A model-free approach to control barrier functions for higher-order systems
Pith reviewed 2026-06-28 05:17 UTC · model grok-4.3
The pith
Control barrier functions can be designed model-free for nonlinear systems of arbitrary relative degree by using funnel control to identify safe inputs.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
We extend the model-free CBF design to nonlinear systems of arbitrary relative degree. We utilize novel techniques from funnel control to characterize a subset of the controls satisfying a CBF condition without requiring a dynamic model or state measurement.
What carries the argument
Novel funnel-control techniques that isolate a non-empty subset of admissible controls meeting the CBF condition for relative degree greater than one.
If this is right
- Safe controls become available for relative-degree-two systems such as robotic manipulators without dynamics knowledge.
- The method applies to general nonlinear systems of any relative degree.
- Modular safety filters can be realized in settings where only partial state information is available.
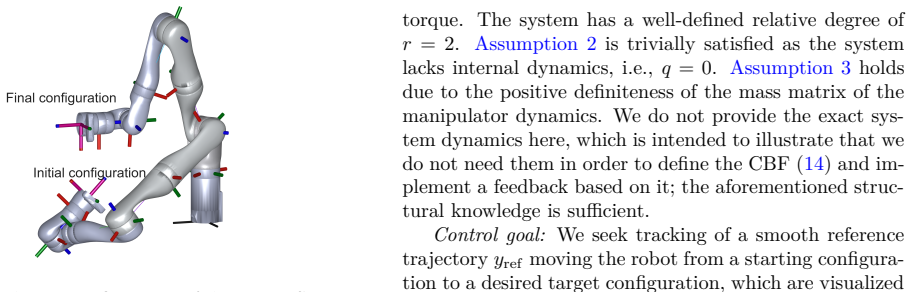
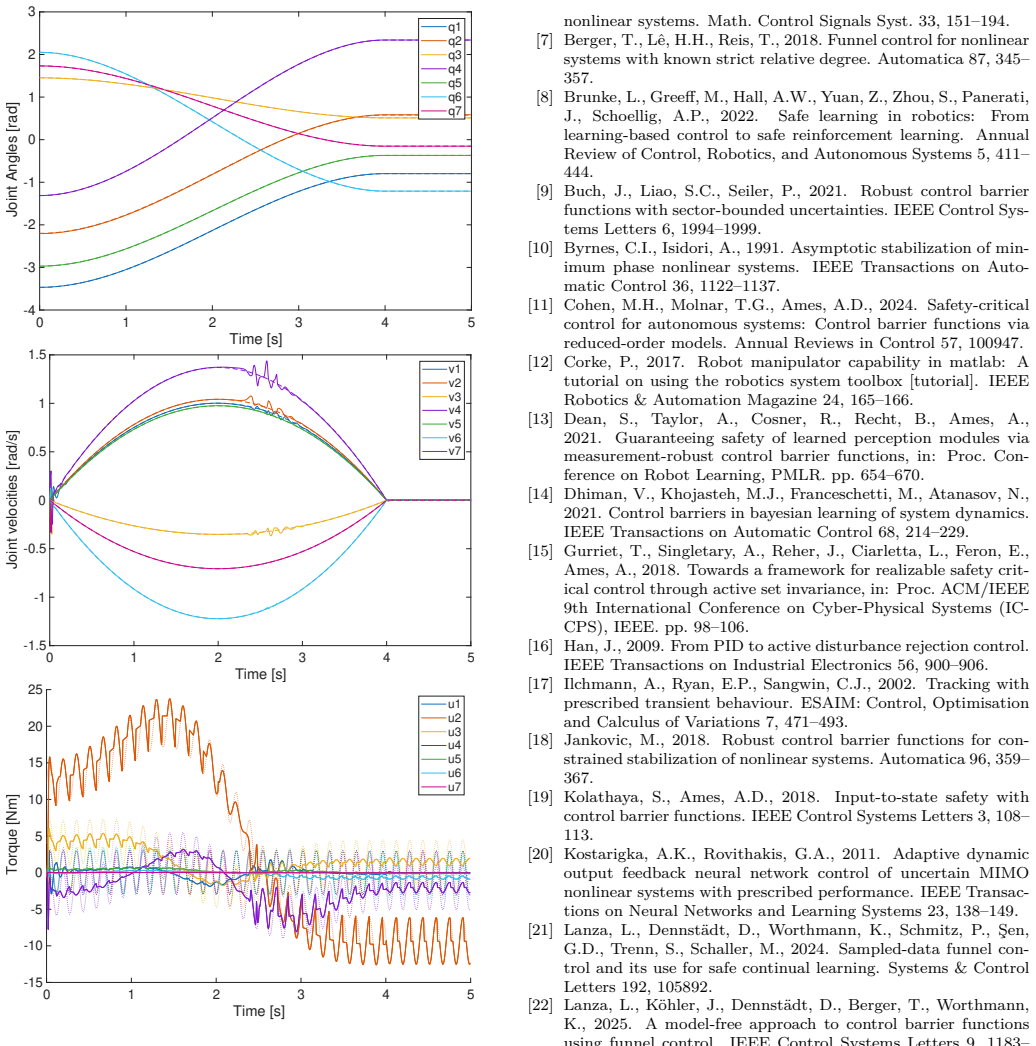
- The approach is demonstrated to function on a seven-degree-of-freedom robot arm.
Where Pith is reading between the lines
- The same funnel-based subset characterization might be combined with other performance-oriented controllers to obtain joint safety and transient guarantees.
- Extension to output-feedback or observer-based settings would be a natural next step for partially observed plants.
- Numerical checks on the size of the admissible control set for increasing relative degree would quantify practical conservatism.
Load-bearing premise
The funnel-control techniques can be combined with the CBF condition to produce a non-empty set of admissible controls for relative degree greater than one without a dynamic model or full state measurement.
What would settle it
Finding a concrete system of relative degree two for which the derived funnel-based condition admits no control input would falsify the claim.
Figures

read the original abstract
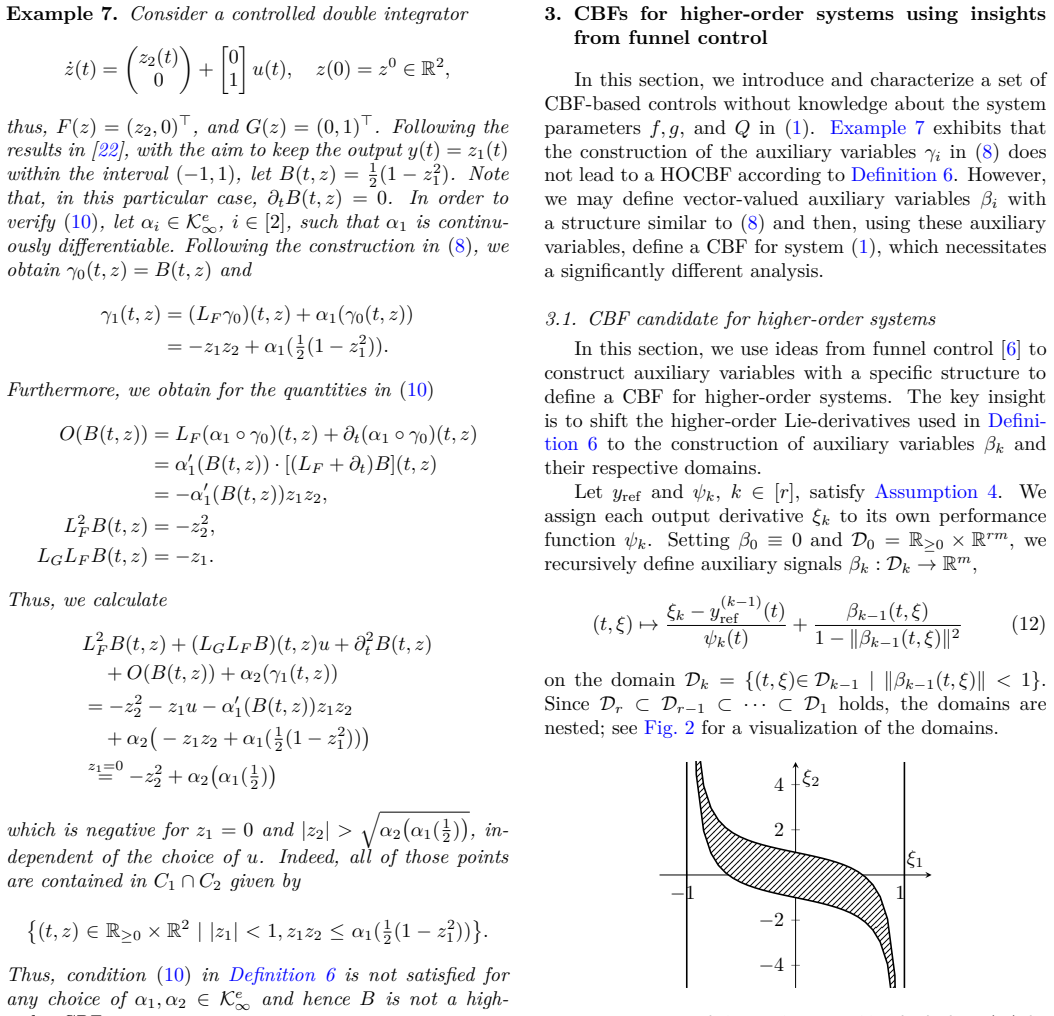
Control barrier functions (CBFs) are a widely applied modular tool to ensure safe operation of nonlinear dynamical control systems. However, for their construction accurate knowledge of the system dynamics is typically needed. This requirement was recently alleviated for relative-degree-one systems using techniques from prescribed performance control (PPC) or funnel control (FC). This article extends the model-free CBF design to nonlinear systems of arbitrary relative degree. Moreover, we show with a simple example that a straightforward extension of existing results for relative-degree-one systems fails. Instead, we utilize novel techniques from funnel control to characterize a subset of the controls satisfying a CBF condition without requiring a dynamic model or state measurement. Finally, we demonstrate the applicability of our results on a seven degrees of freedom robotic manipulator with relative degree two.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript extends model-free CBF design from relative-degree-one systems to nonlinear systems of arbitrary relative degree. It first shows via a simple example that a direct extension of existing PPC/FC-based results fails, then uses novel funnel-control techniques to characterize a subset of admissible controls that satisfy a CBF condition from output measurements alone, without a dynamic model or full state. The approach is validated on a 7DOF robotic manipulator with relative degree two.
Significance. If the new characterization produces a non-empty admissible control set for relative degree >1 while remaining strictly model-free and output-based, the result would be a useful advance for safety-critical control of high-relative-degree systems (e.g., manipulators, vehicles) where accurate dynamics are unavailable. The explicit counter-example to the naive extension and the concrete robotic demonstration are concrete strengths.
major comments (2)
- [§4] §4 (characterization of admissible controls): the derivation that the funnel-control-based subset is non-empty for relative degree r>1 must be shown to avoid any implicit dependence on Lie derivatives of order greater than one or on unmeasured states; the current argument appears to rest on output-only measurements but the non-emptiness guarantee for the general class is not yet load-bearing.
- [§5] §5 (manipulator example): the specific performance functions, the exact form of the CBF inequality enforced, and the quantitative safety margins (e.g., minimum distance to the unsafe set) are not reported; without these it is impossible to verify that the model-free construction actually satisfies the higher-order CBF condition on the hardware.
minor comments (2)
- [§3] Notation for the funnel functions and the admissible-control set should be introduced with a single consistent symbol table to avoid confusion between the relative-degree-one and higher-order cases.
- [Abstract] The abstract states that the direct extension 'fails' but does not indicate the precise failure mode (empty set, loss of model-freeness, or violation of the CBF inequality); a one-sentence clarification would help readers.
Simulated Author's Rebuttal
We thank the referee for the constructive comments and the positive assessment of the manuscript's contributions. We address each major comment below and will incorporate clarifications and additional details in the revised version.
read point-by-point responses
-
Referee: [§4] §4 (characterization of admissible controls): the derivation that the funnel-control-based subset is non-empty for relative degree r>1 must be shown to avoid any implicit dependence on Lie derivatives of order greater than one or on unmeasured states; the current argument appears to rest on output-only measurements but the non-emptiness guarantee for the general class is not yet load-bearing.
Authors: We appreciate this point. The derivation in §4 constructs the admissible control subset exclusively via the output-based funnel error transformation and the associated performance functions; no Lie derivatives of order greater than one or unmeasured states enter the argument. Non-emptiness follows directly from the existence of a funnel controller for relative-degree-r systems that keeps the transformed error within the prescribed bounds, thereby satisfying the CBF condition by construction. To address the concern that this guarantee is not yet sufficiently load-bearing, we will add an explicit remark and a short appendix paragraph restating the output-only nature of the construction and confirming the absence of higher-order derivatives. revision: partial
-
Referee: [§5] §5 (manipulator example): the specific performance functions, the exact form of the CBF inequality enforced, and the quantitative safety margins (e.g., minimum distance to the unsafe set) are not reported; without these it is impossible to verify that the model-free construction actually satisfies the higher-order CBF condition on the hardware.
Authors: We agree that these implementation details are required for full verification. In the revised manuscript we will report the exact performance functions employed for the 7DOF manipulator, the precise CBF inequality that is enforced at each step, and quantitative safety margins including the minimum observed distance to the unsafe set throughout the hardware experiments. revision: yes
Circularity Check
No circularity: model-free CBF extension for higher relative degree relies on external funnel-control techniques
full rationale
The paper's central step is to characterize a non-empty admissible control set for relative-degree >1 systems using novel funnel-control techniques, without model or full state. The abstract explicitly states that a direct extension of the rel-degree-1 case fails and therefore invokes external funnel-control methods to produce the characterization. No equation or claim reduces by construction to a fitted parameter, self-defined quantity, or self-citation chain; the load-bearing novelty is presented as an independent combination of established PPC/FC results with the CBF inequality. The derivation is therefore self-contained against external benchmarks in the funnel-control literature.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Alan, A., Taylor, A.J., He, C.R., Ames, A.D., Orosz, G., 2023. Control barrier functions and input-to-state safety with appli- 8 Time [s] 0 1 2 3 4 5 Joint Angles [rad] -4 -3 -2 -1 0 1 2 3 q1 q2 q3 q4 q5 q6 q7 Time [s] 0 1 2 3 4 5 Joint velocities [rad/s] -1.5 -1 -0.5 0 0.5 1 1.5 v1 v2 v3 v4 v5 v6 v7 Time [s] 0 1 2 3 4 5 Torque [Nm] -15 -10 -5 0 5 10 15 2...
2023
-
[2]
Control barrier functions: Theory and applications, in: Proc
Ames, A.D., Coogan, S., Egerstedt, M., Notomista, G., Sreenath, K., Tabuada, P., 2019. Control barrier functions: Theory and applications, in: Proc. 18th European Control Conf. (ECC), pp. 3420–3431
2019
-
[3]
Control barrier function based quadratic programs for safety critical sys- tems
Ames, A.D., Xu, X., Grizzle, J.W., Tabuada, P., 2016. Control barrier function based quadratic programs for safety critical sys- tems. IEEE Transactions on Automatic Control 62, 3861–3876
2016
-
[4]
Robust adaptive con- trol of feedback linearizable MIMO nonlinear systems with pre- scribed performance
Bechlioulis, C.P., Rovithakis, G.A., 2008. Robust adaptive con- trol of feedback linearizable MIMO nonlinear systems with pre- scribed performance. IEEE Transactions on Automatic Control 53, 2090–2099
2008
-
[5]
A low-complexity global approximation-free control scheme with prescribed per- formance for unknown pure feedback systems
Bechlioulis, C.P., Rovithakis, G.A., 2014. A low-complexity global approximation-free control scheme with prescribed per- formance for unknown pure feedback systems. Automatica 50, 1217–1226
2014
-
[6]
Funnel control of nonlinear systems
Berger, T., Ilchmann, A., Ryan, E.P., 2021. Funnel control of nonlinear systems. Math. Control Signals Syst. 33, 151–194
2021
-
[7]
Funnel control for nonlinear systems with known strict relative degree
Berger, T., Lê, H.H., Reis, T., 2018. Funnel control for nonlinear systems with known strict relative degree. Automatica 87, 345– 357
2018
-
[8]
Safe learning in robotics: From learning-based control to safe reinforcement learning
Brunke, L., Greeff, M., Hall, A.W., Yuan, Z., Zhou, S., Panerati, J., Schoellig, A.P., 2022. Safe learning in robotics: From learning-based control to safe reinforcement learning. Annual Review of Control, Robotics, and Autonomous Systems 5, 411– 444
2022
-
[9]
Robust control barrier functions with sector-bounded uncertainties
Buch, J., Liao, S.C., Seiler, P., 2021. Robust control barrier functions with sector-bounded uncertainties. IEEE Control Sys- tems Letters 6, 1994–1999
2021
-
[10]
Asymptotic stabilization of min- imum phase nonlinear systems
Byrnes, C.I., Isidori, A., 1991. Asymptotic stabilization of min- imum phase nonlinear systems. IEEE Transactions on Auto- matic Control 36, 1122–1137
1991
-
[11]
Safety-critical control for autonomous systems: Control barrier functions via reduced-order models
Cohen, M.H., Molnar, T.G., Ames, A.D., 2024. Safety-critical control for autonomous systems: Control barrier functions via reduced-order models. Annual Reviews in Control 57, 100947
2024
-
[12]
Robot manipulator capability in matlab: A tutorial on using the robotics system toolbox [tutorial]
Corke, P., 2017. Robot manipulator capability in matlab: A tutorial on using the robotics system toolbox [tutorial]. IEEE Robotics & Automation Magazine 24, 165–166
2017
-
[13]
Dean, S., Taylor, A., Cosner, R., Recht, B., Ames, A.,
-
[14]
Con- ference on Robot Learning, PMLR
Guaranteeing safety of learned perception modules via measurement-robust control barrier functions, in: Proc. Con- ference on Robot Learning, PMLR. pp. 654–670
-
[15]
Dhiman, V., Khojasteh, M.J., Franceschetti, M., Atanasov, N.,
-
[16]
IEEE Transactions on Automatic Control 68, 214–229
Control barriers in bayesian learning of system dynamics. IEEE Transactions on Automatic Control 68, 214–229
-
[17]
Towards a framework for realizable safety crit- ical control through active set invariance, in: Proc
Gurriet, T., Singletary, A., Reher, J., Ciarletta, L., Feron, E., Ames, A., 2018. Towards a framework for realizable safety crit- ical control through active set invariance, in: Proc. ACM/IEEE 9th International Conference on Cyber-Physical Systems (IC- CPS), IEEE. pp. 98–106
2018
-
[18]
From PID to active disturbance rejection control
Han, J., 2009. From PID to active disturbance rejection control. IEEE Transactions on Industrial Electronics 56, 900–906
2009
-
[19]
Tracking with prescribed transient behaviour
Ilchmann, A., Ryan, E.P., Sangwin, C.J., 2002. Tracking with prescribed transient behaviour. ESAIM: Control, Optimisation and Calculus of Variations 7, 471–493
2002
-
[20]
Robust control barrier functions for con- strained stabilization of nonlinear systems
Jankovic, M., 2018. Robust control barrier functions for con- strained stabilization of nonlinear systems. Automatica 96, 359– 367
2018
-
[21]
Input-to-state safety with control barrier functions
Kolathaya, S., Ames, A.D., 2018. Input-to-state safety with control barrier functions. IEEE Control Systems Letters 3, 108– 113
2018
-
[22]
Adaptive dynamic output feedback neural network control of uncertain MIMO nonlinear systems with prescribed performance
Kostarigka, A.K., Rovithakis, G.A., 2011. Adaptive dynamic output feedback neural network control of uncertain MIMO nonlinear systems with prescribed performance. IEEE Transac- tions on Neural Networks and Learning Systems 23, 138–149
2011
-
[23]
Sampled-data funnel con- trol and its use for safe continual learning
Lanza, L., Dennstädt, D., Worthmann, K., Schmitz, P., Şen, G.D., Trenn, S., Schaller, M., 2024. Sampled-data funnel con- trol and its use for safe continual learning. Systems & Control Letters 192, 105892
2024
-
[24]
A model-free approach to control barrier functions using funnel control
Lanza, L., Köhler, J., Dennstädt, D., Berger, T., Worthmann, K., 2025. A model-free approach to control barrier functions using funnel control. IEEE Control Systems Letters 9, 1183–
2025
-
[25]
doi: 10.1109/LCSYS.2025.3581519
-
[26]
Model-free safety-critical control for robotic systems
Molnar, T.G., Cosner, R.K., Singletary, A.W., Ubellacker, W., Ames, A.D., 2021. Model-free safety-critical control for robotic systems. IEEE Robotics and Automation Letters 7, 944–951
2021
-
[27]
On the equivalence between prescribed performance control and control barrier functions, in: Proc
Namerikawa, R., Wiltz, A., Mehdifar, F., Namerikawa, T., Di- marogonas, D.V., 2024. On the equivalence between prescribed performance control and control barrier functions, in: Proc. American Control Conference (ACC), pp. 2458–2463
2024
-
[28]
Partial feedback linearization of underac- tuated mechanical systems, in: Proc
Spong, M.W., 1994. Partial feedback linearization of underac- tuated mechanical systems, in: Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 94), pp. 314–321
1994
-
[29]
Reinforcement learning: An introduction
Sutton, R.S., Barto, A.G., et al., 1998. Reinforcement learning: An introduction. volume 1. MIT press Cambridge
1998
-
[30]
Learning for safety-critical control with control barrier functions
Taylor, A., Singletary, A., Yue, Y., Ames, A., 2020. Learning for safety-critical control with control barrier functions. PMLR (2nd Conf. Learning for Dynamics and Control) 120, 708–717
2020
-
[31]
Funnel control for uncertain nonlinear systems via zeroing control barrier functions
Verginis, C.K., 2022. Funnel control for uncertain nonlinear systems via zeroing control barrier functions. IEEE Control Systems Letters 7, 853–858
2022
-
[32]
Data-driven safety filters: Hamilton-Jacobi reachability, control barrier functions, and predictive methods for uncertain systems
Wabersich, K.P., Taylor, A.J., Choi, J.J., Sreenath, K., Tomlin, C.J., Ames, A.D., Zeilinger, M.N., 2023. Data-driven safety filters: Hamilton-Jacobi reachability, control barrier functions, and predictive methods for uncertain systems. IEEE Control 9 Systems Magazine 43, 137–177
2023
-
[33]
Constructive safety using con- trol barrier functions
Wieland, P., Allgöwer, F., 2007. Constructive safety using con- trol barrier functions. IF AC Proceedings Volumes 40, 462–467
2007
-
[34]
A neural signed configuration distance function for path planning of picking manipulators
Wullt, B., Norrlöf, M., Mattsson, P., Schön, T.B., 2025. Prob- abilistic bubble roadmap. arXiv preprint arXiv:2502.16205
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[35]
High-order control barrier functions
Xiao, W., Belta, C., 2021. High-order control barrier functions. IEEE Transactions on Automatic Control 67, 3655–3662
2021
-
[36]
Constrained control of input–output linearizable systems using control sharing barrier functions
Xu, X., 2018. Constrained control of input–output linearizable systems using control sharing barrier functions. Automatica 87, 195–201. Appendix Proof of Lemma 13 . We adapt the proof of [ 21, Lem. 2.2] to the current setting. For i 2 [r 1], we define σi := inf s≥ˆt k ψi+1(s) ψi(s) k. Setting δ0 := 0, ¯κ0 := 0 and uti- lizing the the short hand notation χ(...
2018
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.