Topological Online Learning for Displacement-based Formation Control
Pith reviewed 2026-06-26 07:45 UTC · model grok-4.3
The pith
TOLD updates interaction weights online to minimize displacement-based formation distortion for single-integrator agents.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
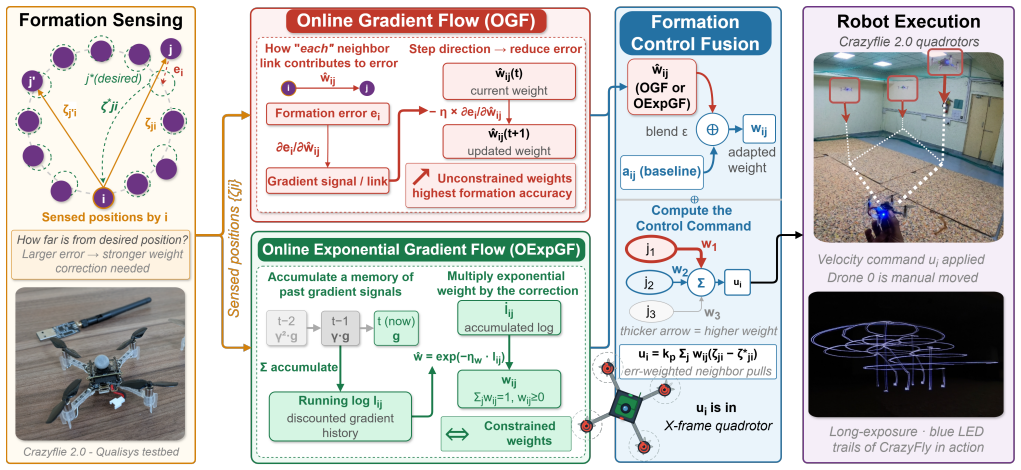
TOLD performs real-time edge-level weight adaptation via Online Gradient Flow or Online Exponential Gradient Flow; for single-integrator agents over directed graphs the exponential variant guarantees asymptotic consensus while the unconstrained variant guarantees bounded formation distortion.
What carries the argument
TOLD framework that updates interaction topology weights online with gradient flows to directly minimize formation distortion.
If this is right
- OExpGF produces asymptotic consensus on directed graphs for single-integrator agents.
- OGF keeps formation distortion bounded under the same dynamics.
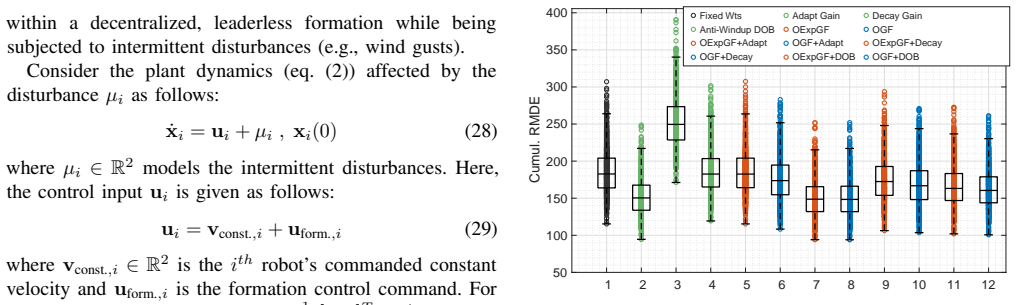
- Adding TOLD to node-level controllers yields 1.2 to 33.14 percent median cumulative Root Mean Distortion Error reduction in twelve-agent simulations.
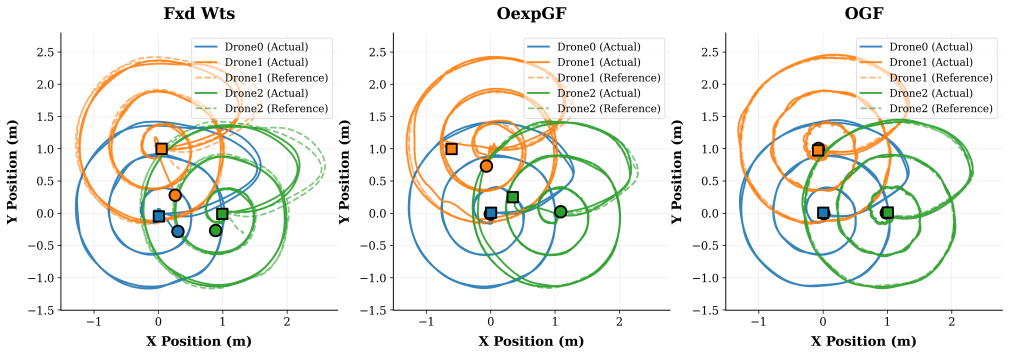
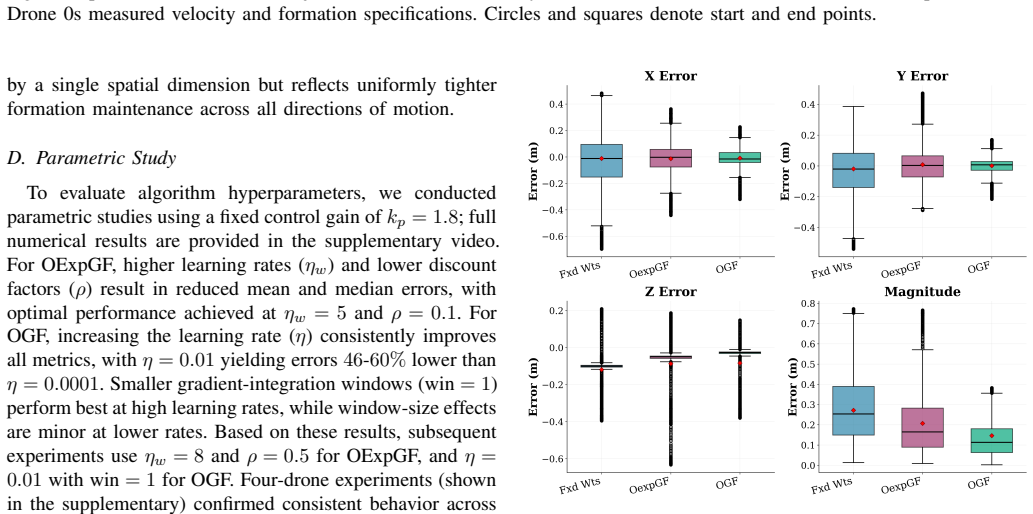
- Hardware trials with Crazyflie 2.0 quadrotors show greater than 62 percent median distortion reduction for OGF and 31.4 percent for OExpGF versus fixed-weight consensus.
Where Pith is reading between the lines
- The same edge-weight adaptation could be tested on tasks such as flocking or area coverage by replacing the distortion cost with the corresponding objective.
- Performance under packet loss or time-varying graphs remains unexamined and would require separate stability analysis.
Load-bearing premise
Agents obey single-integrator dynamics and weight updates can be performed without communication delays or unmodeled higher-order effects.
What would settle it
Deploy the controllers on agents with double-integrator dynamics or with added communication delays and check whether the reported consensus and distortion-reduction guarantees still hold.
Figures
read the original abstract
This paper addresses the problem of robust formation control by introducing Topological Online Learning for Displacement-based (TOLD) formation control, a real-time edge-level adaptation framework. Unlike conventional node-level robust controllers that regulate individual robot inputs without modifying the interaction topology, TOLD updates the interaction topology weights online to directly minimize formation distortion. Two strategies are proposed under the TOLD formation control framework: Online Gradient Flow (OGF) with unconstrained weights and Online Exponential Gradient Flow (OExpGF) with non-negative convex weights. Theoretical analysis establishes that, for single-integrator agents over directed graphs, OExpGF guarantees asymptotic consensus, while OGF ensures bounded formation distortion. Simulations with twelve robots under intermittent disturbances show 1.2%-33.14% median cumulative Root Mean Distortion Error reduction when augmenting TOLD with node-level controllers. Hardware experiments with Crazyflie 2.0 quadrotors demonstrate over 62% (OGF) and 31.4% (OExpGF) reduction in median formation distortion compared to fixed-weight consensus.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces the Topological Online Learning for Displacement-based (TOLD) formation control framework with two online weight-adaptation strategies—Online Gradient Flow (OGF) and Online Exponential Gradient Flow (OExpGF)—that update edge weights in real time to minimize formation distortion for displacement-based control. For single-integrator agents on directed graphs, the paper claims OExpGF guarantees asymptotic consensus while OGF ensures bounded distortion; simulations with twelve robots under disturbances report 1.2%–33.14% median cumulative Root Mean Distortion Error reduction when combined with node-level controllers, and hardware trials on Crazyflie 2.0 quadrotors claim >62% (OGF) and 31.4% (OExpGF) reductions in median formation distortion versus fixed-weight consensus.
Significance. If the central claims hold after addressing the dynamics gap, the work would provide a concrete edge-level online adaptation mechanism that augments existing node-level robust controllers, with explicit theoretical statements under single-integrator dynamics and quantitative hardware validation. The absence of free parameters in the core flows and the direct comparison to fixed-weight baselines are positive features that would strengthen the contribution to real-time topological learning in multi-robot systems.
major comments (2)
- [Theoretical Analysis] Theoretical Analysis section: the asymptotic consensus guarantee for OExpGF and bounded-distortion guarantee for OGF are derived exclusively under single-integrator dynamics on directed graphs. The hardware experiments apply the identical update laws to Crazyflie 2.0 quadrotors whose closed-loop dynamics are fourth-order cascaded attitude/position systems; no singular-perturbation argument, reduction lemma, or robustness margin is supplied showing that the online flows remain contractive or bounded under the increased plant order.
- [Hardware Experiments] Hardware Experiments section: the reported 62% (OGF) and 31.4% (OExpGF) median formation-distortion reductions are presented as evidence of TOLD efficacy, yet the manuscript supplies no analysis separating the contribution of the online weight updates from the inner-loop attitude controllers, communication delays, or the particular fixed-weight baseline chosen; without such separation the attribution to the topological adaptation cannot be rigorously established.
Simulated Author's Rebuttal
We thank the referee for the constructive comments regarding the scope of the theoretical guarantees and the interpretation of the hardware results. We respond to each major comment below.
read point-by-point responses
-
Referee: [Theoretical Analysis] Theoretical Analysis section: the asymptotic consensus guarantee for OExpGF and bounded-distortion guarantee for OGF are derived exclusively under single-integrator dynamics on directed graphs. The hardware experiments apply the identical update laws to Crazyflie 2.0 quadrotors whose closed-loop dynamics are fourth-order cascaded attitude/position systems; no singular-perturbation argument, reduction lemma, or robustness margin is supplied showing that the online flows remain contractive or bounded under the increased plant order.
Authors: We agree that the asymptotic consensus guarantee for OExpGF and the bounded-distortion guarantee for OGF are derived exclusively under single-integrator dynamics, as stated in the Theoretical Analysis section. The hardware experiments apply the same update laws to the velocity references of the quadrotors' inner-loop controllers and serve as empirical validation rather than a formal extension of the theory. No singular-perturbation or robustness analysis bridging the dynamics gap is provided in the manuscript. In the revised version we will add a clarifying remark in the Theoretical Analysis section stating the kinematic-level scope of the guarantees and noting that the experimental results are presented as practical evidence without claiming direct transfer of the asymptotic properties. This is a partial revision limited to improved exposition. revision: partial
-
Referee: [Hardware Experiments] Hardware Experiments section: the reported 62% (OGF) and 31.4% (OExpGF) median formation-distortion reductions are presented as evidence of TOLD efficacy, yet the manuscript supplies no analysis separating the contribution of the online weight updates from the inner-loop attitude controllers, communication delays, or the particular fixed-weight baseline chosen; without such separation the attribution to the topological adaptation cannot be rigorously established.
Authors: The hardware trials compare the TOLD framework (online weight adaptation) directly against a fixed-weight consensus baseline while keeping all other elements identical: the same Crazyflie 2.0 firmware, inner-loop attitude controllers, communication delays, and experimental conditions. The only difference between the two cases is the edge-weight policy. Consequently the observed reductions in median formation distortion are attributable to the online adaptation. We will revise the Hardware Experiments section to explicitly state this controlled comparison setup, thereby strengthening the attribution without requiring new experiments. revision: yes
Circularity Check
No circularity; derivation is self-contained
full rationale
The provided abstract and context describe a new TOLD framework whose OGF and OExpGF weight-update laws are defined directly, with theoretical guarantees (asymptotic consensus for OExpGF, bounded distortion for OGF) proved under single-integrator dynamics on directed graphs. Simulations and hardware results are presented as separate empirical checks rather than as inputs to the theory. No self-definitional equations, fitted parameters renamed as predictions, load-bearing self-citations, or ansatz smuggling appear in the given material. The derivation chain therefore does not reduce to its own inputs by construction.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Agents are modeled as single-integrator dynamics
- domain assumption Interaction topology is a directed graph
Reference graph
Works this paper leans on
-
[1]
Advancement challenges in uav swarm formation control: A comprehensive review
Y ajun Bu, Y e Y an, and Y ueneng Y ang. Advancement challenges in uav swarm formation control: A comprehensive review. Drones, 8(7):320, 2024
2024
-
[2]
Controlling forma- tions of multiple mobile robots
Jaydev P Desai, Jim Ostrowski, and Vijay Kumar. Controlling forma- tions of multiple mobile robots. In Proceedings. 1998 IEEE Interna- tional Conference on Robotics and Automation (Cat. No. 98CH36146) , volume 4, pages 2864–2869. IEEE, 1998
1998
-
[3]
High precision formation control of mobile robots using virtual structures
M Anthony Lewis and Kar-Han Tan. High precision formation control of mobile robots using virtual structures. Autonomous robots, 4:387– 403, 1997
1997
-
[4]
Formation flight control-a behavioral approach
Fabrizio Giulietti, Mario Innocenti, and Lorenzo Pollini. Formation flight control-a behavioral approach. In AIAA guidance, navigation, and control conference and exhibit , page 4239, 2001
2001
-
[5]
Consensus based formation control strategies for multi- vehicle systems
Wei Ren. Consensus based formation control strategies for multi- vehicle systems. In 2006 American Control Conference , pages 6–pp. IEEE, 2006
2006
-
[6]
Virtual leaders, artificial potentials and coordinated control of groups
Naomi Ehrich Leonard and Edward Fiorelli. Virtual leaders, artificial potentials and coordinated control of groups. In Proceedings of the 40th IEEE conference on decision and control (Cat. No. 01CH37228) , volume 3, pages 2968–2973. IEEE, 2001
2001
-
[7]
Optimal formation of multirobot systems based on a recurrent neural network
Y unpeng Wang, Long Cheng, Zeng-Guang Hou, Junzhi Y u, and Min Tan. Optimal formation of multirobot systems based on a recurrent neural network. IEEE transactions on neural networks and learning systems, 27(2):322–333, 2015
2015
-
[8]
Adaptive leader-follower formation control and obstacle avoidance via deep reinforcement learning
Y anlin Zhou, Fan Lu, George Pu, Xiyao Ma, Runhan Sun, Hsi-Y uan Chen, and Xiaolin Li. Adaptive leader-follower formation control and obstacle avoidance via deep reinforcement learning. In 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , pages 4273–4280. IEEE, 2019
2019
-
[9]
Consensus-based cooperative formation control with collision avoidance for a multi-uav system
Y asuhiro Kuriki and Toru Namerikawa. Consensus-based cooperative formation control with collision avoidance for a multi-uav system. In 2014 American control conference , pages 2077–2082. IEee, 2014
2014
-
[10]
Robust model-free formation control with prescribed performance for non- linear multi-agent systems
Charalampos P Bechlioulis and Kostas J Kyriakopoulos. Robust model-free formation control with prescribed performance for non- linear multi-agent systems. In 2015 IEEE International Conference on Robotics and Automation (ICRA) , pages 1268–1273. IEEE, 2015
2015
-
[11]
Vision-based distributed formation control with- out an external positioning system
Eduardo Montijano, Eric Cristofalo, Dingjiang Zhou, Mac Schwager, and Carlos Saguees. Vision-based distributed formation control with- out an external positioning system. IEEE Transactions on Robotics , 32(2):339–351, 2016
2016
-
[12]
Consensus of multia- gent systems with distance-dependent communication networks
Gangshan Jing, Y uanshi Zheng, and Long Wang. Consensus of multia- gent systems with distance-dependent communication networks. IEEE transactions on neural networks and learning systems , 28(11):2712– 2726, 2016
2016
-
[13]
Distributed consensus control of multiple uavs in a constrained environment
Gang Wang, Weixin Y ang, Na Zhao, Y unfeng Ji, Y antao Shen, Hao Xu, and Peng Li. Distributed consensus control of multiple uavs in a constrained environment. In 2020 IEEE International Conference on Robotics and Automation (ICRA) , pages 3234–3240. IEEE, 2020
2020
-
[14]
Distributed full-consensus control of multi-robot systems with range and field-of-view constraints
Esteban Restrepo, Antonio Loría, Ioannis Sarras, and Julien Marzat. Distributed full-consensus control of multi-robot systems with range and field-of-view constraints. In 2021 IEEE International Conference on Robotics and Automation (ICRA) , pages 1890–1895. IEEE, 2021
2021
-
[15]
Displacement-based formation control with predefined attitude over time-varying topologies
Zhen Li, Y ang Tang, Wenbing Zhang, and Tingwen Huang. Displacement-based formation control with predefined attitude over time-varying topologies. Automatica, 170:111852, 2024
2024
-
[16]
A robust formation control strategy for multi-agent systems with uncertainties via adaptive gain robust controllers
Shun Ito, Kaoru Ohara, Y oshikatsu Hoshi, Hidetoshi Oya, and Shunya Nagai. A robust formation control strategy for multi-agent systems with uncertainties via adaptive gain robust controllers. International Journal of Engineering & Technology Innovation , 11(2), 2021
2021
-
[17]
Formation control of multiagent systems with communication noise: A convex analysis approach
Zhen Li, Tingwen Huang, Y ang Tang, and Wenbing Zhang. Formation control of multiagent systems with communication noise: A convex analysis approach. IEEE Transactions on Cybernetics , 51(4):2253– 2264, 2019
2019
-
[18]
Robust formation control for multiagent systems based on adaptive observers
Bing Y an, Peng Shi, Cheng-Chew Lim, and Chengfu Wu. Robust formation control for multiagent systems based on adaptive observers. IEEE Systems Journal , 16(2):3139–3150, 2021
2021
-
[19]
End-to-end decentralized formation control using a graph neural network-based learning method
Chao Jiang, Xinchi Huang, and Yi Guo. End-to-end decentralized formation control using a graph neural network-based learning method. Frontiers in Robotics and AI , 10:1285412, 2023
2023
-
[20]
Graph neural network for decentralized multi-robot goal assignment
Manohari Goarin and Giuseppe Loianno. Graph neural network for decentralized multi-robot goal assignment. IEEE Robotics and Automation Letters , 9(5):4051–4058, 2024
2024
-
[21]
Fully distributed model- free flocking of multiple euler-lagrange systems
Mingkang Long, Yin Chen, and Housheng Su. Fully distributed model- free flocking of multiple euler-lagrange systems. IEEE Transactions on Signal and Information Processing over Networks , 10:565–573, 2024
2024
-
[22]
Learning by on-line gradient descent
Michael Biehl and Holm Schwarze. Learning by on-line gradient descent. Journal of Physics A: Mathematical and general , 28(3):643, 1995
1995
-
[23]
Convergence of exponenti- ated gradient algorithms
Simon I Hill and Robert C Williamson. Convergence of exponenti- ated gradient algorithms. IEEE Transactions on Signal Processing , 49(6):1208–1215, 2001
2001
-
[24]
Distributed consensus in multi-vehicle cooperative control, volume 27
Wei Ren and Randal W Beard. Distributed consensus in multi-vehicle cooperative control, volume 27. Springer, 2008
2008
-
[25]
Stability of multiagent systems with time-dependent com- munication links
Luc Moreau. Stability of multiagent systems with time-dependent com- munication links. IEEE Transactions on automatic control , 50(2):169– 182, 2005
2005
-
[26]
Distributed geodesic control laws for flocking of nonholonomic agents
Nima Moshtagh and Ali Jadbabaie. Distributed geodesic control laws for flocking of nonholonomic agents. IEEE Transactions on Automatic Control, 52(4):681–686, 2007
2007
-
[27]
Consensus problems in networks of agents with switching topology and time-delays
Reza Olfati-Saber and Richard M Murray. Consensus problems in networks of agents with switching topology and time-delays. IEEE Transactions on automatic control , 49(9):1520–1533, 2004
2004
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.