KYON: Semi-Modular Wheel-Legged Quadruped With Agile Bimanual Capability
Pith reviewed 2026-06-30 05:27 UTC · model grok-4.3
The pith
A wheel-legged quadruped with bimanual arms uses base actuators and transmissions to achieve dynamic locomotion and manipulation in unstructured settings.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
KYON demonstrates that a semi-modular wheel-legged quadruped equipped with a bimanual upper body can execute effective dynamic locomotion and bimanual manipulation in complex and unstructured scenarios when actuators are placed in the base with transmission mechanisms and the system is governed by a whole-body control framework plus a reinforcement learning policy.
What carries the argument
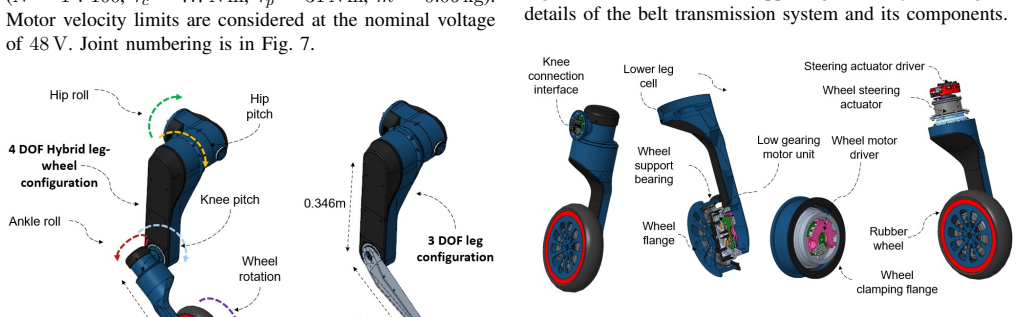
Semi-modular reconfigurable lower legs paired with base-mounted actuators and transmission mechanisms that reduce distal inertia while enabling mode switching between wheeled and legged locomotion.
If this is right
- The robot can reconfigure its lower legs to switch between wheeled and legged locomotion depending on terrain.
- Locomotion and bimanual manipulation can be executed independently while remaining robust to disturbances.
- The platform supports loco-manipulation tasks that require both mobility and upper-body dexterity in the same run.
Where Pith is reading between the lines
- Similar base-actuator layouts could be tested on other hybrid mobile manipulators to check whether inertia reduction generalizes across different leg counts or arm configurations.
- The semi-modular leg approach might allow field upgrades that adapt the same base chassis to new task distributions without full redesign.
Load-bearing premise
Mounting actuators in the base and using transmission mechanisms reduces distal inertia enough to improve agility without introducing unacceptable losses, delays, or control problems.
What would settle it
Measurements on the physical robot showing that transmission losses or added compliance prevent the claimed improvements in dynamic performance or robustness would falsify the central design benefit.
Figures
read the original abstract
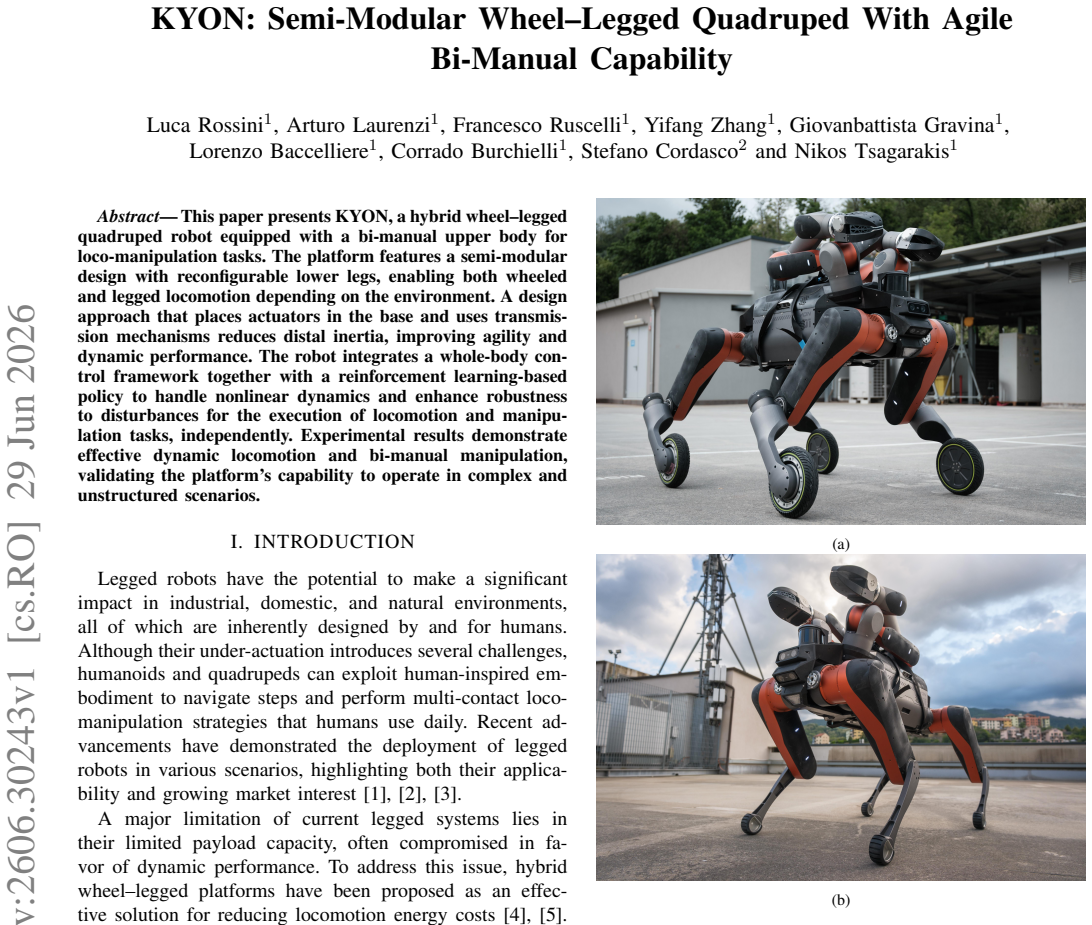
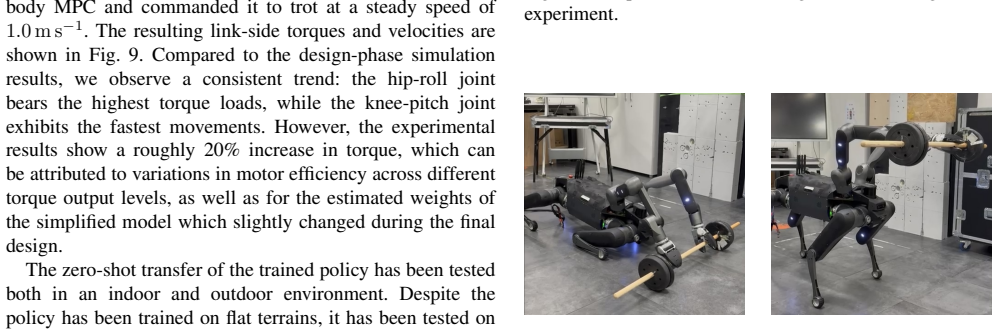
This paper presents KYON, a hybrid wheel-legged quadruped robot equipped with a bimanual upper body for loco-manipulation tasks. The platform features a semi-modular design with a reconfigurable lower legs, enabling both wheeled and legged locomotion depending on the environment. A design approach that places actuators in the base and uses transmission mechanisms reduces distal inertia, improving agility and dynamic performance. The robot integrates a whole-body control framework together with a reinforcement learning based policy to handle nonlinear dynamics and enhance robustness to disturbances for the execution of locomotion and manipulation tasks, independently. Experimental results demonstrate effective dynamic locomotion and bimanual manipulation, validating the platform's capability to operate in complex and unstructured scenarios.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents KYON, a semi-modular wheel-legged quadruped robot with a bimanual upper body for loco-manipulation. It describes a reconfigurable lower-leg design for wheeled or legged modes, base-mounted actuators with transmissions to reduce distal inertia, and a combined whole-body controller plus RL policy for locomotion and manipulation. The central claim is that experiments demonstrate effective dynamic locomotion and bimanual manipulation in complex, unstructured scenarios.
Significance. If supported by quantitative data, the platform's hybrid locomotion modes and reduced-inertia actuation could advance practical loco-manipulation systems. The engineering integration of modularity, transmission design, and hybrid control is a concrete contribution to mobile manipulation hardware.
major comments (1)
- [Experimental Results] Experimental Results (and abstract): the claim that 'Experimental results demonstrate effective dynamic locomotion and bimanual manipulation' is asserted without any reported metrics, baselines, error bars, trial counts, or statistical details, leaving the central validation claim without visible quantitative support.
minor comments (1)
- [Design Approach] The description of the transmission mechanism and its effect on inertia would benefit from a quantitative comparison (e.g., effective inertia values or torque transmission efficiency) to the alternative of distal actuation.
Simulated Author's Rebuttal
We thank the referee for their constructive feedback on our manuscript. We address the single major comment below and will incorporate the suggested improvements in the revised version.
read point-by-point responses
-
Referee: [Experimental Results] Experimental Results (and abstract): the claim that 'Experimental results demonstrate effective dynamic locomotion and bimanual manipulation' is asserted without any reported metrics, baselines, error bars, trial counts, or statistical details, leaving the central validation claim without visible quantitative support.
Authors: We agree that the current version of the manuscript does not include the requested quantitative details (metrics, baselines, error bars, trial counts, or statistical analysis) to support the claims in the experimental results section and abstract. This is a valid observation. In the revised manuscript we will add specific performance metrics (e.g., locomotion speeds, task success rates, disturbance rejection statistics), number of trials, error bars or standard deviations, and any available baseline comparisons. We will also revise the abstract to reflect these quantitative results. These additions will provide the necessary evidence for the effectiveness of the dynamic locomotion and bimanual manipulation. revision: yes
Circularity Check
No circularity: engineering description with no derivations
full rationale
The paper is a hardware/control integration description of the KYON robot. It presents design choices (actuators in base, transmissions), a whole-body controller plus RL policy, and experimental validation of locomotion/manipulation. No equations, fitted parameters renamed as predictions, self-citations used as load-bearing uniqueness theorems, or ansatzes appear in the provided abstract or description. The central claim rests on physical experiments, which are externally falsifiable and not reducible to the paper's own inputs by construction. This matches the default expectation of no significant circularity for non-derivational engineering work.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Dynamics, “Spot,” 2023
B. Dynamics, “Spot,” 2023. [Online]. Available: https://www. bostondynamics.com/spot
2023
-
[2]
Anymal x
ANYbotics, “Anymal x.” [Online]. Available: https://www.anybotics. com/robotics/anymal-x/
-
[3]
Available: https://www.unitree.com/b2
Unitree, “B2.” [Online]. Available: https://www.unitree.com/b2
-
[4]
Centauro: A hybrid locomotion and high power resilient manipulation platform,
N. Kashiri, L. Baccelliere, L. Muratore, A. Laurenzi, Z. Ren, E. M. Hoffman, M. Kamedula, G. F. Rigano, J. Malzahn, S. Cordasco, P. Guria, A. Margan, and N. G. Tsagarakis, “Centauro: A hybrid locomotion and high power resilient manipulation platform,”IEEE Robotics and Automation Letters, vol. 4, no. 2, pp. 1595–1602, 2019
2019
-
[5]
Barry: A high-payload and agile quadruped robot,
G. Valsecchi, N. Rudin, L. Nachtigall, K. Mayer, F. Tischhauser, and M. Hutter, “Barry: A high-payload and agile quadruped robot,”IEEE Robotics and Automation Letters, vol. 8, pp. 6939–6946, 2023
2023
-
[6]
Bigdog, the rough-terrain quadruped robot,
M. Raibert, K. Blankespoor, G. Nelson, and R. Playter, “Bigdog, the rough-terrain quadruped robot,”IF AC Proceedings V olumes, vol. 41, no. 2, pp. 10 822–10 825, 2008, 17th IFAC World Congress. [Online]. Available: https://www.sciencedirect.com/science/article/pii/ S1474667016407020
2008
-
[7]
Introducing wildcat,
B. Dynamics, “Introducing wildcat,” 2013. [Online]. Available: https://www.youtube.com/watch?v=wE3fmFTtP9g
2013
-
[8]
Ls3 - legged squad support system,
——, “Ls3 - legged squad support system,” 2012. [Online]. Available: https://youtu.be/R7ezXBEBE6U
2012
-
[9]
Design and experimental evaluation of the hydraulically actuated prototype leg of the hyq robot,
C. Semini, N. G. Tsagarakis, E. Guglielmino, and D. G. Caldwell, “Design and experimental evaluation of the hydraulically actuated prototype leg of the hyq robot,” in2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2010, pp. 3640–3645
2010
-
[10]
Design of hyq – a hydraulically and electrically actuated quadruped robot,
C. Semini, N. G. Tsagarakis, E. Guglielmino, M. Focchi, F. Cannella, and D. G. Caldwell, “Design of hyq – a hydraulically and electrically actuated quadruped robot,”Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering, vol. 225, no. 6, pp. 831–849, 2011. [Online]. Available: https://doi.org/10.1177/095...
-
[11]
Design of the hydraulically actuated, torque- controlled quadruped robot hyq2max,
C. Semini, V . Barasuol, J. Goldsmith, M. Frigerio, M. Focchi, Y . Gao, and D. G. Caldwell, “Design of the hydraulically actuated, torque- controlled quadruped robot hyq2max,”IEEE/ASME Transactions on Mechatronics, vol. 22, no. 2, pp. 635–646, 2017
2017
-
[12]
Design and implementation of scalf, an advanced hydraulic quadruped robot,
H. Chai, J. Meng, X. Rong, and Y . Li, “Design and implementation of scalf, an advanced hydraulic quadruped robot,” vol. 36, pp. 385–391, 07 2014
2014
-
[13]
Baby elephant robot can carry people,
S. J. T. University, “Baby elephant robot can carry people,” 2014. [Online]. Available: https://www.youtube.com/watch?v=Iioy1e pJUI
2014
-
[14]
The lite, lynx and x series
D. Robotics, “The lite, lynx and x series.” [Online]. Available: https://www.deeprobotics.cn/en
-
[15]
Deep whole-body control: Learning a unified policy for manipulation and locomotion,
Z. Fu, X. Cheng, and D. Pathak, “Deep whole-body control: Learning a unified policy for manipulation and locomotion,” inProceedings of The 6th Conference on Robot Learning, ser. Proceedings of Machine Learning Research, K. Liu, D. Kulic, and J. Ichnowski, Eds., vol
-
[16]
PMLR, 14–18 Dec 2023, pp. 138–149. [Online]. Available: https://proceedings.mlr.press/v205/fu23a.html
2023
-
[17]
Articulated object interaction in unknown scenes with whole-body mobile manipulation,
M. Mittal, D. Hoeller, F. Farshidian, M. Hutter, and A. Garg, “Articulated object interaction in unknown scenes with whole-body mobile manipulation,” in2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022, pp. 1647–1654
2022
-
[18]
Learning whole-body loco-manipulation for omni-directional task space pose tracking with a wheeled-quadrupedal-manipulator,
K. Jiang, Z. Fu, J. Guo, W. Zhang, and H. Chen, “Learning whole-body loco-manipulation for omni-directional task space pose tracking with a wheeled-quadrupedal-manipulator,”IEEE Robotics and Automation Letters, vol. 10, no. 2, pp. 1481–1488, 2025
2025
-
[19]
Perceptive pedipulation with local obstacle avoidance,
J. Stolle, P. Arm, M. Mittal, and M. Hutter, “Perceptive pedipulation with local obstacle avoidance,” in2024 IEEE-RAS 23rd International Conference on Humanoid Robots (Humanoids), 2024, pp. 157–164
2024
-
[20]
Learning multi-agent loco-manipulation for long-horizon quadrupedal pushing,
Y . Feng, C. Hong, Y . Niu, S. Liu, Y . Yang, and D. Zhao, “Learning multi-agent loco-manipulation for long-horizon quadrupedal pushing,” in2025 IEEE International Conference on Robotics and Automation (ICRA), 2025, pp. 14 441–14 448
2025
-
[21]
Horizon: A trajectory optimization framework for robotic systems,
F. Ruscelli, A. Laurenzi, N. G. Tsagarakis, and E. Mingo Hoffman, “Horizon: A trajectory optimization framework for robotic systems,”Frontiers in Robotics and AI, vol. V olume 9 - 2022, 2022. [Online]. Available: https://www.frontiersin.org/journals/ robotics-and-ai/articles/10.3389/frobt.2022.899025
-
[22]
Cartesi/o: A ros based real-time capable cartesian control framework,
A. Laurenzi, E. M. Hoffman, L. Muratore, and N. G. Tsagarakis, “Cartesi/o: A ros based real-time capable cartesian control framework,” in2019 International Conference on Robotics and Automation (ICRA), 2019, pp. 591–596
2019
-
[23]
Learning quadrupedal locomotion over challenging terrain,
J. Lee, J. Hwangbo, L. Wellhausen, V . Koltun, and M. Hutter, “Learning quadrupedal locomotion over challenging terrain,”Science Robotics, vol. 5, no. 47, p. eabc5986, 2020. [Online]. Available: https://www.science.org/doi/abs/10.1126/scirobotics.abc5986
-
[24]
The xbot2 real-time middleware for robotics,
A. Laurenzi, D. Antonucci, N. G. Tsagarakis, and L. Muratore, “The xbot2 real-time middleware for robotics,”Robotics and Autonomous Systems, vol. 163, p. 104379, 2023. [Online]. Available: https: //www.sciencedirect.com/science/article/pii/S0921889023000180
2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.