CADET: A Modular Platform for Evaluating Distributed Cooperative Autonomy in Connected Autonomous Vehicles
Pith reviewed 2026-06-28 09:40 UTC · model grok-4.3
The pith
Distributed deployment choices across vehicles and infrastructure determine safety in connected autonomous vehicles.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
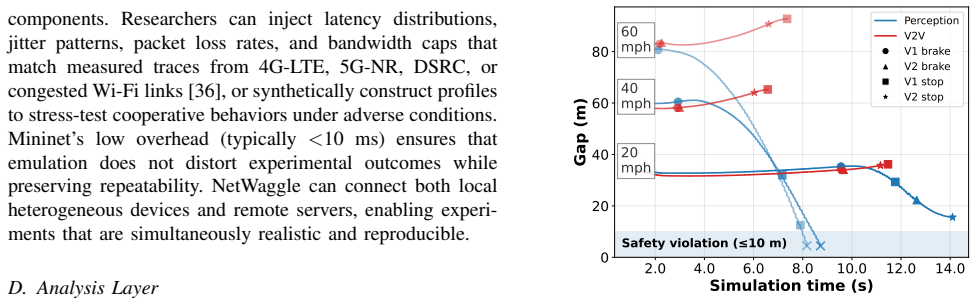
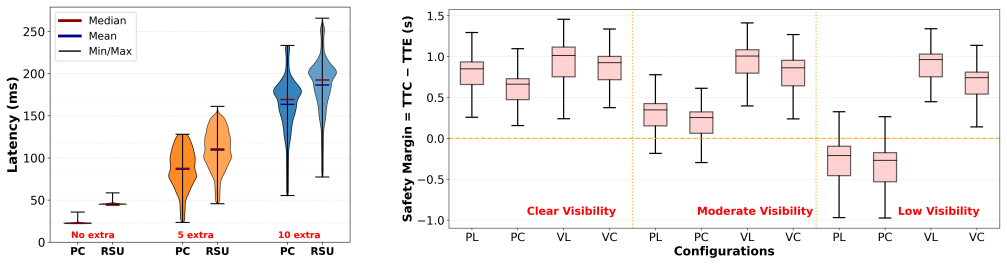
CADET shows that distributed deployment choices fundamentally shape safety, with V2V intent packets outperforming cloud-based perception and RSU-assisted perception sustaining safety until overloaded by concurrent requests.
What carries the argument
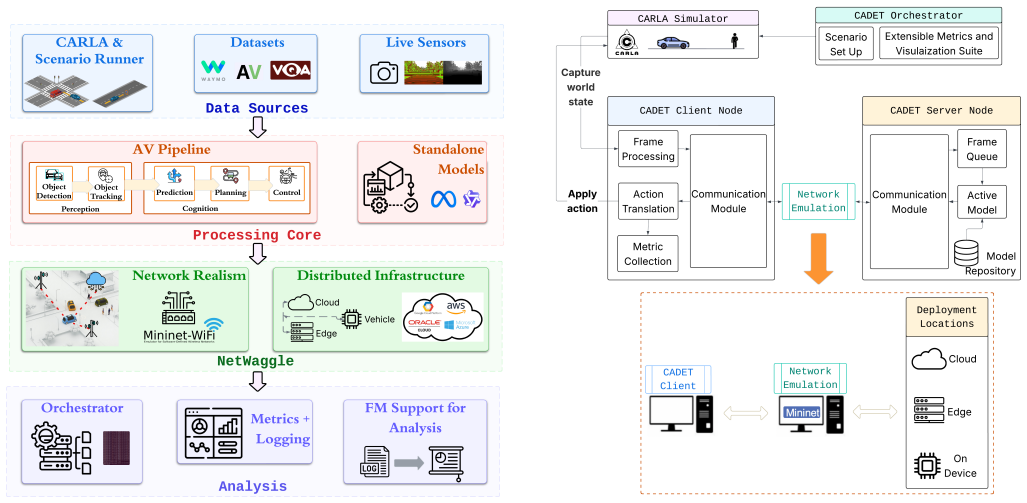
CADET, a modular platform that decouples the AV stack into composable modules deployable across vehicles, infrastructure, and cloud tiers, with trace-driven network and workload emulation plus multi-level instrumentation.
If this is right
- V2V intent sharing maintains higher safety than cloud-based perception under the tested conditions.
- RSU-assisted perception supports safe operation only up to the point where concurrent requests cause overload.
- Modular decoupling of the AV stack enables systematic comparison of deployment options for safety.
- Dataset-driven use of the platform allows benchmarking of distributed inference without full vehicle simulation.
Where Pith is reading between the lines
- Designers may need to favor direct short-range vehicle communication over cloud offload when latency or contention is high.
- The overload threshold for roadside units suggests a need for admission control or load balancing in multi-vehicle scenarios.
- Extending the emulation to include mobility traces from real cities could test whether the safety ordering persists at scale.
Load-bearing premise
The trace-driven network and workload emulation accurately captures the latency, heterogeneity, and contention effects that occur in real V2X deployments.
What would settle it
Physical vehicle and infrastructure tests under the same deployment configurations that produce different safety outcomes than the emulation would show the claim does not hold.
Figures
read the original abstract
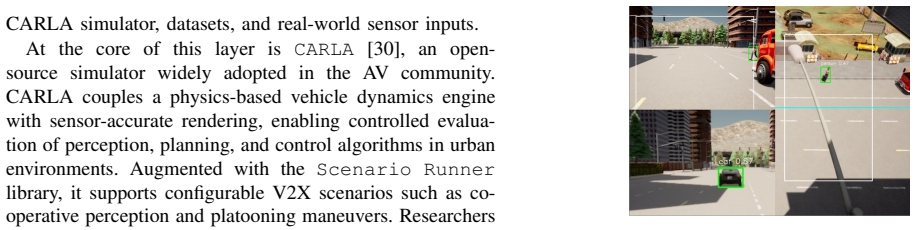
Deep learning models are increasingly central to autonomous vehicle (AV) pipelines, yet their integration has traditionally followed a monolithic design where perception, planning, and control execute on a single onboard computer. This design overlooks the emerging paradigm of cooperative autonomy, where vehicles interact with roadside units (RSUs), edge servers, and cloud-hosted intelligence through vehicle-to-everything (V2X) connectivity. Cooperative perception and control improve safety and efficiency, but also introduce systems-level challenges: network latency, compute heterogeneity, and multi-tenant contention, all critically affect real-time decision-making. These challenges are further amplified by the increasing reliance on large foundation models, whose scale necessitates cloud deployment. We present CADET (Cooperative Autonomy through Distributed Experimentation Toolkit), a modular platform for systematic and reproducible evaluation of distributed cooperative autonomy systems under realistic deployment conditions. CADET decouples the AV stack into composable modules that can be flexibly deployed across vehicles, infrastructure, and edge/cloud tiers. The framework integrates state-of-the-art models, incorporates trace-driven network and workload emulation, and provides synchronized model-, system-, and task-level instrumentation. Through V2V and V2I experiments, we show that distributed deployment choices fundamentally shape safety, with V2V intent packets outperforming cloud-based perception and RSU-assisted perception sustaining safety until overloaded by concurrent requests. Although designed for AV pipelines, CADET also supports dataset-driven experimentation, enabling systems and ML researchers to benchmark distributed inference workloads independently of full vehicle simulation. CADET is open source, with code and demo available at https://nesl.github.io/cadet-web.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents CADET, a modular platform for systematic evaluation of distributed cooperative autonomy in connected autonomous vehicles. It decouples the AV stack (perception, planning, control) into composable modules that can be deployed across vehicles, RSUs, edge servers, and cloud tiers. The framework incorporates state-of-the-art models, trace-driven network and workload emulation for latency/heterogeneity/contention, and synchronized instrumentation at model/system/task levels. Through V2V and V2I experiments, it claims that deployment choices fundamentally shape safety outcomes, with V2V intent packets outperforming cloud-based perception and RSU-assisted perception sustaining safety until overloaded by concurrent requests. CADET also supports dataset-driven benchmarking of distributed inference and is released as open source.
Significance. If the emulation fidelity holds, the work supplies a needed open-source toolkit for reproducible study of systems-level effects (latency, multi-tenancy, heterogeneity) in cooperative AV pipelines that prior monolithic designs have overlooked. Explicitly crediting the open-source release, modular decoupling, and support for both full-stack and dataset-only experimentation is appropriate; these lower barriers for systems and ML researchers working on V2X foundation-model deployments.
major comments (1)
- [Abstract] Abstract: the central empirical claim that 'V2V intent packets outperforming cloud-based perception' and 'RSU-assisted perception sustaining safety until overloaded by concurrent requests' is generated by trace-driven network and workload emulation, yet the manuscript supplies no hardware-in-the-loop validation, trace-validation metrics (e.g., latency distribution KS statistics), or sensitivity analysis to emulation parameters. Because these safety-ordering results are the primary evidence offered for the platform's utility, the absence of such grounding makes the ordering impossible to assess as a property of real V2X deployments rather than an emulation artifact.
minor comments (1)
- [Abstract] Abstract: the phrase 'synchronized model-, system-, and task-level instrumentation' is introduced without any indication of the concrete metrics collected or the synchronization mechanism employed.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on the validation of our trace-driven emulation results. We address the major comment point by point below.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central empirical claim that 'V2V intent packets outperforming cloud-based perception' and 'RSU-assisted perception sustaining safety until overloaded by concurrent requests' is generated by trace-driven network and workload emulation, yet the manuscript supplies no hardware-in-the-loop validation, trace-validation metrics (e.g., latency distribution KS statistics), or sensitivity analysis to emulation parameters. Because these safety-ordering results are the primary evidence offered for the platform's utility, the absence of such grounding makes the ordering impossible to assess as a property of real V2X deployments rather than an emulation artifact.
Authors: We agree that the current manuscript does not include hardware-in-the-loop validation, KS statistics on latency distributions, or explicit sensitivity analysis to emulation parameters. The presented results rely on trace-driven emulation of network and workload conditions using publicly available traces, and the safety-ordering observations are intended to illustrate the platform's ability to expose deployment effects rather than to claim direct equivalence to physical V2X systems. In the revised manuscript we will add a dedicated subsection on emulation methodology that includes sensitivity analysis across key parameters (latency variance, contention levels, and trace scaling) and an explicit discussion of assumptions and limitations. We will also report any available distributional comparisons between emulated and source traces where the underlying datasets permit. Hardware-in-the-loop validation lies outside the scope of this work, which introduces an emulation toolkit; we will state this limitation clearly. revision: yes
Circularity Check
No circularity: platform description with empirical experiments, no derivations or self-referential fits
full rationale
The paper introduces CADET as a modular evaluation toolkit for distributed AV systems and reports results from V2V/V2I experiments conducted within it. No mathematical derivations, equations, fitted parameters, or predictions are present. The central claims rest on direct experimental outputs from the described emulation and instrumentation rather than any reduction to prior inputs or self-citations. The emulation is presented as an implemented feature whose fidelity is an external validation concern, not a load-bearing derivation step. This matches the default case of a self-contained systems paper with no circular structure.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Apollo: Open source autonomous driving
Baidu Apollo, “Apollo: Open source autonomous driving.”https: //github.com/ApolloAuto/apollo. Accessed: 2025-09-15
2025
-
[2]
Autoware
“Autoware.”https://github.com/autowarefoundation/ autoware. Accessed: 2025-09-15
2025
-
[3]
Pylot: A modular platform for exploring latency-accuracy tradeoffs in autonomous vehicles,
I. Gog, S. Kalra, P. Schafhalter, M. A. Wright, J. E. Gonzalez, and I. Stoica, “Pylot: A modular platform for exploring latency-accuracy tradeoffs in autonomous vehicles,” in2021 IEEE International Con- ference on Robotics and Automation (ICRA), pp. 8806–8813, IEEE
-
[4]
Survey on cooperative perception in an automotive context,
A. Caillot, S. Ouerghi, P. Vasseur, R. Boutteau, and Y . Dupuis, “Survey on cooperative perception in an automotive context,”IEEE Transactions on Intelligent Transportation Systems, vol. 23, no. 9, pp. 14204–14223, 2022
2022
-
[5]
Coopernaut: End-to- end driving with cooperative perception for networked vehicles,
J. Cui, H. Qiu, D. Chen, P. Stone, and Y . Zhu, “Coopernaut: End-to- end driving with cooperative perception for networked vehicles,” in Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pp. 17252–17262, 2022
2022
-
[6]
V2v-based synchronous intersection pro- tocols for mixed traffic of human-driven and self-driving vehicles,
S. Aoki and R. Rajkumar, “V2v-based synchronous intersection pro- tocols for mixed traffic of human-driven and self-driving vehicles,” in2019 IEEE 25th International Conference on Embedded and Real- Time Computing Systems and Applications (RTCSA), pp. 1–11, IEEE
-
[7]
A survey on road safety and traffic efficiency vehicular applications based on c-v2x technologies,
I. Soto, M. Calderon, O. Amador, and M. Urue ˜na, “A survey on road safety and traffic efficiency vehicular applications based on c-v2x technologies,”V ehicular Communications, vol. 33, p. 100428, 2022
2022
-
[8]
Modeling cooperative and au- tonomous adaptive cruise control dynamic responses using experimen- tal data,
V . Milan ´es and S. E. Shladover, “Modeling cooperative and au- tonomous adaptive cruise control dynamic responses using experimen- tal data,”Transportation Research Part C: Emerging Technologies, vol. 48, pp. 285–300, 2014
2014
-
[9]
Ultralytics yolo11,
G. Jocher and J. Qiu, “Ultralytics yolo11,” 2024
2024
-
[10]
Multimodal motion prediction with stacked transformers,
Y . Liu, J. Zhang, L. Fang, Q. Jiang, and B. Zhou, “Multimodal motion prediction with stacked transformers,” inProceedings of the IEEE/CVF CVPR, pp. 7577–7586, 2021
2021
-
[11]
Jalad: Joint accuracy-and latency-aware deep structure decoupling for edge-cloud execution,
H. Li, C. Hu, J. Jiang, Z. Wang, Y . Wen, and W. Zhu, “Jalad: Joint accuracy-and latency-aware deep structure decoupling for edge-cloud execution,” in2018 IEEE 24th international conference on parallel and distributed systems (ICPADS), pp. 671–678, IEEE, 2018
2018
-
[12]
Application- centric network management-addressing safety and real-time in v2x applications,
R. Ernst, D. St ¨ohrmann, A. Bendrick, and A. Kostrzewa, “Application- centric network management-addressing safety and real-time in v2x applications,”ACM Transactions on Embedded Computing Systems, vol. 22, no. 2, pp. 1–25, 2023
2023
-
[13]
OpenCDA: An open cooperative driving automation framework integrated with co-simulation,
R. Xu, Y . Guo, X. Han, X. Xia, H. Xiang, and J. Ma, “OpenCDA: An open cooperative driving automation framework integrated with co-simulation,” inProceedings of the IEEE International Conference on Intelligent Transportation Systems (ITSC), pp. 1155–1162, 2021
2021
-
[14]
M. U. Ahmad, A. Abrar, S. Dasgupta, and M. Rahman, “Opencams: An open-source connected and automated mobility co-simulation plat- form for advancing next-generation intelligent transportation systems research,”arXiv preprint arXiv:2507.09186, 2025
arXiv 2025
-
[15]
Plexe: A platooning extension for veins,
M. Segata, S. Joerer, B. Bloessl, C. Sommer, F. Dressler, and R. L. Cigno, “Plexe: A platooning extension for veins,” in2014 IEEE V ehicular Networking Conference (VNC), pp. 53–60, IEEE, 2014
2014
-
[16]
Modeling an its management solution for mixed highway traffic with eclipse mosaic,
K. Schrab, M. Neubauer, R. Protzmann, I. Radusch, S. Manganiaris, P. Lytrivis, and A. J. Amditis, “Modeling an its management solution for mixed highway traffic with eclipse mosaic,”IEEE Transactions on Intelligent Transportation Systems, vol. 24, pp. 6575–6585, 2022
2022
-
[17]
Towards collaborative autonomous driving: Simulation platform and end-to-end system,
G. Liu, Y . Hu, C. Xu, W. Mao, J. Ge, Z. Huang, Y . Lu, Y . Xu, J. Xia, Y . Wang,et al., “Towards collaborative autonomous driving: Simulation platform and end-to-end system,”IEEE Transactions on Pattern Analysis and Machine Intelligence, 2025
2025
-
[18]
Van3twin: the multi-technology v2x digital twin with ray-tracing in the loop,
R. Pegurri, D. Gasco, F. Linsalata, M. Rapelli, E. Moro, F. Raviglione, and C. Casetti, “Van3twin: the multi-technology v2x digital twin with ray-tracing in the loop,”arXiv preprint arXiv:2505.14184, 2025
Pith/arXiv arXiv 2025
-
[19]
Model predictive control: Theory and practice—a survey,
C. E. Garcia, D. M. Prett, and M. Morari, “Model predictive control: Theory and practice—a survey,”Automatica, vol. 25, no. 3, pp. 335– 348, 1989
1989
-
[20]
Mininet-wifi: Emulating software-defined wireless net- works,
R. R. Fontes, S. Afzal, S. H. Brito, M. A. Santos, and C. E. Rothenberg, “Mininet-wifi: Emulating software-defined wireless net- works,” in2015 11th International conference on network and service management (CNSM), pp. 384–389, IEEE, 2015
2015
-
[21]
The impact of coop- erative adaptive cruise control on traffic-flow characteristics,
B. van Arem, C. J. van Driel, and R. Visser, “The impact of coop- erative adaptive cruise control on traffic-flow characteristics,”IEEE Transactions on Intelligent Transportation Systems, vol. 7, 2006
2006
-
[22]
Platoons of connected vehicles can double throughput in urban roads,
J. Lioris, R. Pedarsani, F. Y . Tascikaraoglu, and P. Varaiya, “Platoons of connected vehicles can double throughput in urban roads,”Trans- portation Research Part C: Emerging Technologies, vol. 77, 2017
2017
-
[23]
V2X cooperative perception for autonomous driving: Recent advances and challenges,
D. C. Nguyen, M. R. Azghadi, Y . Xia, Q.-L. Han, and S. Sun, “V2X cooperative perception for autonomous driving: Recent advances and challenges,”arXiv preprint arXiv:2310.03525, 2024
arXiv 2024
-
[24]
Cooperative collision warning using dedicated short range wireless communications,
T. ElBatt, S. K. Goel, G. Holland, H. Krishnan, and J. Parikh, “Cooperative collision warning using dedicated short range wireless communications,” inProceedings of the 3rd ACM International Work- shop on V ehicular Ad Hoc Networks (VANET), pp. 1–9, 2006
2006
-
[25]
V2X-ViT: Vehicle-to-everything cooperative perception with vision transformer,
R. Xu, H. Xiang, Z. Tu, X. Xia, M.-H. Yang, and J. Ma, “V2X-ViT: Vehicle-to-everything cooperative perception with vision transformer,” inProceedings of the European Conference on Computer Vision (ECCV), pp. 107–124, 2022
2022
-
[26]
Impact of delays and computation placement on sense-act application performance in iot,
P. Sharma and M. B. Srivastava, “Impact of delays and computation placement on sense-act application performance in iot,” inMILCOM 2023-2023 IEEE Military Communications Conference (MILCOM), pp. 133–138, IEEE, 2023
2023
-
[27]
Towards a performance-driven device-edge-cloud relationship,
P. Sharma, B. Wang, X. Ouyang, R. Nanayakkara, B. Balaji, P. Tabuada, and M. B. Srivastava, “Towards a performance-driven device-edge-cloud relationship,” inProceedings of the 26th Interna- tional Workshop on Mobile Computing Systems and Applications, pp. 125–125, 2025
2025
-
[28]
Cloud is closer than it appears: Revisiting the tradeoffs of distributed real-time inference,
P. Sharma, H. Qiu, and M. Srivastava, “Cloud is closer than it appears: Revisiting the tradeoffs of distributed real-time inference,” in2025 34th International Conference on Computer Communications and Networks (ICCCN), pp. 1–9, IEEE, 2025
2025
-
[29]
Veins: The open source vehicular network simulation framework,
C. Sommer, D. Eckhoff, A. Brummer, D. S. Buse, F. Hagenauer, S. Joerer, and M. Segata, “Veins: The open source vehicular network simulation framework,” inRecent advances in network simulation: the OMNeT++ environment and its ecosystem, Springer, 2019
2019
-
[30]
Carla: An open urban driving simulator,
A. Dosovitskiy, G. Ros, F. Codevilla, A. Lopez, and V . Koltun, “Carla: An open urban driving simulator,” inConference on robot learning, pp. 1–16, PMLR, 2017
2017
-
[31]
Scalability in perception for autonomous driving: Waymo open dataset,
P. Sun, H. Kretzschmar, X. Dotiwalla, A. Chouard, V . Patnaik, P. Tsui, J. Guo, Y . Zhou, Y . Chai, B. Caine,et al., “Scalability in perception for autonomous driving: Waymo open dataset,” inProceedings of the IEEE/CVF conference on computer vision and pattern recognition, pp. 2446–2454, 2020
2020
-
[32]
Microsoft coco: Common objects in context,
T.-Y . Lin, M. Maire, S. Belongie, J. Hays, P. Perona, D. Ramanan, P. Doll ´ar, and C. L. Zitnick, “Microsoft coco: Common objects in context,” inEuropean conference on computer vision, pp. 740–755, Springer, 2014
2014
-
[33]
J. Bai, S. Bai, Y . Chu, Z. Cui, K. Dang, X. Deng, Y . Fan, W. Ge, Y . Han, F. Huang,et al., “Qwen technical report,”arXiv preprint arXiv:2309.16609, 2023
Pith/arXiv arXiv 2023
-
[34]
Llama: Open and efficient foundation language models,
H. Touvron, T. Lavril, G. Izacard, X. Martinet, M.-A. Lachaux, T. Lacroix, B. Rozi`ere, N. Goyal, E. Hambro, F. Azhar,et al., “Llama: Open and efficient foundation language models,”arXiv preprint arXiv:2302.13971, 2023
Pith/arXiv arXiv 2023
-
[35]
The websocket protocol,
I. Fette and A. Melnikov, “The websocket protocol,” tech. rep., 2011
2011
-
[36]
End-to-end v2x latency modeling and analysis in 5g networks,
B. Coll-Perales, M. C. Lucas-Esta ˜n, T. Shimizu, J. Gozalvez, T. Higuchi, S. Avedisov, O. Altintas, and M. Sepulcre, “End-to-end v2x latency modeling and analysis in 5g networks,”IEEE Transactions on V ehicular Technology, vol. 72, no. 4, pp. 5094–5109, 2022
2022
-
[37]
D. L. Mills,Computer network time synchronization: the network time protocol. CRC press, 2006
2006
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.