Grounding LLM Reasoning under Incomplete Graph Evidence
Pith reviewed 2026-06-30 06:27 UTC · model grok-4.3
The pith
Under open-world incompleteness no hard rule using only observed graph evidence can reject every false trajectory while retaining every true but unobserved one.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
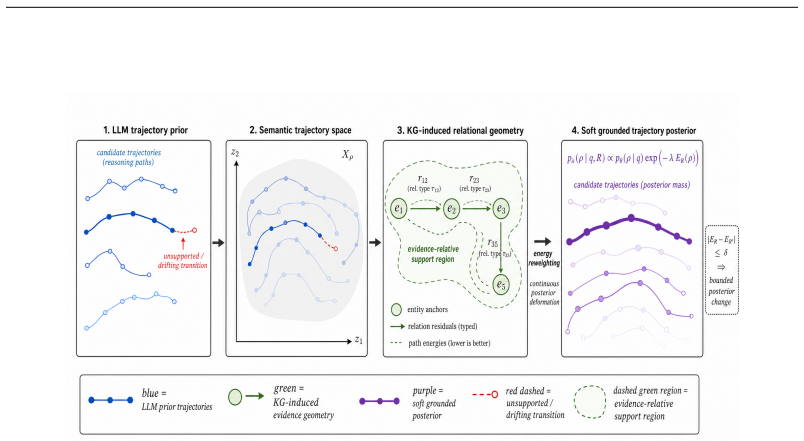
Under open-world incompleteness, no hard rule based only on the observed state can both reject every false unsupported trajectory and retain every true-but-unobserved one. Soft grounding is characterized as a KL-regularized deformation of the LLM prior in which finite slack preserves support for unsupported but non-contradicted trajectories, while hard conditioning appears as the infinite-penalty limit. The framework also produces stability bounds under evidence perturbations and treats KG compatibility as declared support rather than factual truth.
What carries the argument
The evidence state inducing entity anchors, typed relation residuals, path energies and support regions, together with the language-model prior over candidate trajectories.
If this is right
- Stability bounds on grounding quality follow directly from perturbations to the evidence state.
- Finite slack in the KL-regularized prior keeps non-contradicted trajectories viable.
- Constraint regimes are clarified for GraphRAG, KGQA, graph agents, constrained decoding and faithful generation.
- All compatibility claims remain relative to declared support in the observed evidence.
Where Pith is reading between the lines
- Systems may therefore prefer tunable probabilistic penalties over strict deterministic filters when evidence is known to be incomplete.
- The same separation between observed support and unobserved truth could be tested in other domains that combine partial structured data with generative models.
- Empirical checks could measure how much slack is needed in practice to recover trajectories that the hard rule would have discarded.
Load-bearing premise
The observed evidence state induces entity anchors, typed relation residuals, path energies and support regions while the language model supplies a prior over candidate trajectories.
What would settle it
A concrete deterministic rule, defined only on the observed graph state, that rejects every false unsupported trajectory and retains every true-but-unobserved trajectory in an open-world setting would falsify the central claim.
Figures
read the original abstract
Knowledge graphs can guide large language models (LLMs) reasoning, but the graph seen by a system is usually a retrieved, linked, temporally scoped, and incomplete evidence state rather than a complete account of truth. We develop a theoretical perspective on grounding observable LLM trajectories under such incomplete graph evidence.The evidence state induces entity anchors, typed relation residuals, path energies, and support regions, while the language model supplies a prior over candidate trajectories. We show that, under open-world incompleteness, no hard rule based only on the observed state can both reject every false unsupported trajectory and retain every true-but-unobserved one.We then characterize soft grounding as a KL-regularized deformation of the LLM prior: finite slack preserves support for unsupported but non-contradicted trajectories, whereas hard conditioning appears as an infinite-penalty limit.The framework also yields stability bounds under evidence perturbations and clarifies the constraint regimes appropriate for GraphRAG, KGQA, graph agents, constrained decoding, and faithful generation. The claims are evidence-relative: KG compatibility is treated as declared support, not factual truth.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper develops a theoretical perspective on grounding LLM reasoning trajectories under incomplete knowledge graph evidence. The evidence state is modeled as inducing entity anchors, typed relation residuals, path energies, and support regions, while the LLM supplies a prior over candidate trajectories. The central claim is an impossibility result: under open-world incompleteness, no hard rule based only on the observed state can reject every false unsupported trajectory while retaining every true-but-unobserved one. Soft grounding is characterized as a KL-regularized deformation of the LLM prior (with finite slack preserving support for non-contradicted trajectories), and the framework yields stability bounds under evidence perturbations with implications for GraphRAG, KGQA, graph agents, constrained decoding, and faithful generation. Claims are framed as evidence-relative rather than factual.
Significance. If the derivations and formalizations hold, the work offers a principled analysis distinguishing hard versus soft grounding in LLM-KG systems and supplies stability bounds that could inform design choices in retrieval-augmented generation and constrained generation pipelines. The impossibility result, if rigorously established, would clarify inherent limits of observation-only hard rules under incompleteness.
major comments (3)
- [Abstract and §3] Abstract and §3 (Theoretical Framework): The impossibility result—that no hard rule based only on the observed state can reject every false unsupported trajectory while retaining every true-but-unobserved one—rests on the claim that the evidence state induces path energies and support regions. No explicit construction, uniqueness argument, or robustness check for these induced structures (e.g., via alternative residual typing or energy functions) is visible, leaving open whether the result holds only for the chosen induction or more generally.
- [§4] §4 (Impossibility Result): The central impossibility theorem is stated without a visible derivation, proof sketch, or reduction to the stated axioms about evidence-induced structures and the LLM prior. Without these steps, it is not possible to verify whether the modeling choices are load-bearing or whether the result follows directly from the open-world incompleteness assumption.
- [§5] §5 (Stability Bounds): The stability bounds under evidence perturbations are asserted but lack the explicit functional forms, assumptions on perturbation size, or proof outline needed to assess their tightness or applicability to the GraphRAG and constrained-decoding regimes discussed later.
minor comments (2)
- [§3] Notation for 'path energies' and 'support regions' should be introduced with explicit equations early in the theoretical section to aid readability.
- [Abstract] The abstract's phrasing of the impossibility result could be cross-referenced to the precise theorem statement and assumptions in the body for clarity.
Simulated Author's Rebuttal
We thank the referee for the constructive comments highlighting the need for greater explicitness in our derivations. We address each major point below and will expand the relevant sections with additional constructions, proof sketches, and functional forms in the revision.
read point-by-point responses
-
Referee: [Abstract and §3] Abstract and §3 (Theoretical Framework): The impossibility result—that no hard rule based only on the observed state can reject every false unsupported trajectory while retaining every true-but-unobserved one—rests on the claim that the evidence state induces path energies and support regions. No explicit construction, uniqueness argument, or robustness check for these induced structures (e.g., via alternative residual typing or energy functions) is visible, leaving open whether the result holds only for the chosen induction or more generally.
Authors: Section 3 explicitly constructs the induction: the evidence state maps observed triples to typed relation residuals, defines path energies as the sum of residual penalties along candidate paths, and derives support regions as the sets of trajectories with finite energy. The impossibility result relies only on the existence of such regions under open-world incompleteness (i.e., true trajectories outside the observed support), not on uniqueness of any particular energy function. We will add a short robustness paragraph noting that the argument is invariant under monotonic transformations of the energy function. revision: partial
-
Referee: [§4] §4 (Impossibility Result): The central impossibility theorem is stated without a visible derivation, proof sketch, or reduction to the stated axioms about evidence-induced structures and the LLM prior. Without these steps, it is not possible to verify whether the modeling choices are load-bearing or whether the result follows directly from the open-world incompleteness assumption.
Authors: The theorem is proved by reductio: suppose a hard rule R exists that rejects all false unsupported trajectories while retaining all true-but-unobserved ones. Under the open-world axiom, there exist pairs of trajectories that are observationally indistinguishable yet one is false and one is true; any such R must therefore either reject a true trajectory or retain a false one, contradicting the assumption. We will insert a compact proof sketch immediately after the theorem statement that reduces directly to the evidence-induction axioms and the LLM prior. revision: yes
-
Referee: [§5] §5 (Stability Bounds): The stability bounds under evidence perturbations are asserted but lack the explicit functional forms, assumptions on perturbation size, or proof outline needed to assess their tightness or applicability to the GraphRAG and constrained-decoding regimes discussed later.
Authors: The bounds are stated as |ΔP(τ)| ≤ L·ε for evidence perturbation size ε, where L is the Lipschitz constant of the path-energy map with respect to residual changes; the derivation assumes bounded residual sensitivity and uses the triangle inequality on the KL term. We will add the explicit functional form, the precise Lipschitz assumption, and a one-paragraph proof outline, together with a brief discussion of how the bound informs GraphRAG retrieval budgets. revision: yes
Circularity Check
No significant circularity; derivation self-contained from stated modeling assumptions
full rationale
The paper's central impossibility result is presented as following directly from the modeling choice that the evidence state induces entity anchors, typed relation residuals, path energies, and support regions while the LLM supplies a prior. This is an explicit assumption stated in the abstract, not a reduction of a fitted parameter or a self-citation chain. No equations, self-citations, or renamings are visible in the provided text that would make the result equivalent to its inputs by construction. The framework treats KG compatibility as declared support and derives soft/hard grounding characterizations and stability bounds from the same premises without circular steps. This is the normal case of a self-contained theoretical perspective.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption The evidence state induces entity anchors, typed relation residuals, path energies, and support regions
- domain assumption The language model supplies a prior over candidate trajectories
invented entities (2)
-
path energies
no independent evidence
-
support regions
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Antoine Bordes, Nicolas Usunier, Alberto Garcia-Duran, Jason Weston, and Oksana Yakhnenko
doi: 10.1609/aaai.v38i16.29720. Antoine Bordes, Nicolas Usunier, Alberto Garcia-Duran, Jason Weston, and Oksana Yakhnenko. Translating embeddings for modeling multi-relational data. InAdvances in Neural Information Processing Systems, volume 26, pp. 2787–2795,
-
[2]
From Local to Global: A Graph RAG Approach to Query-Focused Summarization
Darren Edge, Ha Trinh, Newman Cheng, Joshua Bradley, Alex Chao, Apurva Mody, Steven Truitt, Dasha Metropolitansky, Robert Osazuwa Ness, and Jonathan Larson. From local to global: A GraphRAG approach to query-focused summarization.arXiv preprint arXiv:2404.16130,
work page internal anchor Pith review Pith/arXiv arXiv
-
[3]
From Local to Global: A Graph RAG Approach to Query-Focused Summarization
doi: 10.48550/arXiv.2404.16130. Wenqi Fan, Yujuan Ding, Liangbo Ning, Shijie Wang, Hengyun Li, Dawei Yin, Tat-Seng Chua, and Qing Li. A survey on RAG meeting LLMs: Towards retrieval-augmented large language models. InProceedings of the 30th ACM SIGKDD Conference on Knowledge Discovery and Data Mining, pp. 6491–6501. Association for Computing Machinery,
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.2404.16130
-
[4]
In: Proceedings of the 30th ACM SIGKDD Conference on Knowledge Discovery and Data Mining
doi: 10.1145/3637528.3671470. Kuzman Ganchev, Jo˜ao Grac ¸a, Jennifer Gillenwater, and Ben Taskar. Posterior regularization for structured latent variable models.Journal of Machine Learning Research, 11:2001–2049,
-
[5]
Association for Computational Linguistics. doi: 10.18653/v1/P17-1141. Zhiting Hu, Xuezhe Ma, Zhengzhong Liu, Eduard Hovy, and Eric P. Xing. Harnessing deep neural networks with logic rules. InProceedings of the 54th Annual Meeting of the Association for Computational Linguistics (Volume 1: Long Papers), pp. 2410–2420, Berlin, Germany,
-
[6]
Association for Computational Linguistics. doi: 10.18653/v1/P16-1228. Jinhao Jiang, Kun Zhou, Zican Dong, Keming Ye, Wayne Xin Zhao, and Ji-Rong Wen. Structgpt: A general framework for large language model to reason over structured data. InProceedings of the 2023 Conference on Empirical Methods in Natural Language Processing, pp. 9237–9251, Singapore,
-
[7]
doi: 10.18653/v1/2023.emnlp-main
Association for Computational Linguistics. doi: 10.18653/v1/2023.emnlp-main
-
[8]
doi: 10.18653/v1/2025.acl-long.468
Association for Computational Linguistics. doi: 10.18653/v1/2025.acl-long.468. Jiho Kim, Yeonsu Kwon, Yohan Jo, and Edward Choi. Kg-gpt: A general framework for reasoning on knowledge graphs using large language models. InFindings of the Association for Computational Linguistics: EMNLP 2023, pp. 9410–9421, Singapore,
-
[9]
doi: 10.18653/v1/2023.findings-emnlp.631
Association for Computational Linguistics. doi: 10.18653/v1/2023.findings-emnlp.631. Yann LeCun, Sumit Chopra, Raia Hadsell, Marc’Aurelio Ranzato, and Fu Jie Huang. A tutorial on energy-based learning. In G ¨okhan Bakir, Thomas Hofmann, Bernhard Sch¨olkopf, Alexander J. Smola, Ben Taskar, and S. V . N. Vishwanathan (eds.),Predicting Structured Data. MIT Press,
-
[10]
GNN-RAG: Graph neural retrieval for efficient large language model reasoning on knowledge graphs
21 Costas Mavromatis and George Karypis. GNN-RAG: Graph neural retrieval for efficient large language model reasoning on knowledge graphs. InFindings of the Association for Computational Linguistics: ACL 2025, pp. 16682–16699, Vienna, Austria,
2025
-
[11]
doi: 10.18653/v1/2025.findings-acl.856
Association for Computational Linguistics. doi: 10.18653/v1/2025.findings-acl.856. Shirui Pan, Linhao Luo, Yufei Wang, Chen Chen, Jiapu Wang, and Xindong Wu. Unifying large language models and knowledge graphs: A roadmap.IEEE Transactions on Knowledge and Data Engineering, 36(7):3580–3599,
-
[12]
Tyler Thomas Procko and Omar Ochoa
doi: 10.1109/TKDE.2024.3352100. Tyler Thomas Procko and Omar Ochoa. Graph retrieval-augmented generation for large language models: A survey. In2024 Conference on AI, Science, Engineering, and Technology (AIxSET), pp. 166–169. IEEE,
-
[13]
doi: 10.1109/AIxSET62544.2024.00030. David I. Shuman, Sunil K. Narang, Pascal Frossard, Antonio Ortega, and Pierre Vandergheynst. The emerging field of signal processing on graphs: Extending high-dimensional data analysis to networks and other irregular domains.IEEE Signal Processing Magazine, 30(3):83–98,
-
[14]
IEEE Signal Processing Magazine30(3), 83–98 (2013)
doi: 10.1109/MSP.2012.2235192. Yuan Sui, Yufei He, Zifeng Ding, and Bryan Hooi. Can knowledge graphs make large language models more trustworthy? an empirical study over open-ended question answering. InProceedings of the 63rd Annual Meeting of the Association for Computational Linguistics (Volume 1: Long Papers), pp. 12685–12701, Vienna, Austria,
-
[15]
doi: 10.18653/v1/2025.acl-long.622
Association for Computational Linguistics. doi: 10.18653/v1/2025.acl-long.622. Jiashuo Sun, Chengjin Xu, Lumingyuan Tang, Saizhuo Wang, Chen Lin, Yeyun Gong, Lionel Ni, Heung-Yeung Shum, and Jian Guo. Think-on-graph: Deep and responsible reasoning of large language model on knowledge graph. InInternational Conference on Learning Representations, volume 20...
-
[16]
The web as a knowledge-base for answering complex questions
Alon Talmor and Jonathan Berant. The web as a knowledge-base for answering complex questions. InProceedings of the 2018 Conference of the North American Chapter of the Association for Computational Linguistics: Human Language Technologies, Volume 1 (Long Papers), pp. 641–651, New Orleans, Louisiana,
2018
-
[17]
doi: 10.18653/v1/ 2024.acl-long.452
Association for Computational Linguistics. doi: 10.18653/v1/ N18-1059. Jason Wei, Xuezhi Wang, Dale Schuurmans, Maarten Bosma, Brian Ichter, Fei Xia, Ed Chi, Quoc V Le, and Denny Zhou. Chain-of-thought prompting elicits reasoning in large language models. Advances in Neural Information Processing Systems, 35:24824–24837,
-
[18]
Griffiths, Yuan Cao, and Karthik Narasimhan
Shunyu Yao, Dian Yu, Jeffrey Zhao, Izhak Shafran, Thomas L. Griffiths, Yuan Cao, and Karthik Narasimhan. Tree of thoughts: Deliberate problem solving with large language models.Advances in Neural Information Processing Systems, 36, 2023a. Shunyu Yao, Jeffrey Zhao, Dian Yu, Nan Du, Izhak Shafran, Karthik R Narasimhan, and Yuan Cao. ReAct: Synergizing reaso...
2021
-
[19]
doi: 10.18653/v1/2021.naacl-main.45
Association for Computational Linguistics. doi: 10.18653/v1/2021.naacl-main.45. A Coverage-Limited Hard Support and Finite-Slack Preservation This and the following appendices provide technical supplements to the main perspective. They do not replace the KL-regularized posterior account in Section
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.