Astro, I'm Home! Investigating Factors that Influence the Acceptance of Home Robots Using Supervised Machine Learning
Pith reviewed 2026-06-30 16:45 UTC · model grok-4.3
The pith
Performance expectancy, social influence, and hedonic motivation best predict intention to use home social robots in the UTAUT2 framework.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
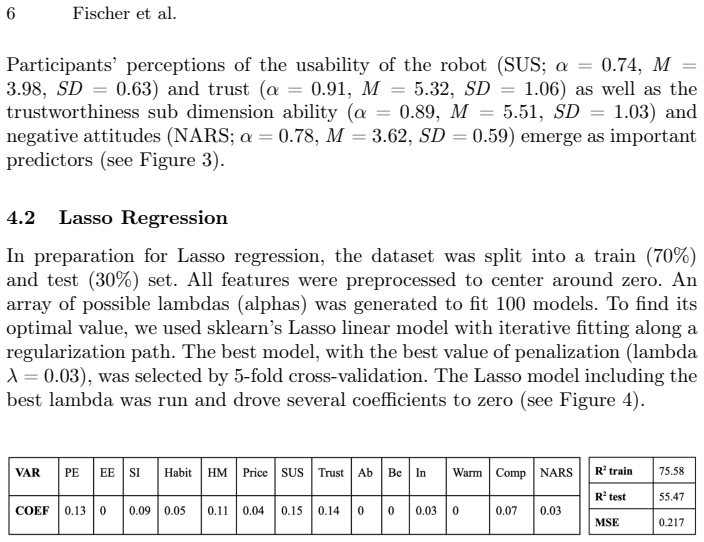
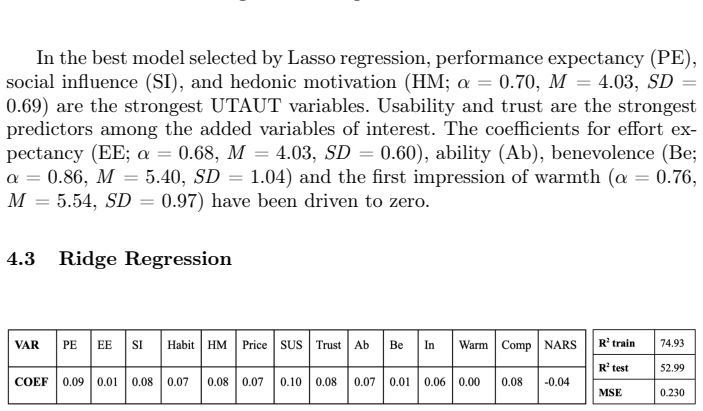
Within the original UTAUT2 framework, performance expectancy, social influence, and hedonic motivation emerged as the strongest and most consistent predictors of intention to use the technology. In addition, usability, trust, and competence were identified as promising variables in a model predicting intention to use.
What carries the argument
Regularization techniques (Lasso and Ridge regression) applied to UTAUT2 survey responses to isolate the strongest predictors of intention to use home robots.
If this is right
- Designers should emphasize clear performance benefits when developing home robots.
- Social proof and enjoyment features should receive priority in product positioning.
- Future acceptance models for home robots should incorporate usability, trust, and competence alongside the core UTAUT2 constructs.
- Regularization methods can help identify the most relevant variables when extending technology-acceptance frameworks to new device categories.
Where Pith is reading between the lines
- If the identified predictors generalize, marketing campaigns could focus on demonstrating task performance and fun rather than technical specifications alone.
- The same analysis approach could be applied to other emerging home technologies such as smart appliances to test whether the same three UTAUT2 factors dominate.
- Real deployment trials that replace self-reported intention with logged usage data would provide a direct test of whether the survey-based predictors hold outside laboratory conditions.
Load-bearing premise
The survey responses accurately reflect real future behavior and the sample represents typical potential home-robot users without major bias.
What would settle it
A follow-up study that measures the same predictors then tracks whether participants actually buy or regularly use a home robot would falsify the claim if the measured predictors show no relation to observed adoption.
Figures
read the original abstract
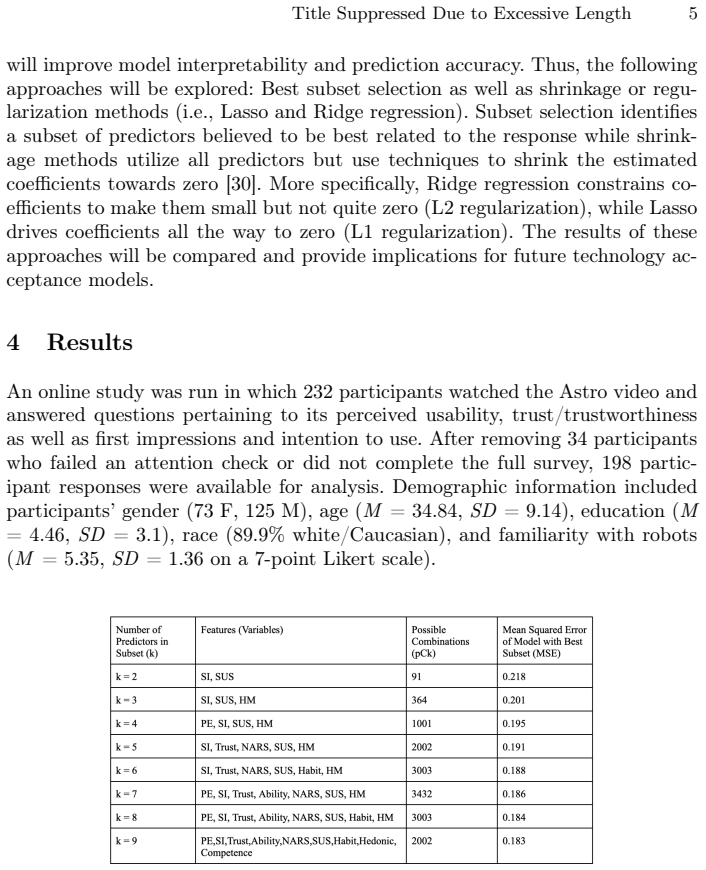
The use of social robots in home environments is on the rise. This exploratory study applies regularization techniques (e.g., Lasso and Ridge regression) to investigate variables and identify new models of technology acceptance in the context of social robots. Within the original UTAUT2 framework, performance expectancy, social influence, and hedonic motivation emerged as the strongest and most consistent predictors of intention to use the technology. In addition, usability, trust, and competence were identified as promising variables in a model predicting intention to use.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript reports an exploratory study applying Lasso and Ridge regression to UTAUT2-based survey data (extended with usability, trust, and competence items) to identify predictors of intention to use home social robots. It concludes that performance expectancy, social influence, and hedonic motivation are the strongest and most consistent predictors within the original framework, while usability, trust, and competence emerge as promising additional variables.
Significance. If the regression results prove robust, the work offers a data-driven extension of UTAUT2 to the domain of home social robots and illustrates how regularization can manage multicollinearity in acceptance surveys. The explicit use of supervised ML for variable selection is a methodological strength that could be replicated in related technology-acceptance studies.
major comments (2)
- [Methods] Methods: the manuscript does not report the survey sample size or demographic composition, which is load-bearing for evaluating whether the identified predictors (performance expectancy, social influence, hedonic motivation) are stable or sensitive to small-n artifacts.
- [Analysis] Analysis/Results: no description is given of the procedure for selecting the regularization parameter lambda (cross-validation folds, grid search, or stability selection), nor are coefficient stability metrics or out-of-sample error rates provided; without these the claim that certain variables are 'strongest and most consistent' cannot be assessed.
minor comments (1)
- [Abstract] Abstract: adding one sentence on sample size and validation approach would allow readers to gauge the strength of the reported predictors without consulting the full text.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our exploratory study. We address each major comment below and indicate the revisions that will be incorporated.
read point-by-point responses
-
Referee: [Methods] Methods: the manuscript does not report the survey sample size or demographic composition, which is load-bearing for evaluating whether the identified predictors (performance expectancy, social influence, hedonic motivation) are stable or sensitive to small-n artifacts.
Authors: We agree that the sample size and demographic composition are necessary to assess the stability of the identified predictors. In the revised manuscript we will add a dedicated subsection in the Methods reporting the exact survey sample size and a full demographic breakdown of respondents. revision: yes
-
Referee: [Analysis] Analysis/Results: no description is given of the procedure for selecting the regularization parameter lambda (cross-validation folds, grid search, or stability selection), nor are coefficient stability metrics or out-of-sample error rates provided; without these the claim that certain variables are 'strongest and most consistent' cannot be assessed.
Authors: We acknowledge that explicit details on lambda selection and supporting metrics are required to substantiate the claims. The revised manuscript will describe the cross-validation procedure used to select lambda and will report coefficient stability metrics together with out-of-sample error rates. revision: yes
Circularity Check
No significant circularity
full rationale
The paper performs exploratory regularized regression (Lasso/Ridge) on survey responses to identify which UTAUT2 constructs and extensions best predict intention to use. Reported predictors are direct outputs of coefficient shrinkage on the collected data; no equation or claim reduces a result to its own inputs by definition, no self-citation chain is load-bearing, and no fitted parameter is relabeled as an independent prediction. The analysis is therefore self-contained empirical modeling.
Axiom & Free-Parameter Ledger
free parameters (1)
- Regularization parameter lambda
axioms (1)
- domain assumption UTAUT2 constructs validly and reliably measure technology acceptance factors for social robots
Reference graph
Works this paper leans on
-
[1]
Organizational behavior and human decision processes50(2), 179–211 (1991)
Ajzen, I.: The theory of planned behavior. Organizational behavior and human decision processes50(2), 179–211 (1991)
1991
-
[2]
ECS Transactions107(1), 12389 (2022)
Alam, A.: Social robots in education for long-term human-robot interaction: so- cially supportive behaviour of robotic tutor for creating robo-tangible learning environment in a guided discovery learning interaction. ECS Transactions107(1), 12389 (2022)
2022
-
[3]
Alenljung, B., Lindblom, J.: User experience of socially interactive robots: its role and relevance, pp. 352–364. IGI Global (2015)
2015
-
[4]
https://doi.org/10.1007/s12369-022-00957-z
Apraiz, A., Lasa, G., Mazmela, M.: Evaluation of user experience in human–robot interaction:Asystematicliteraturereview.InternationalJournalofSocialRobotics 15, 187–210 (2023). https://doi.org/10.1007/s12369-022-00957-z
-
[5]
Frontiers in Neurorobotics16, 1–11 (2022)
Bevilacqua, R., Rosa, M.D., Riccardi, G.R., Pelliccioni, G., Lattanzio, F., Felici, E., Margaritini, A., Amabili, G., Maranesi, E.: Design and develop- ment of a scale for valuating the acceptance of social robotics for older peo- ple: The robot era inventory. Frontiers in Neurorobotics16, 1–11 (2022). https://doi.org/10.3389/fnbot.2022.883106
-
[6]
Usability evaluation in industry189(194), 4–7 (1996)
Brooke, J., et al.: Sus-a quick and dirty usability scale. Usability evaluation in industry189(194), 4–7 (1996)
1996
-
[7]
MIS quarterly pp
Brown, S.A., Venkatesh, V.: Model of adoption of technology in households: A baseline model test and extension incorporating household life cycle. MIS quarterly pp. 399–426 (2005)
2005
-
[8]
Journal the WINNERS13(2), 10–114 (2012)
Chang, A.: Utaut and utaut 2: A review and agenda for future research. Journal the WINNERS13(2), 10–114 (2012)
2012
-
[9]
Computers & Education150, 103836 (2020)
Chen, H., Park, H.W., Breazeal, C.: Teaching and learning with children: Impact of reciprocal peer learning with a social robot on children’s learning and emotive engagement. Computers & Education150, 103836 (2020)
2020
-
[10]
Assistive Technology 29(1), 8–18 (2017)
Chu, M.T., Khosla, R., Khaksar, S.M.S., Nguyen, K.: Service innovation through social robot engagement to improve dementia care quality. Assistive Technology 29(1), 8–18 (2017)
2017
-
[11]
MIS quarterly pp
Compeau, D., Higgins, C.A., Huff, S.: Social cognitive theory and individual reac- tions to computing technology: A longitudinal study. MIS quarterly pp. 145–158 (1999) Title Suppressed Due to Excessive Length 9
1999
-
[12]
Journal of personality and social psychology92(4), 631 (2007)
Cuddy, A.J., Fiske, S.T., Glick, P.: The bias map: behaviors from intergroup affect and stereotypes. Journal of personality and social psychology92(4), 631 (2007). https://doi.org/10.1037/0022-3514.92.4.631
-
[13]
Davis, F.D.: Perceived usefulness, perceived ease of use, and user ac- ceptance of information technology. MIS quarterly pp. 319–340 (1989). https://doi.org/10.2307/249008
-
[14]
Journal of applied social psychology22(14), 1111–1132 (1992)
Davis, F.D., Bagozzi, R.P., Warshaw, P.R.: Extrinsic and intrinsic motivation to use computers in the workplace 1. Journal of applied social psychology22(14), 1111–1132 (1992)
1992
-
[15]
Procedia computer science156, 185–193 (2019)
Deeva, I.: Computational personality prediction based on digital footprint of a social media user. Procedia computer science156, 185–193 (2019)
2019
-
[16]
International Journal of Accounting Information Systems11(1), 61–77 (2010)
Diaz, M.C., Loraas, T.: Learning new uses of technology while on an audit en- gagement: Contextualizing general models to advance pragmatic understanding. International Journal of Accounting Information Systems11(1), 61–77 (2010). https://doi.org/10.1016/j.accinf.2009.05.001
-
[17]
Communica- tions of the ACM55(10), 78–87 (2012)
Domingos, P.: A few useful things to know about machine learning. Communica- tions of the ACM55(10), 78–87 (2012)
2012
-
[18]
Electronic Government, an International Journal10(3-4), 343– 360 (2013)
Faaeq, M.K., Ismail, N.A., Osman, W.R.S., Al-Swidi, A.K., Faieq, A.K.: A meta– analysis of the unified theory of acceptance and use of technology studies among several countries. Electronic Government, an International Journal10(3-4), 343– 360 (2013)
2013
-
[19]
Fischer, K., Kim, D., Hong, J.W.: The effect of trust and its antecedents on robot acceptance. In: 32nd IEEE International Conference on Robot & Human Interactive Communication (RO-MAN), SCRITA Workshop on Trust, Acceptance and Social Cues in Human-Robot Interaction (2023). https://doi.org/10.48550/arXiv.2311.06688
-
[20]
Fischer,K.,Kim,D.,Hong,J.W.:Whatmakespeopleusesocialrobots?Integrating trustworthiness into the UTAUT model. In: Degen, H., Ntoa, S. (eds.) Artificial Intelligence in HCI. HCII 2025. Lecture Notes in Computer Science. vol. 15819, pp. 67–85. Springer, Cham. (2025). https://doi.org/10.1007/978-3-031-93412-4_4
-
[21]
Philosophy and Rhetoric (1977)
Fishbein, M., Ajzen, I.: Belief, attitude, intention, and behavior: An introduction to theory and research. Philosophy and Rhetoric (1977)
1977
-
[22]
Trends in Cognitive Sciences11, 77–83 (2 2007)
Fiske, S.T., Cuddy, A.J., Glick, P.: Universal dimensions of social cognition: Warmth and competence. Trends in Cognitive Sciences11, 77–83 (2 2007). https://doi.org/10.1016/J.TICS.2006.11.005
-
[23]
Computers in Human Behavior33, 23– 31 (2014)
Fridin, M., Belokopytov, M.: Acceptance of socially assistive humanoid robot by preschool and elementary school teachers. Computers in Human Behavior33, 23– 31 (2014)
2014
-
[24]
Human Autonomy and Sense of Agency in Human-Robot Interaction: A Systematic Literature Review
Glawe, F., Schmeckel, T., Brauner, P., Ziefle, M.: Human autonomy and sense of agency in human-robot interaction: A systematic literature review. arXiv preprint arXiv:2509.22271 (2025)
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[25]
Applied Sciences11(13), 5976 (2021)
González-González, C.S., Violant-Holz, V., Gil-Iranzo, R.M.: Social robots in hos- pitals: a systematic review. Applied Sciences11(13), 5976 (2021)
2021
-
[26]
BMC Medical Informatics and Decision Making22, 1–9 (2022)
Hajesmaeel-Gohari, S., Khordastan, F., Fatehi, F., Samzadeh, H., Bahaadinbeigy, K.: The most used questionnaires for evaluating satisfaction, usability, acceptance, and quality outcomes of mobile health. BMC Medical Informatics and Decision Making22, 1–9 (2022). https://doi.org/10.1186/s12911-022-01764-2
-
[27]
Human factors53(5), 517–527 (2011) 10 Fischer et al
Hancock, P.A., Billings, D.R., Schaefer, K.E., Chen, J.Y.C., De Visser, E.J., Para- suraman, R.: A meta-analysis of factors affecting trust in human-robot interaction. Human factors53(5), 517–527 (2011) 10 Fischer et al
2011
-
[28]
Behaviour and Information Technology25, 91–97 (2006)
Hassenzahl, M., Tractinsky, N.: User experience - a research agenda. Behaviour and Information Technology25, 91–97 (2006). https://doi.org/10.1080/01449290500330331
-
[29]
In: ROMAN 2006-The 15th IEEE Interna- tional Symposium on Robot and Human Interactive Communication
Heerink, M., Krose, B., Evers, V., Wielinga, B.: The influence of a robot’s social abilities on acceptance by elderly users. In: ROMAN 2006-The 15th IEEE Interna- tional Symposium on Robot and Human Interactive Communication. pp. 521–526 (2006)
2006
-
[30]
Springer (2013)
James, G., Witten, D., Hastie, T., Tibshirani, R.: An introduction to statistical learning: with applications in R. Springer (2013)
2013
-
[31]
Ethics and Information Technology23(Suppl 1), 35–43 (2021)
Jecker, N.S.: You’ve got a friend in me: sociable robots for older adults in an age of global pandemics. Ethics and Information Technology23(Suppl 1), 35–43 (2021)
2021
-
[32]
Ethics107(1), 4–25 (1996)
Jones, K.: Trust as an affective attitude. Ethics107(1), 4–25 (1996)
1996
-
[33]
Applied Sciences11, 1–18 (2021)
Jung, M., Lazaro, M.J.S., Yun, M.H.: Evaluation of methodologies and measures on the usability of social robots: A systematic review. Applied Sciences11, 1–18 (2021). https://doi.org/10.3390/app11041388
-
[34]
Kim, W., Kim, N., Lyons, J.B., Nam, C.S.: Factors affecting trust in high-vulnerability human-robot interaction contexts: A struc- tural equation modelling approach. Applied Ergonomics85(5 2020). https://doi.org/10.1016/j.apergo.2020.103056
-
[35]
Conference on Human Factors in Computing Systems - Proceedings pp
Lewis, C., Poison, P., Wharton, C., Rieman, J.: Testing a walkthrough method- ology for theory-based design of walk-up-and-use interfaces. Conference on Human Factors in Computing Systems - Proceedings pp. 235–242 (1990). https://doi.org/10.1145/97243.97279
-
[36]
Li, S., Liu, Y.: How can smart service robot help the elderly aging in place: Ap- plication, prospect and preference. In: Proceedings of the 2022 IEEE International Conference on Internet of Things and Intelligence Systems (IoTaIS). pp. 395–401. IEEE (2022). https://doi.org/10.1109/IoTaIS56727.2022.9976005
-
[37]
MIS quarterly pp
Limayem, M., Hirt, S.G., Cheung, C.M.: How habit limits the predictive power of intention: The case of information systems continuance. MIS quarterly pp. 705–737 (2007)
2007
-
[38]
Information systems research2(3), 192–222 (1991)
Moore, G.C., Benbasat, I.: Development of an instrument to measure the per- ceptions of adopting an information technology innovation. Information systems research2(3), 192–222 (1991)
1991
-
[39]
(eds.): Trust in human-robot interaction: Research and appli- cations
Nam, C., Lyons, J. (eds.): Trust in human-robot interaction: Research and appli- cations. Elsevier (2020)
2020
-
[40]
International Journal of Social Robotics12, 1179–1201 (dec 2020)
Naneva, S., Sarda Gou, M., Webb, T.L., Prescott, T.J.: A systematic review of at- titudes, anxiety, acceptance, and trust towards social robots. International Journal of Social Robotics12, 1179–1201 (dec 2020). https://doi.org/10.1007/s12369-020- 00659-4
-
[41]
AI and Society20, 138–150 (3 2006)
Nomura, T., Kanda, T., Suzuki, T.: Experimental investigation into influence of negative attitudes toward robots on human-robot interaction. AI and Society20, 138–150 (3 2006). https://doi.org/10.1007/s00146-005-0012-7
-
[42]
Rossi, S., Conti, D., Garramone, F., Santangelo, G., Staffa, M., Varrasi, S., Nuovo, A.D.: The role of personality factors and empathy in the acceptance and perfor- mance of a social robot for psychometric evaluations. Robotics9, 1–19 (2020). https://doi.org/10.3390/robotics9020039
-
[43]
Emerging Policy and Ethics of Human-Robot Interaction (2015) Title Suppressed Due to Excessive Length 11
Salem, M., Dautenhahn, K.: Evaluating trust and safety in HRI: Practical issues and ethical challenges. Emerging Policy and Ethics of Human-Robot Interaction (2015) Title Suppressed Due to Excessive Length 11
2015
-
[44]
In: Proceedings of the Tenth Annual ACM/IEEE Inter- national Conference on Human-Robot Interaction
Salem, M., Lakatos, G., Amirabdollahian, F., Dautenhahn, K.: Would you trust a (faulty) robot?: Effects of error, task type and personality on human-robot cooperation and trust. In: Proceedings of the Tenth Annual ACM/IEEE Inter- national Conference on Human-Robot Interaction. pp. 141–148. ACM (2015). https://doi.org/10.1145/2696454.2696497
-
[45]
International journal of social robotics2(4), 451–460 (2010)
Salvini, P., Laschi, C., Dario, P.: Design for acceptability: improving robots’ co- existence in human society. International journal of social robotics2(4), 451–460 (2010)
2010
-
[46]
Computers in human behavior25(6), 1343–1354 (2009)
Shin, D.H.: Towards an understanding of the consumer acceptance of mobile wallet. Computers in human behavior25(6), 1343–1354 (2009). https://doi.org/10.1016/j.chb.2009.06.001
-
[47]
Shourmasti, E.S., Colomo-Palacios, R., Holone, H., Demi, S.: User experience in social robots. Sensors21, 1–19 (2021). https://doi.org/10.3390/s21155052
-
[48]
Information systems research6(2), 144–176 (1995)
Taylor, S., Todd, P.A.: Understanding information technology usage: A test of competing models. Information systems research6(2), 144–176 (1995)
1995
-
[49]
The Business Research Company: Social robots global market report (2025), https://www.thebusinessresearchcompany.com/report/social-robots-global- market-report
2025
-
[50]
MIS quarterly pp
Thompson, R.L., Higgins, C.A., Howell, J.M.: Personal computing: Toward a con- ceptual model of utilization. MIS quarterly pp. 125–143 (1991)
1991
-
[51]
MIS Quarterly: Management Information Systems27, 425–478 (2003)
Venkatesh, V., Morris, M.G., Davis, G.B., Davis, F.D.: User acceptance of informa- tion technology: Toward a unified view. MIS Quarterly: Management Information Systems27, 425–478 (2003). https://doi.org/10.2307/30036540
-
[52]
MIS Quarterly: Management Information Systems36, 157–178 (2012)
Venkatesh, V., Thong, J.Y., Xu, X.: Consumer acceptance and use of informa- tion technology: Extending the unified theory of acceptance and use of tech- nology. MIS Quarterly: Management Information Systems36, 157–178 (2012). https://doi.org/10.2307/41410412
-
[53]
Communications of the ACM61, 42–44 (2018)
Wallach, H.: Viewpoint: computational social science̸=computer sci- ence + social data. Communications of the ACM61, 42–44 (2018). https://doi.org/10.1145/3132698
-
[54]
Washburn,A.,Shrestha,K.,Ahmed,H.,Feil-Seifer,D.,La,H.M.:Exploringhuman compliance toward a package delivery robot. In: Proceedings of the 2022 IEEE InternationalConferenceonHuman-MachineSystems,ICHMS2022.pp.1–6.IEEE (2022). https://doi.org/10.1109/ICHMS56717.2022.9980806
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.