MCR-Bionic Hand: Anatomical Structural Priors for Dexterous Manipulation
Pith reviewed 2026-06-27 06:23 UTC · model grok-4.3
The pith
Copying specific human hand anatomy lets a robotic hand generate grasps and modulate forces through mechanical structure alone.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
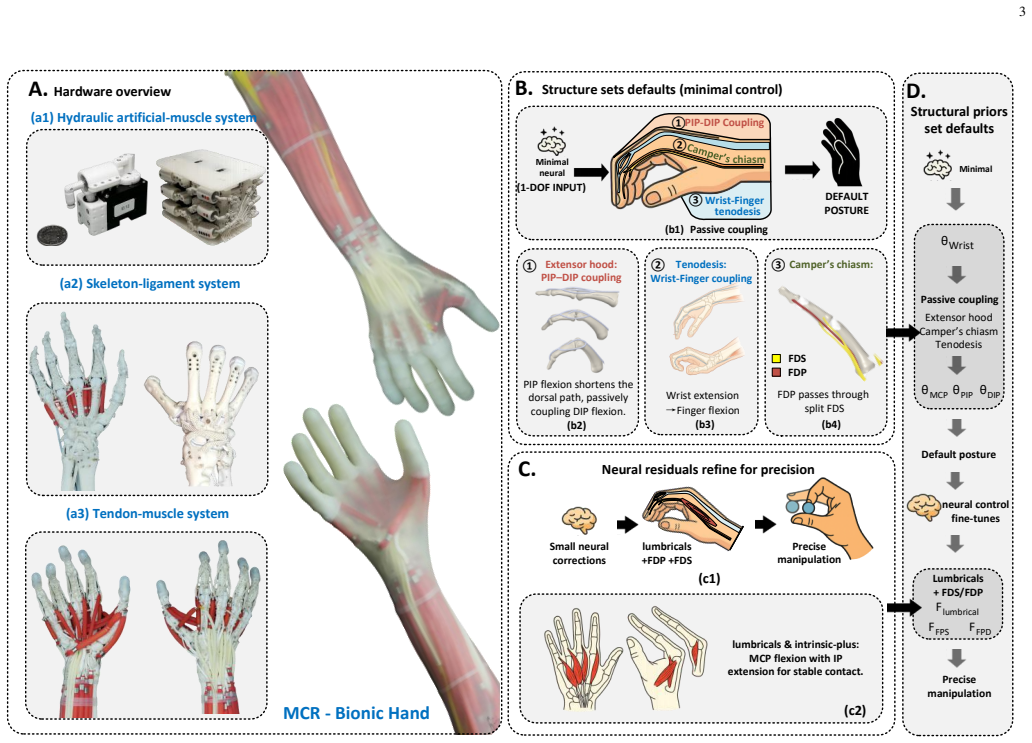
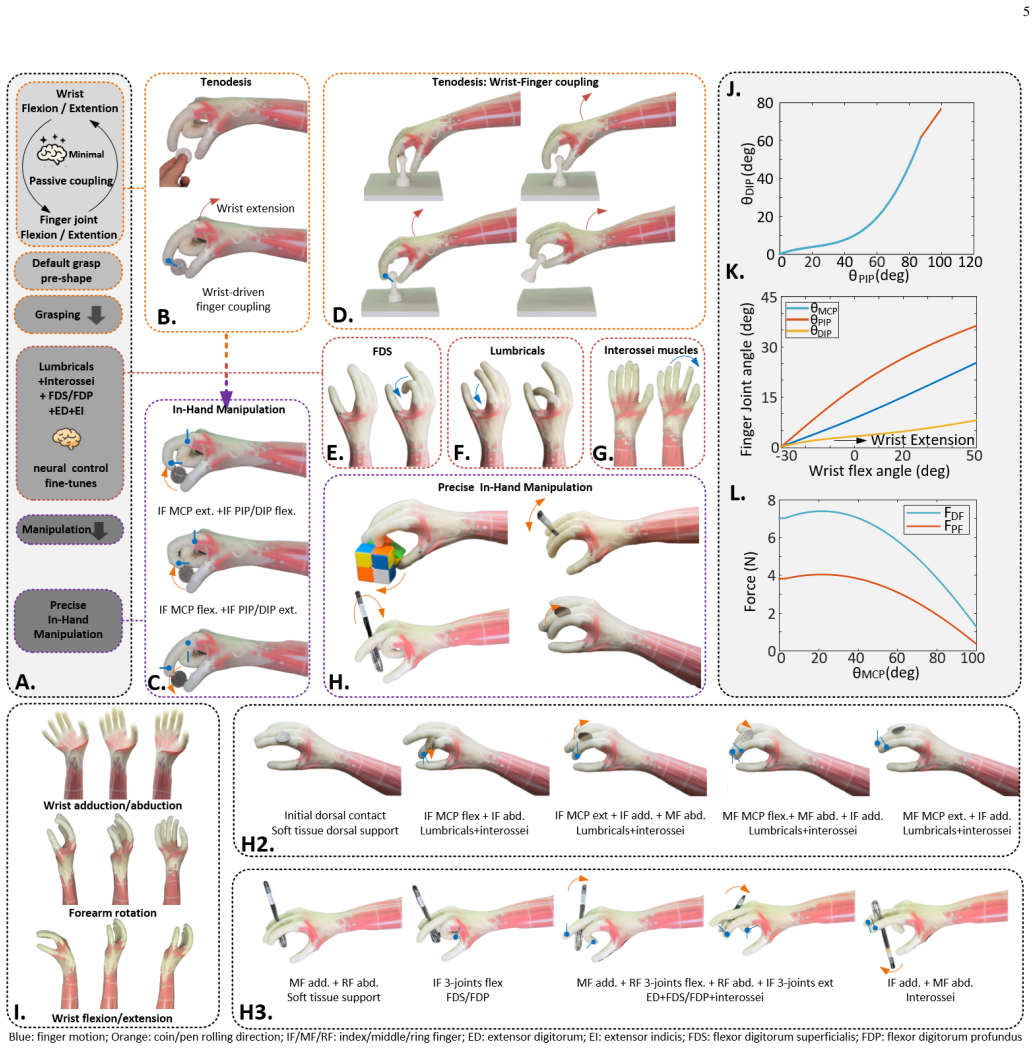
The paper claims that anatomical biomimetics identifies human hand structures that perform part of control, with the MCR-Bionic Hand showing that wrist posture induces multi-joint pre-shaping, the extensor hood maps PIP posture to a coupled DIP response, and intrinsic plus pathways modulate distal stability and fingertip action direction after grasp formation, enabling contact-rich tasks that link low-dimensional state generation with fine post-contact modulation.
What carries the argument
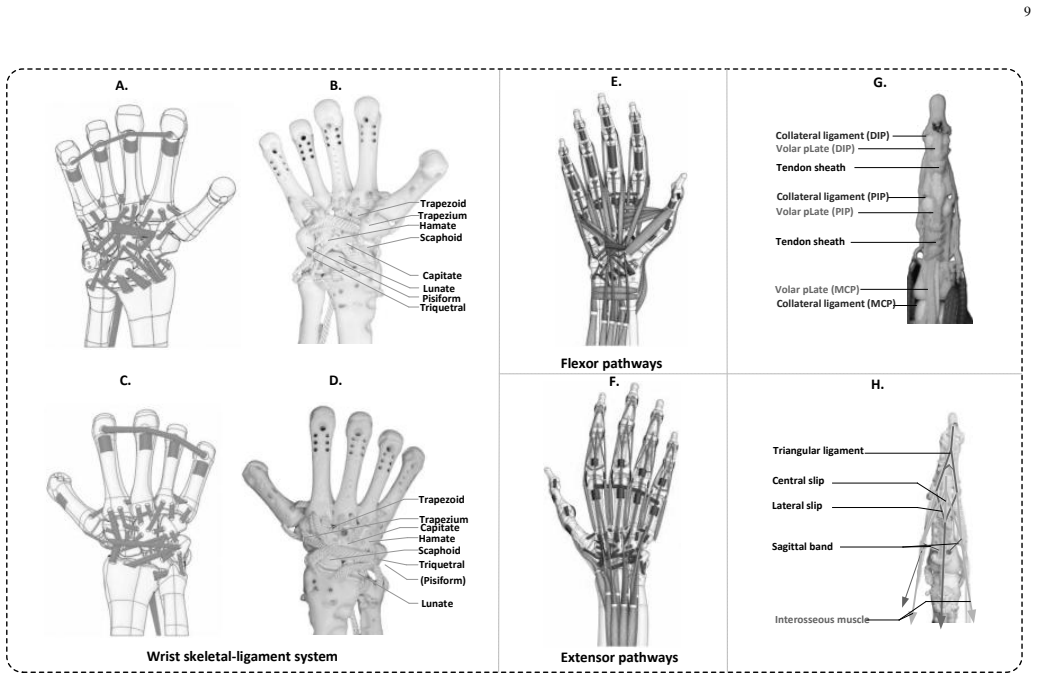
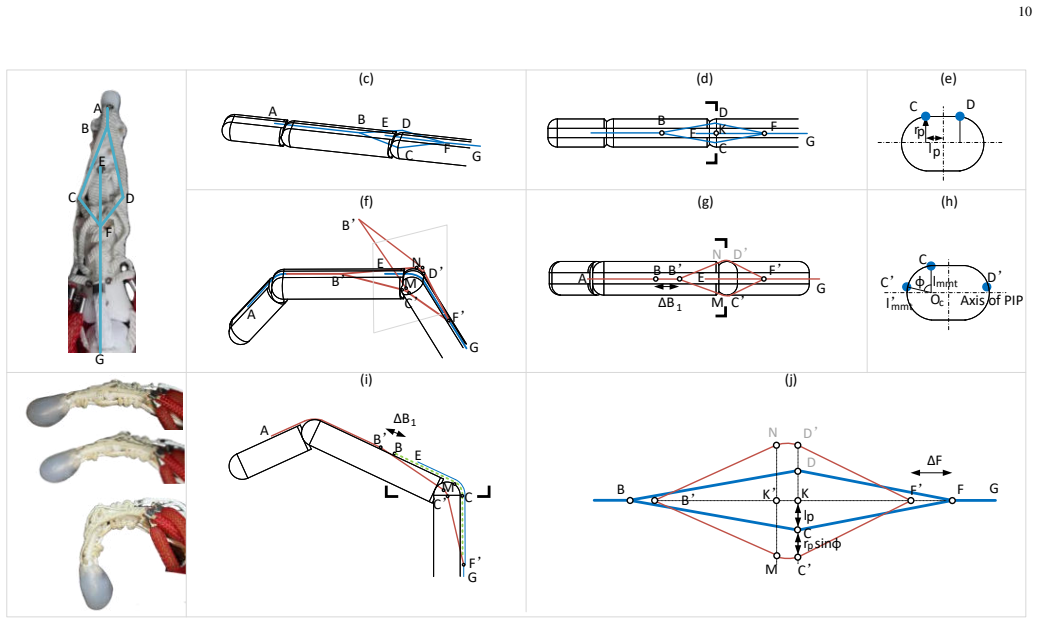
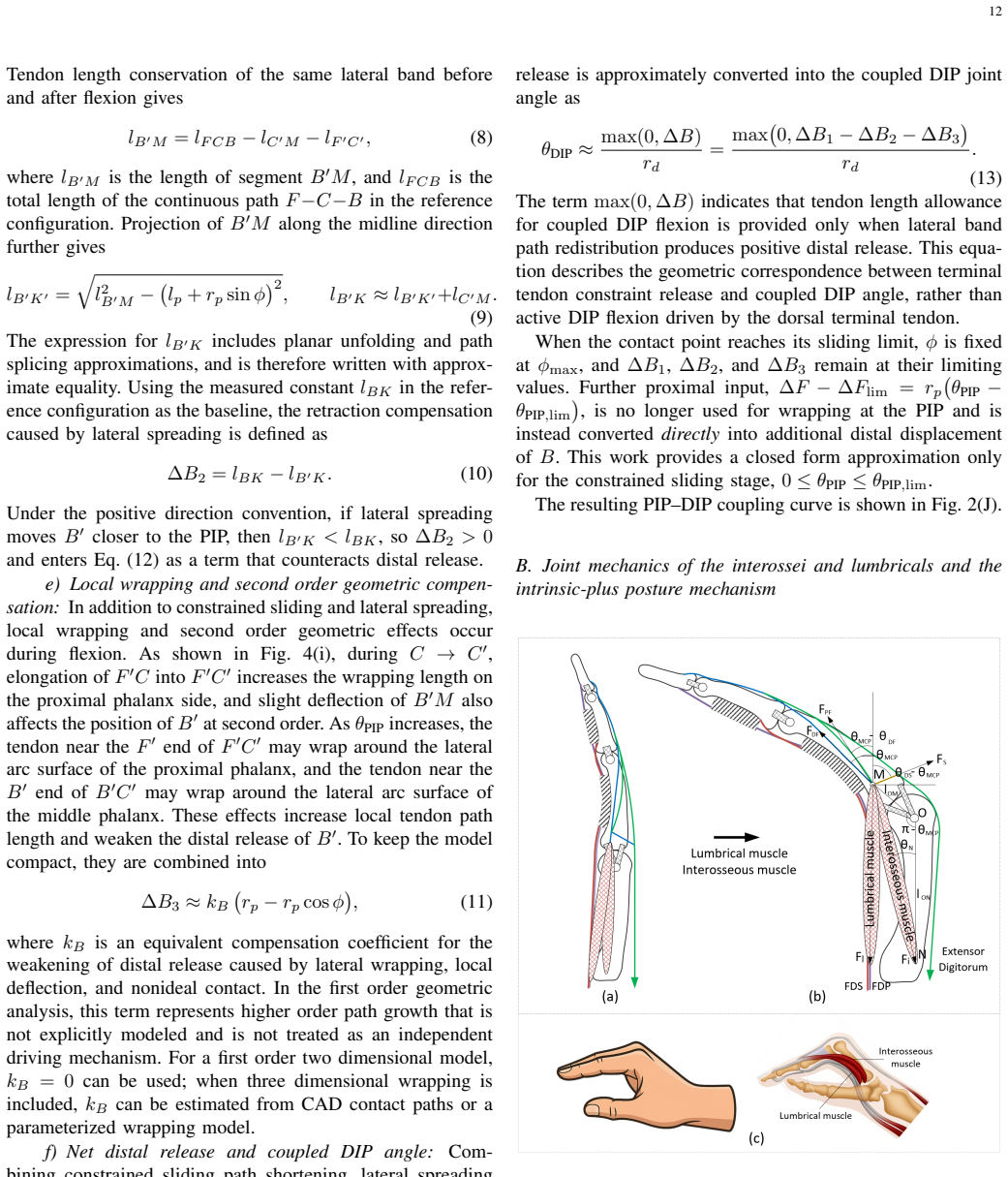
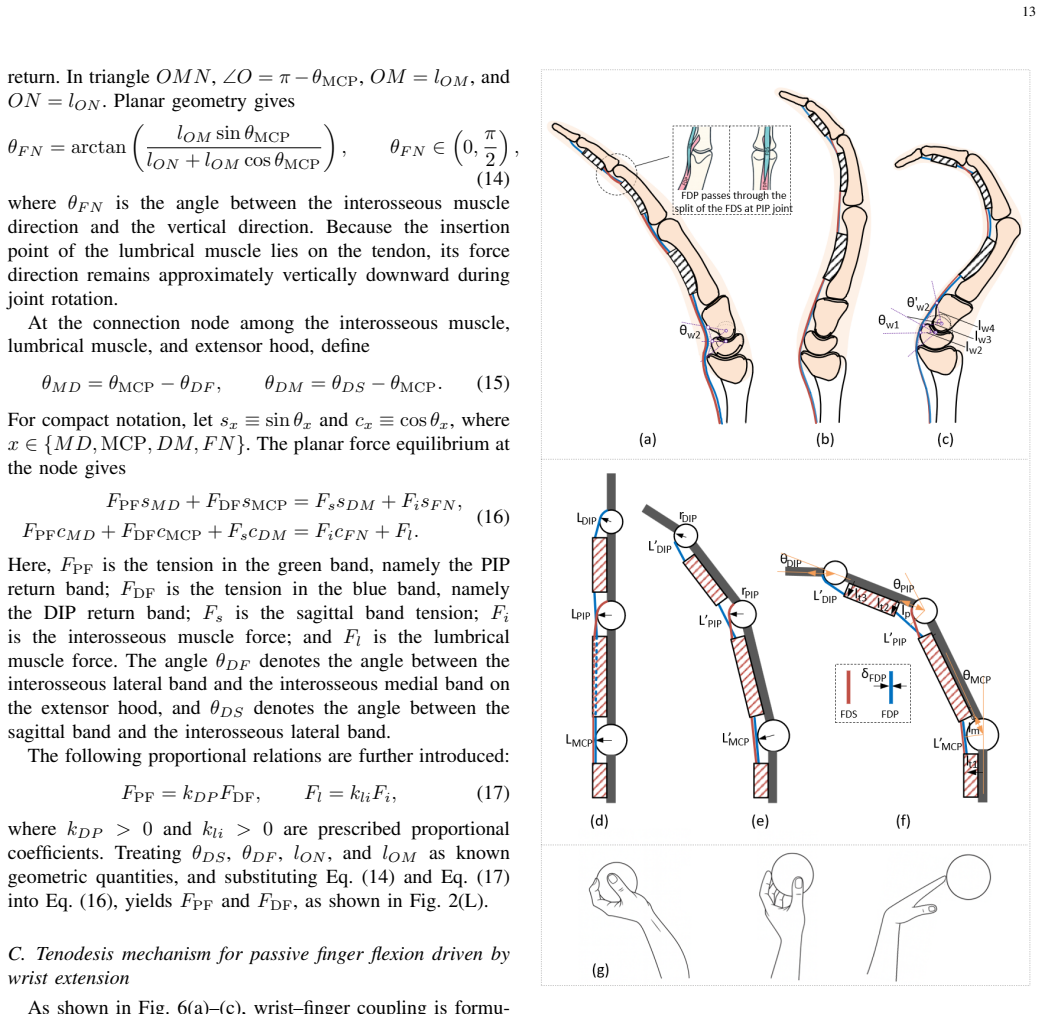
Two linked forms of structural intelligence: structural prior generation via wrist-to-finger tenodesis, FDS/FDP routing and the dorsal extensor hood, plus muscle-mediated modulation via extrinsic muscles, lumbricals and interossei that regulate MCP posture, distal stability and fingertip force paths.
If this is right
- Wrist posture alone induces multi-joint pre-shaping through tenodesis and routing without extra actuators.
- The extensor hood produces coupled PIP-to-DIP coordination from a single posture input.
- Intrinsic muscle pathways allow post-grasp adjustment of distal stability and fingertip force direction.
- Contact-rich tasks become feasible when low-dimensional state generation is combined with mechanical modulation.
Where Pith is reading between the lines
- The same structural-prior principle could be applied to other limbs to lower overall actuator and computation demands.
- Designs that vary ligament stiffness or tendon paths could reveal how much passive behavior is optimal versus how much must remain active.
- Integration with full-arm or torso mechanisms might extend the same low-dimensional control advantage to whole-body tasks.
- Testing the hand under reduced sensor feedback would show how far the mechanical priors can compensate for missing information.
Load-bearing premise
The observed task performance arises primarily from the copied anatomical structures rather than from unmentioned control algorithms, sensor feedback, or the specific fabrication tolerances of the prototype.
What would settle it
Construct an otherwise identical hand that lacks the anatomical tendon routings, ligament constraints and extensor hood, then test whether it can match the MCR-Bionic performance on the same coin-rotation and cube-manipulation tasks under identical low-dimensional control inputs.
Figures
read the original abstract
Dexterous robotic hands are usually formulated as high dimensional active control systems governed by degrees of freedom, actuation, and algorithms. Human hand dexterity, however, is partly encoded in the physical architecture of bones, ligaments, tendons, aponeuroses, and intrinsic muscles. This work describes that contribution as two linked forms of structural intelligence: structural prior generation, in which wrist to finger tenodesis, FDS/FDP routing, and the dorsal extensor hood transform low dimensional posture inputs into default grasp configurations and PIP to DIP coordination; and muscle mediated modulation, in which extrinsic muscles, lumbricals, and interossei regulate MCP posture, distal stability, fingertip force paths, and contact states around that default state. Based on this framework, MCR-Bionic Hand is developed as a 1:1 musculoskeletal biomimetic hand integrating a two row eight bone wrist, cross wrist tendons, anatomical flexor routing, volar plate and collateral ligament constraints, the dorsal extensor hood, and intrinsic muscle pathways within one body. Functional demonstrations and geometric mechanical models show that wrist posture induces multi joint pre shaping, the extensor hood maps PIP posture to a coupled DIP response, and intrinsic plus pathways modulate distal stability and fingertip action direction after grasp formation. Contact rich tasks, including coin rotation, pen transfer, dorsal coin flipping, and cube manipulation, show that MCR-Bionic links low dimensional state generation with fine post contact modulation. These results suggest that anatomical biomimetics is valuable not for visual similarity, but for identifying human hand structures that perform part of control.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims that human hand dexterity is partly encoded in physical anatomical structures (bones, ligaments, tendons, extensor hood, intrinsic muscles) rather than solely in high-dimensional control algorithms. It introduces the MCR-Bionic Hand as a 1:1 musculoskeletal biomimetic prototype incorporating a two-row wrist, anatomical flexor routing, volar plates, collateral ligaments, dorsal extensor hood, and intrinsic pathways. These are said to enable 'structural prior generation' (wrist-to-finger tenodesis and hood transforming low-dim inputs into grasp pre-shapes and PIP-DIP coordination) and 'muscle-mediated modulation' (regulating MCP posture, distal stability, and fingertip forces). Geometric models and functional demonstrations on tasks such as coin rotation, pen transfer, dorsal coin flipping, and cube manipulation are presented to support that the structures perform part of the control.
Significance. If the central attribution holds, the work would provide concrete evidence that specific anatomical structures can reduce the dimensionality of active control by encoding default behaviors and post-contact modulation, shifting emphasis from purely algorithmic approaches to hybrid structural intelligence in dexterous robotics.
major comments (2)
- [Abstract] Abstract: the claim that the listed structures 'perform part of control' (transforming low-dim inputs into pre-shapes and modulating post-contact forces) is load-bearing but unsupported by any ablation, quantitative metrics, or comparison; only functional demonstrations and geometric models are described, with no error bars, success rates, or baseline non-biomimetic hand under identical low-dim actuation.
- [Abstract] Abstract: no description of the actuation scheme, sensor feedback, or control policy used during the contact-rich tasks is provided, preventing isolation of the structural priors' contribution from possible implicit high-dimensional control or fabrication effects.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. The comments highlight important aspects of evidence presentation and experimental description that we will address. Below we respond point-by-point to the major comments.
read point-by-point responses
-
Referee: [Abstract] Abstract: the claim that the listed structures 'perform part of control' (transforming low-dim inputs into pre-shapes and modulating post-contact forces) is load-bearing but unsupported by any ablation, quantitative metrics, or comparison; only functional demonstrations and geometric models are described, with no error bars, success rates, or baseline non-biomimetic hand under identical low-dim actuation.
Authors: The geometric mechanical models in the manuscript provide explicit mechanistic quantification of how wrist-to-finger tenodesis, flexor routing, and the extensor hood map low-dimensional wrist inputs to multi-joint pre-shapes and PIP-DIP coordination, while intrinsic pathways alter post-contact force directions. The contact-rich task demonstrations illustrate that these behaviors emerge under low-dimensional tendon actuation without additional high-dimensional policies. We acknowledge that the absence of ablations against non-biomimetic baselines and statistical metrics (error bars, success rates) leaves the attribution partly qualitative. In revision we will add any available quantitative task metrics and explicitly discuss the limitations of the current evidence base. revision: partial
-
Referee: [Abstract] Abstract: no description of the actuation scheme, sensor feedback, or control policy used during the contact-rich tasks is provided, preventing isolation of the structural priors' contribution from possible implicit high-dimensional control or fabrication effects.
Authors: The full manuscript specifies tendon-driven actuation via motors pulling the extrinsic and intrinsic pathways, with low-dimensional open-loop position commands applied to wrist posture and muscle tensions. No closed-loop sensor feedback or high-dimensional controllers are employed; task performance relies on visual observation only. We will expand the methods and experimental sections to explicitly document the actuation hardware, command dimensionality, absence of feedback loops, and control policy so that the structural contribution can be more clearly isolated from fabrication or implicit control effects. revision: yes
Circularity Check
No circularity; physical design without mathematical reduction to inputs
full rationale
The paper presents a physical biomimetic robotic hand design copying human anatomical structures (wrist bones, tendons, extensor hood, intrinsics) and demonstrates task performance (coin rotation, pen transfer, etc.) via geometric models and prototypes. No equations, fitted parameters, predictions, or derivation chains appear in the provided text. Claims rest on physical implementation and empirical results rather than any self-referential definitions, fitted inputs renamed as predictions, or self-citation load-bearing steps. The central attribution of dexterity to structural priors is an empirical design claim, not a mathematical reduction that collapses to its own inputs by construction.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
F. J. Valero-Cuevas, ”Predictive modulation of muscle coordination pattern magnitude scales fingertip force magnitude over the voluntary range,” Journal of Neurophysiology, vol. 83, no. 3, pp. 1469–1479, 2000
2000
-
[2]
Garcia-Elias, K.-N
M. Garcia-Elias, K.-N. An, L. Berglund, R. L. Linscheid, W. P. Cooney III, and E. Y . Chao, ”Extensor mechanism of the fingers. i. a quantitative geometric study,” The Journal of hand surgery, vol. 16, no. 6, pp. 1130–1136, 1991
1991
-
[3]
J. N. Wilson, ”Providing automatic grasp by flexor tenodesis,” JBJS, vol. 38, no. 5, pp. 1019–1024, 1956
1956
-
[4]
K. N. Shah, J. D. Hodax, and J. A. Katarincic, ”Evaluating a flexor tendon laceration with the tenodesis effect,” The Journal of Pediatrics, vol. 176, pp. 214–214, 2016
2016
-
[5]
Landsmeer and C
J. Landsmeer and C. Long, ”The mechanism of finger control, based on electromyograms and location analysis,” Cells Tissues Organs, vol. 60, no. 3, pp. 330–347, 1965
1965
-
[6]
S. M. Craig, ”Anatomy of the joints of the fingers,” Hand clinics, vol. 8, no. 4, pp. 693–700, 1992
1992
-
[7]
R. W. Haines, ”The extensor apparatus of the finger,” Journal of anatomy, vol. 85, no. Pt 3, p. 251, 1951
1951
-
[8]
J. A. Clavero, P. Golan ´o, O. Farinas, X. Alomar, J. M. Monill, and M. Esplugas, ”Extensor mechanism of the fingers: Mr imaging–anatomic correlation,” Radiographics, vol. 23, no. 3, pp. 593–611, 2003
2003
-
[9]
Z. Li, V . Zatsiorsky, and M. Latash, ”Contribution of the extrinsic and intrinsic hand muscles to the moments in finger joints,” Clinical biomechanics, vol. 15, no. 3, pp. 203–211, 2000
2000
-
[10]
M. K. Goin, ”Structural and dynamic basis of hand surgery,” Plastic and Reconstructive Surgery, vol. 65, no. 6, pp. 846–847, 1980
1980
-
[11]
Hamada, K
Y . Hamada, K. Sairyo, N. Hibino, and A. Kobayashi, ”Correction of severe contracture of intrinsic plus hand with a modified ilizarov minifixator,” Journal of Hand and Microsurgery, vol. 7, no. 01, pp. 161–165, 2015
2015
-
[12]
Huang, D
Y . Huang, D. Fan, H. Duan, D. Yan, W. Qi, J. Sun, Q. Liu, and P. Wang, ”Human-like dexterous manipulation for anthropomorphic five-fingered hands: A review,” Biomimetic Intelligence and Robotics, p. 100212, 2025
2025
-
[13]
Zhang, P
N. Zhang, P. Zhou, X. Yang, F. Shen, J. Ren, T. Hou, L. Dong, R. Bian, D. Wang, G. Gu, et al., ”Biomimetic rigid-soft finger design for highly dexterous and adaptive robotic hands,” Science Advances, vol. 11, no. 17, p. eadu2018, 2025
2025
-
[14]
Zhang, J
N. Zhang, J. Ren, Y . Dong, X. Yang, R. Bian, J. Li, G. Gu, and X. Zhu, ”Soft robotic hand with tactile palm-finger coordination,” Nature Communications, vol. 16, no. 1, p. 2395, 2025
2025
-
[15]
Z. Zhao, W. Li, Y . Li, T. Liu, B. Li, M. Wang, K. Du, H. Liu, Y . Zhu, Q. Wang, et al., ”Embedding high-resolution touch across robotic hands enables adaptive human-like grasping,” Nature Machine Intelligence, pp. 1–12, 2025
2025
-
[16]
Sankar, W.-Y
S. Sankar, W.-Y . Cheng, J. Zhang, A. Slepyan, M. M. Iskarous, R. J. Greene, R. DeBrabander, J. Chen, A. Gupta, and N. V . Thakor, ”A natural biomimetic prosthetic hand with neuromorphic tactile sensing for precise and compliant grasping,” Science Advances, vol. 11, no. 10, p. eadr9300, 2025
2025
-
[17]
J. Luo, C. Xu, J. Wu, and S. Levine, ”Precise and dexterous robotic manipulation via human-in-the-loop reinforcement learning,” Science Robotics, vol. 10, no. 105, p. eads5033, 2025
2025
-
[18]
Kaneko, K
K. Kaneko, K. Harada, and F. Kanehiro, ”Development of multi-fingered hand for life-size humanoid robots,” Journal of the Robotics Society of Japan, vol. 26, no. 1, pp. 98–109, 2008
2008
-
[19]
Takaki and T
T. Takaki and T. Omata, ”High-performance anthropomorphic robot hand with grasping-force-magnification mechanism,” IEEE/ASME Transactions on mechatronics, vol. 16, no. 3, pp. 583–591, 2010
2010
-
[20]
Junge and J
K. Junge and J. Hughes, ”Adapt-teleop: robotic hand with human matched embodiment enables dexterous teleoperated manipulation,” npj Robotics, vol. 3, no. 1, p. 31, 2025
2025
-
[21]
Singh, M
A. Singh, M. Pinto, P. Kaltsas, S. Pirozzi, S. Sulaiman, and F. Ficuciello, ”Validations of various in-hand object manipulation strategies employing a novel tactile sensor developed for an under-actuated robot hand,” Frontiers in Robotics and AI, vol. 11, p. 1460589,2024
2024
-
[22]
M. G. Catalano, G. Grioli, E. Farnioli, A. Serio, C. Piazza, and A. Bicchi, ”Adaptive synergies for the design and control of the pisa/iit softhand,” The International Journal of Robotics Research, vol. 33, no. 5, pp. 768– 782, 2014
2014
-
[23]
Y . Jin, Y . Zheng, Y . Mao, Z. Li, L. Pan, B. Yang, S. Cai, S. Hussain, and G. Bao, ”An underactuated humanoid multi-finger dexterous hand with adaptive synergic grasping,” in International Conference on Intelligent Robotics and Applications. Springer, 2024, pp. 348–365
2024
-
[24]
AboZaid, M
Y . AboZaid, M. T. Aboelrayat, I. S. Fahim, and A. G. Radwan, ”Soft robotic grippers: A review on technologies, materials, and applications,” Sensors and Actuators A: Physical, vol. 372, p. 115380, 2024
2024
-
[25]
H. Hua, X. Wu, C. Zhao, Z. Wu, J. Song, and Z. Liao, ”Design and evaluation of a pneumatic underactuated robotic gripper with in-hand multi-mode self-perception ability,” Journal of Mechanical Science and Technology, pp. 1–11, 2025
2025
-
[26]
Ou Yang, S.-Y
C.-W. Ou Yang, S.-Y . Yu, C.-W. Chan, C.-Y . Tseng, J.-F. Cai, H.- P. Huang, and J.-Y . Juang, ”Enhancing the versatility and perfor- mance of soft robotic grippers, hands, and crawling robots through threedimensional-printed multifunctional buckling joints,” Soft Robotics, vol. 11, no. 5, pp. 741–754, 2024
2024
-
[27]
Malas, G
D. Malas, G. Zhang, S. Wang, W. Huang, L. Lindenroth, B. Yang, W. Xia, and H. Liu, ”Fluidic multichambered actuator and multiaxis intrinsic force sensing,” Soft Robotics, vol. 12, no. 1, pp. 81–94, 2025
2025
-
[28]
Riener, L
R. Riener, L. Rabezzana, and Y . Zimmermann, ”Do robots outperform humans in human-centered domains?” Frontiers in Robotics and AI, vol. 10, p. 1223946, 2023
2023
-
[29]
X. Wang, R. Wei, Z. Chen, H. Pang, H. Li, Y . Yang, Q. Hua, and G. Shen, ”Bioinspired intelligent soft robotics: From multidisci- plinary in- tegration to next-generation intelligence,” Advanced Science, p. e06296, 2025
2025
-
[30]
Y . Wang, T. Hao, Y . Liu, H. Xiao, S. Liu, and H. Zhu, ”Anthropomorphic soft hand: Dexterity, sensing, and machine learning,” in Actuators, vol. 13, no. 3. MDPI, 2024, p. 84
2024
-
[31]
Suthar, M
B. Suthar, M. I. Awad, L. Seneviratne, Y . Zweiri, and I. Hussain, ”Design of robotic finger using twisted string actuator with modular passive return rotational joints to achieve high grasping force: Application to wearable sixth finger,” Mechatronics, vol. 99, p. 103157, 2024
2024
-
[32]
J. T. Belter, J. L. Segil, et al., ”Mechanical design and performance specifications of anthropomorphic prosthetic hands: A review,” Journal of rehabilitation research and development, vol. 50, no. 5, p. 599, 2013
2013
-
[33]
Gopura, D
R. Gopura, D. Bandara, N. Gunasekera, V . Hapuarachchi, and B. Ariyarathna, ”A prosthetic hand with self-adaptive fingers,” in 2017 3rd international conference on control, automation and robotics (ICCAR). IEEE, 2017, pp. 269–274
2017
-
[34]
L. U. Odhner, L. P. Jentoft, M. R. Claffee, N. Corson, Y . Tenzer, R. R. Ma, M. Buehler, R. Kohout, R. D. Howe, and A. M. Dollar, ”A com- pliant, underactuated hand for robust manipulation,” The International Journal of Robotics Research, vol. 33, no. 5, pp. 736–752, 2014
2014
-
[35]
Deimel and O
R. Deimel and O. Brock, ”A novel type of compliant and underactuated robotic hand for dexterous grasping,” The International Journal of Robotics Research, vol. 35, no. 1-3, pp. 161–185, 2016
2016
-
[36]
Santos, G
B. Santos, G. Gonc ¸alves, and V . H. Pinto, ”Shadow dexterous hand: Kinematic retargeting algorithms comparison,” in International Confer- ence on Optimization, Learning Algorithms and Applications. Springer, 2025, pp. 144–156
2025
-
[37]
Grebenstein, M
M. Grebenstein, M. Chalon, W. Friedl, S. Haddadin, T. Wimb ¨ock, G. Hirzinger, and R. Siegwart, ”The hand of the dlr hand arm system: De- signed for interaction,” The International Journal of Robotics Research, vol. 31, no. 13, pp. 1531–1555, 2012. 16
2012
-
[38]
Z. Xu and E. Todorov, ”Design of a highly biomimetic anthropo- morphic robotic hand towards artificial limb regeneration,” in Pro- ceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 2016, pp. 3485–3492, doi: 10.1109/ICRA.2016.7487528
-
[39]
Ozawa, K
R. Ozawa, K. Hashirii, Y . Yoshimura, M. Moriya, and H. Kobayashi, ”Design and control of a three-fingered tendon-driven robotic hand with active and passive tendons,” Autonomous Robots, vol. 36, no. 1, pp. 67–78, 2014
2014
-
[40]
Y . Zhu, G. Wei, L. Ren, Z. Luo, and J. Shang, ”An anthropomorphic robotic finger with innate human-finger-like biomechanical advantages Part I: Design, ligamentous joint, and extensor mechanism,” IEEE Transactions on Robotics, vol. 39, no. 1, pp. 485–504, 2023, doi: 10.1109/TRO.2022.3200006
-
[41]
S. H. Sadati, M. ElDiwiny, S. Nurzaman, F. Iida, and T. Nanayakkara, ”Embodied intelligence & morphological computation in soft robotics community: Collaborations, coordination, and perspective,” in IOP Con- ference Series: Materials Science and Engineering, vol. 1261, no. 1. IOP Publishing, 2022, p. 012005
2022
-
[42]
D. Liu, L. He, D. Yang, J. Zhang, J. Chen, and G. Yang, ”Advances in digital twins technology of human skeletal muscle,” Sheng wu yi xue Gong Cheng xue za zhi= Journal of Biomedical Engineering= Shengwu Yixue Gongchengxue Zazhi, vol. 40, no. 4, pp. 784–791, 2023
2023
-
[43]
T. Sun, X. He, X. Song, L. Shu, and Z. Li, ”The digital twin in medicine: a key to the future of healthcare?” Frontiers in Medicine, vol. 9, p. 907066, 2022
2022
-
[44]
O. I. Franko, T. M. Winters, T. F. Tirrell, E. R. Hentzen, and R. L. Lieber, ”Moment arms of the human digital flexors,” Journal of biomechanics, vol. 44, no. 10, pp. 1987–1990, 2011
1987
-
[45]
Yang, S.-C
T.-H. Yang, S.-C. Lu, W.-J. Lin, K. Zhao, C. Zhao, K.-N. An, I.M. Jou, P.-Y . Lee, L.-C. Kuo, and F.-C. Su, ”Assessing finger joint biomechanics by applying equal force to flexor tendons in vitro using a novel simultaneous approach,” PloS one, vol. 11, no. 8, p. e0160301, 2016
2016
-
[46]
A. M. Kociolek and P. J. Keir, ”Modelling tendon excursions and moment arms of the finger flexors: anatomic fidelity versus function,” Journal of biomechanics, vol. 44, no. 10, pp. 1967–1973, 2011
1967
-
[47]
Shadow Dexterous Hand Technical Specification,
Shadow Robot Company, “Shadow Dexterous Hand Technical Specification,” Dec. 2024. [Online]. Available: https://shadowrobot. com/wp-content/uploads/2024/12/shadow dexterous hand e technical specification 20241204.pdf. Accessed: Jun. 7, 2026
2024
-
[48]
U. Kim, D. Jung, H. Jeong, J. Park, H.-M. Jung, J. Cheong, H. R. Choi, H. Do, and C. Park, ”Integrated linkage-driven dexterous anthropomorphic robotic hand,” Nature Communications, vol. 12, no. 1, p. 7177, 2021, doi: 10.1038/s41467-021-27261-0
-
[49]
Avail- able: https://allonic.co/
Allonic Inc., ”Allonic robotics and 3D tissue braiding.” [Online]. Avail- able: https://allonic.co/. Accessed: Jun. 7, 2026
2026
-
[50]
Available: https: //clonerobotics.com/hand/
Clone Robotics, ”Clone Hand.” [Online]. Available: https: //clonerobotics.com/hand/. Accessed: Jun. 7, 2026
2026
-
[51]
A. D. Deshpande, Z. Xu, M. J. Vande Weghe, B. H. Brown, J. Ko, L. Y . Chang, D. D. Wilkinson, S. M. Bidic, and Y . Matsuoka, ”Mechanisms of the anatomically correct testbed hand,” IEEE/ASME Transactions on Mechatronics, vol. 18, no. 1, pp. 238–250, 2013, doi: 10.1109/TMECH.2011.2166801
-
[52]
B. J. Tasi, M. Koller, and G. Cserey, ”Design of the anatomically correct, biomechatronic hand,” arXiv preprint arXiv:1909.07966, 2019, doi: 10.48550/arXiv.1909.07966
-
[53]
L. Tian, J. Zheng, N. Magnenat Thalmann, H. Li, Q. Wang, J. Tao, and Y . Cai, ”Design of a single-material complex structure anthropomorphic robotic hand,” Micromachines, vol. 12, no. 9, p. 1124, 2021, doi: 10.3390/mi12091124
-
[54]
H. Yang, G. Wei, L. Ren, Z. Qian, K. Wang, H. Xiu, and W. Liang, ”A low-cost linkage-spring-tendon-integrated compliant anthropomorphic robotic hand: MCR-Hand III,” Mechanism and Machine Theory, vol. 158, p. 104210, 2021, doi: 10.1016/j.mechmachtheory.2020.104210
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.