TSA: Temporal Slot Activation for Persistent Object-Centric Video Representation
Pith reviewed 2026-06-27 09:39 UTC · model grok-4.3
The pith
Temporal Slot Activation learns a per-slot activation score to gate updates and suppress decoder attention when objects are absent or occluded.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
TSA learns a shared latent control variable alpha_{k,t} that simultaneously performs activation-gated state updating (to prevent update-induced drift) and supplies an activation-dependent additive bias on decoder attention logits (to prevent reconstruction-driven interference), with the activation predictor conditioned on a Temporal Context Encoder memory to improve decisions under occlusion.
What carries the argument
Temporal Slot Activation (TSA), a learned per-slot per-frame scalar alpha in (0,1) that jointly controls gated recurrent updating and biased decoder attention.
If this is right
- Slots maintain identity across frames of absence without overwriting their internal state.
- Inactive slots stop competing for decoder attention, reducing spurious reconstruction of background or other objects.
- Temporal consistency metrics such as IDF1 and HOTA improve most on sequences with long occlusions.
- The same activation variable can be reused for both state preservation and attention modulation without extra supervision.
Where Pith is reading between the lines
- The activation signal could be inspected post-training as an emergent visibility predictor for downstream tasks.
- Similar gating could be added to non-slot architectures that maintain persistent entity states over time.
- If activation decisions remain accurate under heavier domain shift, the method may transfer to real-world surveillance or robotics footage without retraining the visibility logic.
Load-bearing premise
The network can discover reliable activation decisions from reconstruction and temporal context alone, without any direct visibility or occlusion labels.
What would settle it
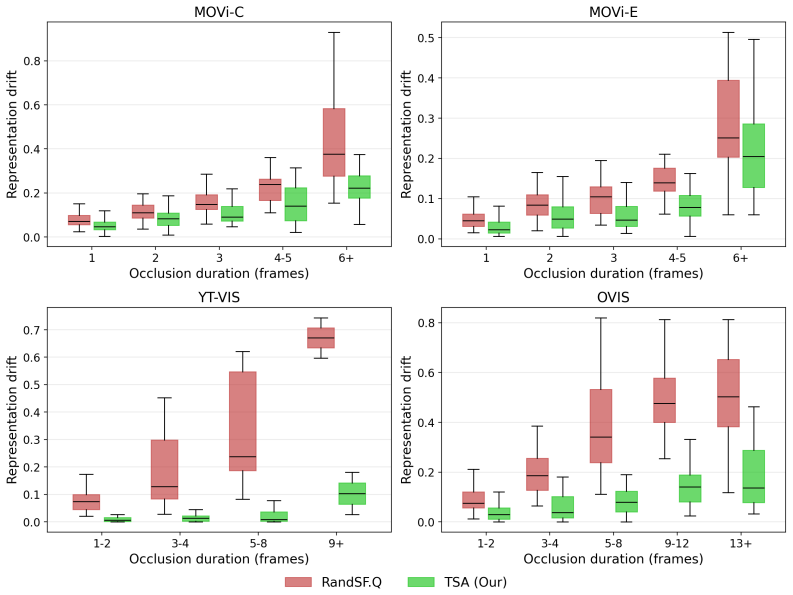
On a video where an object disappears for many frames and reappears unchanged, measure whether the corresponding slot's representation and decoder attention remain stable rather than drifting to explain other visible content.
Figures


read the original abstract
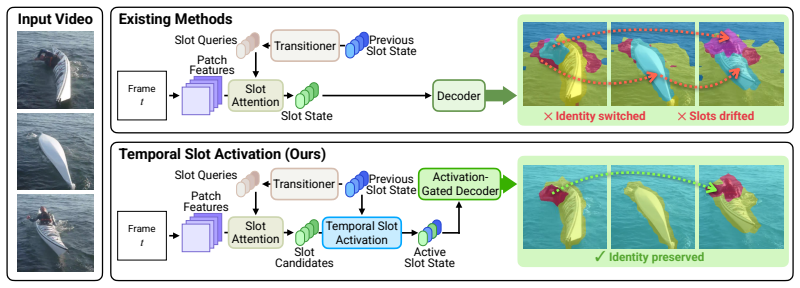
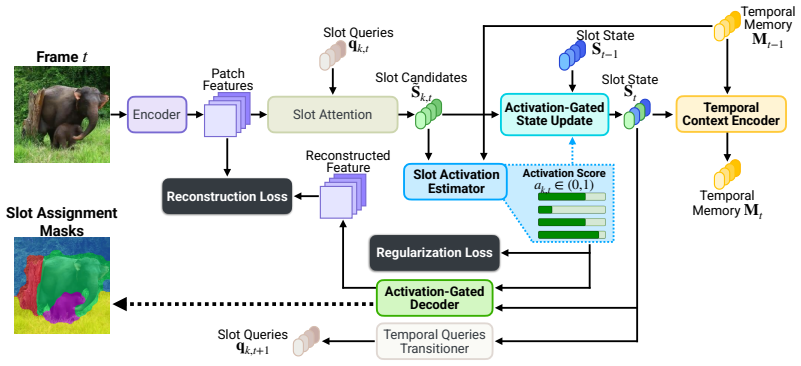
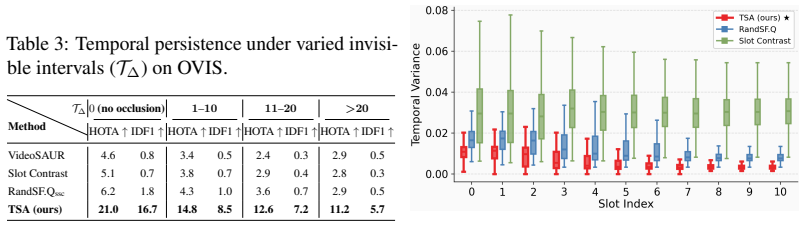
Unsupervised video object-centric learning aims to decompose dynamic scenes into temporally persistent entity representations. Existing recurrent video slot-attention methods propagate a fixed set of slots across frames, but typically assume unconditional slot propagation: every slot is updated and decoded at every frame, regardless of whether its corresponding object is visible. We show that this design violates a basic lifecycle requirement for persistent slots: when an object is absent or fully occluded, its slot should preserve its previous state and avoid explaining unrelated visible content. Instead, unconditional propagation creates two failure pathways: update-induced state drift, where current-frame evidence overwrites the absent object's representation, and decoder-induced reconstruction interference, where the inactive slot remains coupled to reconstruction through decoder attention. We propose Temporal Slot Activation (TSA), a mechanism that learns a per-slot, per-frame activation score $\alpha_{k,t} \in (0, 1)$ without visibility supervision. TSA uses this activation as a shared latent control variable for slot lifecycle modeling. When a slot is inactive, TSA anchors its state to the previous slot via activation-gated updating and suppresses its decoder participation through an activation-dependent additive bias on attention logits before softmax normalization. This jointly reduces state drift and reconstruction-driven interference. To improve decisions under partial occlusion and gradual reappearance, TSA further conditions activation prediction on a per-slot temporal memory produced by a Temporal Context Encoder. We evaluate TSA on MOVi-C/E, YT-VIS, and OVIS benchmarks using both standard and tracking-based metrics (FG-ARI, mBO, IDF1, HOTA). TSA consistently improves object decomposition and temporal identity preservation, with large gains on long, heavily occluded videos.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes Temporal Slot Activation (TSA) for unsupervised video object-centric learning. Existing recurrent slot-attention methods propagate slots unconditionally across frames, leading to state drift and reconstruction interference when objects are absent or occluded. TSA learns a per-slot, per-frame activation score α_{k,t} ∈ (0,1) without visibility supervision, conditioned on a Temporal Context Encoder. This score gates slot state updates and adds an activation-dependent bias to decoder attention logits, aiming to preserve inactive slots and reduce interference. The method is evaluated on MOVi-C/E, YT-VIS, and OVIS using FG-ARI, mBO, IDF1, and HOTA, with claims of consistent improvements especially on long occluded videos.
Significance. If the unsupervised activation scores reliably proxy object presence without labels and the temporal encoder disambiguates partial occlusions, TSA would address a core limitation in persistent slot representations, enabling better lifecycle modeling in dynamic scenes. This could strengthen object-centric video models for tracking and decomposition tasks where unconditional propagation fails.
major comments (3)
- [Abstract and §3] Abstract and §3 (TSA mechanism): the central claim that α_{k,t} functions as a reliable visibility proxy rests on the reconstruction objective alone; no auxiliary loss, derivation, or analysis is provided to rule out degenerate solutions (e.g., α converging to ~0.5 or spurious correlations) under occlusion, as highlighted by the weakest assumption.
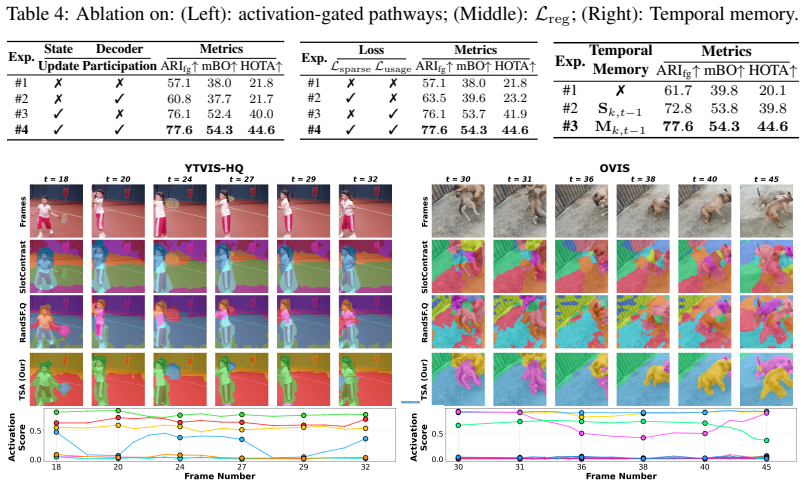
- [§4] §4 (Experiments): the abstract and results claim large gains on occluded videos, but no ablation isolates the contribution of the activation-gated update, attention bias, or Temporal Context Encoder versus baseline slot propagation; without these, the load-bearing role of the lifecycle modeling cannot be verified.
- [§3.2] §3.2 (activation prediction): the Temporal Context Encoder is asserted to improve decisions under gradual reappearance, yet no capacity analysis or failure-case evaluation demonstrates that its memory suffices to disambiguate partial visibility without direct supervision.
minor comments (2)
- [§3] Notation for α_{k,t} and the gated update equation should be introduced with explicit definitions before use in the method section to improve readability.
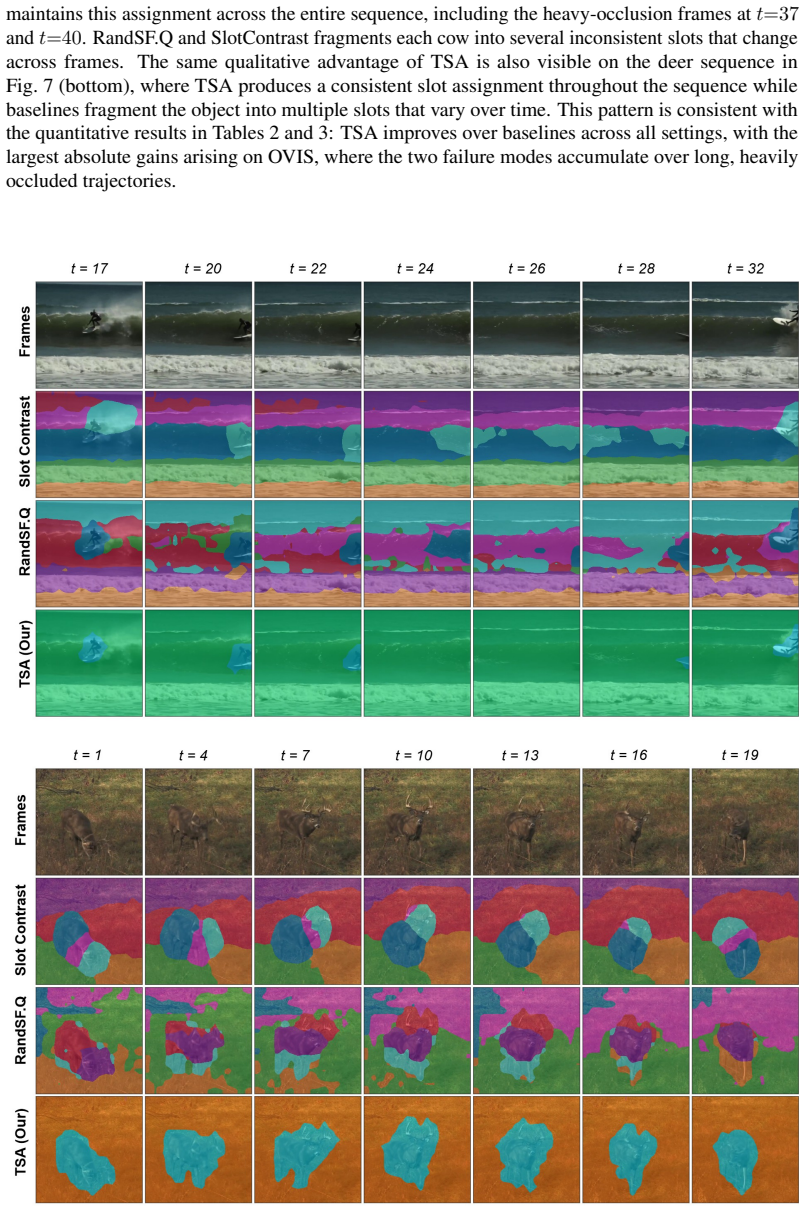
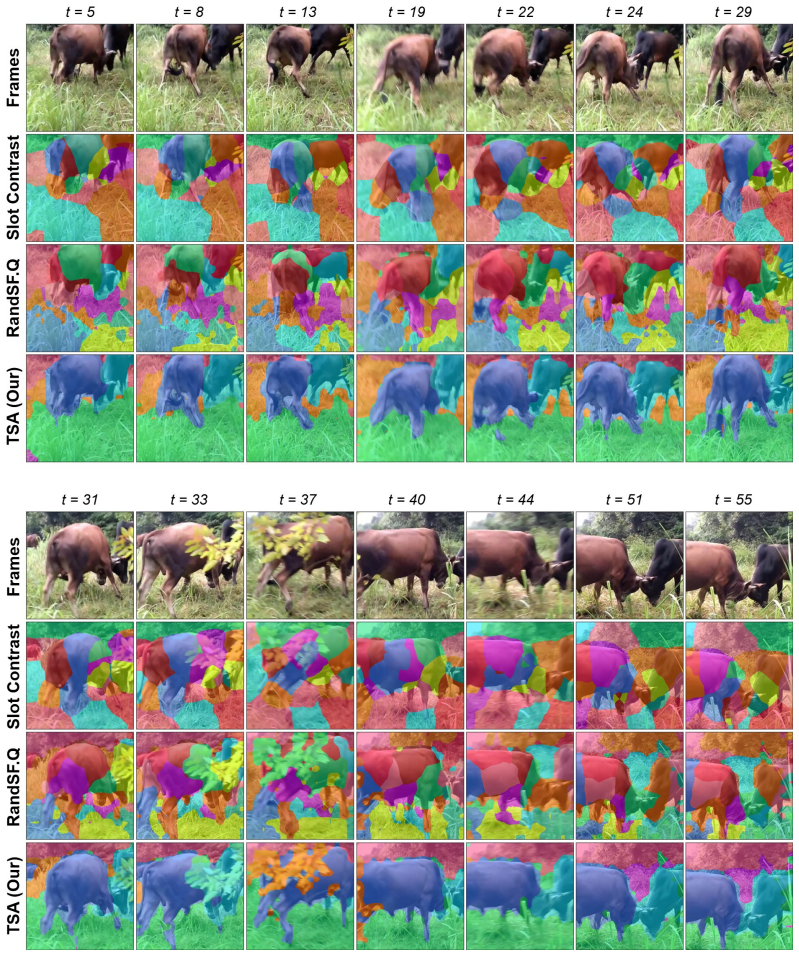
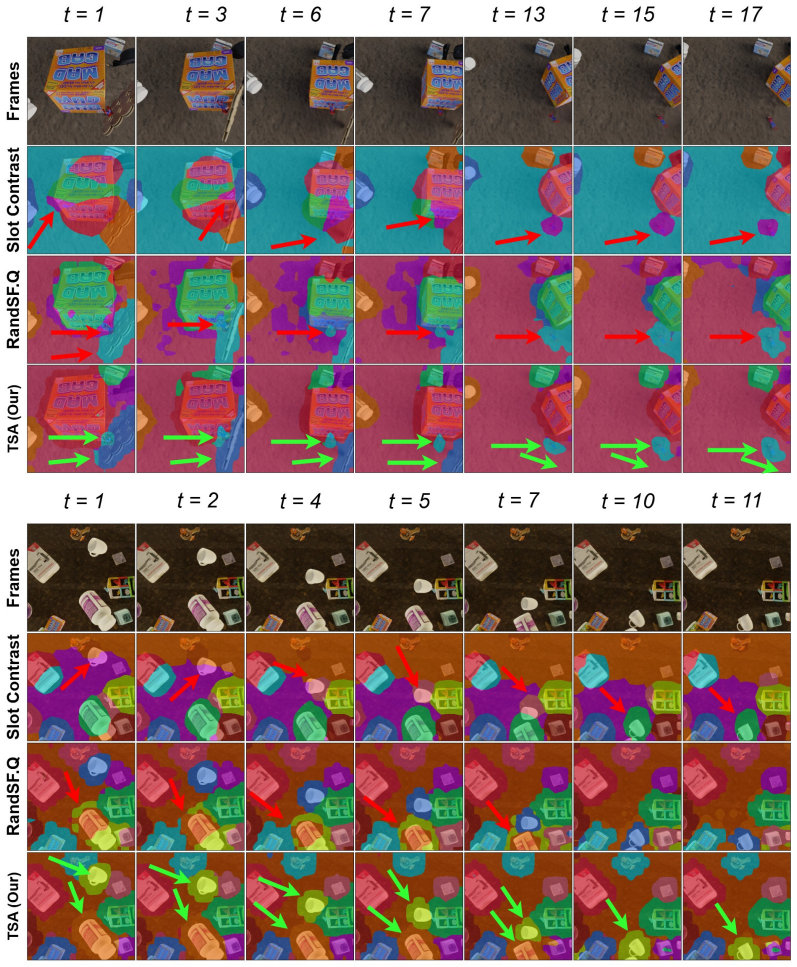
- [Figures] Figure captions for qualitative results should explicitly label which slots are active/inactive to illustrate the claimed interference reduction.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address each major comment below and outline revisions to strengthen the presentation of TSA.
read point-by-point responses
-
Referee: [Abstract and §3] Abstract and §3 (TSA mechanism): the central claim that α_{k,t} functions as a reliable visibility proxy rests on the reconstruction objective alone; no auxiliary loss, derivation, or analysis is provided to rule out degenerate solutions (e.g., α converging to ~0.5 or spurious correlations) under occlusion, as highlighted by the weakest assumption.
Authors: We agree that the current manuscript relies on the reconstruction objective to encourage α_{k,t} to serve as a visibility proxy without an auxiliary loss or formal derivation. The design is motivated by the need to mitigate state drift and decoder interference, and empirical results on occluded videos support its effectiveness. To address concerns about potential degenerate solutions, we will add analysis in the revision, including distributions of learned α values across visibility conditions and comparisons against constant or random activation baselines. revision: yes
-
Referee: [§4] §4 (Experiments): the abstract and results claim large gains on occluded videos, but no ablation isolates the contribution of the activation-gated update, attention bias, or Temporal Context Encoder versus baseline slot propagation; without these, the load-bearing role of the lifecycle modeling cannot be verified.
Authors: We acknowledge that the experiments section does not include component ablations isolating the gated update, attention bias, and Temporal Context Encoder. While the overall gains on long occluded sequences are consistent with the proposed lifecycle modeling, we agree that targeted ablations are needed to verify each element's contribution. We will incorporate these ablations in the revised manuscript, reporting results for variants that disable individual components. revision: yes
-
Referee: [§3.2] §3.2 (activation prediction): the Temporal Context Encoder is asserted to improve decisions under gradual reappearance, yet no capacity analysis or failure-case evaluation demonstrates that its memory suffices to disambiguate partial visibility without direct supervision.
Authors: The Temporal Context Encoder is introduced to supply per-slot temporal context for handling partial occlusions and reappearances. While performance improvements on OVIS and YT-VIS support its utility, we agree that explicit capacity analysis and failure-case studies are absent. We will add such evaluations in the revision, including ablation on encoder memory size and qualitative examination of activation decisions during gradual visibility changes. revision: yes
Circularity Check
No significant circularity in TSA derivation chain
full rationale
The paper defines TSA as a new architectural component that learns α_{k,t} via end-to-end optimization on reconstruction and tracking objectives, then applies it to gated state updates and attention logit bias. This is presented as an empirical design choice addressing unconditional propagation failures, with no equations or claims reducing α or the claimed benefits to a fitted parameter renamed as prediction, a self-cited uniqueness theorem, or any input quantity by construction. All load-bearing elements (Temporal Context Encoder, activation-gated update, additive bias) are introduced as novel and evaluated externally on MOVi-C/E, YT-VIS, and OVIS. The derivation remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Core knowledge.Developmental Science, 10(1):89–96, 2007
Elizabeth S Spelke and Katherine D Kinzler. Core knowledge.Developmental Science, 10(1):89–96, 2007
2007
-
[2]
object files
Daniel Kahneman, Anne Treisman, and Brian J Gibbs. Reviewing the evidence on “object files”: The objects of attention.Cognitive Psychology, 24(2):175–219, 1992
1992
-
[3]
MIT Press, 1982
David Marr.Vision: A computational investigation into the human representation and processing of visual information. MIT Press, 1982
1982
-
[4]
Multi-object representation learning with iterative variational inference
Klaus Greff, Raphaël Lopez Kaufman, Rishabh Kabra, Nick Watters, Christopher Burgess, Daniel Zoran, Loic Matthey, Matthew Botvinick, and Alexander Lerchner. Multi-object representation learning with iterative variational inference. InInternational Conference on Machine Learning, pages 2424–2433. PMLR, 2019
2019
-
[5]
Attend, infer, repeat: Fast scene understanding with generative models.Advances in Neural Information Processing Systems, 29, 2016
SM Eslami, Nicolas Heess, Theophane Weber, Yuval Tassa, David Szepesvari, Geoffrey E Hinton, et al. Attend, infer, repeat: Fast scene understanding with generative models.Advances in Neural Information Processing Systems, 29, 2016
2016
-
[6]
Monet: Unsupervised scene decomposition and representation.arXiv preprint arXiv:1901.11390, 2019
Christopher P Burgess, Loic Matthey, Nicholas Watters, Rishabh Kabra, Irina Higgins, Matt Botvinick, and Alexander Lerchner. Monet: Unsupervised scene decomposition and representation.arXiv preprint arXiv:1901.11390, 2019
Pith/arXiv arXiv 1901
-
[7]
GENESIS: Generative scene inference and sampling with object-centric latent representations
Martin Engelcke, Adam R Kosiorek, Oiwi Parker Jones, and Ingmar Posner. GENESIS: Generative scene inference and sampling with object-centric latent representations. InInternational Conference on Learning Representations, 2020
2020
-
[8]
SPACE: Unsupervised object-oriented scene representation via spatial attention and decomposition
Zhixuan Lin, Yi-Fu Wu, Skand Vishwanath Peri, Weihao Sun, Gautam Singh, Fei Deng, Jindong Jiang, and Sungjin Ahn. SPACE: Unsupervised object-oriented scene representation via spatial attention and decomposition. InInternational Conference on Learning Representations, 2020
2020
-
[9]
Object-centric learning with slot attention
Francesco Locatello, Dirk Weissenborn, Thomas Unterthiner, Aravindh Mahendran, Georg Heigold, Jakob Uszkoreit, Alexey Dosovitskiy, and Thomas Kipf. Object-centric learning with slot attention. Advances in Neural Information Processing Systems, 33:11525–11538, 2020
2020
-
[10]
Relational inductive biases, deep learning, and graph networks.arXiv preprint arXiv:1806.01261, 2018
Peter W Battaglia, Jessica B Hamrick, Victor Bapst, Alvaro Sanchez-Gonzalez, Vinicius Zambaldi, Mateusz Malinowski, Andrea Tacchetti, David Raposo, Adam Santoro, Ryan Faulkner, et al. Relational inductive biases, deep learning, and graph networks.arXiv preprint arXiv:1806.01261, 2018
Pith/arXiv arXiv 2018
-
[11]
SlotFormer: Unsupervised visual dynamics simulation with object-centric models
Ziyi Wu, Nikita Dvornik, Klaus Greff, Thomas Kipf, and Animesh Garg. SlotFormer: Unsupervised visual dynamics simulation with object-centric models. InInternational Conference on Learning Representations, 2023
2023
-
[12]
SlotDiffusion: Object-centric generative modeling with diffusion models
Ziyi Wu, Jingyu Hu, Wuyue Lu, Igor Gilitschenski, and Animesh Garg. SlotDiffusion: Object-centric generative modeling with diffusion models. InAdvances in Neural Information Processing Systems, 2023
2023
-
[13]
SPOT: Self- training with patch-order permutation for object-centric learning with autoregressive transformers
Ioannis Kakogeorgiou, Spyros Gidaris, Konstantinos Karantzalos, and Nikos Komodakis. SPOT: Self- training with patch-order permutation for object-centric learning with autoregressive transformers. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 22776– 22786, 2024
2024
-
[14]
Bridging the gap to real-world object-centric learning
Maximilian Seitzer, Max Horn, Andrii Zadaianchuk, Dominik Zietlow, Tianjun Xiao, Carl-Johann Simon- Gabriel, Tong He, Zheng Zhang, Bernhard Schölkopf, Thomas Brox, and Francesco Locatello. Bridging the gap to real-world object-centric learning. InInternational Conference on Learning Representations, 2023
2023
-
[15]
Conditional object-centric learning from video
Thomas Kipf, Gamaleldin F Elsayed, Aravindh Mahendran, Austin Stone, Sara Sabour, Georg Heigold, Rico Jonschkowski, Alexey Dosovitskiy, and Klaus Greff. Conditional object-centric learning from video. InInternational Conference on Learning Representations, 2022
2022
-
[16]
SA Vi++: Towards end-to-end object-centric learning from real-world videos
Gamaleldin F Elsayed, Aravindh Mahendran, Sjoerd van Steenkiste, Klaus Greff, Michael C Mozer, and Thomas Kipf. SA Vi++: Towards end-to-end object-centric learning from real-world videos. InAdvances in Neural Information Processing Systems, 2022. 10
2022
-
[17]
Object-centric learning for real-world videos by predicting temporal feature similarities
Andrii Zadaianchuk, Maximilian Seitzer, and Georg Martius. Object-centric learning for real-world videos by predicting temporal feature similarities. InAdvances in Neural Information Processing Systems, 2023
2023
-
[18]
Temporally consistent object-centric learning by contrasting slots
Aram Manasyan, Maximilian Seitzer, Filip Radovic, Georg Martius, and Andrii Zadaianchuk. Temporally consistent object-centric learning by contrasting slots. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2025
2025
-
[19]
RandSF.Q: Randomized future-conditioned slot forecasting for video object-centric learning
Zixu Zhao et al. RandSF.Q: Randomized future-conditioned slot forecasting for video object-centric learning. InProceedings of the AAAI Conference on Artificial Intelligence, 2025
2025
-
[20]
Kubric: A scalable dataset generator
Klaus Greff, Francois Belletti, Lucas Beyer, Carl Doersch, Yilun Du, Daniel Duckworth, David J Fleet, Dan Gnanapragasam, Florian Golemo, Charles Herrmann, et al. Kubric: A scalable dataset generator. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 3749–3763, 2022
2022
-
[21]
Video instance segmentation
Linjie Yang, Yuchen Fan, and Ning Xu. Video instance segmentation. InProceedings of the IEEE/CVF International Conference on Computer Vision, pages 5188–5197, 2019
2019
-
[22]
Occluded video instance segmentation: A benchmark.International Journal of Computer Vision, 130(8):2022–2039, 2022
Jiyang Qi, Yan Gao, Yao Hu, Xinggang Wang, Xiaoyu Liu, Xiang Bai, Serge Belongie, Alan Yuille, Philip Torr, and Song Bai. Occluded video instance segmentation: A benchmark.International Journal of Computer Vision, 130(8):2022–2039, 2022
2022
-
[23]
HOTA: A higher order metric for evaluating multi-object tracking.International Journal of Computer Vision, 129(2):548–578, 2021
Jonathon Luiten, Aljosa Osˇep, Patrick Dendorfer, Philip Torr, Andreas Geiger, Laura Leal-Taixé, and Bastian Leibe. HOTA: A higher order metric for evaluating multi-object tracking.International Journal of Computer Vision, 129(2):548–578, 2021
2021
-
[24]
Performance measures and a data set for multi-target, multi-camera tracking
Ergys Ristani, Francesco Solera, Roger Zou, Rita Cucchiara, and Carlo Tomasi. Performance measures and a data set for multi-target, multi-camera tracking. InEuropean Conference on Computer Vision Workshops, pages 17–35. Springer, 2016
2016
-
[25]
DINOv2: Learning robust visual features without supervision.Transactions on Machine Learning Research, 2023
Maxime Oquab, Timée Darcet, Théo Mélas-Kyriazi, Mathilde Caron, Mathieu Aubry, Ishan Misra, Armand Joulin, Julien Mairal, Matthieu Cord, and Patrick Bourdoukan. DINOv2: Learning robust visual features without supervision.Transactions on Machine Learning Research, 2023
2023
-
[26]
Bridging the gap to real-world object-centric learning.arXiv preprint arXiv:2209.14860, 2022
Maximilian Seitzer, Max Horn, Andrii Zadaianchuk, Dominik Zietlow, Tianjun Xiao, Carl-Johann Simon- Gabriel, Tong He, Zheng Zhang, Bernhard Schölkopf, Thomas Brox, et al. Bridging the gap to real-world object-centric learning.arXiv preprint arXiv:2209.14860, 2022
arXiv 2022
-
[27]
Object-centric slot diffusion
Jindong Jiang, Fei Deng, Gautam Singh, and Sungjin Ahn. Object-centric slot diffusion. InAdvances in Neural Information Processing Systems, volume 36, pages 8563–8601, 2023
2023
-
[28]
Adaptive slot attention: Object discovery with dynamic slot number
Ke Fan, Zechen Bai, Tianjun Xiao, Tong He, Max Horn, Yanwei Fu, Francesco Locatello, and Zheng Zhang. Adaptive slot attention: Object discovery with dynamic slot number. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 23062–23071, 2024
2024
-
[29]
Yanbo Liu et al. MetaSlot: Break through the fixed number of slots in object-centric learning.arXiv preprint arXiv:2505.20772, 2025
arXiv 2025
-
[30]
Simple unsupervised object-centric learning for complex and naturalistic videos
Gautam Singh, Yi-Fu Wu, and Sungjin Ahn. Simple unsupervised object-centric learning for complex and naturalistic videos. InAdvances in Neural Information Processing Systems, 2022
2022
-
[31]
Self-supervised object-centric learning for videos
Görkay Aydemir, Weidi Xie, and Fatma Guney. Self-supervised object-centric learning for videos. In Advances in Neural Information Processing Systems, 2023
2023
-
[32]
Adam: A method for stochastic optimization
Diederik P Kingma and Jimmy Ba. Adam: A method for stochastic optimization. InInternational Conference on Learning Representations, 2015. 11 Appendix Table of Contents A Dataset Details 13 B Evaluation Metrics 13 C Implementation Details 14 D Additional Analysis and Downstream Task Evaluation 14 D.1 Representation Drift Across Occlusion Intervals . . . . ...
2015
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.