Geometry-Guided Modeling of Foundation Features Enables Generalizable Object Shape Deformation Learning
Pith reviewed 2026-06-29 08:40 UTC · model grok-4.3
The pith
Enriching foundation features with category template topology enables generalizable 3D shape deformation from single images.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
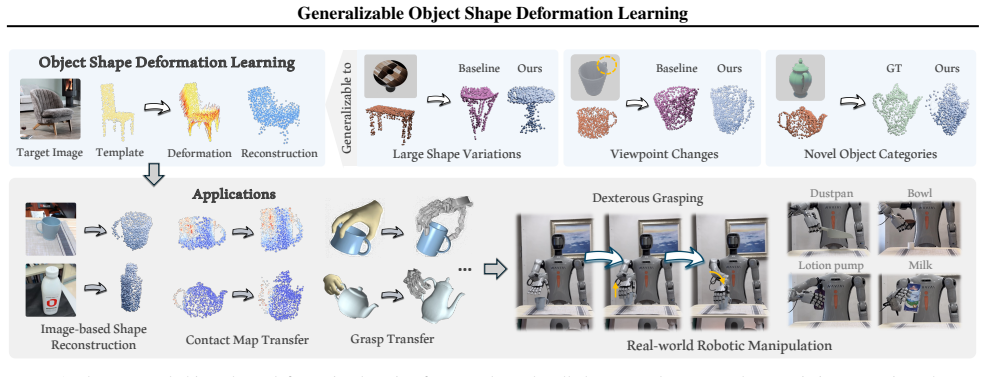
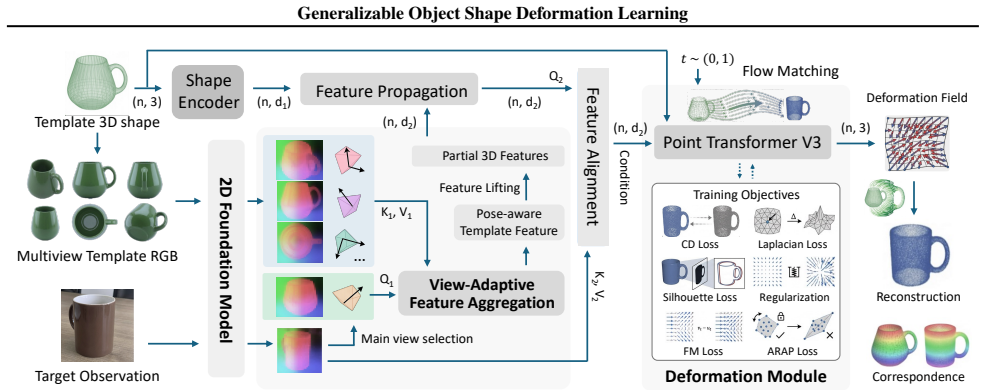
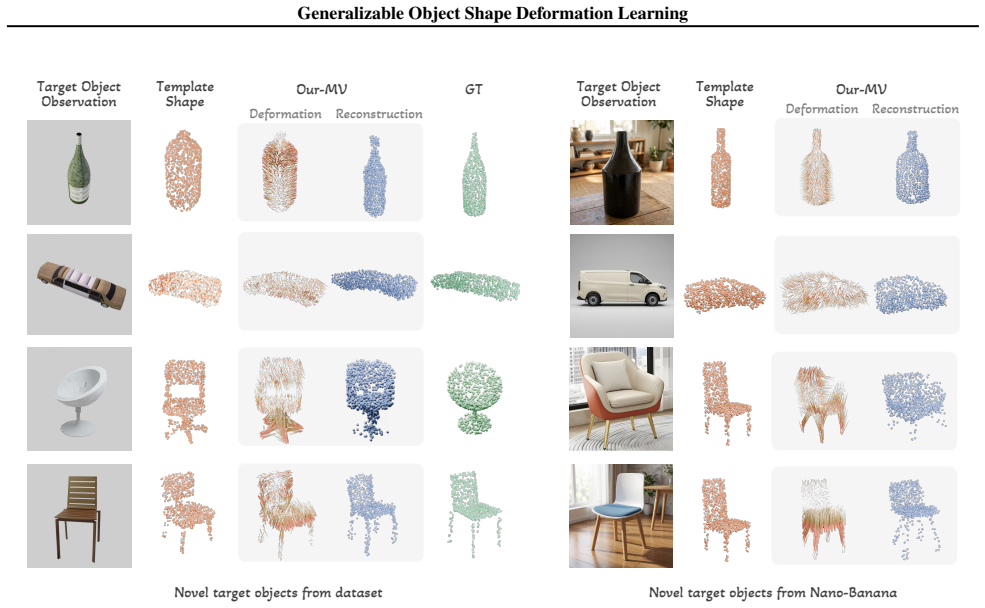
By modeling foundation features in a geometry-guided way that incorporates the topology of a category-level shape template and aggregating those features adaptively across views, the method learns to deform the template to match arbitrary target observations, achieving generalization to novel categories and viewpoints.
What carries the argument
The geometry-guided feature modeling mechanism, which enriches foundation features with template topology to create a geometry-aware representation that guides deformation.
If this is right
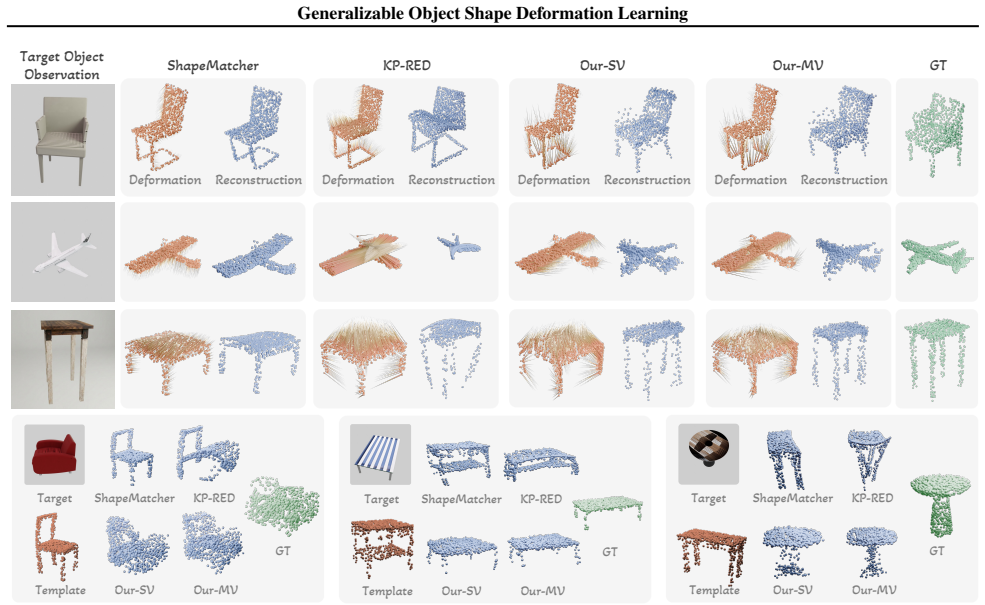
- The framework outperforms existing methods on large shape variations and diverse viewpoints.
- It generalizes effectively to unseen object categories.
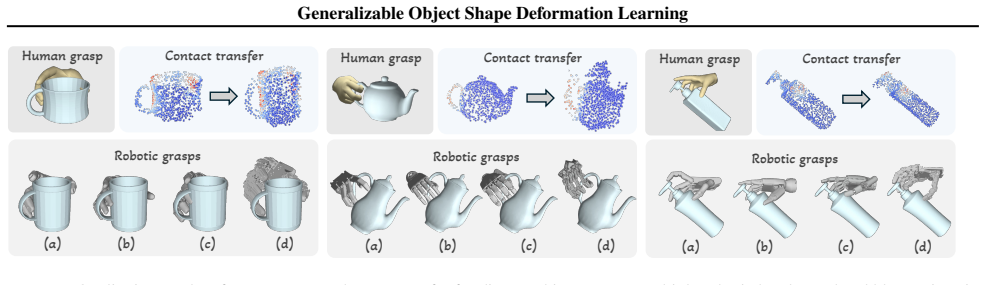
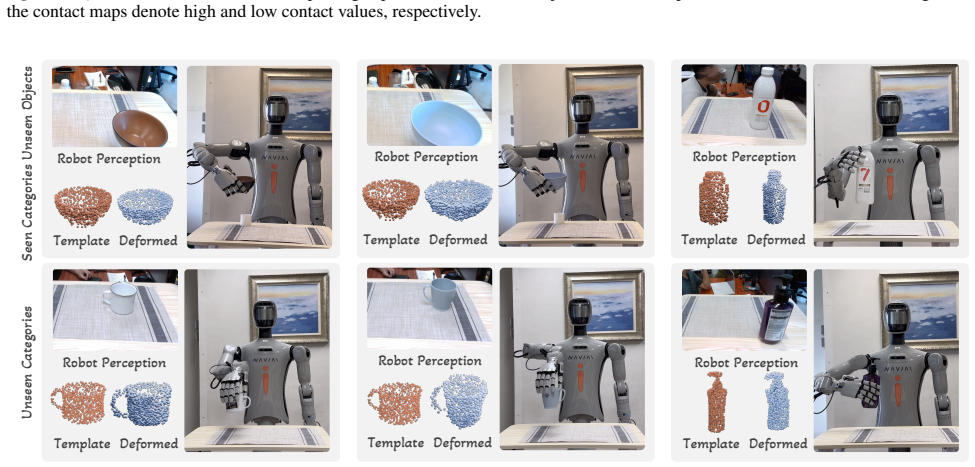
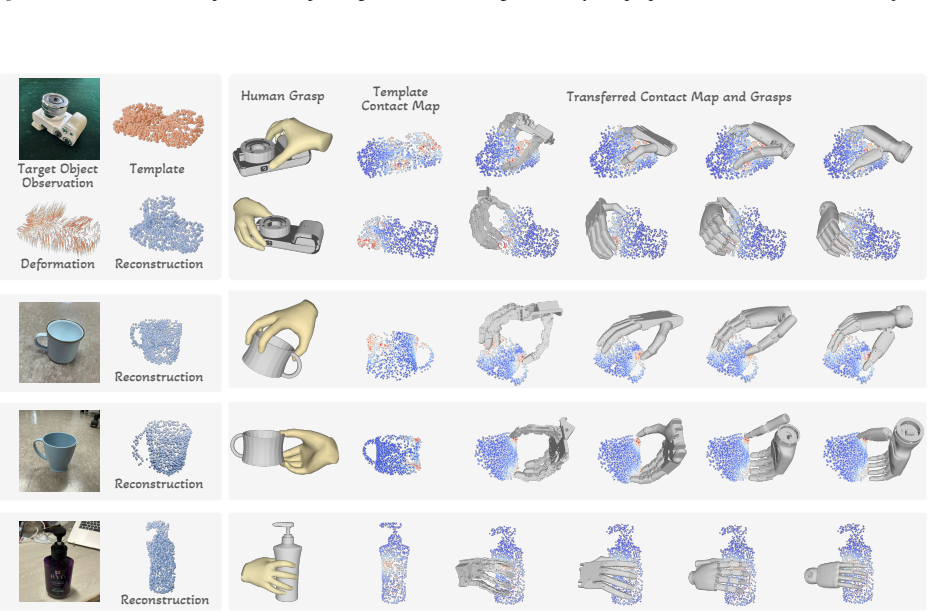
- It supports real-world dexterous robotic manipulation tasks.
Where Pith is reading between the lines
- This suggests template-based deformation can serve as a bridge between fixed priors and flexible foundation models in 3D vision.
- Future work might test whether the same enrichment process applies to non-rigid or articulated objects without category templates.
Load-bearing premise
A suitable category-level shape template must exist, and enriching foundation features with its topology must produce a representation that guides accurate deformation for any target view or unseen category.
What would settle it
Demonstrating that deformation fails to match the target shape when the category template topology does not align with the observed object's structure, or when the target view differs substantially from the aggregated template views.
Figures
read the original abstract
Monocular 3D shape recovery is fundamental to geometric understanding, yet achieving robust generalization across arbitrary viewpoints and unseen object categories remains a significant challenge. In this paper, we present a generalizable deformation learning framework that reconstructs 3D objects by explicitly deforming a category-level shape template to match the target observation. To address complex shape variations between the template and the target, we introduce a geometry-guided feature modeling mechanism. This process first enriches foundation features with template topology to yield a geometry-aware representation, which is then explicitly correlated with the target observation to guide precise deformation. Furthermore, to bridge the disparity between the fixed template and arbitrary target views, we propose a view-adaptive feature aggregation module. This module leverages multi-view template features and their corresponding camera poses to enrich the canonical template representation, ensuring robust feature alignment regardless of the target's perspective. Extensive experiments demonstrate that our approach significantly outperforms state-of-the-art methods in handling large shape variations and diverse viewpoints, exhibiting strong generalization to novel categories and effectively supporting downstream real-world dexterous robotic manipulation tasks. Project homepage: https://GODeform.github.io/
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a generalizable deformation learning framework for monocular 3D shape recovery. It reconstructs objects by deforming a category-level shape template, using a geometry-guided feature modeling mechanism that enriches foundation features with template topology and a view-adaptive feature aggregation module that incorporates multi-view template features and camera poses. The abstract claims significant outperformance over state-of-the-art methods on large shape variations and diverse viewpoints, strong generalization to novel categories, and utility for downstream dexterous robotic manipulation.
Significance. If the central claims hold after verification, the explicit incorporation of template topology into foundation features and the view-adaptive aggregation could offer a useful inductive bias for template-driven 3D deformation. However, the approach's dependence on pre-existing category-level templates for novel categories means any generalization benefit is conditional on external template provision rather than emerging purely from the learned model.
major comments (2)
- [Abstract] Abstract: performance claims of outperformance and generalization are asserted without any equations, ablation studies, error bars, dataset descriptions, or experimental protocols, rendering the central empirical claims unverifiable from the provided text.
- [Abstract] Abstract: the claim of strong generalization to novel categories rests on the assumption that suitable category-level shape templates exist and can be deformed accurately; no mechanism is described for obtaining or validating such templates independently for truly unseen categories, making the result conditional on this external input.
Simulated Author's Rebuttal
We thank the referee for the constructive comments. We address each major comment point-by-point below, drawing on details from the full manuscript.
read point-by-point responses
-
Referee: [Abstract] Abstract: performance claims of outperformance and generalization are asserted without any equations, ablation studies, error bars, dataset descriptions, or experimental protocols, rendering the central empirical claims unverifiable from the provided text.
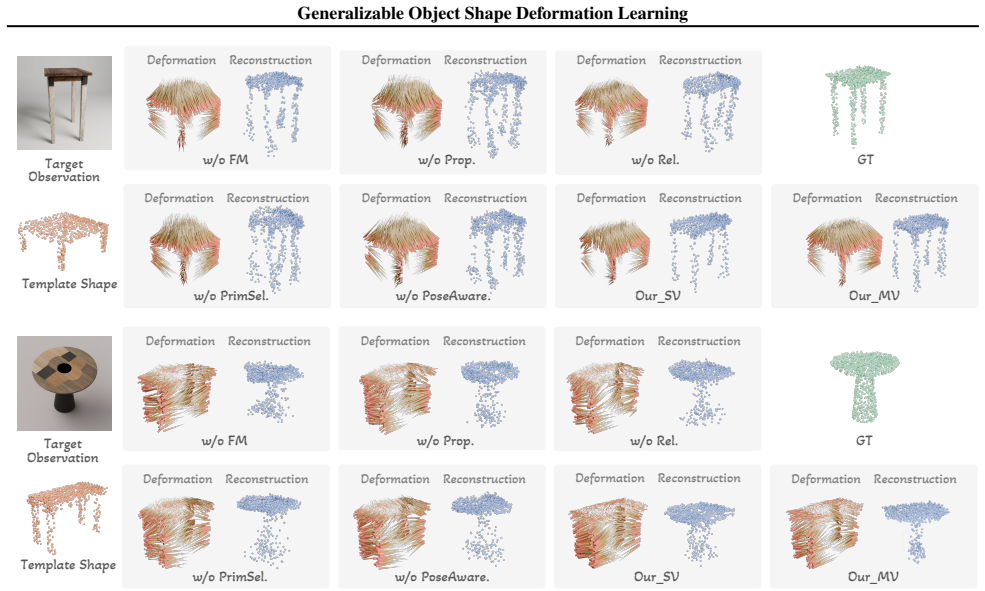
Authors: The abstract is a high-level summary by design and does not contain the full experimental details. The complete manuscript provides all requested elements: the geometry-guided feature modeling and view-adaptive aggregation equations appear in Section 3; ablation studies with quantitative results are in Section 4.3; tables include error bars (standard deviations over multiple runs); dataset descriptions (e.g., ShapeNet, real-world captures) and experimental protocols (training splits, viewpoint sampling, metrics) are specified in Sections 4.1 and 4.2. The outperformance claims are supported by direct comparisons in Tables 1-3. No changes to the abstract are required, as this structure follows standard practice for the venue. revision: no
-
Referee: [Abstract] Abstract: the claim of strong generalization to novel categories rests on the assumption that suitable category-level shape templates exist and can be deformed accurately; no mechanism is described for obtaining or validating such templates independently for truly unseen categories, making the result conditional on this external input.
Authors: The method is explicitly template-driven: a category-level shape template is an input, and the contribution lies in learning to deform it robustly via geometry-guided features and view-adaptive aggregation. Experiments in Section 4.4 demonstrate generalization to novel categories when the corresponding templates are supplied (consistent with prior template-based works). We do not claim or provide a mechanism for automatically generating or validating templates for arbitrary unseen categories, as that lies outside the paper's scope. The abstract's generalization claim is therefore conditional on template availability, which we can clarify with one additional sentence in the revised abstract or introduction. revision: partial
Circularity Check
No significant circularity detected
full rationale
The provided abstract and description contain no equations, derivations, or self-referential definitions that reduce claims to inputs by construction. The framework is presented as a methodological pipeline (template deformation + geometry-guided feature enrichment + view-adaptive aggregation) whose generalization performance is asserted via experiments rather than mathematical identities or fitted parameters renamed as predictions. No self-citation load-bearing steps, uniqueness theorems, or ansatzes are quoted. The category-level template assumption is an external modeling choice, not a circular reduction within the paper's own chain.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
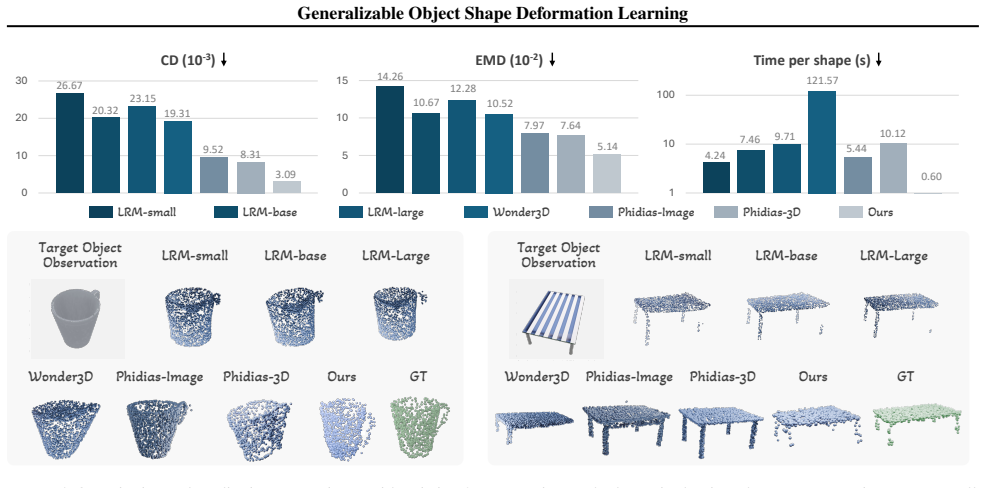
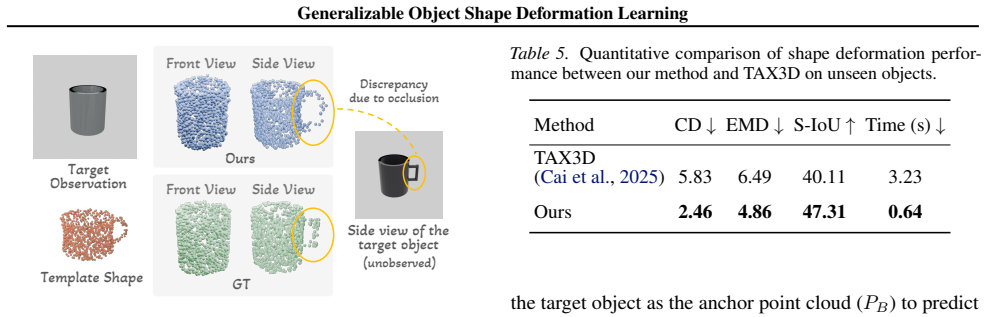
Lower CD values indicate better surface alignment.Earth Mover’s Dis- tance (EMD)captures both geometry and point density by solving an optimal transport problem. It seeks a bi- jection ϕ:P → G that minimizes the average distance: EMD(P,G) = min ϕ 1 |P| P p∈P ∥p−ϕ(p)∥ 2, where lower values imply a more accurate reconstruction of the shape distribution. Fin...
-
[2]
Chair”Template from “Table
to capture structural relationships within the com- plete point cloud, using a 12-layer Transformer encoder with embedding dimension 384 and 6 attention heads, and a decoder that outputs point-wise features of dimension d= 256 . For both the feature alignment module and the multi-view camera feature fusion module, we integrate con- textual information int...
2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.