From swept contact to pose: Probe-aware registration via complementary-shape docking
Pith reviewed 2026-05-21 03:32 UTC · model grok-4.3
The pith
Contact registration reformulated as complementary-shape docking with a probe's swept volume recovers precise SE(3) pose without calibration or external sensors.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By treating the probe's swept volume as a complementary shape that docks with the object, the method recovers the object's SE(3) pose from contact and non-contact measurements; the solver combines FFT-based global search over SO(3) samples with continuous Lie-algebra refinement and analytic contact gradients, eliminating the need for fragile point correspondences.
What carries the argument
Complementary-shape docking of the object against the probe's swept volume, which supplies both contact and non-contact constraints to determine the rigid transform.
If this is right
- High-precision robotic tasks such as surgical preparation become possible without optical trackers or external calibration hardware.
- The registration remains accurate across free-form meshes even when initial pose estimates contain noise or when contact is incomplete.
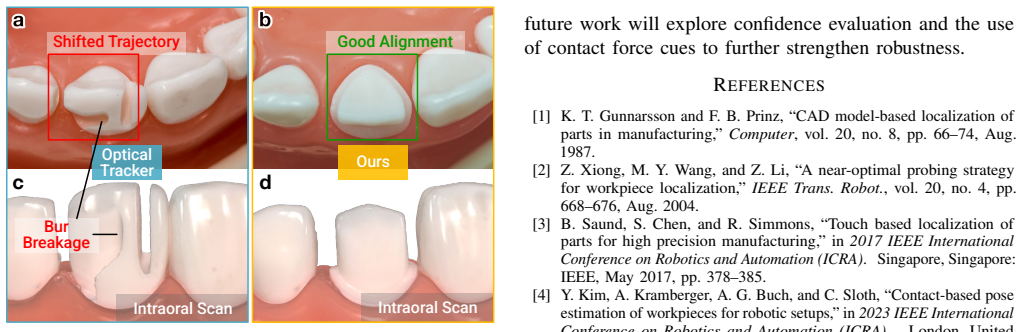
- The same pipeline directly outperforms optical-tracker baselines on a real tooth-preparation robot, attaining 0.42 mm and 3.75 degrees.
- Because no fragile point correspondences are required, the approach tolerates the irregular contact patterns typical of real manipulation.
Where Pith is reading between the lines
- The swept-volume representation could be adapted for online probe-based mapping in unknown environments where only partial surface data are collected.
- Replacing the fixed probe with a deformable or articulated tool would require extending the docking model to time-varying swept volumes.
- The low-discrepancy SO(3) sampling step may transfer to other 6-DOF search problems that combine dense correlation with sparse constraints.
Load-bearing premise
The probe geometry must be known to high accuracy and the combination of contact and non-contact evidence must supply enough constraints for a unique stable pose even when some contacts disappear.
What would settle it
A controlled experiment with ground-truth pose, known probe shape, and deliberately introduced partial contact loss in which the recovered pose error exceeds the claimed sub-millimeter and sub-degree thresholds would falsify the central claim.
Figures








read the original abstract
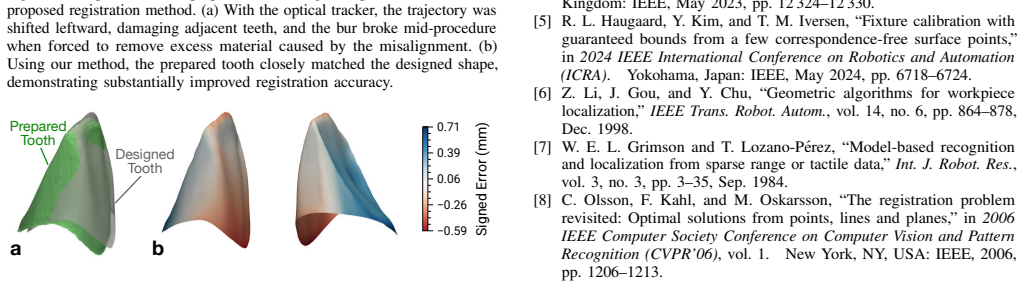
Accurate registration between a prior model and the real scene is essential for high-precision robotic manipulation, yet optical methods suffer from long calibration chains, line-of-sight constraints, and fabrication errors. We propose a calibration-free alternative that reformulates contact registration as complementary-shape docking between the object and the probe's swept volume, explicitly accounting for probe geometry and leveraging both contact and non-contact evidence. Our solver integrates a global-to-local search via 3D FFT correlation over low-discrepancy SO(3) samples, then followed by continuous SE(3) refinement using Lie-algebra updates and analytic contact sensitivities. This pipeline yields efficient exploration and metric-grade convergence without fragile point correspondences. Simulation across free-form meshes achieved sub-0.04 mm and sub-0.4{\deg} accuracy and robustness to pose noise and contact loss. On a tooth-preparation robot, our method attained 0.42 mm and 3.75{\deg}, outperforming an optical tracker registration while requiring no external sensors. These results demonstrate a practical and precise registration strategy for surgical and industrial robots.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a calibration-free registration method for robotic manipulation that reformulates contact-based pose estimation as complementary-shape docking between a prior object model and the swept volume of a known probe geometry. The approach combines a global search using 3D FFT correlation over low-discrepancy SO(3) samples with local continuous refinement via Lie-algebra updates and analytic contact sensitivities that penalize penetration and separation. Simulation results on free-form meshes report sub-0.04 mm translational and sub-0.4° rotational accuracy with robustness to pose noise and partial contact loss; real-world experiments on a tooth-preparation robot achieve 0.42 mm and 3.75° while outperforming an optical tracker without external sensors.
Significance. If the central claims hold, the work provides a practical sensor-free alternative to optical registration for high-precision tasks in surgical and industrial robotics. The integration of swept-volume modeling with FFT global search and Lie-algebra refinement could reduce calibration chains and line-of-sight issues, with the reported metric-grade accuracy and robustness to contact loss representing a potentially useful advance for probe-based systems.
major comments (2)
- [abstract and §4] The central claim of unique, stable SE(3) recovery under partial contact loss (abstract and §4) rests on the swept-volume docking supplying sufficient constraints from both contact and non-contact regions. However, for free-form meshes with symmetry or low-curvature patches, the analytic contact sensitivities (which only penalize penetration/separation) may leave rotational degrees of freedom (e.g., around the probe axis) under-constrained after the 3D FFT search and Lie-algebra refinement; this risks pose ambiguities not fully addressed by the reported robustness tests.
- [§5.2 and Table 2] §5.2 and Table 2: the real-robot results (0.42 mm / 3.75°) outperform the optical tracker, but without reported error analysis, data-exclusion rules, or implementation details for the contact sensing, it is unclear whether the comparison controls for probe geometry accuracy or partial contact scenarios that could affect uniqueness.
minor comments (2)
- [abstract and §3] The abstract and §3 would benefit from explicit notation for the swept-volume representation and the exact form of the analytic contact sensitivities used in the Lie-algebra update.
- [Figure 4] Figure 4 (simulation results) could clarify how contact loss is simulated and whether the low-discrepancy SO(3) sampling density is sufficient to guarantee global convergence for all tested meshes.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed comments. We address each major point below, indicating where revisions will be made to improve clarity and completeness.
read point-by-point responses
-
Referee: [abstract and §4] The central claim of unique, stable SE(3) recovery under partial contact loss (abstract and §4) rests on the swept-volume docking supplying sufficient constraints from both contact and non-contact regions. However, for free-form meshes with symmetry or low-curvature patches, the analytic contact sensitivities (which only penalize penetration/separation) may leave rotational degrees of freedom (e.g., around the probe axis) under-constrained after the 3D FFT search and Lie-algebra refinement; this risks pose ambiguities not fully addressed by the reported robustness tests.
Authors: We appreciate the referee's observation on potential under-constrained rotational degrees of freedom. The complementary-shape docking formulation explicitly incorporates non-contact regions of the swept volume to supply additional geometric constraints beyond penetration penalties alone. The global search via 3D FFT correlation on low-discrepancy SO(3) samples is designed to select poses consistent with the full docking geometry before Lie-algebra refinement. That said, we acknowledge that our existing robustness tests (pose noise and partial contact loss) did not specifically evaluate highly symmetric or extended low-curvature free-form meshes, where ambiguities around the probe axis could persist. In the revised manuscript we will add a discussion of these edge cases and include new simulation results on symmetric and low-curvature objects to characterize the conditions for unique SE(3) recovery. revision: yes
-
Referee: [§5.2 and Table 2] §5.2 and Table 2: the real-robot results (0.42 mm / 3.75°) outperform the optical tracker, but without reported error analysis, data-exclusion rules, or implementation details for the contact sensing, it is unclear whether the comparison controls for probe geometry accuracy or partial contact scenarios that could affect uniqueness.
Authors: We agree that additional methodological transparency is needed for the real-robot experiments. The current presentation reports aggregate accuracy but omits statistical error analysis, explicit data-exclusion criteria, and contact-sensing implementation details. In the revised §5.2 we will add: (i) per-trial error statistics with standard deviations, (ii) data-exclusion rules (e.g., trials with contact coverage below 30 % were discarded), and (iii) specifics on probe geometry verification, force/torque sensor processing, and handling of partial contacts. These additions will clarify how the comparison accounts for probe accuracy and contact scenarios. revision: yes
Circularity Check
No significant circularity in derivation chain
full rationale
The paper describes a registration pipeline using 3D FFT correlation over SO(3) samples for global search followed by Lie-algebra refinement with analytic contact sensitivities. These are standard, externally verifiable optimization techniques with no equations shown that reduce claimed accuracy or uniqueness to a fitted parameter, self-referential definition, or self-citation chain. Simulation and robot results are presented as empirical outcomes rather than tautological predictions. The swept-volume docking model is introduced as a geometric reformulation without load-bearing self-citations or ansatz smuggling visible in the abstract or description. The derivation remains self-contained against external benchmarks like FFT and Lie-group optimization.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Probe geometry is known to high accuracy and can be used to compute the swept volume.
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
reformulates contact registration as complementary-shape docking ... global-to-local search via 3D FFT correlation over low-discrepancy SO(3) samples, then ... continuous SE(3) refinement using Lie-algebra updates and analytic contact sensitivities
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Object Grid ... Probe Swept Occupancy Grid ... Cross-Correlation C[Δk] ... via 3D FFT
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
CAD model-based localization of parts in manufacturing,
K. T. Gunnarsson and F. B. Prinz, “CAD model-based localization of parts in manufacturing,”Computer, vol. 20, no. 8, pp. 66–74, Aug. 1987
work page 1987
-
[2]
A near-optimal probing strategy for workpiece localization,
Z. Xiong, M. Y . Wang, and Z. Li, “A near-optimal probing strategy for workpiece localization,”IEEE Trans. Robot., vol. 20, no. 4, pp. 668–676, Aug. 2004
work page 2004
-
[3]
Touch based localization of parts for high precision manufacturing,
B. Saund, S. Chen, and R. Simmons, “Touch based localization of parts for high precision manufacturing,” in2017 IEEE International Conference on Robotics and Automation (ICRA). Singapore, Singapore: IEEE, May 2017, pp. 378–385
work page 2017
-
[4]
Contact-based pose estimation of workpieces for robotic setups,
Y . Kim, A. Kramberger, A. G. Buch, and C. Sloth, “Contact-based pose estimation of workpieces for robotic setups,” in2023 IEEE International Conference on Robotics and Automation (ICRA). London, United Kingdom: IEEE, May 2023, pp. 12 324–12 330
work page 2023
-
[5]
Fixture calibration with guaranteed bounds from a few correspondence-free surface points,
R. L. Haugaard, Y . Kim, and T. M. Iversen, “Fixture calibration with guaranteed bounds from a few correspondence-free surface points,” in2024 IEEE International Conference on Robotics and Automation (ICRA). Yokohama, Japan: IEEE, May 2024, pp. 6718–6724
work page 2024
-
[6]
Geometric algorithms for workpiece localization,
Z. Li, J. Gou, and Y . Chu, “Geometric algorithms for workpiece localization,”IEEE Trans. Robot. Autom., vol. 14, no. 6, pp. 864–878, Dec. 1998
work page 1998
-
[7]
Model-based recognition and localization from sparse range or tactile data,
W. E. L. Grimson and T. Lozano-P ´erez, “Model-based recognition and localization from sparse range or tactile data,”Int. J. Robot. Res., vol. 3, no. 3, pp. 3–35, Sep. 1984
work page 1984
-
[8]
The registration problem revisited: Optimal solutions from points, lines and planes,
C. Olsson, F. Kahl, and M. Oskarsson, “The registration problem revisited: Optimal solutions from points, lines and planes,” in2006 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’06), vol. 1. New York, NY , USA: IEEE, 2006, pp. 1206–1213
work page 2006
-
[9]
Global localization of objects via touch,
A. Petrovskaya and O. Khatib, “Global localization of objects via touch,”IEEE Trans. Robot., vol. 27, no. 3, pp. 569–585, Jun. 2011
work page 2011
-
[10]
CHSEL: Producing diverse plausible pose estimates from contact and free space data,
S. Zhong, D. Berenson, and N. Fazeli, “CHSEL: Producing diverse plausible pose estimates from contact and free space data,” inRobotics: Science and Systems XIX. Robotics: Science and Systems Foundation, Jul. 2023
work page 2023
-
[11]
Contact probe radius compen- sation using computer aided design models,
M. Ristic, I. Ainsworth, and D. Brujic, “Contact probe radius compen- sation using computer aided design models,”Proc. Inst. Mech. Eng. B: J. Eng. Manuf., vol. 215, no. 6, pp. 819–834, Jun. 2001
work page 2001
-
[12]
E. Katchalski-Katzir, I. Shariv, M. Eisenstein, A. A. Friesem, C. Aflalo, and I. A. Vakser, “Molecular surface recognition: Determination of geometric fit between proteins and their ligands by correlation techniques,”Proc. Natl. Acad. Sci., vol. 89, no. 6, pp. 2195–2199, Mar. 1992
work page 1992
-
[13]
The art and science of molecular docking,
J. M. Paggi, A. Pandit, and R. O. Dror, “The art and science of molecular docking,”Annu. Rev. Biochem., vol. 93, no. 1, pp. 389–410, Aug. 2024
work page 2024
-
[14]
Software for molecular docking: A review,
N. S. Pagadala, K. Syed, and J. Tuszynski, “Software for molecular docking: A review,”Biophys. Rev., vol. 9, no. 2, pp. 91–102, Apr. 2017
work page 2017
-
[15]
Super-fibonacci spirals: Fast, low-discrepancy sampling of SO(3),
M. Alexa, “Super-fibonacci spirals: Fast, low-discrepancy sampling of SO(3),” in2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). New Orleans, LA, USA: IEEE, Jun. 2022, pp. 8281–8290
work page 2022
-
[16]
Generating uniform incremental grids onSO(3) using the Hopf fibration,
A. Yershova, S. Jain, S. M. LaValle, and J. C. Mitchell, “Generating uniform incremental grids onSO(3) using the Hopf fibration,”Int. J. Robot. Res., vol. 29, no. 7, pp. 801–812, Jun. 2010
work page 2010
-
[17]
MuJoCo: A physics engine for model-based control,
E. Todorov, T. Erez, and Y . Tassa, “MuJoCo: A physics engine for model-based control,” in2012 IEEE/RSJ International Conference on Intelligent Robots and Systems. Vilamoura-Algarve, Portugal: IEEE, Oct. 2012, pp. 5026–5033
work page 2012
-
[18]
A limited memory algorithm for bound constrained optimization,
R. H. Byrd, P. Lu, J. Nocedal, and C. Zhu, “A limited memory algorithm for bound constrained optimization,”SIAM J. Sci. Comput., vol. 16, no. 5, pp. 1190–1208, Sep. 1995
work page 1995
-
[19]
A. Wallin, “OpenCAMLib.” [Online]. Available: https://github.com/ aewallin/opencamlib
-
[20]
Northern Digital Inc, “Polaris Lyra,” Mar. 2023. [Online]. Available: https://www.ndigital.com/optical-navigation-technology/polaris-lyra/ 8
work page 2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.