Structured-Li-GS: Structured 3D Gaussians Splatting with LiDAR Incorporation and Spatial Constraints
Pith reviewed 2026-06-29 01:49 UTC · model grok-4.3
The pith
LiDAR point clouds anchor and initialize 3D Gaussian primitives to achieve high-fidelity scene reconstruction without densification.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
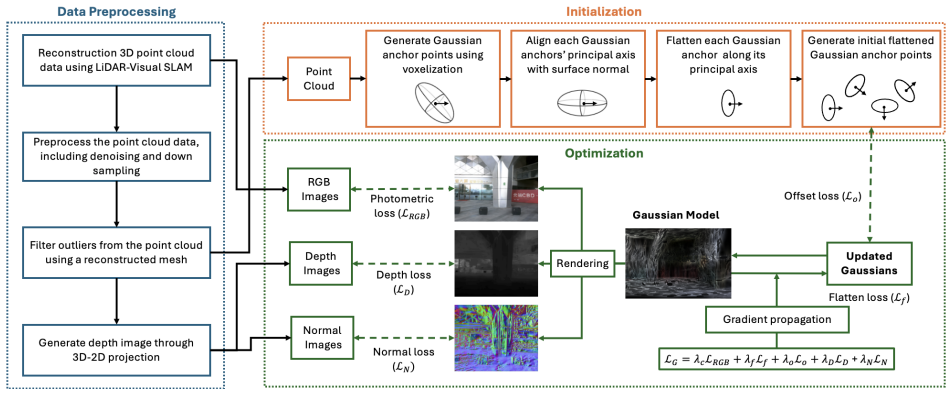
Gaussian primitives anchored to sub-sampled LiDAR point clouds, initialized from local surface geometry, and optimized with photometric, flattening, offset, depth, and normal losses guided by the dense point cloud enable accurate 3D reconstruction without any Gaussian densification.
What carries the argument
Anchoring of Gaussian primitives to sub-sampled LiDAR point clouds combined with initialization from local surface geometry and a multi-term loss function guided by the dense point cloud.
If this is right
- High-quality, up-to-scale reconstructions are obtained with moderate model size.
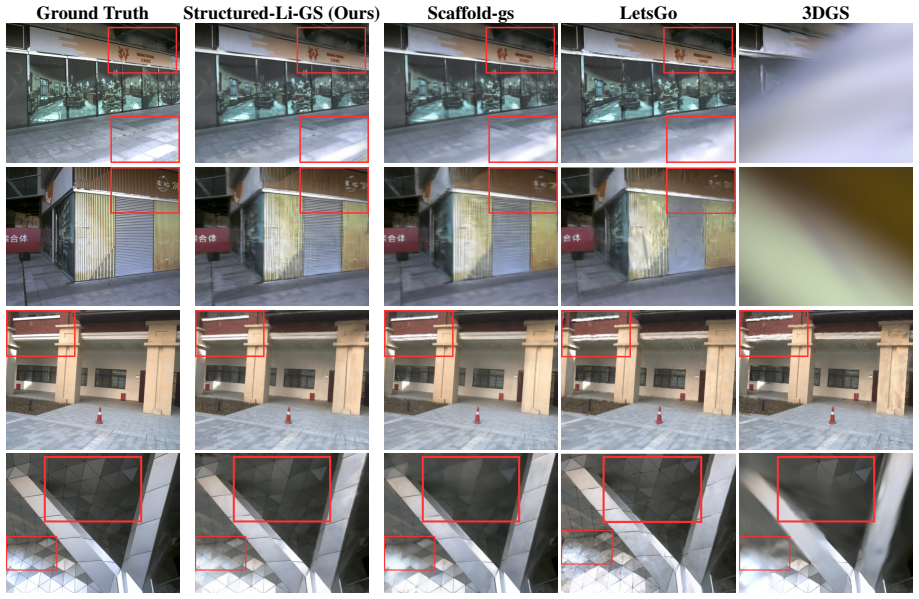
- The method surpasses state-of-the-art approaches on both benchmark datasets and real-world captured data.
- Accurate geometry is recovered without performing any Gaussian densification during training.
Where Pith is reading between the lines
- The same anchoring principle could be tested with other dense geometric sensors if their output density matches the current requirement.
- Memory and rendering costs in downstream applications may decrease because fewer primitives are needed.
- The approach indicates that external geometric constraints can substitute for adaptive densification in Gaussian-based representations.
Load-bearing premise
The LiDAR-inertial-visual SLAM pipeline supplies point clouds dense and accurate enough to serve as reliable anchors and training targets so that the listed loss terms produce faithful geometry without densification.
What would settle it
Running the method on point clouds from a sparser or less accurate SLAM pipeline and observing whether reconstruction error exceeds that of standard 3DGS with densification on the same scenes.
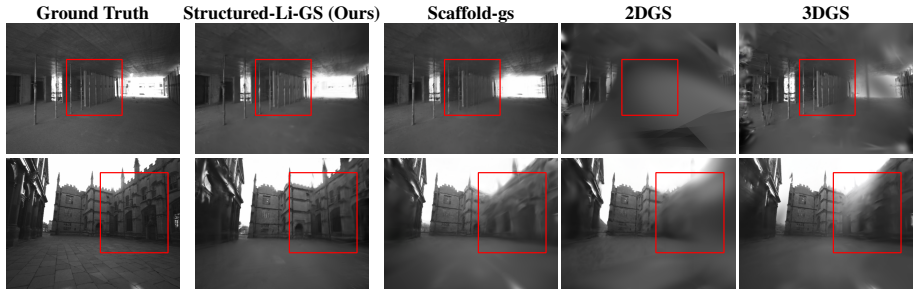
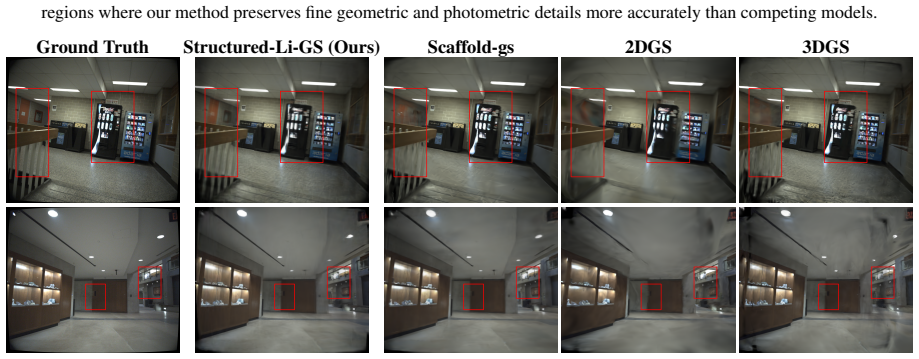
Figures

read the original abstract
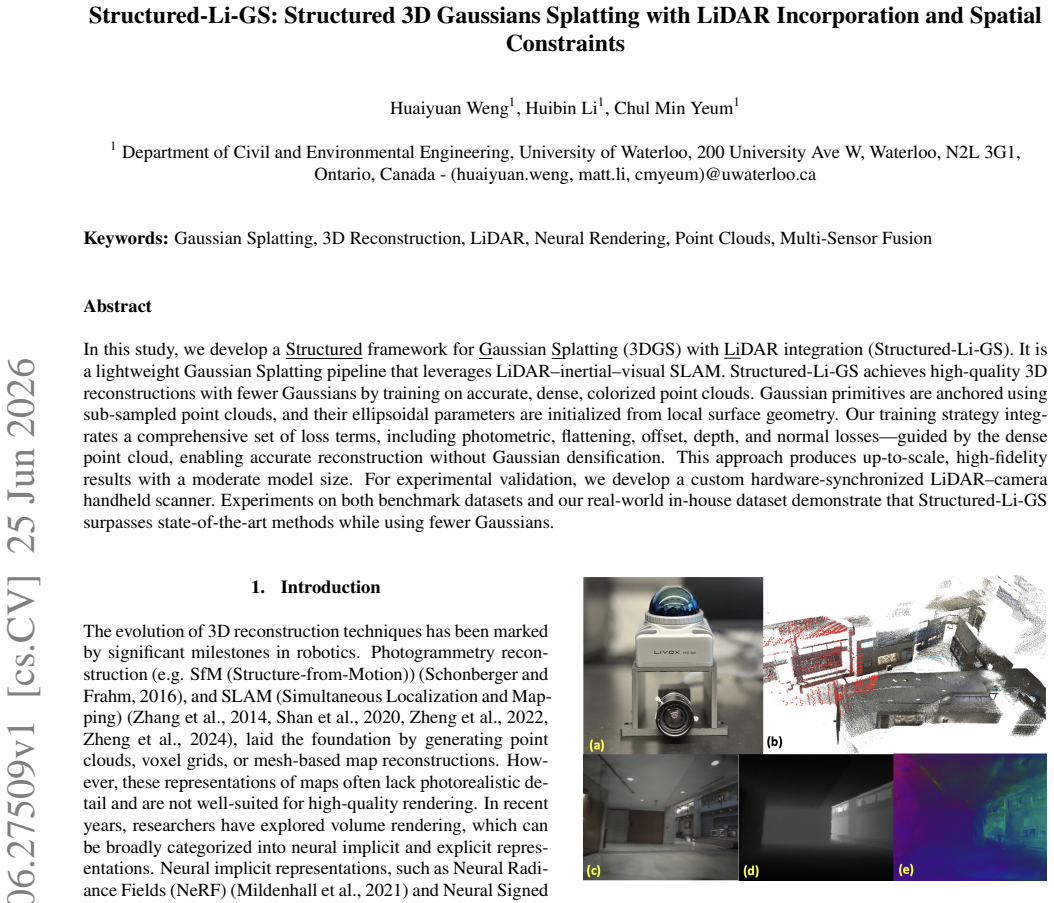
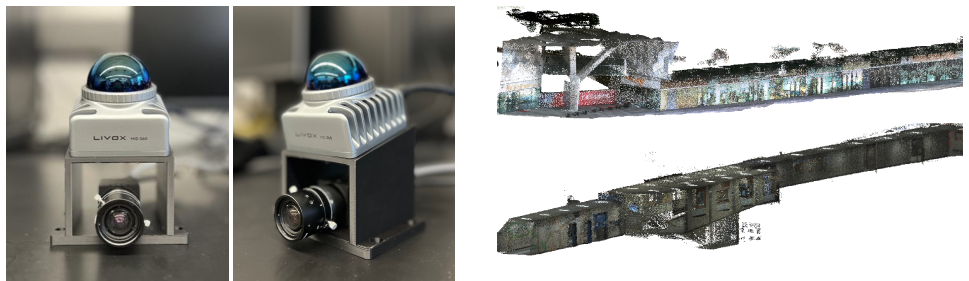
In this study, we develop a Structured framework for Gaussian Splatting (3DGS) with LiDAR integration (Structured-Li-GS). It is a lightweight Gaussian Splatting pipeline that leverages LiDAR-inertial-visual SLAM. Structured-Li-GS achieves high-quality 3D reconstructions with fewer Gaussians by training on accurate, dense, colorized point clouds. Gaussian primitives are anchored using sub-sampled point clouds, and their ellipsoidal parameters are initialized from local surface geometry. Our training strategy integrates a comprehensive set of loss terms, including photometric, flattening, offset, depth, and normal losses, guided by the dense point cloud, enabling accurate reconstruction without Gaussian densification. This approach produces up-to-scale, high-fidelity results with a moderate model size. For experimental validation, we develop a custom hardware-synchronized LiDAR-camera handheld scanner. Experiments on both benchmark datasets and our real-world in-house dataset demonstrate that Structured-Li-GS surpasses state-of-the-art methods while using fewer Gaussians.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces Structured-Li-GS, a 3D Gaussian Splatting pipeline that integrates LiDAR-inertial-visual SLAM output. Gaussians are anchored to sub-sampled point clouds with ellipsoidal parameters initialized from local surface geometry. Training employs photometric, flattening, offset, depth, and normal losses guided by the dense colorized point cloud, enabling reconstruction without any Gaussian densification step. The approach is claimed to yield up-to-scale, high-fidelity results with moderate model size and is validated on benchmark datasets plus a custom hardware-synchronized LiDAR-camera scanner dataset, where it reportedly surpasses prior methods while using fewer Gaussians.
Significance. If the quantitative claims hold and the no-densification strategy proves robust, the work could advance efficient multi-modal 3D reconstruction by reducing primitive count and replacing adaptive densification with structured geometric losses derived from LiDAR. The explicit use of point-cloud-guided losses and local-geometry initialization is a concrete strength that, if validated through ablations, would distinguish the contribution from standard 3DGS extensions.
major comments (2)
- [Abstract] Abstract: superiority over state-of-the-art is asserted without any numerical metrics (PSNR, SSIM, LPIPS, Gaussian count, or runtime) or ablation results; this absence makes it impossible to assess the magnitude or reliability of the central claim that the listed losses substitute for densification.
- [Method] Method (loss terms and anchoring description): the no-densification claim is load-bearing yet rests on the untested assumption that the SLAM-derived point cloud supplies uniformly sufficient density and accuracy; no analysis of local sparsity, SLAM drift effects, or ablation removing the densification prohibition is referenced, leaving the robustness of the fixed primitive set unverified.
minor comments (2)
- [Abstract] The abstract would be strengthened by including at least one key quantitative comparison (e.g., Gaussian count reduction and PSNR delta versus 3DGS).
- [Method] Loss-term weighting scheme is described as comprehensive but the specific values or scheduling are not detailed; adding an equation or table for the combined loss would improve reproducibility.
Simulated Author's Rebuttal
We thank the referee for the constructive comments on our manuscript. We address each major comment point by point below, indicating planned revisions where appropriate.
read point-by-point responses
-
Referee: [Abstract] Abstract: superiority over state-of-the-art is asserted without any numerical metrics (PSNR, SSIM, LPIPS, Gaussian count, or runtime) or ablation results; this absence makes it impossible to assess the magnitude or reliability of the central claim that the listed losses substitute for densification.
Authors: We agree that the abstract would be strengthened by including key quantitative metrics. In the revised manuscript, we will update the abstract to report representative values such as average PSNR, SSIM, and LPIPS improvements, along with Gaussian counts and runtime comparisons against state-of-the-art methods. revision: yes
-
Referee: [Method] Method (loss terms and anchoring description): the no-densification claim is load-bearing yet rests on the untested assumption that the SLAM-derived point cloud supplies uniformly sufficient density and accuracy; no analysis of local sparsity, SLAM drift effects, or ablation removing the densification prohibition is referenced, leaving the robustness of the fixed primitive set unverified.
Authors: The no-densification strategy is enabled by the dense, colorized point cloud from LiDAR-inertial-visual SLAM for both initialization and the multi-term losses (photometric, depth, normal, flattening, offset). Experiments across benchmark datasets and our custom hardware-synchronized scanner dataset support the approach with fewer primitives. We acknowledge that explicit analysis of local sparsity, SLAM drift, and further clarification of the fixed-set robustness would improve the paper; we will add a discussion section addressing these points in the revision. revision: partial
Circularity Check
No circularity: method description uses external SLAM inputs and standard losses
full rationale
The abstract and method summary describe anchoring Gaussians to sub-sampled point clouds from LiDAR-inertial-visual SLAM, initializing ellipsoids from local geometry, and optimizing with photometric, flattening, offset, depth, and normal losses to avoid densification. No equations, fitted parameters renamed as predictions, or self-citation chains are present in the provided text. The result depends on input point-cloud quality as an external assumption, not a self-referential reduction. This matches the default case of a self-contained empirical method without load-bearing circular steps.
Axiom & Free-Parameter Ledger
free parameters (1)
- loss term weights
axioms (1)
- domain assumption LiDAR-inertial-visual SLAM produces accurate, dense, colorized point clouds suitable for direct Gaussian anchoring
Reference graph
Works this paper leans on
-
[1]
3D Gaussian Splatting for Real-Time Radiance Field Rendering , journal =
Kerbl, Bernhard and Kopanas, Georgios and Leimk. 3D Gaussian Splatting for Real-Time Radiance Field Rendering , journal =. 2023 , url =
2023
-
[2]
, author=
LOAM: Lidar odometry and mapping in real-time. , author=. Robotics: Science and systems , pages=. 2014 , organization=
2014
-
[3]
IEEE Transactions on Robotics , volume=
Fast-lio2: Fast direct lidar-inertial odometry , author=. IEEE Transactions on Robotics , volume=. 2022 , publisher=
2022
-
[4]
2022 IEEE/RSJ international conference on intelligent robots and systems (IROS) , pages=
Fast-livo: Fast and tightly-coupled sparse-direct lidar-inertial-visual odometry , author=. 2022 IEEE/RSJ international conference on intelligent robots and systems (IROS) , pages=. 2022 , organization=
2022
-
[5]
IEEE Transactions on Robotics , year=
Fast-livo2: Fast, direct lidar-inertial-visual odometry , author=. IEEE Transactions on Robotics , year=
-
[6]
2020 IEEE/RSJ international conference on intelligent robots and systems (IROS) , pages=
Lio-sam: Tightly-coupled lidar inertial odometry via smoothing and mapping , author=. 2020 IEEE/RSJ international conference on intelligent robots and systems (IROS) , pages=. 2020 , organization=
2020
-
[7]
Robotics and Autonomous Systems , volume=
ColMap: A memory-efficient occupancy grid mapping framework , author=. Robotics and Autonomous Systems , volume=. 2021 , publisher=
2021
-
[8]
Communications of the ACM , volume=
Nerf: Representing scenes as neural radiance fields for view synthesis , author=. Communications of the ACM , volume=. 2021 , publisher=
2021
-
[9]
Proceedings of the IEEE/CVF conference on computer vision and pattern recognition , pages=
Deepsdf: Learning continuous signed distance functions for shape representation , author=. Proceedings of the IEEE/CVF conference on computer vision and pattern recognition , pages=
-
[10]
Proceedings of the IEEE conference on computer vision and pattern recognition , pages=
Structure-from-motion revisited , author=. Proceedings of the IEEE conference on computer vision and pattern recognition , pages=
-
[11]
IEEE Transactions on robotics , volume=
Past, present, and future of simultaneous localization and mapping: Toward the robust-perception age , author=. IEEE Transactions on robotics , volume=. 2016 , publisher=
2016
-
[12]
Advanced Engineering Informatics , volume=
Enabling human--machine collaboration in infrastructure inspections through mixed reality , author=. Advanced Engineering Informatics , volume=. 2022 , publisher=
2022
-
[13]
Journal of Computing in Civil Engineering , volume=
Automated defect quantification in concrete bridges using robotics and deep learning , author=. Journal of Computing in Civil Engineering , volume=. 2020 , publisher=
2020
-
[14]
Structural Control and Health Monitoring , volume=
Bridge related damage quantification using unmanned aerial vehicle imagery , author=. Structural Control and Health Monitoring , volume=. 2016 , publisher=
2016
-
[15]
Cui, Jiadi and Cao, Junming and Zhao, Fuqiang and He, Zhipeng and Chen, Yifan and Zhong, Yuhui and Xu, Lan and Shi, Yujiao and Zhang, Yingliang and Yu, Jingyi , title =. 2024 , issue_date =. doi:10.1145/3687762 , journal =
-
[16]
arXiv preprint arXiv:2404.06926 , year=
Gaussian-LIC: Photo-realistic LiDAR-Inertial-Camera SLAM with 3D Gaussian Splatting , author=. arXiv preprint arXiv:2404.06926 , year=
-
[17]
arXiv preprint arXiv:2409.16296 , year=
LiDAR-3DGS: LiDAR Reinforced 3D Gaussian Splatting for Multimodal Radiance Field Rendering , author=. arXiv preprint arXiv:2409.16296 , year=
-
[18]
arXiv preprint arXiv:2404.04026 , year=
MM-Gaussian: 3D Gaussian-based Multi-modal Fusion for Localization and Reconstruction in Unbounded Scenes , author=. arXiv preprint arXiv:2404.04026 , year=
-
[19]
IEEE Robotics and Automation Letters , year=
Li-gs: Gaussian splatting with lidar incorporated for accurate large-scale reconstruction , author=. IEEE Robotics and Automation Letters , year=
-
[20]
IEEE Robotics and Automation Letters , year=
Liv-gaussmap: Lidar-inertial-visual fusion for real-time 3d radiance field map rendering , author=. IEEE Robotics and Automation Letters , year=
-
[21]
IEEE Robotics and Automation Letters , year=
LiV-GS: LiDAR-Vision Integration for 3D Gaussian Splatting SLAM in Outdoor Environments , author=. IEEE Robotics and Automation Letters , year=
-
[22]
Proceedings of the fourth Eurographics symposium on Geometry processing , year=
Poisson surface reconstruction , author=. Proceedings of the fourth Eurographics symposium on Geometry processing , year=
-
[23]
Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , pages=
Scaffold-gs: Structured 3d gaussians for view-adaptive rendering , author=. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , pages=
-
[24]
SIGGRAPH 2024 Conference Papers , year =
2D Gaussian Splatting for Geometrically Accurate Radiance Fields , author=. SIGGRAPH 2024 Conference Papers , year =
2024
-
[25]
arXiv preprint arXiv:2312.00206 , year=
Sparsegs: Real-time 360 \ deg \ sparse view synthesis using gaussian splatting , author=. arXiv preprint arXiv:2312.00206 , year=
-
[26]
IEEE transactions on image processing , volume=
Image quality assessment: from error visibility to structural similarity , author=. IEEE transactions on image processing , volume=. 2004 , publisher=
2004
-
[27]
2024 , eprint=
AtomGS: Atomizing Gaussian Splatting for High-Fidelity Radiance Field , author=. 2024 , eprint=
2024
-
[28]
CVPR , year=
SuGaR: Surface-Aligned Gaussian Splatting for Efficient 3D Mesh Reconstruction and High-Quality Mesh Rendering , author=. CVPR , year=
-
[29]
ACM Transactions on Graphics , number =
Kerbl, Bernhard and Meuleman, Andreas and Kopanas, Georgios and Wimmer, Michael and Lanvin, Alexandre and Drettakis, George , title =. ACM Transactions on Graphics , number =. 2024 , url =
2024
-
[30]
arXiv preprint arXiv:1901.02532 , year=
Fast 3D Line Segment Detection From Unorganized Point Cloud , author=. arXiv preprint arXiv:1901.02532 , year=
Pith/arXiv arXiv 1901
-
[31]
Hilti-Oxford Dataset: A Millimeter-Accurate Benchmark for Simultaneous Localization and Mapping , year=
Zhang, Lintong and Helmberger, Michael and Fu, Lanke Frank Tarimo and Wisth, David and Camurri, Marco and Scaramuzza, Davide and Fallon, Maurice , journal=. Hilti-Oxford Dataset: A Millimeter-Accurate Benchmark for Simultaneous Localization and Mapping , year=
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.