Analyzing Training-Free Corruption Detection for Object Detection Datasets
Pith reviewed 2026-06-27 13:45 UTC · model grok-4.3
The pith
Feature-space distances reliably flag semantic label errors in object detection datasets but leave positional errors hard to detect.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
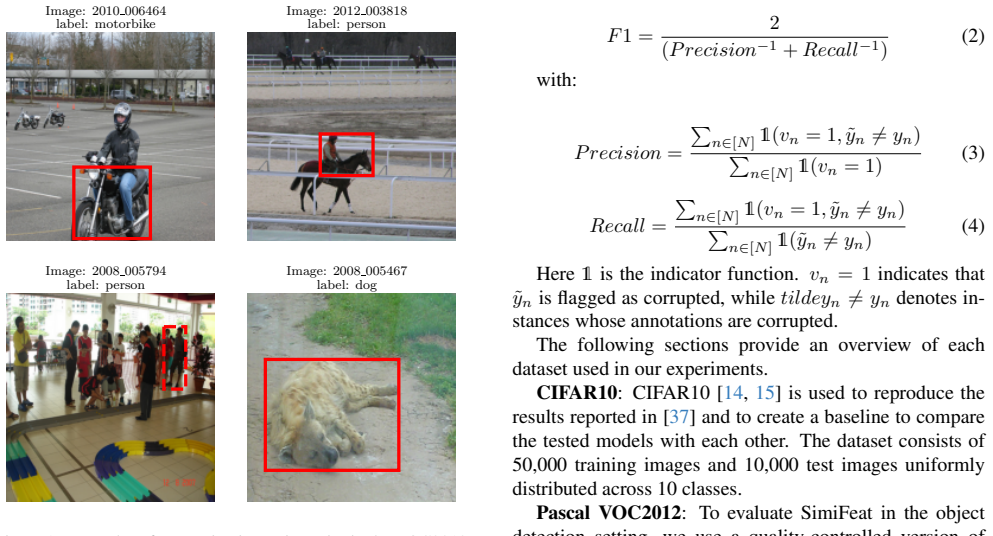
By adapting an existing feature-space method, we show that such approaches reliably expose semantic mislabel, while positional errors remain difficult to detect. We evaluate this behavior across multiple pretrained embedding models, synthetic noise types (symmetric, asymmetric, and positional), and real-world annotation errors using VOC2012 and KITTI.
What carries the argument
Distances computed in the feature space of a pretrained embedding model applied to image crops of detected objects.
If this is right
- Semantic mislabels can be surfaced without training a dedicated detector.
- Positional annotation errors require separate detection strategies.
- The separation pattern is stable across the embedding models examined.
- Both synthetic noise and real annotation mistakes in VOC2012 and KITTI exhibit the same split in detectability.
Where Pith is reading between the lines
- Dataset pipelines could run embedding checks first to triage label errors before investing in positional review.
- Combining the feature-space filter with geometric heuristics for box placement would address the remaining error class.
- The observed independence from model choice hints that the approach may transfer to other detection datasets without retuning.
- Large-scale annotation projects could insert this step to lower the fraction of annotations needing human inspection.
Load-bearing premise
Distances in pretrained embedding space separate semantic annotation errors from correct ones while failing to separate positional errors, and this separation does not depend on the choice of embedding model or dataset.
What would settle it
A single pretrained embedding model paired with one of the tested datasets in which feature distances separate positional errors at least as well as semantic errors, or fail to separate semantic errors at all.
Figures




read the original abstract
Annotation errors are widespread in computer vision datasets and can significantly degrade the performance of systems trained on them, particularly in complex tasks such as object detection. Several approaches exist to identify annotation errors, including training-free feature-space methods which provide a fast and interpretable way to analyze annotations. However, the behavior on object detection annotations, which include semantic and spatial information, remains largely unexplored. In this work we analyze the applicability of feature-space-based approaches for detecting annotation errors in object detection datasets. By adapting an existing feature-space method, we show that such approaches reliably expose semantic mislabel, while positional errors remain difficult to detect. We evaluate this behavior across multiple pretrained embedding models, synthetic noise types (symmetric, asymmetric, and positional), and real-world annotation errors using VOC2012 and KITTI. All code and real-world corruptions are publicly available at the following repository: https://github.com/ ChristianSieberichs/BoundingBox\_corruption\_detection
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript adapts an existing training-free feature-space method to analyze annotation errors in object detection datasets. It claims that such methods reliably detect semantic mislabels while positional errors remain difficult to detect. The evaluation covers multiple pretrained embedding models, synthetic noise types (symmetric, asymmetric, positional), and real-world errors on VOC2012 and KITTI, with code and real-world corruptions released publicly.
Significance. If the empirical findings hold, the work clarifies the differential behavior of embedding-space distances for semantic versus positional annotation errors in object detection, with consistency across models and datasets strengthening the result. The public release of code and corruptions supports reproducibility and is a clear strength.
Simulated Author's Rebuttal
We thank the referee for their positive assessment of the manuscript and for recommending acceptance. We appreciate the recognition of the empirical findings on semantic versus positional errors, the consistency across models and datasets, and the value of the public code and corruption release.
Circularity Check
No significant circularity identified
full rationale
The paper is an empirical analysis that adapts an existing feature-space method and evaluates its behavior on object detection annotations across multiple pretrained embedding models, three synthetic noise types, and real-world errors on VOC2012 and KITTI. No derivations, fitted parameters presented as predictions, or load-bearing self-citation chains appear in the described chain. The central claim rests on direct experimental measurements of separability rather than any reduction to inputs by construction.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Pretrained embedding models produce feature spaces in which semantic annotation errors appear as detectable outliers.
Reference graph
Works this paper leans on
-
[1]
Emerg- ing properties in self-supervised vision transformers, 2021
Mathilde Caron, Hugo Touvron, Ishan Misra, Herv ´e J´egou, Julien Mairal, Piotr Bojanowski, and Armand Joulin. Emerg- ing properties in self-supervised vision transformers, 2021. 3
2021
-
[2]
Combating noisy labels in object detection datasets, 2023
Krystian Chachula, Jakub Lyskawa, Bartlomiej Olber, Piotr Fratczak, Adam Popowicz, and Krystian Radlak. Combating noisy labels in object detection datasets, 2023. 1, 2, 8
2023
-
[3]
Ting Chen, Simon Kornblith, Mohammad Norouzi, and Ge- offrey E. Hinton. A simple framework for contrastive learn- ing of visual representations.CoRR, abs/2002.05709, 2020. 1
work page internal anchor Pith review Pith/arXiv arXiv 2002
-
[4]
Instance-dependent label-noise learning with manifold- regularized transition matrix estimation, 2022
De Cheng, Tongliang Liu, Yixiong Ning, Nannan Wang, Bo Han, Gang Niu, Xinbo Gao, and Masashi Sugiyama. Instance-dependent label-noise learning with manifold- regularized transition matrix estimation, 2022. 2
2022
-
[5]
Learning with instance-dependent label noise: A sample sieve approach, 2021
Hao Cheng, Zhaowei Zhu, Xingyu Li, Yifei Gong, Xing Sun, and Yang Liu. Learning with instance-dependent label noise: A sample sieve approach, 2021. 1
2021
-
[6]
Instructblip: Towards general- purpose vision-language models with instruction tuning,
Wenliang Dai, Junnan Li, Dongxu Li, Anthony Meng Huat Tiong, Junqi Zhao, Weisheng Wang, Boyang Li, Pascale Fung, and Steven Hoi. Instructblip: Towards general- purpose vision-language models with instruction tuning,
-
[7]
On the state of data in computer vision: Human annotations remain indis- pensable for developing deep learning models, 2021
Zeyad Emam, Andrew Kondrich, Sasha Harrison, Felix Lau, Yushi Wang, Aerin Kim, and Elliot Branson. On the state of data in computer vision: Human annotations remain indis- pensable for developing deep learning models, 2021. 1
2021
-
[8]
Everingham, L
M. Everingham, L. Van Gool, C. K. I. Williams, J. Winn, and A. Zisserman. The PASCAL Visual Object Classes Challenge 2012 (VOC2012) Results. http://www.pascal- network.org/challenges/VOC/voc2012/workshop/index.html. 4
2012
-
[9]
Are we ready for autonomous driving? the kitti vision benchmark suite
Andreas Geiger, Philip Lenz, and Raquel Urtasun. Are we ready for autonomous driving? the kitti vision benchmark suite. InConference on Computer Vision and Pattern Recog- nition (CVPR), 2012. 4, 7
2012
-
[10]
A survey on dataset quality in ma- chine learning.Information and Software Technology, 162: 107268, 2023
Youdi Gong, Guangzhen Liu, Yunzhi Xue, Rui Li, and Lingzhong Meng. A survey on dataset quality in ma- chine learning.Information and Software Technology, 162: 107268, 2023. 1
2023
-
[11]
How we cleaned up PASCAL and improved mAP by 13%.https://www.edge- ai- vision.com/ 2022/08/how-we-cleaned-up-pascal-and -improved-map-by-13/, 2022
Hasty.ai. How we cleaned up PASCAL and improved mAP by 13%.https://www.edge- ai- vision.com/ 2022/08/how-we-cleaned-up-pascal-and -improved-map-by-13/, 2022. 4, 5
2022
-
[12]
Learning with instance- dependent noisy labels by anchor hallucination and hard sample label correction, 2024
Po-Hsuan Huang, Chia-Ching Lin, Chih-Fan Hsu, Ming- Ching Chang, and Wei-Chao Chen. Learning with instance- dependent noisy labels by anchor hallucination and hard sample label correction, 2024. 1
2024
-
[13]
Label-noise robust generative adversarial networks, 2019
Takuhiro Kaneko, Yoshitaka Ushiku, and Tatsuya Harada. Label-noise robust generative adversarial networks, 2019. 3
2019
-
[14]
Learning multiple layers of features from tiny images
Alex Krizhevsky. Learning multiple layers of features from tiny images. Technical report, University of Toronto, 2009. 3, 4
2009
-
[15]
Cifar-10 (canadian institute for advanced research)
Alex Krizhevsky, Vinod Nair, and Geoffrey Hinton. Cifar-10 (canadian institute for advanced research). 4
-
[16]
Understanding instance-level label noise: Dis- parate impacts and treatments, 2021
Yang Liu. Understanding instance-level label noise: Dis- parate impacts and treatments, 2021. 1
2021
-
[17]
The ef- fect of improving annotation quality on object detection datasets: A preliminary study
Jiaxin Ma, Yoshitaka Ushiku, and Miori Sagara. The ef- fect of improving annotation quality on object detection datasets: A preliminary study. In2022 IEEE/CVF Con- ference on Computer Vision and Pattern Recognition Work- shops (CVPRW), pages 4849–4858, 2022. 1
2022
-
[18]
Muller and Karla Markert
Nicolas M. Muller and Karla Markert. Identifying misla- beled instances in classification datasets. In2019 Interna- tional Joint Conference on Neural Networks (IJCNN), page 1–8. IEEE, 2019. 1
2019
-
[19]
Northcutt, Anish Athalye, and Jonas Mueller
Curtis G. Northcutt, Anish Athalye, and Jonas Mueller. Per- vasive label errors in test sets destabilize machine learning benchmarks, 2021. 1, 2, 5, 8
2021
-
[20]
Northcutt, Lu Jiang, and Isaac L
Curtis G. Northcutt, Lu Jiang, and Isaac L. Chuang. Confi- dent learning: Estimating uncertainty in dataset labels, 2022. 1, 2
2022
-
[21]
Kitti vision bench- mark suite
Karlsruhe Institute of Technology (KIT). Kitti vision bench- mark suite. 7
-
[22]
Clip: Contrastive language–image pretraining (github repository).https://github.com/openai/ CLIP
OpenAI. Clip: Contrastive language–image pretraining (github repository).https://github.com/openai/ CLIP. 3
-
[23]
Dinov2: Learning robust visual features with- out supervision, 2024
Maxime Oquab, Timoth ´ee Darcet, Th ´eo Moutakanni, Huy V o, Marc Szafraniec, Vasil Khalidov, Pierre Fernandez, Daniel Haziza, Francisco Massa, Alaaeldin El-Nouby, Mah- moud Assran, Nicolas Ballas, Wojciech Galuba, Russell Howes, Po-Yao Huang, Shang-Wen Li, Ishan Misra, Michael Rabbat, Vasu Sharma, Gabriel Synnaeve, Hu Xu, Herv ´e Je- gou, Julien Mairal, ...
2024
-
[24]
Learning transferable visual models from natural language supervision, 2021
Alec Radford, Jong Wook Kim, Chris Hallacy, Aditya Ramesh, Gabriel Goh, Sandhini Agarwal, Girish Sastry, Amanda Askell, Pamela Mishkin, Jack Clark, Gretchen Krueger, and Ilya Sutskever. Learning transferable visual models from natural language supervision, 2021
2021
-
[25]
Dino: Self-supervised vision trans- formers (github repository).https://github.com/ facebookresearch/dino
Facebook Research. Dino: Self-supervised vision trans- formers (github repository).https://github.com/ facebookresearch/dino. 3
-
[26]
An embedding is worth a thousand noisy labels, 2025
Francesco Di Salvo, Sebastian Doerrich, Ines Rieger, and Christian Ledig. An embedding is worth a thousand noisy labels, 2025. 2
2025
-
[27]
Identifying label errors in object detection datasets by loss inspection, 2023
Marius Schubert, Tobias Riedlinger, Karsten Kahl, Daniel Kr¨oll, Sebastian Schoenen, Sini ˇsa ˇSegvi´c, and Matthias Rottmann. Identifying label errors in object detection datasets by loss inspection, 2023. 1
2023
-
[28]
Cleanlab documentation, 2024
Cleanlab Team. Cleanlab documentation, 2024. Accessed: 2025-03-12. 2
2024
-
[29]
Cleanlab tutorial: Object detection, 2024
Cleanlab Team. Cleanlab tutorial: Object detection, 2024. Accessed: 2025-03-12
2024
-
[30]
Cleanlab research, 2024
Cleanlab Team. Cleanlab research, 2024. Accessed: 2025- 03-12. 2
2024
-
[31]
Objectlab: Automated diagnosis of mislabeled images in ob- ject detection data, 2023
Ulyana Tkachenko, Aditya Thyagarajan, and Jonas Mueller. Objectlab: Automated diagnosis of mislabeled images in ob- ject detection data, 2023. 1, 2, 3, 8
2023
-
[32]
Label con- vergence: Defining an upper performance bound in object recognition through contradictory annotations, 2025
David Tschirschwitz and V olker Rodehorst. Label con- vergence: Defining an upper performance bound in object recognition through contradictory annotations, 2025. 1
2025
-
[33]
Simifeat.https : / / github
UCSC-REAL. Simifeat.https : / / github . com / UCSC-REAL/SimiFeat, 2025. 5
2025
-
[34]
Autovdc: Automated vision data cleaning using vision-language models, 2025
Santosh Vasa, Aditi Ramadwar, Jnana Rama Krishna Dara- battula, Md Zafar Anwar, Stanislaw Antol, Andrei Vatavu, Thomas Monninger, and Sihao Ding. Autovdc: Automated vision data cleaning using vision-language models, 2025. 2
2025
-
[35]
Robust early-learning: Hindering the memorization of noisy labels
Xiaobo Xia, Tongliang Liu, Bo Han, Chen Gong, Nannan Wang, Zongyuan Ge, and Yi Chang. Robust early-learning: Hindering the memorization of noisy labels. InInternational Conference on Learning Representations, 2021. 1
2021
-
[36]
Clusterability as an alternative to anchor points when learning with noisy labels, 2021
Zhaowei Zhu, Yiwen Song, and Yang Liu. Clusterability as an alternative to anchor points when learning with noisy labels, 2021. 3
2021
-
[37]
Detecting cor- rupted labels without training a model to predict, 2022
Zhaowei Zhu, Zihao Dong, and Yang Liu. Detecting cor- rupted labels without training a model to predict, 2022. 2, 4
2022
-
[38]
Vdc: Versatile data cleanser based on visual- linguistic inconsistency by multimodal large language mod- els, 2024
Zihao Zhu, Mingda Zhang, Shaokui Wei, Bingzhe Wu, and Baoyuan Wu. Vdc: Versatile data cleanser based on visual- linguistic inconsistency by multimodal large language mod- els, 2024. 2, 8
2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.