discrete Zak-OTFS modulator, finite-length pulses, or the mitigation processing step to confirm that the main-lobe-width ordering survives these non-ideal effects.
Authors: We agree that the manuscript's claim for the mitigation receiver case rests on the closed-form self-ambiguity function analysis without explicit end-to-end verification that includes the discrete Zak-OTFS modulator, finite pulse lengths, and the mitigation algorithm. The ambiguity-function derivations establish the main-lobe width and sidelobe properties that underpin the expected ordering, but they do not directly simulate the full discrete processing chain. To strengthen the central contribution, we will add end-to-end simulations in the revision that incorporate these elements and confirm whether the main-lobe advantages of sinc and GS persist in both dense and sparse scenes under mitigation processing. revision: yes
Circularity Check
No significant circularity; new closed-form derivations are independent
full rationale
The paper derives closed-form self-ambiguity expressions for Zak-OTFS with sinc and GS filters (abstract and full text), then compares lobe widths and sidelobe levels to Gaussian (from prior literature). These steps are mathematical derivations under ideal assumptions, not reductions of outputs to fitted inputs or self-citations by construction. No self-definitional loops, no parameters fitted to data then relabeled as predictions, and no load-bearing uniqueness theorems imported from the same authors. The performance ordering claims rest on the derived expressions plus receiver models, which remain externally falsifiable. This is the normal non-circular case.
Axiom & Free-Parameter Ledger
axioms (2)
- standard math Self-ambiguity function properties follow standard radar signal definitions
- domain assumption Zak-OTFS waveform model as previously defined in the literature
Reference graph
Works this paper leans on
-
[1]
Future technology trends of terrestrial International Mobile Telecommunications systems towards 2030 and beyond ,
ITU-R M.2516, “Future technology trends of terrestrial International Mobile Telecommunications systems towards 2030 and beyond ,” Int. Telecom. Union Radio Commun., 2022
2030
-
[2]
Integrating sensing an d communi- cations for ubiquitous IoT: Applications, trends, and chal lenges,
Y . Cui, F. Liu, X. Jing, and J. Mu, “Integrating sensing an d communi- cations for ubiquitous IoT: Applications, trends, and chal lenges,” IEEE Network, vol. 35, no. 5, pp. 158-167, May 2021
2021
-
[3]
Integrated sensing and communications: T oward dual- functional wireless networks for 6G and beyond,
F. Liu et al., “Integrated sensing and communications: T oward dual- functional wireless networks for 6G and beyond,” IEEE J. Sel. Areas in Commun., vol. 40, no. 6, pp. 1728-1767, Jun. 2022
2022
-
[4]
Orthogonal time frequency space modul ation,
R. Hadani et al., “Orthogonal time frequency space modul ation,” Proc. IEEE WCNC’2017 , pp. 1-6, Mar. 2017
2017
-
[5]
Y . Hong, T. Thaj, and E. Viterbo, Delay-Doppler Communications: Principles and Applications , Academic Press, 2022
2022
-
[6]
S. S. Das and R. Prasad, Orthogonal Time Frequency Space Modulation - A W aveform for 6G , River Publishers, 2021
2021
-
[7]
Orthogonal time-frequency space modulat ion: a promising next-generation waveform,
Z. Wei et al., “Orthogonal time-frequency space modulat ion: a promising next-generation waveform,” IEEE Wireless Commun., vol. 28, no. 4, pp. 136-144, Aug. 2021
2021
-
[8]
On OTFS modulation for high- Doppler fading channels,
K. R. Murali and A. Chockalingam, “On OTFS modulation for high- Doppler fading channels,” Proc. ITA W orkshop, pp. 1-10, Feb. 2018
2018
-
[9]
Embedde d pilot-aided channel estimation for OTFS in delay-Doppler channels,
P . Raviteja, K. T. Phan, Y . Hong, and E. Viterbo, “Embedde d pilot-aided channel estimation for OTFS in delay-Doppler channels,” IEEE Trans. V eh. Tech., vol. 68, no. 5, pp. 4906-4917, May 2019
2019
-
[10]
O TFS channel estimation and data detection designs with superimposed pi lots,
H. B. Mishra, P . Singh, A. K. Prasad, and R. Budhiraja, “O TFS channel estimation and data detection designs with superimposed pi lots,” IEEE Trans. Wireless Commun. , vol. 21, no. 4, pp. 2258-2274, Apr. 2022. 14 I2, 1(τ, ν ) = Ω 2 ν j2πf 0T √ π 2α ν T 2 e− α ν T 2f 2 0 2 [ − e− jπf 0T ∫ T +nτp nτp e− π 2 2α ν T 2 x2 ejπf 0xdx + ejπf 0T ∫ nτp − T +nτp e−...
2022
-
[11]
On the effective- ness of OTFS for joint radar parameter estimation and commun ication,
L. Gaudio, M. Kobayashi, G. Caire, and G. Colavolpe, “On the effective- ness of OTFS for joint radar parameter estimation and commun ication,” IEEE Trans. Wireless Commun. , vol. 19, no. 9, pp. 5951-5965, Sep. 2020
2020
-
[12]
Orthog onal time frequency space (OTFS) modulation based radar system,
P . Raviteja, K. T. Phan, Y . Hong, and E. Viterbo, “Orthog onal time frequency space (OTFS) modulation based radar system,” Proc. IEEE RadarConf’2019 , pp. 1-6, Apr. 2019
2019
-
[13]
Y uan, Z
W. Y uan, Z. Wei, S. Li, J. Y uan, and D. W. K. Ng, ”Integrate d sensing and communication-assisted orthogonal time frequency spa ce transmis- sion for vehicular networks,” IEEE J. Sel. Topics in Sig. Process. , vol. 15, no. 6, pp. 1515-1528, Nov. 2021
2021
-
[14]
Chan nel and radar parameter estimation with fractional delay-Doppler using OTFS,
S. P . Muppaneni, S. R. Mattu, and A. Chockalingam, “Chan nel and radar parameter estimation with fractional delay-Doppler using OTFS,” IEEE Commun. Lett. , vol. 27, no. 5, pp. 1392-1396, May 2023
2023
-
[15]
OTFS — A mathematical foundation for communication and rad ar sensing in the delay-Doppler domain,
S. K. Mohammed, R. Hadani, A. Chockalingam, and R. Calde rbank, “OTFS — A mathematical foundation for communication and rad ar sensing in the delay-Doppler domain,” IEEE BITS the Inform. Theory Mag., vol. 2, no. 2, pp. 36-55, 1 Nov. 2022
2022
-
[16]
OTFS — Predictability in the delay-Doppler domain and its v alue to communication and radar sensing,
S. K. Mohammed, R. Hadani, A. Chockalingam, and R. Calde rbank, “OTFS — Predictability in the delay-Doppler domain and its v alue to communication and radar sensing,” IEEE BITS the Inform. Theory Mag. , vol. 3, no. 2, pp. 7-31, Jun. 2023
2023
-
[17]
S. K. Mohammed, R. Hadani, and A. Chockalingam, OTFS Modulation − Theory and Applications , IEEE Press-Wiley, 2024
2024
-
[18]
Zak-OTFS implementation via time an d frequency windowing,
S. Gopalam et al., “Zak-OTFS implementation via time an d frequency windowing,” IEEE Trans. Commun. , vol. 72, no. 7, pp. 3873-3889, Jul. 2024
2024
-
[19]
Zak-OTFS: pulse shaping and th e trade- off between time/bandwidth expansion and predictability,
J. Jayachandran et al., “Zak-OTFS: pulse shaping and th e trade- off between time/bandwidth expansion and predictability, ” online arxiv.org/abs/2405.02718, 4 May 2024
-
[20]
Zak-OTFS for identification of linear time-varying s ystems,
D. Nisar, S. K. Mohammed, R. Hadani, A. Chockalingam and R. Calder- bank, “Zak-OTFS for identification of linear time-varying s ystems,” IEEE Trans. Sig. Process. , doi: 10.1109/TSP .2026.3663357
work page doi:10.1109/tsp 2026
-
[21]
Instantan eous polarimetry with Zak-OTFS,
N. Mehrotra, S. R. Mattu, and R. Calderbank, “Instantan eous polarimetry with Zak-OTFS,” IEEE Trans. Radar Systems , vol. 3, pp. 1413-1420, 2025
2025
-
[22]
M. A. Richards, Fundamentals of radar signal processing , 2nd ed., McGraw-Hill Education, 2014
2014
-
[23]
The mathematics of radar,
W. Moran, “The mathematics of radar,” in Twentieth Cent ury Harmonic Analysis, J. S. Byrnes, ed., Kluwer, Dordrecht, The Netherl ands, 2001
2001
-
[24]
Identificatio n of linear time-varying systems through waveform diversity,
A. Harms, W. U. Bajwa, and R. Calderbank, “Identificatio n of linear time-varying systems through waveform diversity,” IEEE Trans. Sig. Process., vol. 63, no. 8, pp. 2070-2084, Apr. 2015
2070
-
[25]
Optimal Zak-OTFS receiver and its relation to the radar matched filte r,
S. Gopalam, H. Inaltekin, I. B. Collings, and S. V . Hanly , “Optimal Zak-OTFS receiver and its relation to the radar matched filte r,” IEEE Open J. Commun. Soc. , vol. 5, pp. 4462-4482, 2024
2024
-
[26]
A Gaussian-sin c pulse shaping filter for Zak-OTFS,
A. Das, F. Jesbin, and A. Chockalingam, “A Gaussian-sin c pulse shaping filter for Zak-OTFS,” IEEE Trans. V eh. Tech., vol. 75, no. 3, pp. 4307- 4322, Mar. 2026
2026
-
[27]
Closed-form ex pressions for I/O relation in Zak-OTFS with different delay-Doppler filte rs,
A. Das, F. Jesbin, and A. Chockalingam, “Closed-form ex pressions for I/O relation in Zak-OTFS with different delay-Doppler filte rs,” IEEE Trans. V eh. Tech., vol. 74, no. 9, pp. 14250-14266, Sep. 2025
2025
-
[28]
Accurate approximations for the complex error function with small imaginary argument
S. M. Abrarov and B. M. Quine, “Accurate approximations for the complex error function with small imaginary argument,” Online arXiv:1411.1024v2, 14 Nov. 2014
work page internal anchor Pith review Pith/arXiv arXiv 2014
-
[29]
Arbitrarily accurate analytical approx imations for the error function,
R. M. Howard, “Arbitrarily accurate analytical approx imations for the error function,” Math. Comput. Appl. , vol. 27, no. 1, p. 14, 2022
2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.